ОПТИМИЗАЦИЯ РЕЖИМОВ РАБОТЫ СИНХРОННЫХ ДВИГАТЕЛЕЙ ДЛЯ ПОВЫШЕНИЯ ПРОПУСКНОЙ СПОСОБНОСТИ СЕТЕЙ ЭЛЕКТРОСНАБЖЕНИЯ ПРОМЫШЛЕННЫХ ПРЕДПРИЯТИЙ Текст научной статьи по специальности «Электротехника, электронная техника, информационные технологии»
Аннотация научной статьи по электротехнике, электронной технике, информационным технологиям, автор научной работы — Клюев Роман Владимирович, Босиков Игорь Иванович, Гаврина Оксана Александровна, Текиев Марат Владимирович
Исследована проблема повышения пропускной способности сетей электроснабжения промышленных предприятий . Повышение пропускной способности является актуальной задачей ввиду планируемого технического перевооружения и введения нового оборудования в связи с развитием предприятий . Представлен анализ режимов работы ряда трансформаторных подстанций , осуществляющих непосредственное питание электротехнического оборудования промышленных установок, а также линий питания данных подстанций . Повышение пропускной способности электрической сети предлагается осуществить за счет компенсации реактивной мощности потребляемой электротехническим оборудованием подстанций для чего предлагается использовать синхронные электродвигатели, применяемые на производственных объектах в качестве привода насосных и компрессорных агрегатов. В работе представлен анализ располагаемой реактивной мощности используемых синхронных электродвигателей. Проведен анализ потерь активной мощности возникающих в синхронных электродвигателях при генерации реактивной мощности . Показано, что повышение пропускной способности линий питания может быть достигнуто за счет выбора оптимального режима работы синхронных электродвигателей. Показано, что при выборе параметров оптимального режима работы синхронного электродвигателя, обеспечивающего повышение пропускной способности линии питания подстанции , необходимо руководствоваться критерием минимума потерь активной мощности. Разработана математическая модель установившегося режима работы подстанции и линии питания с учетом потерь активной мощности в синхронном электродвигателе. С помощью разработанной модели определено оптимальное значение реактивной мощности , которое должен генерировать синхронный двигатель этой подстанции для повышения пропускной способности линии питания при минимуме потерь активной мощности на примере одной подстанции . Представлен расчет тока возбуждения синхронного двигателя, при котором достигается требуемое значение генерируемой реактивной мощности , что необходимо для выбора уставки системы автоматического регулирования возбуждения. Экономическим эффектом от оптимизации режима работы синхронных электродвигателей является уменьшение расходов на оплату электроэнергии, обусловленное уменьшением потерь активной мощности в линии.
i Надоели баннеры? Вы всегда можете отключить рекламу.
Похожие темы научных работ по электротехнике, электронной технике, информационным технологиям , автор научной работы — Клюев Роман Владимирович, Босиков Игорь Иванович, Гаврина Оксана Александровна, Текиев Марат Владимирович
ВЛИЯНИЕ СИСТЕМ УПРАВЛЕНИЯ ВОЗБУЖДЕНИЕМ СИНХРОННОГО ДВИГАТЕЛЯ НА САМОЗАПУСК ПРИ КРАТКОВРЕМЕННОЙ ПОТЕРЕ ПИТАНИЯ
Определение оптимальной величины реактивной мощности синхронных двигателей узлов нагрузки распределительных сетей
Оптимизация режимов работы электротехнических комплексов с синхронными двигателями в современных условиях ценообразования
Технико-экономическая оценка эффективности привлечения синхронных электродвигателей предприятий к генерации реактивной мощности
Выбор параметров режима возбуждения синхронных двигателей карьерных экскаваторов
i Не можете найти то, что вам нужно? Попробуйте сервис подбора литературы.
i Надоели баннеры? Вы всегда можете отключить рекламу.
OPTIMIZATION MODES OF SYNCHRONOUS MOTORS OPERATION TO INCREASE THE CAPACITY OF POWER SUPPLY NETWORKS OF INDUSTRIAL ENTERPRISES
The paper studies the problem of increasing the capacity of power supply networks of industrial enterprises. Increasing the throughput is an urgent task due to the planned technical re-equipment and the introduction of new equipment in connection with the development of enterprises. The paper presents an analysis of the operating modes of a number of transformer substations that directly power the electrical equipment of industrial installations, as well as the power lines of these substations. It is proposed to increase the capacity of the electrical network by compensating for the reactive power consumed by electrical equipment of substations, for which it is proposed to use synchronous electric motors used at production facilities as a drive for pumping and compressor units. The paper presents an analysis of the available reactive power of the used synchronous electric motors. The analysis of active power losses arising in synchronous electric motors during reactive power generation has been carried out. It is shown that an increase in the throughput of power lines can be achieved by choosing the optimal mode of operation of synchronous electric motors. It is shown that when choosing the parameters of the optimal operating mode of a synchronous electric motor, which provides an increase in the throughput of the substation power line, it is necessary to be guided by the criterion of minimum active power losses. A mathematical model has been developed for the steady state operation of a substation and a power line, taking into account active power losses in a synchronous electric motor. With the help of the developed model, the optimal value of reactive power was determined, which the synchronous motor of this substation should generate in order to increase the throughput of the power line with a minimum of active power losses using the example of one substation. The calculation of the excitation current of a synchronous motor is presented, at which the required value of the generated reactive power is achieved, which is necessary to select the setting of the automatic excitation control system. The economic effect of optimizing the operating mode of synchronous electric motors is to reduce the cost ofpaying for electricity, due to a decrease in active power losses in the line.
Текст научной работы на тему «ОПТИМИЗАЦИЯ РЕЖИМОВ РАБОТЫ СИНХРОННЫХ ДВИГАТЕЛЕЙ ДЛЯ ПОВЫШЕНИЯ ПРОПУСКНОЙ СПОСОБНОСТИ СЕТЕЙ ЭЛЕКТРОСНАБЖЕНИЯ ПРОМЫШЛЕННЫХ ПРЕДПРИЯТИЙ»
УДК 621.311 DOI 10.46689/2218-5194-2022-1-1-272-293
ОПТИМИЗАЦИЯ РЕЖИМОВ РАБОТЫ СИНХРОННЫХ ДВИГАТЕЛЕЙ ДЛЯ ПОВЫШЕНИЯ ПРОПУСКНОЙ СПОСОБНОСТИ СЕТЕЙ ЭЛЕКТРОСНАБЖЕНИЯ ПРОМЫШЛЕННЫХ ПРЕДПРИЯТИЙ
Р.В. Клюев, И.И. Босиков, О.А. Гаврина, М.Т. Текиев
Исследована проблема повышения пропускной способности сетей электроснабжения промышленных предприятий. Повышение пропускной способности является актуальной задачей ввиду планируемого технического перевооружения и введения нового оборудования в связи с развитием предприятий. Представлен анализ режимов работы ряда трансформаторных подстанций, осуществляющих непосредственное питание электротехнического оборудования промышленных установок, а также линий питания данных подстанций. Повышение пропускной способности электрической сети предлагается осуществить за счет компенсации реактивной мощности потребляемой электротехническим оборудованием подстанций для чего предлагается использовать синхронные электродвигатели, применяемые на производственных объектах в качестве привода насосных и компрессорных агрегатов. В работе представлен анализ располагаемой реактивной мощности используемых синхронных электродвигателей. Проведен анализ потерь активной мощности возникающих в синхронных электродвигателях при генерации реактивной мощности. Показано, что повышение пропускной способности линий питания может быть достигнуто за счет выбора оптимального режима работы синхронных электродвигателей. Показано, что при выборе параметров оптимального режима работы синхронного электродвигателя, обеспечивающего повышение пропускной способности линии питания подстанции, необходимо руководствоваться критерием минимума потерь активной мощности. Разработана математическая модель установившегося режима работы подстанции и линии питания с учетом потерь активной мощности в синхронном электродвигателе. С помощью разработанной модели определено оптимальное значение реактивной мощности, которое должен генерировать синхронный двигатель этой подстанции для повышения пропускной способности линии питания при минимуме потерь активной мощности на примере одной подстанции. Представлен расчет тока возбуждения синхронного двигателя, при котором достигается требуемое значение генерируемой реактивной мощности, что необходимо для выбора уставки системы автоматического регулирования возбуждения. Экономическим эффектом от оптимизации режима работы синхронных электродвигателей является уменьшение расходов на оплату электроэнергии, обусловленное уменьшением потерь активной мощности в линии.
Ключевые слова: синхронный двигатель, пропускная способность, система электроснабжения, подстанция, реактивная мощность, модель, предприятие.
Электрическая энергия является основным ресурсом, потребляемым любым без исключения промышленным предприятием. Рациональное потребление электрической энергии во многом определяет эффективность технологического процесса, в ходе которого происходит преобразование электроэнергии в другие виды: механическую, тепловую, световую энергию и др.
Активная составляющая электроэнергии непосредственно затрачивается на совершение полезной работы и преобразуется в другие виды энергии. Генерация активной энергии требует затрат первичного энергоносителя на элек-трогенерирующих станциях, что в первую очередь определяет экономическую стоимость электроэнергии. Генерация реактивной энергии не требует затрат энергоносителей, однако в ряде стран Европы действуют дополнительные тарифы на реактивную электроэнергию. В России на данный момент практика взимания платы за реактивную энергию не имеет широкого распространения и применяется в нескольких регионах, однако существует объективная тенденция к её повсеместному внедрению.
