Камера от смартфона и ардуино

Помогите ,пожалуйста. Достал из нерабочего телефона камеру. Хочу использовать. Но не знаю как. В интернете решения не нашел.
Лучшие ответы ( 1 )
94731 / 64177 / 26122
Регистрация: 12.04.2006
Сообщений: 116,782
Ответы с готовыми решениями:
STM32 + камера от смартфона
День добрый. Очень хочется "прикрутить" камеру от мобильника к контроллеру. Например вот.
Камера смартфона не запускается
делаю приложение под андроид. Не идет видео с камеры — На компьютере с веб камеры все норм. Когда.
Скрытая камера питается от смартфона
Очень нужна консультация, если не помощь. Если скрытая камера питается от телефона, когда телефон.
Повредилась камера смартфона Sony
Добрый вечер, дорогие форумчане! Пожалуйста, подскажите, что это может быть: у меня смартфон Sony.
Выбор смартфона, в приоритете камера и заряд батареи
Здравствуйте, нужен совет в выборе смартфона. В приоритете камера и заряд батареи, андроид. Какие.
Тутошний я
2146 / 1201 / 225
Регистрация: 03.11.2009
Сообщений: 4,416
Записей в блоге: 2

Сообщение было отмечено spyteamalex как решение
Решение
Ищеш схему от своего телефона. Стоб узнать распиновку камеры.
Ищеш по какому протоколу работает.
Ну ещё можно выкинуть камеру и не мучаться.
87844 / 49110 / 22898
Регистрация: 17.06.2006
Сообщений: 92,604
Помогаю со студенческими работами здесь
Как проверить реле к ардуино без ардуино
Собственно вопрос в названии. Дело в том что реле пришло по почте раньше чем само ардуино. Так как.
Аналоговая камера, плата видеозахвата, веб камера
Товарищи эксперты, прошу вашей помощи в решении стоящей передо мной задачи. Требуется подключить.
Не работает камера в приложении «Камера» 0*a00f4244
Здравствуйте. Выдает ошибку 0*a00f4244 и "Не удается найти камеру". Но в сторонней программе — без.
9 ШД с ардуино
Добрый вечер, есть проект, я по механике, человек что по электронике отмораживается, а надо делать.
Или воспользуйтесь поиском по форуму:
Запускаем камеру от телефона, или что делать, когда ничего не получается?
Лет восемь назад работал я в одном… а в прочем, не важно где. Делали мы там всякие разные интересные вещи. В том числе занимались системами технического зрения для роботов. Роботы были немного маленькие. И если привод для них маленький сделать не было для нас особой проблемой, то вот сделать миниатюрную цифровую камеру, которая не была бы размером с половину робота, было трудно (когда же мы наконец похороним PAL в таких разработках и везде будет цифра?). Если вам любопытно узнать, чем же всё закончилось, прошу под кат!
Небольшой дисклеймер. С описываемых событий прошло уже достаточно лет, результаты работы не представляют никакого коммерческого интереса ( ведь так, товарищ майор? ), поскольку повторить полностью сейчас всё это невозможно из-за устаревания элементной базы, теперь можно рассказать, как молодой инженер искал решение проблемы и к чему всё это привело.
Изначально у нас был микропроцессор PXA300, в который втыкался SoC, от тогда еще Aptina, типа MT9D131 (JPEG сразу на параллельном выходе), но всё это потребляло много, а смысла в таком монстре было мало.
Проблема звучала просто – робот привязан к компьютеру проводом на 100 мегабит. Оператор должен видеть цветную картинку хотя бы 640х480 в целых 15 FPS. Ставить в него камеру, которая гонит параллельный поток в XScale, в котором потом происходит тупое складывание картинки в буфер и передача кадра по сети, показалось слишком расточительным (ну серьезно, целый линукс на борту только чтобы перекладывать байты из одного интерфейса в другой?). Особенно учитывая целевое разрешение камеры. Нужно было решение проще. Плюс существенные ограничения по габаритам не позволяли поставить даже самый маленький объектив типа М12, он был просто конских размеров вместе с держателем.
Поскольку к описываемому моменту я достаточно поднаторел в разработке систем миниатюрных приводов, необходимость заниматься какой-то камерой немного удручала. Но в то же время неизведанное интриговало. В любом случае, хотелось научиться чему-то новому, особенно учитывая то, что мои предшественники путь, описанный ниже, так и не осилили (правда, тут мог сыграть фактор времени, они занимались этой разработкой парой лет раньше).
В результате творческого поиска меня заинтересовали камеры мобильных телефонов, которые были модульными, стоили как блохи (это выяснилось уже позднее) и теоретически закрывали все наши хотелки. Вопрос был только в том, как такую камеру подключить и получить с неё картинку. Я начал с изучения доступных на рынке мобильных телефонов и конкретно того, какие параметры обеспечивают камеры в них. Сразу стало понятно, что принципиально есть два типа таких камер – модули с линзами с гибко-жесткой частью, которые заточены под конкретный конструктив телефона:
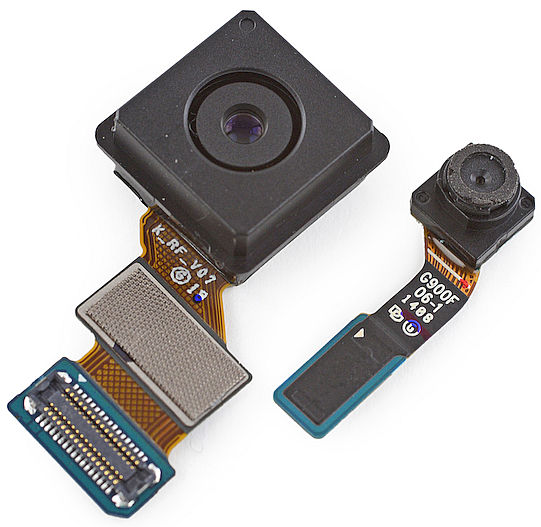
,
и модули, вставляющиеся в так называемые кроватки, которые выглядели наиболее перспективно:

реальный модуль,

кроватки на любой вкус.
Также удалось узнать, что есть такая штука как SMIA . Довольно быстро я нашел всю утекшую в сеть документацию на стандарт и стал его изучать. Оказалось, что есть три типоразмера модулей:
| Name | Length | Width | Height Option 1 | Height Option 2 |
|---|---|---|---|---|
| SMIA65 | 6.5 mm | 6.5 mm | 4.6 mm | 5.8 mm |
| SMIA85 | 8.5 mm | 8.5 mm | 6.1 mm | 7.1 mm |
| SMIA95 | 9.5 mm | 9.5 mm | 7.6 mm | 8.6 mm |
и по конструктиву нам подходит самый маленький – SMIA65.
Поиск нормальных брендовых камер ни к чему адекватному не привел. Искать такую дичь у китайцев я еще не умел, а нормальные европейцы типа ST хоть и заявляли о том, что производят подобные модули (и даже документацию на которые можно было скачать без регистрации и смс), продавать свободно заинтересованной публике не желали. Обращение в наше представительство ST не помогло, и пришлось продолжать копать.
Слава ремонтникам мобильников! Схемы, платы, фотки! У них есть всё. После изучения документации и сопоставления доступных для покупки телефонов и запчастей выбор пал на камеру от Nokia 5250.

Сферическая нокия в вакууме.
Симбиан, все дела. Я даже качал торрентом какие-то дикие исходники этой чудесной операционки, в попытке найти готовый драйвер для камеры. Но, увы, тогда моих способностей на это не хватило. Опять пришлось копать глубже.
Ох, какой же наивный я был. Это сейчас, пройдя весь путь от и до, я понимаю, что можно было существенно сократить время разработки, заказывая нормальные платы на нормальном производстве (правда, с оплатой тогда потенциально были некоторые проблемы, а ручки чесались сделать здесь и сейчас). Когда там появился JLCPCB или PCBWay? А тогда только ЛУТ на фольге, хлорное железо и два дня на всё про всё.
Signal Integrity? Вы делали гигабитные дифпары на двустороннем миллиметровом текстолите из платана лутом? А я делал. Даже импеданс считал.
0.5\0.2.
Ничо, работало (к сожалению, доступа к осциллографу, которым можно было бы посмотреть глазок, у меня не было). Сделал несколько тестовых плат. Намучился с пайкой.
Экспериментировал с паяльной маской, даже сделал несколько плат. Одну успешно запорол, пропаяв её при помощи флюса ТАГС (ха-ха, какая ирония. Сейчас на сайте чипдипа написано про остаточное сопротивление. Эх, эту бы надпись тогда). На той плате ничего нормально не работало, даже источники питания. Между дорожками, которые ну никак не могли быть связаны, всегда присутствовало от десятков до сотен килоом.
Причем плату после пайки мыл в семи водах. Поначалу я думал, что что-то успешно спалил. Начал отпаивать источники питания и всякую обвязку. Замыкания не проходили. Кончилось всё тем, что отпаял с платы вообще всё. Замыкания остались. Сделал вывод, что дело во флюсе, который затёк под маску и не вымылся вообще ничем. После этого я перестал делать платы с маской сам и паять их с флюсом ТАГС.
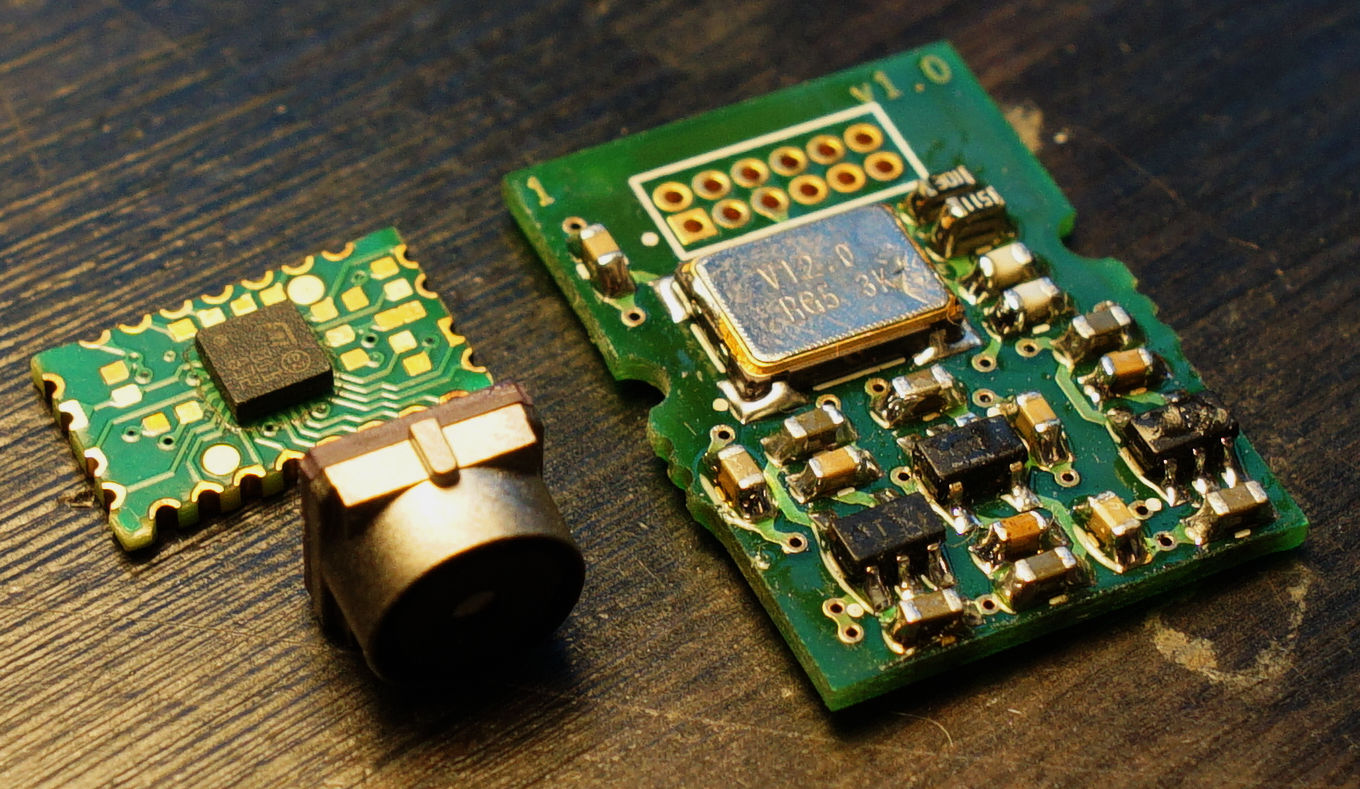
Но камера — это еще полбеды. Надо же было чем-то принимать последовательный сигнал и разворачивать его в параллельный, чтобы запихнуть в STM32F217 (BlackFin? Не, не слышали. К моменту описываемых событий я прочно состоял в секте стм-оводов и конфигурил клоки через только появившийся экселевский файлик (кубоводы, привет!)). Да-да, четырехсотых стм-ок тогда еще не было (хорошо, хорошо, они только появились), и я успешно использовал кит от стартеркита на двухсотой серии. Опять же в результате длительного поиска и изучения рынка оказалось, что пути ровно два. Либо брать лэттисовскую плисину, для которой был апноут по преобразованию CSI в PCAM (так и не нашел его из 2012 года у себя в архиве, но точно помню, что был такой), либо покупать STSMIA832 (забавно, ST выпилили свою доку на преобразователь с сайта. У них теперь можно только апноутом разжиться.) и учиться паять BGA. Поскольку пайка была мне ближе и знакомство с потрохами плисов не входило в планы, да и сроки откровенно поджимали, я обзавелся несколькими микросхемами и купил готовые переходники с TFBGA25 в DIP (и да, макет был собран на беспаечной макетке и даже как-то работал).
Собственно, схема десериализатора совершенно банальна (не переживайте, ГОСТом тут и не пахнет, с тех пор я научился рисовать схемы посимпатичнее).

