Как работает система трн ад
- Электронный архив ТПУ
- Образование
- Студенческие работы
- Выпускные квалификационные работы (ВКР)
Пожалуйста, используйте этот идентификатор, чтобы цитировать или ссылаться на этот ресурс: http://earchive.tpu.ru/handle/11683/60927
| Название: | Электропривод вентилятора по системе ТРН-АД |
| Авторы: | Цэдэн, Хишгээ |
| Научный руководитель: | Воронина, Наталья Алексеевна |
| Ключевые слова: | электропривод вентилятора; тиристорный регулятор напряжения — асинхронный двигатель; переходные процессы; имитационное моделирование; показатели качества динамических процессов; fan electric motor; thyristor Voltage Regulator — Asynchronous Motor; transient process; simulation modeling; quality indicators of dynamic processes |
| Дата публикации: | 2020 |
| Библиографическое описание: | Цэдэн Х. Электропривод вентилятора по системе ТРН-АД : бакалаврская работа / Х. Цэдэн ; Национальный исследовательский Томский политехнический университет (ТПУ), Инженерная школа энергетики (ИШЭ), Отделение электроэнергетики и электротехники (ОЭЭ) ; науч. рук. Н. А. Воронина. — Томск, 2020. |
| Аннотация: | В работе рассмотрены вопросы, связанные с исследованием электропривода вентилятора на базе системы «Тиристорный регулятор напряжения — асинхронный электродвигатель». В выпускной работе произведен выбор и конструирование силовой схемы, элементов электропривода и вентилятора. Рассчитаны параметры электродвигателя, исследована работа системы при прямом и плавном пуске. В результате были определены параметры системы: диапазон регулирования скорости, время переходного процесса для различных режимов работы, а также минимальное напряжение. Моделирование проводилось в Matlab simulink. The paper considers issues related to the study of the electric motor fan based on the system «Thyristor voltage regulator — asynchronous electric motor». In the final work, the selection and design of the power circuit, elements of the electric drive and fan were made.The parameters of the electric motor are calculated, the operation of the system with direct and smooth start is investigated.As a result, the system parameters were determined:speed control range, transient process for various operating modes, as well as minimum voltage. The simulation was carried out in Matlab simulink. |
| URI: | http://earchive.tpu.ru/handle/11683/60927 |
| Располагается в коллекциях: | Выпускные квалификационные работы (ВКР) |
Файлы этого ресурса:
| Файл | Описание | Размер | Формат |
|---|---|---|---|
| TPU929738.pdf | 3,31 MB | Adobe PDF | Просмотреть/Открыть |
Все ресурсы в архиве электронных ресурсов защищены авторским правом, все права сохранены.
Как работает система трн ад
Актуальность работы обусловлена необходимостью внедрения замкнутых бездатчиковых асинхронных электроприводов по схеме ТРН – АД с наблюдателями скорости для широкого класса механизмов с относительно небольшим диапазоном регулирования, например механизмов собственных нужд ТЭС. Целью работы является исследование статики и динамики замкнутого асинхронного электропривода по схеме ТРН – АД с нейросетевым наблюдателем угловой скорости, обоснование выбора типа и структуры нейроэмулятора. В статье показана перспективность построения замкнутого бездатчикого асинхронного электропривода по схеме ТРН – АД с нейросетевым наблюдателем скорости. Представлена интегральная оценка качества управления при различных циклах работы асинхронного электропривода по схеме ТРН – АД с нейросетевым наблюдателем угловой скорости. Представлена структура нейросетевого наблюдателя угловой скорости для замкнутого асинхронного электропривода по схеме ТРН-АД.

собственные нужды тепловых электрорстанций
алгоритм Левенберга – Марквардта
искусственная нейронная сеть
наблюдатель
софт – стартер
тиристорный регулятор напряжения
асинхронный двигатель
1. Абрамов Б.И., Дацковский Л.Х., Кузьмин И.К., Придатков А.Г., Лиморенко П.М. Устройства плавного пуска в электроприводах горных механизмов // Электротехника. — 2014. — № 1. С. 19-27.
2. Козлова Л.Е., Тимошкин В.В., Глазырин А.С. Разработка наблюдателя скорости для системы управления асинхронного электропривода с тиристорным регулятором напряжения // Фундаментальные исследования. – 2012. № 9, ч. 3. C. 656-661.
3. Клепиков В.Б., Махотило К.В., Сергеев С.А., Обруч И.В. Применение методов нейронных сетей и генетических алгоритмов в решении задач управления электроприводами // Электротехника. — 1999. № 5. – С. 2–6.
4. Устройство для определения оценки частоты вращения асинхронного двигателя : патент Рос. Федерации № 2476983, заявл. 26.08.2011; опубл. 27.02.2013.
5. Глазырин А.С., Ланграф С.В., Козлова Л.Е., Глазырина Т.А., Тимошкин В.В., Афанасьев К.С. Разработка и исследование нейросетевого регулятора для электропривода с механической нагрузкой типа «пара трения» // Доклады Томского государственного университета систем управления и радиоэлектроники. – 2011. № 1 (23). C. 171-177.
6. Глазырин А.С., Боловин Е.В. Разработка и лабораторное апробирование метода идентификации параметров электродвигателей на основе разностных схем // Известия Томского политехнического университета. – 2012. № 4. – С. 112 – 115.