Введение дополнительного тарифа на реактивную энергию связано с необходимостью стимулирования потребителей, в условиях рыночной экономики, к снижению объема потребления реактивной энергии. При этом потребитель сам заинтересован в снижении потребления реактивной энергии, что обусловлено рядом негативных факторов, связанных с передачей реактивной электроэнергии по линиям электроснабжения. К таким факторам относятся: дополнительные потери активной мощности, вызванные протеканием реактивного тока в линии; снижение напряжения в точке подключения потребителя; увеличение суммарного тока в линии за счет дополнительной реактивной составляющей тока. Последнее с учетом ограниченного значения максимального тока линии, определяемого сечением проводников, приводит к уменьшению возможности загрузки линии активным током, т.е. приводит к уменьшению пропускной способности линии.
Ограничение пропускной способности линий электропередачи представляет собой серьезную проблему в условиях развивающегося предприятия, так как существующие сети не способны обеспечить вводимую новую нагрузку электроэнергией [1, 2].
Одним из способов повышения пропускной способности сетей является компенсация реактивной энергии за счет технических средств потребителя электроэнергии. Под техническими средствами потребителя понимается установка дополнительного оборудования (компенсаторы реактивной мощности) для генерации реактивной энергии, потребляемой нагрузкой потребителя или оптимизация режима работы электротехнического оборудования [35]. Последний способ представляется наименее затратным, так как не требует установки дополнительного оборудования в связи, с чем должен рассматриваться в первую очередь.
Соотношение потребляемой реактивной и активной энергий в первую очередь определяется типом используемого электротехнического оборудования и режимом его работы. Основной нагрузкой в современной промышленности являются электродвигатели переменного тока, доля которых в общем объеме потребления электроэнергии достигает 60%. Наличие в составе парка мощных синхронных электродвигателей среднего класса напряжения позволяет использовать их в качестве компенсаторов реактивной энергии для по-
вышения пропускной способности сетей электроснабжения. Оптимизация режима работы синхронных электродвигателей ввиду перспектив развития предприятия, связанных с введением нового оборудования и относительно устаревшими сетями представляется актуальной задачей [6, 7]. Целью работы является анализ режима работы электротехнического оборудования промышленных предприятий и его воздействия на сеть электроснабжения для определения оптимального режима работы синхронных двигателей, обеспечивающего повышение пропускной способности и минимизацию потерь в сети.
Показатели потребления электрической энергии
Для электроснабжения крупных промышленных предприятий используются трёхфазные электрические сети. В случае симметричной нагрузки для упрощения анализа используют однолинейные схемы (рис. 1).
Рис. 1. Схема замещения участка линии электроснабжения подстанции предприятия
На рис. 1 приняты следующие обозначения: Е — действующее значение фазного ЭДС источника бесконечной мощности, В; Ял — активное сопротивление фазы кабельной линии электропередач, Ом; Хл — индуктивное сопротивление фазы кабельной линии электропередач, Ом; Рн — активная мощность, потребляемая обобщенной нагрузкой на вводе подстанции, Вт; QH — реактивная мощность, потребляемая нагрузкой на вводе подстанции, ВАр.
В установившемся режиме работы нагрузки справедлив треугольник мощностей (рис. 2), визуально иллюстрирующий соотношение потребляемой нагрузкой активной и реактивной энергии.
Для упрощения анализа режима работы нагрузки используют коэффициенты активной мощности Kp и коэффициент реактивной мощности Kq, которые выражаются из треугольника мощностей (рис. 2).
Коэффициент активной мощности
Kp = cos ф = —Н , (1)
где Sh — полная мощность, ВА; ф — угол сдвига фаз.
Рис. 2. Треугольник мощностей
Коэффициент реактивной мощности
Коэффициенты Кр и Кч используются для определения эффективности работы электротехнического оборудования и электрических сетей. Максимальная эффективность преобразования электрической энергии достигается при значении Кр=1 (Кд=0), что соответствует потреблению чисто активной электроэнергии. На практике в сетях переменного тока достижение такого значения показателя невозможно, высокими значениями считаются Кр>0,95.
Оценка влияния нагрузки на процесс передачи электроэнергии при известных параметрах линии проводится по следующим показателям: — потери активной мощности в кабельных линиях
где и — действующее значение фазного напряжения, подводимого к нагрузке, В;
— падение напряжения в линии
где 8 л =—коэффициент сопротивления линии;
— сила тока в линии
доля потерь, связанных с передачей реактивной энергии,
вклад реактивной энергии в падение напряжения линии
доля реактивного тока в линии
При Кд=0 значения показателей (6) — (8) также равны нулю, при этом значения величин (3) — (5) минимальны. При значении = 0 пропускная способность линии максимальна. Таким образом, для повышения пропускной способности линии электропередач необходимо минимизировать реактивную мощность, потребляемую нагрузкой.
Анализ режима работы линий электропередач предприятия В связи с целью работы, заключающейся в использовании синхронных двигателей в качестве компенсаторов реактивной мощности для повышения пропускной способности линий электропередач, в качестве объектов исследования были выбраны подстанции, нагрузка которых включает синхронные электродвигатели. Такими подстанциями являются РТП — 1 — 4. Синхронные двигатели, получающие питание от указанных подстанций, применяются для привода поршневых компрессоров (ПК) и центробежных насосов. Особенностью привода поршневых компрессоров является резко переменный характер механической нагрузки, что отражается на характере изменения параметров режима работы синхронного двигателя, таких как ток статора, активная и реактивная мощность. Для упрощения проведения анализа будем считать нагрузку электродвигателей неизменной во времени.
Для проведения анализа режима работы электрических сетей предприятия по выражениям (1) — (8) были использованы данные из системы диспетчеризации БСЛОЛ, позволившие определить значения активной и реактивной мощности потребляемой каждой подстанцией. Параметры кабельной линии для каждого ввода подстанции были определены с использованием справочной информации. Результаты анализа сведены в табл. 1.
Сети рассматриваемого предприятия, по которым осуществляется передача электроэнергии до распределительных подстанций, относятся к сетям среднего класса напряжения, т.к. действующее значение фазного напряжения составляет 6кВ. Таким образом, максимально допустимое значение коэффициента реактивной мощности составляет 0,4.
Анализ представленных в табл. 1 результатов расчета показывает, что в настоящий момент потребление реактивной энергии подстанциями удовлетворяет нормам, и даже в случае введения дополнительного тарифа на потребляемую реактивную энергию не приведет к увеличению затрат, связанных с оплатой электроэнергии.
Результаты расчета режима работы кабельных линий
№ РТП № ввода Рн, кВт е* кВар К АРл, кВт 1л, А Аил, В % diq , % dUq , %
1 1 1461 290 0.198 11,67 138,7 48,92 3,8 1,9 6,8
2 786 131 0,167 3,19 78 26 2,7 1,3 5,8
2 1 1900 -605 -0,318 20 185,7 52,3 9,2 4,7 13,3
2 1715 170 0,099 14,95 160,5 55,4 0,97 0,48 3,5
3 1 1300 200 0,154 11,2 122,5 54,8 2,3 1,16 4,6
2 1000 200 0,2 6,7 94,9 42,7 3,8 1,94 5,9
4 1 3600 -270 -0,075 64 336 114,5 0,599 0,28 4
2 1050 320 0,305 5,9 102 37,5 8,5 4,3 14,7
Наиболее загруженными реактивным током являются кабельные линии, питающие Ввод №1 РТП-2 и Ввод №2 РТП-4. Доля реактивного тока в этих линиях составляет 4,7 % и 4,3 % соответственно. Для всех остальных линий доля реактивного тока не превышает 2 %. Наибольшие потери активной мощности от передачи реактивной энергии также наблюдаются в линиях Ввода №1 РТП-2 и Ввода №2 РТП-4 и составляют 9,2 % и 8,5 % соответственно. Необходимо отметить особенность режима работы линий Ввода №1 РТП-2 и Ввода №1 РТП-4, которая заключается в отрицательном значении реактивной мощности, что означает режим перекомпенсации электроэнергии. Данное обстоятельство связано с тем, что суммарная генерируемая реактивная мощность синхронными двигателями, которые находятся в работе на этих подстанциях, превышает потребляемую прочей нагрузкой реактивную мощность. В результате избыточная реактивная мощность отдается в сеть 6кВ, загружая линии, питающие эти подстанции [8-10]. Для повышения пропускной способности линий электропередач необходимо уменьшить потребляемую нагрузкой подстанций реактивную мощность, а в случае с РТП-2 и РТП-4 вводы №1 необходимо уменьшить реактивную мощность, отдаваемую в электрическую сеть [11, 12]. Для управления синхронными двигателями на предприятии применяются тиристорные возбудители, программное обеспечение, которых позволяет реализовать требуемые условия для осуществления генерации реактивной мощности, что делает возможным использование применяемых синхронных двигателей для решения задачи компенсации реактивной мощности.
Располагаемая реактивная мощность синхронных двигателей
Чтобы использовать синхронный двигатель для генерации реактивной мощности в сеть необходимо определить значение реактивной мощности, которое двигатель способен генерировать [13-15]. Значение располагаемой двигателем реактивной мощности ограничено температурным
режимом обмоток статора и ротора, что отображено на PQ — диаграмме синхронного двигателя, которая представлена на рис.3.