Схема, да.
Видите красные площадки? Это площадки подключения переходника из TFBGA25 в DIP.
Плата.
Но вернемся к камере. Чем прекрасна SMIA? Да тем, что поначалу казалось, что всё просто.
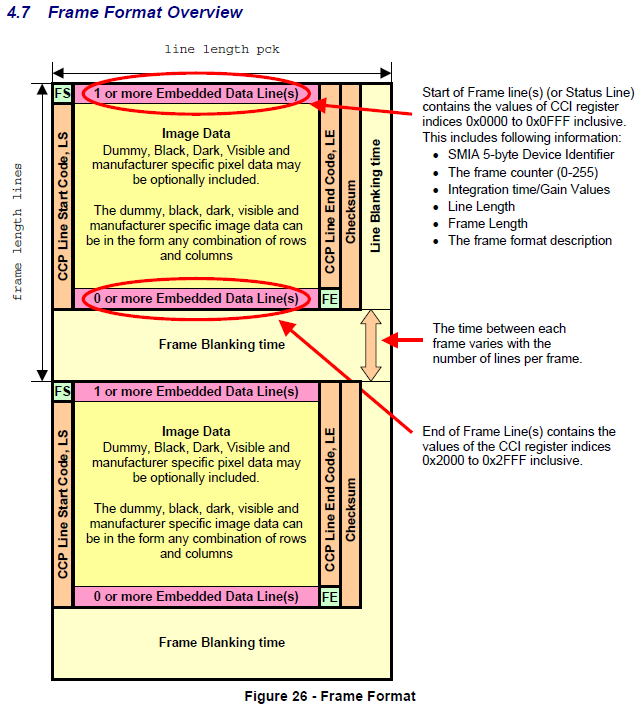
Красота же?
Все регистры модулей описаны, как выбрать внутреннюю цепочку тактирования, со всеми необходимыми пре- и постскейлерами, тоже описано.
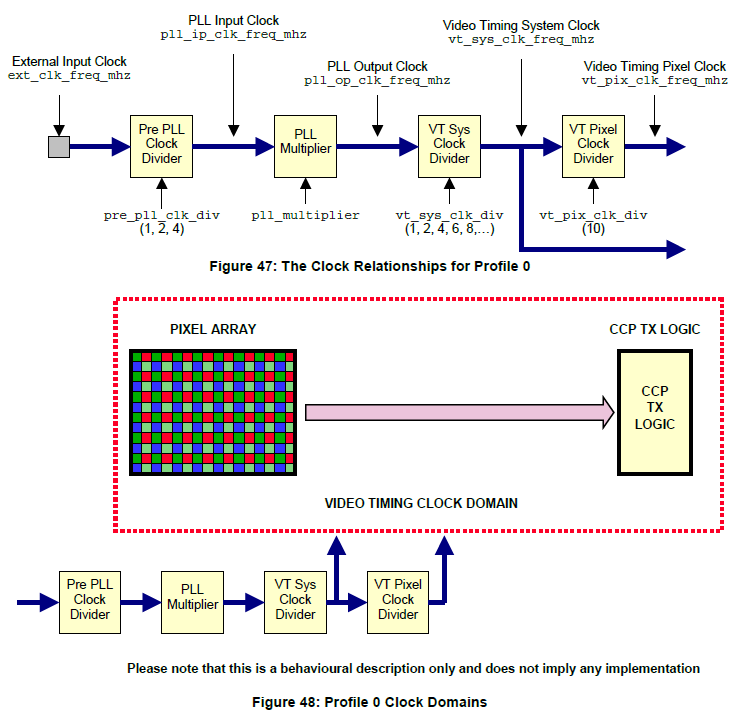
Такие подробности да в каждый документ бы!
Пока я занимался всем этим, SMIA_Functional_specification_1.0.pdf стал моей настольной брошюркой, зачитанной до дыр.
Но, чу, колченогое подобие драйвера (ах, какое громкое слово для заголовочного файла с несколькими функциями записи-чтения регистров камеры) написано, а в память микроконтроллера почему-то никакие байтики не падают. Хотя модуль через I2C успешно читается и записывается. О, сколько раз я думал, что неправильно сконфигурировал клоки или пропустил какую-то команду. Результата не было. Тогда я подумал, что хватит биться головой об стенку, надо делать что-то адекватное тому тупику, в который я угодил. Откуда я взял камеру? Правильно, из телефона. Телефон умеет показывать видео и делать фотографии с модуля? Умеет. Значит нужно тело на опыты. Драматичная нет история покупки донора для опытов лежит здесь.
Как бы там ни было, самым сложным было подпаяться к клоку и данным с модуля.