Квадранты I и II ортогональной системы координат на рис. 3 соответствуют двигательному режиму работы синхронной машины. При этом квадрант I — соответствует работе машины в режиме перевозбуждения, поэтому значения Q отрицательны для этого квадранта.
Рис. 3. РЦ-диаграмма синхронного явнополюсного двигателя: А — область допустимой работы синхронного двигателя, 1 — ограничение по температурному режиму статорных обмоток; 2 — ограничение температурного режима обмоток ротора; 3 — граница минимального возбуждения; 4 — ограничение устойчивости; Б — рабочая точка номинального режима работы; Б1, Б2 — рабочие точки возможного режима работы с нагрузкой Р1
i Не можете найти то, что вам нужно? Попробуйте сервис подбора литературы.
На рис. 3 область А, ограниченная кривыми 1, 2, 3 и 4 представляет собой зону, внутри которой любая точка будет определять координаты конца вектора полной мощности, удовлетворяющего всем ограничениям. В Ьм квадранте такими ограничениями являются ограничения по температурному режиму обмоток статора и ротора (кривые 1 и 2).
Точка Б на рис. 3 соответствует номинальному режиму работы двигателя в зоне перевозбуждения. При номинальном режиме работы располагаемая реактивная мощность может изменяться только в сторону уменьшения от номинальной, так как действуют ограничения по температурному режиму как статора, так и ротора. При снижении активной мощности возможность по отдаче реактивной мощности возрастает, в таком случае располагаемая реактивная мощность ограничивается только температурным режимом обмоток ротора.
При известных параметрах границ 1 и 2, а также заданной активной мощности двигателя, по PQ диаграмме определяется значение максимально возможной реактивной мощности в зоне перевозбуждения.
С учетом технических данных и параметров текущего режима работы двигателей были определены значения максимальной доступной реактивной мощности Од1*, которую способны генерировать двигатели в сеть [16, 17]. Значение располагаемой реактивной мощности Qрасп определяется как разность между максимально доступной мощностью и мощностью, генерируемой синхронным двигателем в текущем режиме ОТдек Результаты представлены в табл. 2.
Располагаемая реактивная мощность синхронных двигателей
№ РТП № Ввода Обозначение двигателя -рном Рсд кВт -ртек Рсд кВт атг, кВар Рсд опт, кВар Орасп, кВар
1 1 СД-4 830 300 120 0,357 600 480
1 СД-5 830 300 120 0,357 600 480
2 СД-1 830 157 225 0,187 600 375
2 1 ПК-1 1000 730 210 0,73 675 465
1 ПК-3 2000 960 740 0,48 1350 610
2 ПК-4 2000 633 500 0,317 1350 850
3 1 СД-1 400 327 10 0,82 225 215
2 СД-4 400 327 10 0,82 225 215
4 1 ПК 101/1 4000 2900 450 0,725 2667 2217
2 ПК 101/2 (В резерве) 4000 2900 450 0,725 2667 2217
Сравнение располагаемой мощности синхронных двигателей Орасп,
представленных в табл. 2, с данными Qн из табл. 1 позволяет сделать вывод, что применяемые синхронные двигатели имеют достаточный запас реактивной мощности для обеспечения полной компенсации в линиях питания подстанций, на которых они установлены.
Экономическая эффективность использования синхронных двигателей для компенсации реактивной мощности
Важным моментом при рассмотрении синхронного двигателя в качестве средства компенсации реактивной мощности необходимо учитывать такой параметр, как потери активной мощности синхронного двигателя при генерации реактивной мощности АРсд.
Потери синхронного двигателя на генерацию реактивной мощности определяются по формуле
где АРсд — потери в синхронном двигателе на генерацию реактивной мощности, Вт; Э> и Э — справочные коэффициенты, Вт; йсд — генерируемая синхронным двигателем реактивная мощность, ВАр; й^ — генерируемая
синхронным двигателем реактивная мощность, ВАр.
Используя значения В\ и Э2, рассчитаем дополнительные затраты активной мощности синхронных двигателей на компенсацию реактивной мощности нагрузки QИ, значения которой указаны в табл. 1.
Потери активной мощности в синхронном двигателе при генерации реактивной мощности необходимо сравнить с потерями активной мощности в линиях электроснабжения, вызванных передачей некомпенсированной реактивной мощности. Для этого определим мощность активных потерь в линиях без компенсации. Используя данные таблицы 1, рассчитаем абсолютное значение потерь в линии по формуле
Результаты расчета по формулам (9), (10) сведем в табл. 3.
Результаты расчета потерь мощности в синхронных двигателях на компенсацию реактивной мощности в линии
№ № Обозначение АРф, АРсд, АРсд
РТП Ввода двигателя кВт кВт АР*Л
1 СД-4 0,443 5,85 26,4
2 СД-1 0,085 4.2 49,4
1 ПК-1 1,84 18,57 10
2 ПК-4 0,14 4,2 30
3 1 СД-1 0,25 6,3 25,2
2 СД-4 0,25 6,3 25,2
4 1 ПК 101/1 0,383 2,8 7,3
2 ПК 101/2 0,5 1,9 3,8
Последний столбец в табл. 3 показывает отношение потребляемой синхронными двигателями активной мощности на компенсацию текущего
значения потребляемой нагрузкой реактивной мощности к значению потерь активной мощности вызванной передачей некомпенсированной реактивной мощности по линиям электроснабжения. Как видно из результатов расчета, представленных в табл. 3 для компенсации реактивной мощности потребляемой из сети нагрузкой при помощи синхронных двигателей необходимо затратить активной энергии в несколько раз больше, чем мощность потерь в линии питания, которая вызвана передачей реактивной мощности по линии. Исключение составляют значения в ячейках, принадлежащих Вводу №1 РТП-2 и Вводу №2 РТП-4, для этих подстанций значения АРсд рассчитаны для текущего режима работы, т.к. синхронные двигатели в текущем режиме обеспечивают перекомпенсацию реактивной мощности [18-20].
Таким образом, на основании проведенного анализа следует, что при существующих линиях электропередач, мощности нагрузки и применяемых синхронных электродвигателях применение последних в качестве средств компенсации реактивной мощности не имеет экономического обоснования ввиду того, что активная мощность, затрачиваемая синхронными двигателями, превосходит мощность потерь в линии, вызываемую передачей реактивной энергией нагрузки. При этом перекомпенсация реактивной энергии на подстанциях РТП-2 и РТП-4 является не рациональным режимом работы, т.к. генерируемая в сеть реактивная мощность снижает пропускную способность линии и вызывает дополнительные потери мощности. Для этих подстанций необходимо рассмотреть возможность снижения генерируемой синхронными двигателями реактивной мощности.
Математическая модель установившегося режима работы линии электроснабжения с учетом потерь в синхронном электродвигателе
Для выбора оптимального режима работы синхронного электродвигателя с целью повышения пропускной способности линии питания подстанции при условии минимума потерь активной мощности необходимо получить математическую модель, описывающую режим работы линии питания и нагрузки с учетом потерь мощности в синхронном двигателе.
Требуемая математическая модель должна учитывать изменение активной и реактивной мощности потребляемой нагрузкой подстанцией, потери активной мощности в линии питания и загрузку линии питания реактивным током в функции от генерируемой синхронным электродвигателем реактивной мощности.
Для этого необходимо преобразовать выражения (2), (3) и (8) с учетом выражения (9).
Сначала введем начальные условия, которым будет соответствовать работа синхронного двигателя в режиме без генерации реактивной мощности (собственный со^ф = 0). Активная мощность, потребляемая нагрузкой без потерь в синхронном двигателе на генерацию реактивной мощности в текущем режиме работы, определяется как
Рбезсд = Рн -АРТ, (11)
где: АРТдек — потери в синхронном двигатели на генерирование реактивной мощности в текущем режиме работы, кВт.
Зависимость мощности, потребляемой нагрузкой, от реактивной мощности, генерируемой синхронным двигателем с учетом выражения (9) примет вид
Рн (бсд) = РбеЗСд + °2
Зависимость коэффициента реактивной мощности от (есд)
Зависимость потерь в линии от есд
Рн есд)2 • Ял -(1 + Кан есд)2)
АРл(есд) = н^сд-1-ан^сд’ \ (14)
Зависимость загрузки линии реактивным током
Выражения (12) — (15) представляют собой математическую модель, которая описывает множество установившихся режимов работы линии питания и нагрузки при различных значениях величины реактивной мощности генерируемой синхронным электродвигателем.
Определить значение генерируемой реактивной мощности синхронным двигателем, при которой достигается минимизация потерь активной мощности, можно двумя способами:
— найти значение реактивной мощности при равенстве нулю частной производной выражения (14) по величине есд;
— найти значение есд , удовлетворяющее заданными требованиям используя графоаналитический метод.
Реализация последнего способа осуществляется в любой среде математического моделирования.
Определение оптимального режима работы синхронных электродвигателей подстанции РТП-2 Ввод №1 и РТП-4 Ввод №1
Определим оптимальный режим работы синхронных двигателей подстанции ПК-1 и ПК-3 для подстанции РТП-2. Для этого необходимо построить графики зависимостей (12) — (15) в диапазоне изменения суммарной реактивной мощности этих двигателей
0. ебезсд. Построение производится в среде математического моделирования МаШсаё.
На рис. 4 представлены кривые зависимостей, характеризующие режим работы линии питания подстанции.
Рис. 4. Параметры режима работы линии питания Ввода №1РТП-2: 1 — мощность потерь в линии; 2 — доля реактивного тока в составе полного тока; 3 — коэффициент реактивной мощности Ввода № 2; 4 — активная мощность, потребляемая на Вводе №2
Точка А соответствует текущему режиму работы. Особенностью работы рассматриваемой линии является её работа в режиме перекомпенсации, что видно по значения коэффициента реактивной мощности (кривая 3), который имеет отрицательное значение, при этом точка А лежит на кривой реактивного тока (2) справа от экстремума этой кривой. В данном случае задача повышения пропускной способности может быть достигнута за счет снижения генерируемой реактивной мощности синхронными двигателями на подстанции. Наиболее оптимальным режимом работы рассматриваемой линии будет такой режим генерации реактивной мощности при котором рабочая точка займет положение Б, так как именно в этом режиме будет достигаться минимиум кривой потерь мощности (кривая 1) в линии. Как видно из рис.4 снижение генерации реактивной мощности синхронными двигателями приведет к снижению потребления активной мощности на величину АРн, что составляет 2,9 %. Повышение пропускной сопособности линии при этом составит 4,56 %. Коэффициент реактивной мощности для режима Б составляет 0,05. Значение реактивной мощности соответствующее точке Б на кривой потребляемой на вводе №1 мощности, является оптимальным
значением генерируемой синхронными двигателями реактивной мощности и может быть использовано в качестве задания при настройке системы управления тиристорных возбудителей.
i Не можете найти то, что вам нужно? Попробуйте сервис подбора литературы.
Аналогичное построение можно провести для линии Ввода №1 подстанции РТП-2.
Таким образом, повышение пропускной способности линии питания Ввода № 1 подстанции РТП-2 и Ввода №1 подстанции РТП-4 достигается за счет уменьшения генерируемой синхронными двигателями реактивной мощности. При этом за счет минимизации потребляемой активной мощности и повышении пропускной способности обеспечивается наиболее оптимальный режим работы линии питания. Значение реактивной мощности при которой достигается оптимальный режим работы определяется при помощи графоаналитического метода с использованием предложенной математической модели.
Определение уставки тока возбуждения системы управления тиристорного возбудителя для реализации оптимального режима
работы подстанции РТП-2
От РТП-2 Ввод №1 питание получают два синхронных двигателя ПК-1 и ПК-3. Уменьшение генерируемой реактивной мощности за счет уменьшения возбуждения двигателя ПК-3 представляется наиболее рациональным, т.к. двигатель ПК-3 в сравнении с ПК-1 имеет большие потери активной мощности на генерацию реактивной.
Для управления синхронными электродвигателями на предприятии применяются тиристорные возбудители, выполненные на осонове системы управления двигателями постоянного тока Simoreg Siemens. Основным режимом работы системы автоматического регулирования возбуждения является режим стабилизации тока возбуждения. Основной уставкой системы АРВ является заданное значение тока возбуждения, которое поддерживается в обмотке ротора синхронной машины.
Для реализации оптимального режима работы подстанции необходимо рассчитать ток возбуждения, при котором синхронный двигатель будет вырабатывать требуемое значение реактивной энергии.
Для нахождения требуемого значения тока возбуждения необходимо располагать V-образной характеристикой машины. Однако в условиях отсутствия такой информации задача по определению тока статора может быть решена аналитическим путем.
Значение тока возбуждения при определенном режиме работы двигателя можно определить по графику зависимости ЭДС статора от тока возбуждения Eo(Ie). С определнной погрешностью зависимость Eo(Ie) может быть построена по известным значениям тока возбуждения 1в, и расчетным значениям ЭДС статора Eo.
Для проведения рассчета ЭДС статора необходимо воспользоваться схемой замещения синхронной машины, представленной на рис. 5. Для
использования данной схемы в анализе установившегося реджима работы сихронного двигателя в схему вводится комплексное сопротивелние 2н (рис. 5), что позволяет учитывать в расчете активную мощность потребляемую механической нагрузкой и реактивную мощность отдаваемую в сеть.
Рис. 5. Схема замещения СД с учетом нагрузки
Комплексное сопротивление 2н представляет собой сумму активного сопротивление нагрузки Ян и реактивного сопротивление нагрузки Хн. Электрическая мощность рассеиваемая на активном сопротивлении Ян представляет мощность потребляемую механической нагрузкой. Реактивное сопротивление Хн служит для представления процесса обмена реактивной энергии между двигателем и сетью.
Значения сопротивлений Ян и Хн расчитываются исходя из значения величин потребляемой нагрузкой активной мощности Рн и отдаваемой реактивной мощности Qн, как и ток статора 73. К клеммам а и б приложено фазное напряжение сети и1, которое остается неизменным. Т.к. при различной загруженности синхронного двигателя активная и реактивная мощности изменяются, а напряжение сети остается неизменным, то каждому новому режиму работы будет соответствовать различные значения активного и реактивного сопротивлений нагрузки. Реактиное синхронное сопротивление Хс является параметром двигателя, пренебрегая насыщением примем, что Хс=свт1 . Для проведения дальнейших расчетов необходимо определить значение синхронного сопротивления, что возможно сделать при рассмотрении номинального режима работы синхронного двигателя.
Параметры номинального режима работы двигателя ПК-3: 7^=226 А; ^1=6000 В; Рном=2000 кВт; Qном=1020 кВАр; ^фном=0,51; п=0,953.
В номинальном режиме работы действующее значение ЭДС статора составляет Е1°м = 1,08 • их. Отдаваемая двигателем активная мощность рном = ^ Активное сопротивление фазной обмотки статора Я1 примем
равным 0. В номинальном режиме Оном = 0НОЛ,. Сдвиг фаз между током и
напряжением нагрузки фН°м = атсг^ (0,51) = 27 (эл.гр.).
Активное сопротивелние нагрузки определяется по формуле:
Реактивное сопротивление нагрузки определяется соответственно:
Синхронный двигатель и компенсатор
Принципы действия синхронной машины в режиме генератора и двигателя. Значение электромагнитного момента на угловой характеристике синхронного двигателя, способы возникновения магнитной связи между статором и ротором. Назначение синхронного компенсатора.
| Рубрика | Физика и энергетика |
| Вид | контрольная работа |
| Язык | русский |
| Дата добавления | 15.02.2015 |
| Размер файла | 1,4 M |
- посмотреть текст работы
- скачать работу можно здесь
- полная информация о работе
- весь список подобных работ
Отправить свою хорошую работу в базу знаний просто. Используйте форму, расположенную ниже
Студенты, аспиранты, молодые ученые, использующие базу знаний в своей учебе и работе, будут вам очень благодарны.
Размещено на http://www.allbest.ru/
Синхронный двигатель и синхронный компенсатор
Принцип действия синхронного двигателя
В соответствии с принципом обратимости электрических машин синхронная машина может работать не только в режиме генератора, но и в режиме двигателя, т. е. потреблять из сети электрическую энергию и преобразовывать ее в механическую.
Для объяснения принципа работы синхронного двигателя представим себе синхронный генератор, включенный на параллельную работу в сеть большой мощности.
Допустим, приводной двигатель вращает ротор генератора против часовой стрелки с угловой скоростью . При этом нагрузка генератора такова, что продольная ось полюсов ротора смещена относительно оси вращающегося поля на угол в направлении вращения ротора (рис. 22.1, справа). Вращающий момент приводного двигателя уравновешивается суммой электромагнитного момента генератора М’ и момента х.х. М0 (). На угловой характеристике этому режиму генератора соответствует точка Г.
Если уменьшать вращающий момент, то нагрузка генератора начнет также уменьшаться, при этом будет уменьшаться угол , а следовательно, и ток статора ). В итоге снизится величина электромагнитного момента М’ и при вращающем моменте угол , т. е. генератор будет работать в режиме х. х. ( = 0) и ЭДС генератора Е0 окажется в противофазе с напряжением сети . Этому режиму на угловой характеристике соответствует точка пересечения осей координат (точка О на рис. 22.1). Если же вал синхронной машины отсоединить от приводного двигателя и создать на этом валу тормозной момент, т.е. момент нагрузки М2, направленный встречно вращению ротора машины, то произойдет смещение вектора ЭДС на угол — относительно его положения в режиме х. х. в сторону отставания (рис. 22.1, слева). При этом в цепи обмотки статора появится результирующая ЭДС , которая создаст в обмотке статора ток , отстающий по фазе от ЭДС на угол 90° (предполагается ) и отстающий по фазе от напряжения сети е на угол (в генераторном режиме ток , отстает по фазе от ЭДС Е0 на угол ).
Рис. 22.1. Переход синхронной машины из генераторного режима в двигательный
Рис. 22.2. Угловая характеристика синхронного двигателя
Ток создает магнитное поле, вращающееся синхронно с ротором, ось которого смещена относительно продольной оси полюсов ротора на угол — . Допустим, работа двигателя происходит в режиме точки Д на угловой характеристике (рис. слева), что соответствует углу — . Возникшие при этом тангенциальные составляющие сил магнитного взаимодействия полюсов создадут на роторе двигателя электромагнитный момент М», направленный согласно с вращающим магнитным полем и приводящий ротор во вращение с синхронной частотой . При этом синхронная машина будет потреблять из сети электрическую энергию и преобразовывать ее в механическую энергию вращения. Вращающий электромагнитный момент М» преодолевает момент х. х. и создает на валу двигателя полезный момент , под действием которого приводится во вращение исполнительный механизм:
Все значения момента на угловой характеристике синхронного двигателя откладываются в отрицательном направлении оси ординат, так как при переходе синхронной машины из генераторного режима в двигательный электромагнитный момент меняет свое направление. Также отрицательной становится мощность синхронного двигателя, которая поступает из сети в машину, а не из машины в сеть, как это происходит в генераторном режиме. Оперирование с отрицательными значениями мощностей и моментов крайне неудобно, поэтому при рассмотрении синхронных двигателей условно будем принимать моменты и мощности положительными, помня при этом изложенное ранее о направлении этих параметров.