Ножки у кроватки под стенками, понимаешь.
Дальше было дело техники – снять дамп обмена процессора телефона с камерой и рассмотреть в деталях, что же происходит. В результате некоторых пертурбаций был получен вот такой лог обмена.
Вы тоже заметили строки с вопросиками, которыми я пометил запись непонятно чего непонятно куда (пакеты 45-50)? Эти странные регистры, не описанные в, казалось, незыблемой документации (кто ж знал, что в Manufacturer Specific Registers — [0x3000 – 0x3FFF] тоже надо что-то писать). Ну а дальше всё было очевидно. Пишем это непонятно что в не понятно куда и вуа-ля!

first_picture_ever.png
К сожалению не помню, есть ли тут дебайеризация (хм, J = demosaic(I,’grbg’); подсказывает, что есть) и если есть, то всё ли сделано правильно. Как и на втором кадре:

Камера лежала на боку.
Если повернуть голову набок, то можно прочитать 95% чего-то, рассмотреть рёбра какого-то радиатора, лежавшего на столе, и даже попытаться прочитать пароли на листочках с магнитной доски.
Почему всё такое зеленое? А пёс его знает. Этим вопросом уже занимался нормальный адекватный программист (Миша, привет!), который прикручивал эту систему к LwIP и проклинал меня за маленький объем SRAM и малую скорость 217-го (120МГц всего), который еле успевал перекладывать байты. По его словам, надо было просто правильно выставить усиление цветов каналов.
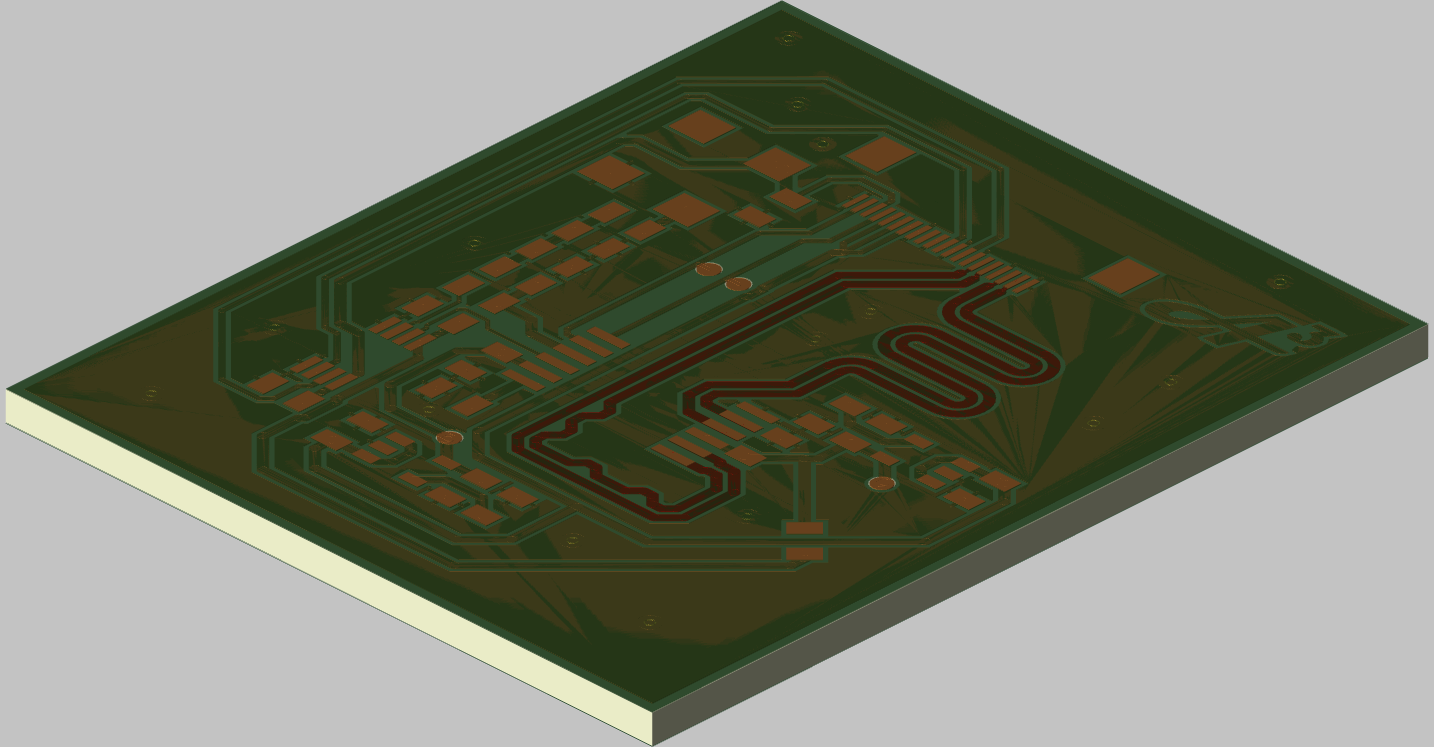
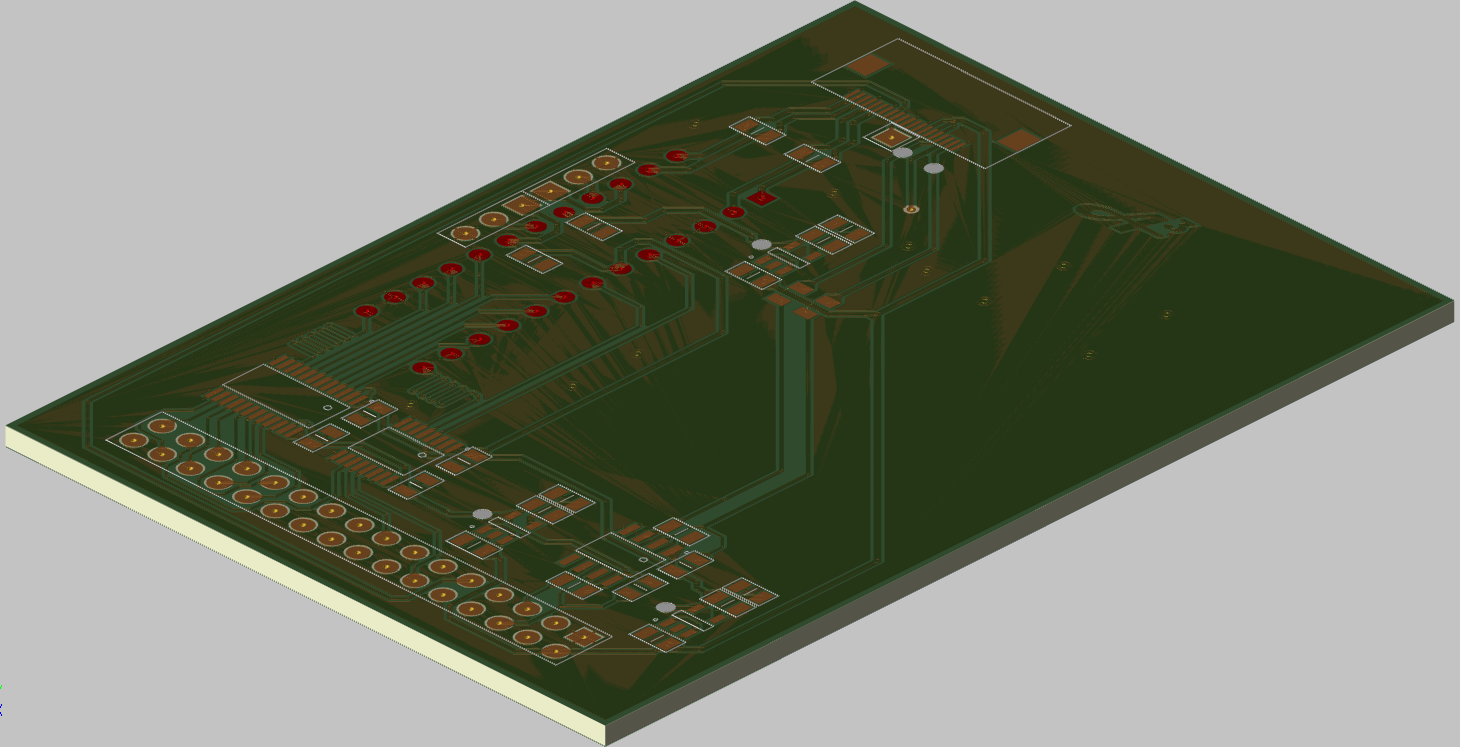
А дальше было дело техники. Нарисовать нормальную схему:

Ещё одна схема.
И сделать нормальную плату, которая показана на КДПВ.
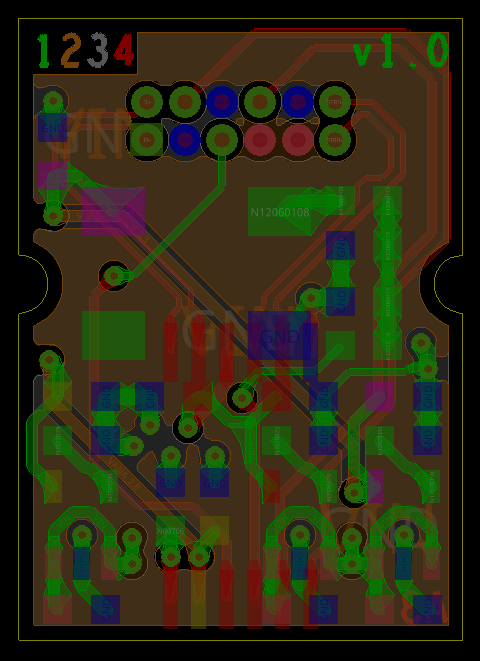
Плата, да.
В производство, собственно, ушел вариант транслятора на отдельной платке (пришлось дорожки по 75мкм делать), чтобы не удорожать производство материнки, куда это всё напаивалось.
Времени было на всё угрохано больше года. Сейчас это кажется диким и ужасно непродуктивным. Наверняка, есть много людей, проделавших бы подобное за пару месяцев. Но я был один, в коллективе никто таким не занимался, интернеты упорно молчали, совета просить было не у кого. Но опыт есть опыт. Я ни сколько не жалею о потраченном времени. Полученные знания бесценны! Предполагаю, подобным образом можно раскурить многие другие модули, которые всё еще ставятся в телефоны, ведь, по сути, никакой особой магии в них нет. Знай себе записывай правильные байтики в правильные регистры да трассировку корректную делай.
roboforum.ru
Здравствуйте! Я новичок, так что не ругайте сильно, но от критики и советов не откажусь. В общем, можно ли подключить модуль камеры смартфона (к примеру: от sony xperia z3 compact) к плате arduino или подобные? Хочется осуществить подключение к другому смартфону через wifi или bluetooth.
Заголовок сообщения: Re: Подключение модуля камеры к ардуино
Добавлено: 10 дек 2015, 01:14
| скрытый хозяин вселенной 🙂 |
первая причина по которой это нельзя сделать, ардуино во много раз «слабее» чем нужно для обработки картинок с камеры, вторая причина это отсутствие внятной документации на камеры от смартфонов, даже если и найти плату которая будет достаточно «мощная».
Обнаружение и слежение за лицом с использованием смартфона и Arduino


В этом проекте мы сделаем робота с функцией слежения за лицом. Работая над проектом, я старался чтобы описанное было как можно более простым в повторении, не требовало глубоких знаний и опыта в создании систем компьютерного зрения и программирования.
Распознавание лиц реализовано на смартфоне под управлением ОС Android в среде Processing. Для передачи данных с Android устройства на Arduino было решено использовать Bluetooth. Если Вам захочется развить проект, Вы всегда можете попробовать свои силы в программировании. APK файлы для установки, исходные коды программы под Android, скетч для Arduino и файлы 3D-моделей для печати можно скачать по этой ссылке.


Основные компоненты:
- Arduino
- 2 x сервоприводы
- Модуль Bluetooth HC-05 (или HC-06 или подобный)
- Смартфон с ОС Android
Под модулем HC-05 подразумевается не сам модуль, имеющий следующий вид:

А модуль, распаянный на примерно такой плате:

на которой есть штырьки для подключения, стабилизатор питания, кнопка для перевода в режим настройки и т.д.
Механизм поворота и наклона можно взять готовый или сделать самостоятельно из различных материалов. Это может быть картон, профиль, дерево, обрезки пластика (коробки из-под cd/dvd дисков, пластиковые корпуса и т.д.) и много чего ещё. Как говориться полная свобода для творчества. В данном случае был выбран вариант печати на 3D-принтере.
STL-файлы данного проекта также доступны для скачивания. Не обязательно печатать именно их, Вы можете взять за основу модели от другого держателя смартфона, механизма поворота/наклона, которые можно поискать на специализированных сайтах (thingiverse.com и т.д.) или создать свои модели. Немного про то, как можно развить проект будет в конце. Я разработал такую конструкцию для моего мобильного телефона MOTO G.
Для печати использовалось программное обеспечение Cura, использованные настройки приведены ниже. Вы можете использовать их или изменить их в зависимости от вашего принтера.
После распечатки деталей, собираем. Для соединения деталей можно использовать винты и клеевой пистолет. В собранном виде всё выглядит примерно так:




Подключение электроники
Основные детали — это Arduino, HC-05 модуль блютуза и два сервопривода. Для сборки можно использовать макетную плату. Соединение сигнальных линий показано на следующем изображении

С организацией питания есть множество вариантов. К примеру, если будете запитывать от внешнего блока питания на 5В, то схема может быть такая:

После блока питания можно поставить выключатель.
На модуле HC-05 обычно установлен линейный стабилизатор, на вход которого можно подавать 3.6-6В. Модуль блютуза можно подключить не на прямую к источнику питания, а к пину 5В Arduino Nano. Стабилизатор на Arduino Nano вполне выдержит такую дополнительную небольшую нагрузку.
На схеме выше источник питания подключен к Arduino Nano через пин VIN. Если Ваш источник питания выдаёт не более 5В, можно подключить не к пину VIN, а к пину 5В. Пин VIN идёт на вход линейного стабилизатора (обычно это LM1117), а с его выхода уже и запитывается Arduino. От пина 5В питание идёт на прямую на микроконтроллер и, если подадите слишком большое напряжение, микроконтроллер может выйти из строя.
Некоторые запитывая Arduino Nano через пин VIN, берут питание для однного-двух маломощных (на подобии SG-90) сервоприводов с пина 5В Arduino. Лучше так не делать, т.к. линейный стабилизатор на Arduino может сгореть. При подключении более мощных сервоприводов (MG995 и т.д.) тем более так не стоит подключать. На других платах Arduino может быть установлен более мощный стабилизатор, тогда подключение как минимум пары SG90 будет не проблема.
Кроме питания от внешнего блока питания можно использовать аккумуляторы. Это могут быть несколько NiMh аккумуляторов или один и более Li-ion.
К примеру, если будет использовано 4 NiMh АА аккумулятора, можно подключить как на схеме выше вместо блока питания, должно работать. Если всё-таки будет сбоить, дополнительно можно поставить повышающе-понижающий dc-dc преобразователь. Если запитывать более чем от 4 NiMh АА аккумуляторов, следует использовать понижающий dc-dc преобразователь.
Вместо NiMh аккумуляторов можно взять Li-ion. В аккумуляторах от мобильных телефонов обычно есть плата защиты. В типоразмере 18500, 18650. или примерно таких

плата защиты может быть, а может и отсутствовать. В данном случае плата защиты есть (обведена красным). Если платы защиты нет, она очень желательна — при глубоком разряде у Li-ion аккумуляторы сильно деградируют. Если использовать один Li-ion аккумулятор или несколько соединённых параллельно, очень удобный вариант — это использовать модуль зарядки со встроенной защитой на подобии такого модуля

т.к. для питания Arduino и сервоприводов нужно приблизительно 5В, а с аккумулятора будет примерно в диапазоне 3-4В, нужно будет подключить повышающий преобразователь. Получится примерно так:

Использовать для питания пальчиковые батарейки или как при съёмке видео крону и т.д., можно, но это не очень хороший вариант. У них очень маленькая ёмкость и их имеет смысл устанавливать в малопотребляющую электронику на подобии настенных часов, мультиметры и т.д. При питании таких вещей как моторы, сервоприводы (особенно мощные) они очень быстро «садятся», т.е. лучше использовать или блок питания или аккумуляторы, которые можно заряжать.
Организацию питания немного рассмотрели, перейдём к коду.
Программная часть
Как уже упоминалось ранее, распознавание и слежения происходит благодаря приложению под ОС Android. Это приложение создано с помощью Processing Android. В папке «Android» есть APK файлы «Face_tracking_with_arduino_android_app.apk» и «face_tracking2.apk», загрузите один из них на смартфон и затем установите. В face_tracking2 немного изменён способ подключения к HC-05, в некоторых ситуациях он может работать лучше.
На смартфоне зайдите в настройки Bluetooth, там произведите сопряжение (Pairing) с модулем. Пароль по умолчанию обычно 0000 или 1234. При сопряжении укажите название модуля «HC-05», если до этого уже произведено сопряжение и указано другое название, переименуйте в «HC-05». Приложение будет подключаться только к модулю с таким названием. Для работы нужно что бы модуль был настроен на битрейт «9600,1,0». В режиме настроек (обычно для этого режима настроен битрейт 38400) модуля HC-05 Вам могут понадобиться некоторые команды.
Проверка битрейта: at+uart?
Для установки: at+uart=9600,1,0
Изменения названия: at+name=HC-05
Изменение пароля: at+pswd=1234
Проверка режима работы (master, slave, slave-loop): at+role?
Установка режима работы в slave: at+role=0
Если будете использовать «Face_tracking_with_arduino_android_app», перед запуском HC-05 уже должен работать, т.к. подключение производится только при запуске приложения. Иногда это приводило к трудностям (выгружать приложение, отключать HC-05 и bluetooth в телефоне и т.д.) и подключение было немного переделано. В «face_tracking2» подключение перенесено в функцию draw и немного изменено — постоянно проверяет, если не подключено и есть «HC-05″, пробует к нему подключиться (т.е. HC-05 модуль можно подключать и после запуска программы). Какой вариант будет работать лучше на Вашем телефоне, тот и используйте. Если захотите ещё как-то переделать, исходные коды проекта находятся в папке » Android».
Теперь запустите приложение. В зависимости от смартфона, его нужно развернуть в ландшафтном или портретном режиме. После запуска, если всё нормально, Вы увидите на экране изображение с камеры и вверху надпись «Connected to: HC-05» в верхней части экрана.