Электромагнитная мощность синхронного двигателя определяется выражениями (2 1 .7) и (2 1 .8), а электромагнитный момент — (2 1.9) и (2 1.10).
Угловые характеристики электромагнитного момента и его составляющих и представлены на рис. 22.2. Эти характеристики отличаются от угловых характеристик генератора (см. рис. 21.5) лишь тем, что располагаются в третьем квадранте осей координат, т. е. определяются отрицательными значениями углов и моментов и а также момента при .
Таким образом, в общем виде угловая характеристика синхронной машины представляет собой две полуволны результирующего момента М: положительную, соответствующую генераторному режиму работы (см. рис. 21.5), и отрицательную, соответствующую двигательному режиму работы (рис. 22.2). Переход машины из одного режима работы в другой происходит при .
Устойчивая работа синхронного двигателя соответствует участку угловой характеристики (рис. 22.2) при .
Отношение максимального электромагнитного момента к номинальному [см. (21.16)] определяет перегрузочную способность синхронного двигателя
Обычно перегрузочная способность синхронных двигателей , что при номинальной нагрузке двигателя соответствует эл. град.
Ротор синхронного двигателя может вращаться только с синхронной частотой . Чтобы убедиться в этом, достаточно предположить, что ротор двигателя начнет вращаться с частотой . В какой-то момент времени намагниченные полюсы ротора расположатся против одноименных полюсов вращающегося магнитного поля статора и тогда нарушится магнитная связь между намагниченными полюсами ротора и полюсами вращающегося поля статора, так как их одноименные полюсы будут взаимно отталкиваться и ротор, перестав испытывать устойчивое действие вращающего электромагнитного момента, остановится.
Вращение ротора синхронных двигателей только с синхронной частотой составляет характерную особенность этих двигателей и часто определяет область их применения (например, для привода устройств, требующих стабильной частоты вращения).
При изменениях нагрузки на валу синхронного двигателя меняется угол . При этом ротор вследствие инерции вращающихся масс агрегата не сразу занимает положения, соответствующие новой нагрузке, а некоторое время совершает колебательные движения. Таким образом, в синхронном двигателе, так же как и в генераторе, имеют место колебания (физическая сущность этого явления изложена в § 21.4).
По своей конструкции синхронные двигатели в принципе не отличаются от синхронных генераторов, но все же имеют некоторые особенности. Их изготовляют преимущественно явнополюсными с полюсов; воздушный зазор делают меньшим, чем в генераторах такой же мощности, что способствует улучшению ряда параметров двигателя, в частности уменьшению пускового тока; демпферную (успокоительную) обмотку выполняют стержнями большего сечения, так как при пуске двигателя она является пусковой обмоткой (см. § 22.2); ширина полюсного наконечника достигает вместо в генераторах. Поэтому, несмотря на свойство обратимости, синхронные машины, выпускаемые промышленностью, имеют обычно целевое назначение — либо это синхронные генераторы, либо синхронные двигатели.
Пуск синхронных двигателей
Пуск синхронного двигателя непосредственным включением в сеть невозможен, так как ротор из-за своей значительной инерции не может быть сразу увлечен вращающимся полем статора, частота вращения которого устанавливается мгновенно. В результате устойчивая магнитная связь между статором и ротором не возникает. Для пуска синхронного двигателя приходится применять специальные способы, сущность которых состоит в предварительном приведении ротора во вращение до синхронной или близкой к ней частоте, при которой между статором и ротором устанавливается устойчивая магнитная связь.
В настоящее время практическое применение имеет способ пуска, получивший название асинхронного. Этот способ пуска возможен при наличии в полюсных наконечниках ротора пусковой обмотки (клетки), аналогичной успокоительной обмотке синхронного генератора (см. рис. 21.8). Схема включения двигателя при этом способе пуска приведена на рис. 22.3, а. Невозбужденный синхронный двигатель включают в сеть. Возникшее при этом вращающееся магнитное поле статора наводит в стержнях пусковой клетки ЭДС, которые создают токи .
Рис. 22.3. Асинхронный пуск синхронного двигателя
Взаимодействие этих токов с полем статора вызывает появление на стержнях пусковой клетки электромагнитных сил . Под действием этих сил ротор приводится во вращение (рис. 22.3, б). После разгона ротора до частоты вращения, близкой к синхронной , обмотку возбуждения подключают к источнику постоянного тока. Образующийся при этом синхронный момент [см. (21.10)] втягиваем ротор двигателя в синхронизм. После этого пусковая обмотка двигателя выполняет функцию успокоительной обмотки, ограничивая качания ротора (см. § 21.4).
Чем меньше нагрузка на валу двигателя, тем легче его вхождение в синхронизм. Явнополюсные двигатели малой мощности, пускаемые без нагрузки на валу, иногда входят в синхронизм лишь за счет реактивного момента, т. е. даже без включения обмотки возбуждения.
С увеличением нагрузочного момента на валу вхождение двигателя в синхронизм затрудняется. Наибольший нагрузочный момент, при котором ротор синхронного двигателя еще втягивается и синхронизм, называют моментом входа двигателя в синхронизм . Величина асинхронного момента при частоте вращения зависит от активного сопротивления пусковой клетки, т. е. от сечения стержней и удельного электрического сопротивления металла, из которого они изготовлены (см. рис. 13.).
Следует обратить внимание, что выбор сопротивления пусковой клетки , соответствующего значительному пусковому моменту , способствует уменьшению момента входа в синхронизм и, наоборот, при сопротивлении , соответствующем небольшому пусковому моменту (), момент входа в синхронизм увеличивается (рис. 22.4).
Рис. 22.4. Асинхронные моменты при пуске синхронного двигателя:
, — основной момент;
— момент входа в синхронизм
В процессе асинхронного пуска обмотку возбуждения нельзя оставлять разомкнутой, так как магнитный поток статора, пересекающий ее в начальный период пуска с синхронной скоростью, наводит в ней ЭДС. Вследствие большого числа витков обмотки возбуждения эта ЭДС достигает значений, опасных как для целости изоляции самой обмотки, так и для обслуживающего персонала. Для предотвращения этого обмотку возбуждения на период разгона ротора замыкают на активное сопротивление , примерно в десять раз большее сопротивления обмотки возбуждения. Переключение зажимов И1 и И2 обмотки возбуждения с сопротивления на зажимы возбудителя осуществляют переключателем П (см. рис. 22.3, а).
Замыкание накоротко обмотки возбуждения на время пускания двигателя нежелательно, так как при этом обмотка ротора образует однофазный замкнутый контур, взаимодействие которого с вращающимся полем статора также создает дополнительный асинхронный момент . Однако при частоте вращения, равной половине синхронной, этот момент становится тормозящим (рис. 22.4) и создает «провал» в характеристике пускового (асинхронного) момента (пунктирная кривая). Это заметно ухудшает пусковые свойства синхронного двигателя.
При асинхронном пуске синхронного двигателя возникает значительный пусковой ток. Поэтому пуск синхронных двигателей непосредственным включением в сеть на номинальное напряжение применяют при достаточной мощности сети, способной выдерживать без заметного падения напряжения броски пускового тока пяти- или семикратного значения (по сравнению с номинальным током). Если же мощность сети недостаточна, то можно применить пуск двигателя при пониженном напряжении (см. § 15.2): автотрансформаторный или реакторный.
U-образные и рабочие характеристики синхронного двигателя
U-образные характеристики. В процессе работы синхронного двигателя в его обмотке статора наводятся ЭДС, сумма которых [см. (20.29)] приблизительно равна подведенному к обмотке статора напряжению сети . Эта сумма ЭДС эквивалентна результирующему магнитному полю, вызванному действием двух магнитодвижущихся сил: возбуждения и статора .
При неизменном напряжении сети результирующее магнитное поле постоянно. Поэтому при изменении МДС возбуждения (изменении тока возбуждения ) МДС статора изменяется таким образом, чтобы их совместное действие оставалось неизменным, т. е. чтобы оставалось неизменным результирующее магнитное поле синхронного двигателя. Это изменение МДС может происходить только за счет изменения величины и фазы тока статора , т. е. за счет изменения реактивной составляющей тока статора .
Например, при увеличении тока возбуждения начиная от наименьшего его значения возрастает МДС ротора, при этом МДС статора уменьшается. Это уменьшение МДС происходит при уменьшении индуктивной (по отношению к напряжению сети ) составляющей тока статора , которая оказывает на магнитную систему подмагничивающее влияние.
При этом полный ток статора уменьшается, а коэффициент мощности двигателя , увеличивается. При некотором значении тока возбуждения индуктивная составляющая тока статора падает до нуля. При этом ток статора достигнет минимального (при данной нагрузке) значения, так как станет чисто активным , а коэффициент мощности, = 1.
Увеличение тока возбуждения сверх значения , т. е. перевозбуждение двигателя, вызовет увеличение тока , но теперь этот ток будет опережающим (емкостным) по отношению к напряжению . Таким образом, при недовозбужденш синхронный двигатель работает с отстающим током, а при перевозбуждении — с опережающим. Зависимость тока статора от тока возбуждения для синхронного двигателя представлена U-образными характеристиками (рис. 22.5). Ток возбуждения соответствует работе синхронного двигателя при коэффициенте мощности = 1. При перевозбуждении двигателя в цепи статора появляется опережающий ток.
Иначе говоря, синхронный двигатель является генератором реактивного тока: индуктивного по отношению к напряжению сети при недовозбуждении и емкостного при перевозбуждении. Указанная способность синхронных двигателей является их ценным качеством, которое используют для повышения коэффициента мощности электрических установок.
Аналогично синхронному генератору, включенному на параллельную работу с сетью (см. § 21.6), синхронный двигатель имеет предел устойчивости при минимальном токе возбуждения (штриховая линия в левой части рис. 22.5).
Рабочие характеристики. Рабочие характеристики синхронного двигателя представляют собой зависимость частоты вращения ротора , потребляемой мощности , полезного момента , коэффициента мощности , и тока в обмотке статора от полезной мощности двигателя (рис. 22.). Частота вращения ротора всегда равна синхронной частоте , поэтому график имеет вид прямой, параллельной оси абсцисс. Полезный момент на валу синхронного двигателя . Так как рабочие характеристики снимают при условии , то график имеет вид прямой, выходящей из начала координат. Мощность на входе двигателя . С ростом нагрузки на валу двигателя увеличиваются также и потери , поэтому потребляемая мощность растет быстрее полезной мощности и график имеет несколько криволинейный вид.
Рис. 22.5 U-образные характеристики синхронного двигателя
Рис. 22.6. Рабочие характеристики синхронного двигателя
Вид графика зависит от вида настройки тока возбуждения: если в режиме х. х. ток возбуждения установлен таким, что = 1, то с ростом нагрузки коэффициент мощности снижается, если же установить =1 при номинальной нагрузке, то при недогрузке двигатель будет забирать из сети реактивный опережающий ток, а при перегрузке — отстающий. Обычно устанавливают ток возбуждения таким, чтобы =1 при средней нагрузке (рис. 22.). В этом случае коэффициент мощности во всем диапазоне нагрузок остается достаточно высоким. Если же установить ток в обмотке возбуждения синхронного двигателя таким, чтобы =1 был при нагрузке несколько превышающей номинальную, то при номинальной нагрузке и двигатель будет потреблять из сети опережающий по отношению к напряжению сети ток, что приведет к повышению коэффициента мощности этой сети. В этом отношении синхронные двигатели выгодно отличаются от асинхронных, работающих с отстающим по фазе током (особенно при недогрузке двигателя) и снижающих энергетические показатели питающей сети.
Ток в обмотке статора двигателя . Из этого выражения видно, что ток с увеличением нагрузки на валу двигателя растет быстрее, чем потребляемая мощность , вследствие уменьшения .
Так как ротор синхронного двигателя вращается в ту же сторону, что и поле статора, то направление вращения ротора определяется порядком следования фаз линейных проводов, подведенных к обмотке статора, и порядком расположения фаз обмотки статора. Для изменения направления вращения трехфазного синхронного двигателя необходимо переключить два линейных привода, подведенных из сети к выводам обмотки статора (см. § 9.3).
В заключение необходимо отметить, что синхронные двигатели по сравнению с асинхронными имеют преимущество, заключающееся в том, что они могут работать с = 1, не создавая в щей сети индуктивных токов, вызывающих дополнительные потери энергии. Более того, при работе с перевозбуждением синхронные двигатели создают в сети емкостный ток, чем способствуют повышению коэффициента мощности энергосистемы в целом. Другое достоинство синхронных двигателей состоит в том, что, как это следует из (21.11), основная составляющая электромагнитного момента пропорциональна напряжению сети , а у асинхронных двигателей электромагнитный момент пропорционален [см. (13.14)]. По этой причине при понижении напряжения в сети синхронные двигатели сохраняют большую перегрузочную способность, чем асинхронные.
К недостаткам синхронных двигателей относятся их более сложная конструкция и повышенная стоимость по сравнению с асинхронными двигателями с короткозамкнутым ротором. Кроме того, для работы синхронного двигателя требуется устройство для питания постоянным током обмотки возбуждения.
Опыт эксплуатации показал, что применение синхронных двигателей общего назначения наиболее целесообразно при мощности 200 кВт и более в установках, не требующих частых пусков и регулирования частоты вращения (мощные насосы, вентиляторы, компрессоры и т. п.).
Синхронный компенсатор (СК) представляет собой синхронную машину, предназначенную для генерирования реактивной мощности. Синхронный компенсатор включают в электрическую систему с целью повышения ее коэффициента мощности.
Принцип происходящих при этом явлений состоит в том, что необходимую для работы некоторых потребителей реактивную мощность вырабатывает не синхронный генератор, установленный на электростанции, а синхронный компенсатор, установленный в непосредственной близости к потребителю. К числу потребителей переменного тока, требующих значительной реактивной мощности, в первую очередь относятся асинхронные двигатели. На рис. 22.7 показана система, состоящая из синхронного генератора (СГ), повышающего ТрI и понижающего ТрII трансформаторов, линии электропередачи (ЛЭП), потребителя Z и синхронного компенсатора (СК), включенного непосредственно на входе потребителя. Синхронный компенсатор, включенный в сеть, работает как синхронный двигатель без нагрузки , т. е. в режиме х. х., и при вырабатывает реактивную мощность , необходимую для работы потребителя Z, например группы асинхронных двигателей. Благодаря этому реактивная мощность в СГ и ЛЭП доведена до некоторого минимального значения . Это способствует повышению технико-экономических показателей всей электрической системы.
Рис. 22.7. Схема включения синхронного компенсатора (СК) в электрическую систему
Рис. 22.8. Применение синхронного компенсатора для повышения коэффициента мощности сети
Для пояснения явлений, связанных с подключением СК к электрической системе, рассмотрим рис. 22.8. При подключении потребителя Z к сети с напряжением (рис. 22.8, ) в сети возникает ток , отстающий по фазе от напряжения на угол , обусловленный значительной индуктивной составляющей тока . При подключении СК параллельно потребителю Z и создании в СК режима перевозбуждения (рис. 22.8, ) в сети появится ток , опережающий по фазе напряжение на угол 90°. Результирующий ток в сети
Фазовый сдвиг этого тока относительно напряжения сети (угол ) намного меньше угла фазового сдвига до включения СК (угол ). Кроме того, ток станет меньше . В этом можно убедиться исходя из следующих соображений. Так как СК работает без нагрузки на валу, то его активная мощность не велика и определяется потерями х.х. в компенсаторе. Пренебрегая этими потерями, можно активную мощность в сети до подключения СК
приравнять к активной мощности сети после подключения СК:
Но так как , а , то . В результате синхронный генератор и линия электропередачи разгружаются, и потери мощности в них уменьшаются.
В некоторых случаях СК работают с недовозбуждением. Необходимость в этом возникает, если ток в системе содержит значительную емкостную составляющую, которая не компенсируется индуктивной составляющей тока потребителей. Обычно степень возбуждения СК регулируют посредством автоматических устройств.
Синхронные компенсаторы применяют также для стабилизации напряжения в сети при передаче энергии по линиям большой протяженности. При больших индуктивных нагрузках напряжение в конце линии (у потребителей) оказывается намного меньше, чем в начале; при малых нагрузках, наоборот, под влиянием емкостных сопротивлений линии напряжение в конце линии может даже повышаться по сравнению с напряжением в начале. Если же в конце линии (у потребителей) включить СК, работающий при больших нагрузках с перевозбуждением и при малых нагрузках с недовозбуждением, то это позволит поддерживать напряжение в конце линии практически неизменным.
Условия нагревания СК при опережающем токе (при перевозбуждении) более тяжелые, чем при отстающем (при недовозбуждении), поэтому номинальной мощностью компенсатора считают мощность при перевозбуждении.
Пример 22.1. Потребитель, включенный в сеть переменного тока напряжением = 6,3 кВ, потребляет мощность 1500 кВ·А при коэффициенте мощности = 0,7 . Определить мощность синхронного компенсатора, необходимого для повышения коэффициента мощности в сети до = 0,95 ( = 0,31). Определить также силу тока нагрузки в сети до и после компенсации.
Решение. До включения СК реактивная мощность сети кВ•Ар, ток нагрузки в сети
активная составляющая этого тока А.
После включения СК реактивная мощность уменьшилась до
Таким образом, для повышения коэффициента мощности установки от = 0,7 до = 0,95 требуется включить СК мощностью
При этом активная составляющая тока сети не изменится ( = 97 А), а реактивная составляющая этого тока станет равной
Следовательно, ток в сети после включения СК
Обычно коэффициент мощности увеличивают до 0,92—0,95, так как экономия, получаемая от повышения коэффициента мощности до единицы, не оправдывает увеличивающихся расходов, обусловленных возросшей мощностью синхронного компенсатора. Так, если в рассматриваемом примере потребовалось бы увеличить коэффициент мощности в сети до единицы, то пришлось бы применить синхронный компенсатор мощностью 1050 кВ•Ар, т. е. почти в два раза больше, чем при = 0,95.