Для удобства проверки можно использовать фотографию (открыть на компьютере и т.д.). Наведите камеру смартфона на лицо и вокруг него должно появиться зеленое поле. В левом верхнем углу синим текстом будут отображаться координаты.
После обнаружения лица и определения координат, приложение вычислит, нужно ли и в каком направлении нужно переместиться, чтобы лицо на изображении оказалось по центру. Эти данные затем по Bluetooth отправляются на Arduino.
Программа для Arduino в этом проекте не сложная. Получая данные от смартфона, мы подаём соответствующие управляющие импульсы на сервоприводы.
На Arduino есть UART, но он задействован при загрузке скетча и для вывода отладочной информации. Его можно использовать для подключения Bluetooth модуля, но это не удобно. В данном случае было решено использовать библиотеку SoftwareSerial для программного UART. В скетче настройка пинов для UART происходит в следующей строчке:
SoftwareSerial cam_BT (12, 11); //RX, TX
TX UART`а это вывод D12, он подключен к выводу RX модуля HC-05
RX UART`а это вывод D11, он подключен к выводу TX модуля HC-05
Далее для Bluetooth настраивается битрейт 9600 бод:
Если Ваш модуль настроен на другой битрейт, или перенастройте модуль Bluetooth или задайте такой же битрейт в скетче Arduino.
Далее проверяется, есть ли не считанные данные от Bluetooth и если есть, они считываются и сохраняются в переменную BluetoothData:
if (cam_BT.available())
<
BluetoothData=cam_BT.read();
Serial.print(«Incoming from BT:»);
Serial.println(BluetoothData);
>
В зависимости от получаемых со смартфона данных, переменные pos1 и pos2 увеличиваются или уменьшаются на 2 и эти переменные передаются в функцию write для задания положения сервоприводов:
Вместо изменения на 2, Вы можете использовать число больше или меньше, чтобы замедлить или ускорить движение сервоприводов. При задании слишком большого значения, камера будет постоянно проскакивать нужную позицию.
Дальнейшее развитие проекта
Этот проект создавался максимально простым, что бы его было легче повторить и понять исходный код. Разобравшись, что и как работает, можно будет улучшать какие-либо его части или переделывать для выполнения других задач.
Поделюсь некоторыми идеями, что можно реализовать. В текущем виде происходит только слежение за лицом и при нажатии на экран сохраняется фото с камеры. Можно сделать автоматическое сохранение фотографий при обнаружении лица. Для реализации интерактивного робота, вместо изображения с камеры, на экране можно нарисовать лицо. Так же можно сделать робота подвижным:


Если на смартфоне нет фронтальной камеры, с обратной стороны смартфона можно разместить одну или несколько светодиодных матриц, на которых выводить анимированные смайлики, глаза и т.д.
Можно сделать «живую картину». Принцип работы может быть следующим: выводится изображение, а когда приложение распознаёт лицо, начать воспроизводить видео. Это могут быть картины природы или людей (некоторые из серии слабонервным не смотреть) или ещё что-то. Видео можно сделать самостоятельно или поискать что-то готовое, к примеру на YouTube.
Можно сделать дополнительную фигурку и за счёт распознавания лица (т.е. кто-то стоит и смотрит в её сторону) реализовать интерактивное поведение — мигать глазами, воспроизводить звуки, при использовании сервоприводов фигурка сможет ещё и двигаться. К примеру, вот пара фотографий из одного проекта в сети таких фигурок на Хэллоуин:


С идеями на этом закончим, можете использовать их или придумать ещё что-то своё.
И в заключении рассмотрю, как настроить Processing (под Windows) для создания приложения под Android. Файлы для скачивания Processing находятся на официальном сайте тут . Скачиваете архив, распаковываете и запускаете файл processing.

На основе среды Processing сделана Arduino Ide, так что интерфейс Вам покажется знакомым. Посмотрите в правый верхний угол приложения, там скорей всего у Вас будет отображаться «Java». Это текущий режим работы, но нам нужен не он, а «Android». Нажимаем и появится меню. Если до этого не было установлено других режимов, меню будет таким:

Нажимаете на «Добавить режим», появится такое окно:

Выбираете пункт «Android Mode» и нажимаете кнопку «Установить» («Install»). После окончания установки переключитесь на закладку «Библиотеки» (в левом верхнем углу «Libraries»):

В данном проекте нам понадобиться библиотека «Ketai». В верху в поле поиска введите «Ketai», затем выберете её в списке и нажмите » Установить». Теперь это окно и Processing можно закрыть, чтобы перезапустить.
После запуска в верхнем правом углу переключаетесь в режим «Android»:

Теперь Вы сможете править код и запускать его на смартфоне. Для запуска, как и в Arduino Ide нажимается кнопка с изображением треугольника. Перед запуском подключите свой смартфон к компьютеру. На нём должна быть разрешена отладка по USB, но как настраивать ищите сами, т.к. эта настройка сильно зависит от телефона. После подключения смартфона, выберите его в меню («Android» -> «Devices»):

По коду ещё только одно замечание. Если у вас на телефоне более одной камеры, возможно первое что может понадобиться изменить — это с какой камеры получать изображение. Выбор камеры производится в строчке:
Вместо «0» впишите нужный индекс камеры.
Автор: Aswinth Raj
Перевод и адаптация: RobotoTehnika.ru