Синхронные компенсаторы — это электрические машины большой мощности: от 10 до 160 тыс. кВ•А. Выполняют их обычно с горизонтальным расположением вала на напряжение от 6,6 до 16 кВ, частотой 50 Гц. Число полюсов в СК обычно составляет = 6 и 8, что соответствует частоте вращения ротора 1000 и 750 об/мин. В синхронных компенсаторах современных серий применен асинхронный пуск, поэтому ротор СК снабжен пусковой клеткой. синхронный двигатель компенсатор статор
Вал компенсатора не передает вращающего момента, и поэтому при его расчете учитывают лишь силу тяжести ротора и силу магнитного притяжения. В итоге вал СК по сравнению с валом синхронного двигателя имеет уменьшенное сечение. Это способствует уменьшению габаритов и облегчению СК. Так как вал СК не имеет выступающего конца, то СК сравнительно легко герметизировать с целью применения в нем водородного охлаждения (см. § 19.3).
Наиболее важными характеристиками СК являются U-образные характеристики, определяющие основные параметры компенсатора: значения токов в обмотке статора и в обмотке возбуждения. В принципе эти характеристики не отличаются от U-образной характеристики синхронного двигателя в режиме х.х. (= 0). Указанные характеристики строят для разных напряжений сети.
Синхронный компенсатор не несет активной нагрузки (его электромагнитная мощность ) и работает при значении угла , что обеспечивает СК большую перегрузочную способность.
1. Чем ограничивается область устойчивой работы синхронного двигателя?
2. Объясните процесс пуска синхронного двигателя?
3. Как регулируется коэффициент мощности синхронного двигателя?
4. Каково назначение синхронного компенсатора?
5. Каковы достоинства и недостатки синхронных двигателей по сравнению с асинхронными?
Размещено на Allbest.ru
Подобные документы
Защита синхронных компенсаторов
Пуск синхронного компенсатора, представляющей собой синхронный двигатель облегчённой конструкции, предназначенный для работы на холостом ходу. Защита от замыканий на землю в одной точке цепи возбуждения компенсатора. Схема защиты минимального напряжения.
Асинхронные машины
Устройство асинхронной машины: статор и вращающийся ротор. Механическая характеристика асинхронного двигателя, его постоянные и переменные потери. Методы регулирования частоты вращения двигателя. Работа синхронного генератора в автономном режиме.
Синхронный вертикальный двигатель типа ВДС 375/64-24
Принцип действия вертикального синхронного двигателя. Конструкция крестовин и вала. Расчет сердечника статора. Синтез и оптимизация электромагнитного ядра на персональном компьютере. Оценка резервов мощности серии вертикальных синхронных двигателей.
Расчет синхронного двигателя
Расчет и обоснование номинальной величины асинхронного двигателя. Размеры и зубцовая зона статора. Воздушный зазор и полюса ротора. Определение основных паромеров магнитной цепи. Превышение температуры обмотки статора. Характеристики синхронной машины.
Вертикальный синхронный двигатель типа ВДС 325/40-16 мощностью 5500 кВт
Назначение, описание конструкции и системы возбуждения вертикального синхронного двигателя. Конструкция корпуса, сердечника и обмотки статора, ротора, крестовин и вала, системы возбуждения. Расчет электромагнитного ядра и его оптимизация на ЭВМ.
Исследование трехфазного синхронного генератора, включенного на параллельную работу с сетью
Конструкция синхронного генератора и приводного двигателя. Приведение генератора в состояние синхронизации. Способ точной синхронизации. Процесс синхронизации генераторов с применением лампового синхроноскопа. Порядок следования фаз генератора.
Модель синхронного генератора в фазных координатах
Общие понятия и определения в математическом моделировании. Основные допущения при составлении математической модели синхронного генератора. Математическая модель синхронного генератора в фазных координатах. Реализация модели синхронного генератора.
Обеспечение безопасной работы синхронного генератора с сетью
Параллельная работа синхронного генератора с сетью, регулирование его активной и реактивной мощности. Построение векторных диаграмм при различных режимах нагрузки. Схема подключения синхронного генератора к сети с помощью лампового синхроноскопа.
Синхронный генератор
Расчет параметров синхронного генератора. Магнитная цепь двигателя. Размеры, конфигурация, материал. Обмотка статора и демпферная обмотка. Расчет магнитной цепи. Активное и индуктивное сопротивление обмотки для установившегося режима. Потери и КПД.
Математическая модель асинхронного двигателя
Паспортные данные асинхронного двигателя. Моделирование схемы в пакете SkyLab. Переходные процессы фазного тока и угловой скорости при пуске двигателя. Переходные процессы электромагнитного момента и угловой скорости. Динамическая пусковая характеристика.
Исследование трехфазного синхронного генератора
Устройство синхронного генератора, экспериментальное подтверждение теоретических сведений о его свойствах. Сбор схемы генератора, пробный пуск и проверка возможности регулирования параметров. Анализ результатов эксперимента, составление отчета.
Динамическое торможение асинхронного двигателя с короткозамкнутым ротором
Режим электромагнитного тормоза асинхронного двигателя с короткозамкнутым ротором (противовключение): механические характеристики режима динамического торможения, принципа действия схемы торможения АД : порядок ее работы и назначение органов управления.
Электрические машины переменного тока
Простота устройства, большая надежность и низкая стоимость асинхронных двигателей. Принцип действия асинхронной машины и режимы ее работы. Получения вращающегося магнитного поля. Устройство синхронной машины, холостой ход синхронного генератора.
Обслуживание и ремонт электрических двигателей (ремонт синхронного двигателя)
Общие понятия и определение электрических машин. Основные типы и классификация электрических машин. Общая характеристика синхронного электрического двигателя и его назначение. Особенности испытаний синхронных двигателей. Ремонт синхронных двигателей.
Расчет асинхронного двигателя с короткозамкнутым ротором
Размеры, конфигурация, материал магнитной цепи трехфазного асинхронного двигателя с короткозамкнутым ротором. Обмотка статора с трапецеидальными полузакрытыми пазами. Тепловой и вентиляционный расчеты, расчет массы и динамического момента инерции.
Назначение системы автоматического регулирования (САР) и требования к ней. Математическая модель САР напряжения синхронного генератора, передаточные функции разомкнутой и замкнутой системы. Определение предельного коэффициента усиления системы.
Асинхронные электродвигатели, способы измерения скорости и момента
Принцип работы и устройство асинхронного двигателя. Способ измерения электромагнитного момента асинхронного двигателя. Регулирование частоты вращения асинхронных двигателей. Изменение скольжения, числа пар полюсов, частоты источника питания двигателя.
Проектирование электрических машин
Расчет обмотки статора, демпферной обмотки, магнитной цепи. Характеристика холостого хода. Векторная диаграмма для номинальной нагрузки. Индуктивное и активное сопротивление рассеяния пусковой обмотки. Характеристики синхронного двигателя машины.
Короткое замыкание в цепи синхронного генератора
Установившийся режим трехфазного короткого замыкания синхронного генератора. Физические явления при внезапном трехфазном коротком замыкании в цепи синхронного генератора без автоматического регулятора напряжения. Процессы изменения магнитных потоков.
Моделирование асинхронного двигателя
Угловая скорость вращения магнитного поля. Математическая модель асинхронного двигателя в форме Коши, а также блок-схема его прямого пуска с использованием Power System Blockset. Зависимость угловой скорости ротора от величины электромагнитного момента.

- главная
- рубрики
- по алфавиту
- вернуться в начало страницы
- вернуться к началу текста
- вернуться к подобным работам
- весь список подобных работ
- скачать работу можно здесь
- сколько стоит заказать работу?
Работы в архивах красиво оформлены согласно требованиям ВУЗов и содержат рисунки, диаграммы, формулы и т.д.
PPT, PPTX и PDF-файлы представлены только в архивах.
Рекомендуем скачать работу.
§ 22.4. Синхронный компенсатор
Синхронный компенсатор (СК) представляет собой синхронную машину, предназначенную для генерирования реактивной мощности. Синхронный компенсатор включают в электрическую систему с целью повышения ее коэффициента мощности.
Принцип происходящих при этом явлений состоит в том, что необходимую для работы некоторых потребителей реактивную мощность вырабатывает не синхронный генератор, установленный на электростанции, а синхронный компенсатор, установленный в непосредственной близости к потребителю. К числу потребителей переменного тока, требующих значительной реактивной мощности, в первую очередь относятся асинхронные двигатели. На рис. 22.7 показана система, состоящая из синхронного генератора (СГ), повышающего ТрI и понижающего ТрII трансформаторов, линии электропередачи (ЛЭП), потребителя Z и синхронного компенсатора (СК), включенного непосредственно на входе потребителя. Синхронный компенсатор, включенный в сеть, работает как синхронный двигатель без нагрузки , т. е. в режиме х. х., и при вырабатывает реактивную мощность , необходимую для работы потребителя Z, например группы асинхронных двигателей. Благодаря этому реактивная мощность в СГ и ЛЭП доведена до некоторого минимального значения . Это способствует повышению технико-экономических показателей всей электрической системы.
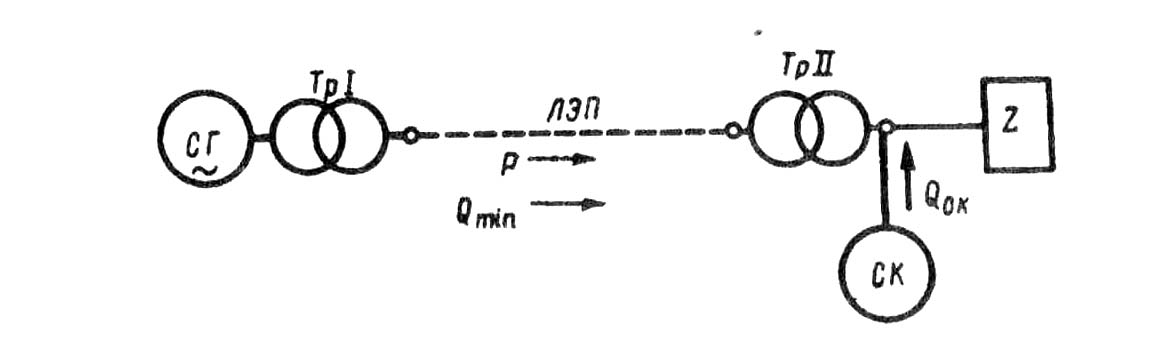
Рис. 22.7. Схема включения синхронного
компенсатора (СК) в электрическую систему
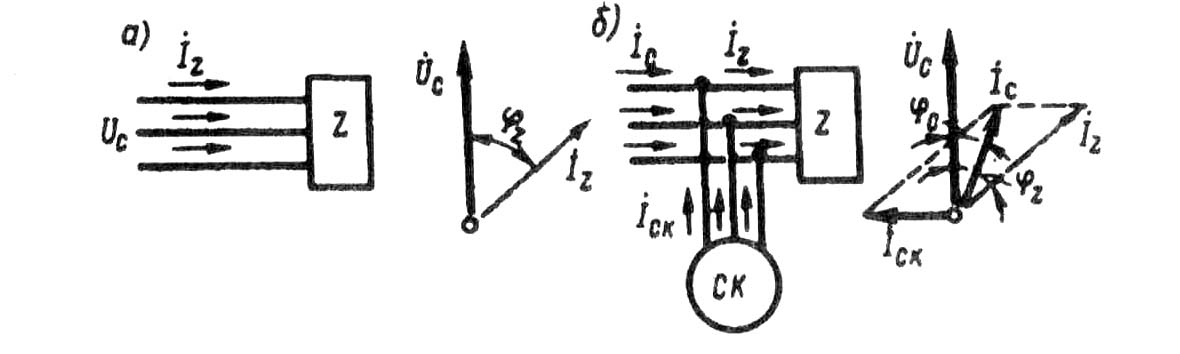
Рис. 22.8. Применение синхронного компенсатора для повышения коэффициента мощности сети
Для пояснения явлений, связанных с подключением СК к электрической системе, рассмотрим рис. 22.8. При подключении потребителя Z к сети с напряжением (рис. 22.8, ) в сети возникает ток , отстающий по фазе от напряжения на угол , обусловленный значительной индуктивной составляющей тока . При подключении СК параллельно потребителю Z и создании в СК режима перевозбуждения (рис. 22.8, ) в сети появится ток , опережающий по фазе напряжение на угол 90°. Результирующий ток в сети
Фазовый сдвиг этого тока относительно напряжения сети (угол ) намного меньше угла фазового сдвига до включения СК (угол ). Кроме того, ток станет меньше . В этом можно убедиться исходя из следующих соображений. Так как СК работает без нагрузки на валу, то его активная мощность не велика и определяется потерями х.х. в компенсаторе. Пренебрегая этими потерями, можно активную мощность в сети до подключения СК
приравнять к активной мощности сети после подключения СК:
Но так как , а , то . В результате синхронный генератор и линия электропередачи разгружаются, и потери мощности в них уменьшаются.
В некоторых случаях СК работают с недовозбуждением. Необходимость в этом возникает, если ток в системе содержит значительную емкостную составляющую, которая не компенсируется индуктивной составляющей тока потребителей. Обычно степень возбуждения СК регулируют посредством автоматических устройств.
Синхронные компенсаторы применяют также для стабилизации напряжения в сети при передаче энергии по линиям большой протяженности. При больших индуктивных нагрузках напряжение в конце линии (у потребителей) оказывается намного меньше, чем в начале; при малых нагрузках, наоборот, под влиянием емкостных сопротивлений линии напряжение в конце линии может даже повышаться по сравнению с напряжением в начале. Если же в конце линии (у потребителей) включить СК, работающий при больших нагрузках с перевозбуждением и при малых нагрузках с недовозбуждением, то это позволит поддерживать напряжение в конце линии практически неизменным.
Условия нагревания СК при опережающем токе (при перевозбуждении) более тяжелые, чем при отстающем (при недовозбуждении), поэтому номинальной мощностью компенсатора считают мощность при перевозбуждении.
Пример 22.1. Потребитель, включенный в сеть переменного тока напряжением = 6,3 кВ, потребляет мощность 1500 кВ·А при коэффициенте мощности = 0,7 . Определить мощность синхронного компенсатора, необходимого для повышения коэффициента мощности в сети до = 0,95 ( = 0,31). Определить также силу тока нагрузки в сети до и после компенсации.
Решение. До включения СК реактивная мощность сети кВ∙Ар, ток нагрузки в сети
активная составляющая этого тока А.
После включения СК реактивная мощность уменьшилась до
Таким образом, для повышения коэффициента мощности установки от = 0,7 до = 0,95 требуется включить СК мощностью
При этом активная составляющая тока сети не изменится ( = 97 А), а реактивная составляющая этого тока станет равной
Следовательно, ток в сети после включения СК
Обычно коэффициент мощности увеличивают до 0,92—0,95, так как экономия, получаемая от повышения коэффициента мощности до единицы, не оправдывает увеличивающихся расходов, обусловленных возросшей мощностью синхронного компенсатора. Так, если в рассматриваемом примере потребовалось бы увеличить коэффициент мощности в сети до единицы, то пришлось бы применить синхронный компенсатор мощностью 1050 кВ∙Ар, т. е. почти в два раза больше, чем при = 0,95.
Синхронные компенсаторы — это электрические машины большой мощности: от 10 до 160 тыс. кВ∙А. Выполняют их обычно с горизонтальным расположением вала на напряжение от 6,6 до 16 кВ, частотой 50 Гц. Число полюсов в СК обычно составляет = 6 и 8, что соответствует частоте вращения ротора 1000 и 750 об/мин. В синхронных компенсаторах современных серий применен асинхронный пуск, поэтому ротор СК снабжен пусковой клеткой.
Вал компенсатора не передает вращающего момента, и поэтому при его расчете учитывают лишь силу тяжести ротора и силу магнитного притяжения. В итоге вал СК по сравнению с валом синхронного двигателя имеет уменьшенное сечение. Это способствует уменьшению габаритов и облегчению СК. Так как вал СК не имеет выступающего конца, то СК сравнительно легко герметизировать с целью применения в нем водородного охлаждения (см. § 19.3).
Наиболее важными характеристиками СК являются U-образные характеристики, определяющие основные параметры компенсатора: значения токов в обмотке статора и в обмотке возбуждения. В принципе эти характеристики не отличаются от U-образной характеристики синхронного двигателя в режиме х.х. ( = 0). Указанные характеристики строят для разных напряжений сети.
Синхронный компенсатор не несет активной нагрузки (его электромагнитная мощность ) и работает при значении угла , что обеспечивает СК большую перегрузочную способность.
Контрольные вопросы.
1. Чем ограничивается область устойчивой работы синхронного двигателя?
2. Объясните процесс пуска синхронного двигателя?
3. Как регулируется коэффициент мощности синхронного двигателя?
4. Каково назначение синхронного компенсатора?
5. Каковы достоинства и недостатки синхронных двигателей по сравнению с асинхронными?
Чем ограничивается область устойчивой работы синхронного двигателя
ВЕРСИЯ ДЛЯ СЛАБОВИДЯЩИХ 
Министерство просвещения
Российской Федерации 
Министерство образования и науки Республики Башкортостан
Адрес: 450077, РБ, г.Уфа,
ул. Театральная, 5/2
тел.: +7(347)218-03-15
Министерство науки и высшего образования
Российской Федерации

Государственное автономное профессиональное образовательное учреждение
Нефтекамский нефтяной колледж
452680, Республика Башкортостан,
г.Нефтекамск, ул.Дорожная, 45
Телефоны:
Приемная: (34783) 4-49-72
Гл.бухгалтер: (34783) 4-96-83
Заведующая: (34783) 4-49-78
Учебная часть: (34783) 4-50-83
Отдел кадров: (34783) 4-68-86







По вопросам получения среднего профессионального образовагия инвалидам и лицами с ОВЗ
+7(495114-55-02 (добавочный 1)
По вопросам мониторинга занятости выпускников СПО
+7(495114-55-02 (добавочный 2)
По вопросам функционирования центров опережающей профессиональной подготовки
+7(495114-55-02 (добавочный 3)
По вопросам создания и функционирования современных мастерских
+7(495114-55-02 (добавочный 4)
По вопросам реализации федерального проекта «Профессионалитет
+7(495114-55-02 (добавочный 5)
По вопросам государственной поддержки создания образовательно-производственных центров (кластеров
+7(495114-55-02 (добавочный 6)
По общим вопросам среднего профессионального образования
+7(495114-55-02 (добавочный 7)