7. Проектирование и исследование автоматизированных электроприводов. Ч. 8 Асинхронный частотно-регулируемый электропривод : учебное пособие / Л.С. Удут, О.П. Мальцева, Н.В. Кояин; ТПУ. — Томск : Изд-во ТПУ, 2010. — 448 с.
8. Marcian Cirstea, Andrei Dinu, Malcolm McCormick, Jeen Ghee Khor. Neural and Fuzzy Logic Control of Drives and Power Systems. Newnes. 2002. 399 p.
9. D. Fewson. Introduction to Power Electronics. Butterworth Heinemann. 1998. 208 p.
Основными механизмами собственных нужд (СН) на тепловых электростанциях (ТЭС) являются ленточные конвейеры, мельницы, тягодутьевые машины, компрессоры, насосы и т.д. Регулируя интенсивность работы каждого механизма СН, можно добиться увеличения КПД электростанции за счет более эффективного сжигания топлива [1].
Авторам представляется перспективным внедрение замкнутых бездатчиковых асинхронных электроприводов (АЭП) по схеме ТРН – АД для автоматизации механизмов СН тепловых электростанций (ТЭС).
Система управления двигателем по схеме ТРН-АД [2] применяется в таких механизмах, как насосы и вентиляторы, а также в тех механизмах, в которых не требуется широкого диапазона регулирования скорости [3].
Система управления по схеме ТРН-АД по сравнению с частотным способом имеет свои достоинства и недостатки.
По данным [4], стоимость преобразователя частоты в несколько раз больше стоимости ТРН. А с увеличением мощности разница стоимости увеличивается.
Для определенных типов механизмов, для которых необходим небольшой диапазон регулирования скорости, достаточно использования системы управления по схеме ТРН-АД.
Система управления по схеме ТРН-АД имеет наиболее удобный способ управления. Так, для векторного способа управления необходимо знать правильные паспортные данные электродвигателя. Векторный способ требует сложных математических расчетов в режиме реального времени.
В системе управления по схеме ТРН – АД присутствуют большие потери энергии при снижении скорости, что уменьшает КПД электропривода. Но данный недостаток несущественен, если работа на пониженных скоростях кратковременна, а диапазон регулирования не больше, чем 1:4.
Искаженное напряжение и появление токов высших гармоник в сети может негативно сказаться на потребителях, подключенных к одной линии с ТРН – АД.
Для регулирования скорости работы каждого механизма необходимо использовать замкнутую систему управления по скорости. Использование реальных датчиков скорости для регулирования скорости приводит к удорожанию самой системы управления, увеличению частоты отказов оборудования, повышению риска взрывоопасности, увеличению габаритов оборудования [5]. Поэтому установка дополнительных измерительных приборов для измерения скорости крайне нежелательна и нецелесообразна по соображению технологического процесса.
Целью данной статьи является показать особенности построения и анализа статических и динамических режимов работы замкнутого асинхронного электропривода по схеме ТРН-АД с обратной связью от наблюдателя состояния, построенного на основе искусственной нейронной сети.
Функциональная схема микропроцессорного асинхронного электропривода по схеме ТРН-АД с обратной связью по скорости
Функциональная схема микропроцессорного (МК) асинхронного электропривода по схеме ТРН-АД с обратной связью по скорости (рис. 1) в основном состоит из таких блоков, как: микропроцессор (МК), состоящий из регулятора скорости (РС) и системы управления (СУ), тиристорный регулятор напряжения (ТРН), асинхронный двигатель (АД), датчики тока (ДТ) и напряжения (ДН). Обратная связь по скорости может быть организована через датчик скорости (ДС) или наблюдатель скорости (НС).
 а)
а) 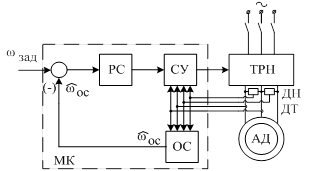 б)
б)
Рис. 1. Функциональная схема микропроцессорного асинхронного электропривода по схеме ТРН-АД с обратной связью по скорости: а) от датчика скорости, б) от наблюдателя скорости.
Функциональная схема микропроцессорного асинхронного электропривода по схеме ТРН-АД с обратной связью по скорости от датчика скорости является стандартной и пояснения работы не требует. НС проводит оценку скорости вращения вала асинхронного двигателя за счет обработки данных, полученных от датчиков тока и напряжения. Структура наблюдателя может быть различной: на основе уравнений Люенбергера, фильтра Калмана, нечеткой логики, нейро-нечеткой логики, нейронной сети и др. Каждая из схем обладает своими преимуществами и недостатками. Достоинством схемы с обратной связью по скорости от датчика является точность измерения сигнала обратной связи, а недостатком — сложность в обслуживании из-за конструктивных особенностей с высокой частотой отказов. В свою очередь схема с обратной связью от НС требует предварительной настройки, но проста в использовании, обладает менее высокой точностью оценивания, уменьшает количество отказов из-за отсутствия ДС, экономически выгодна по сравнению с предыдущей схемой.
Разработка нейросетевого наблюдателя скорости для замкнутого асинхронного электропривода по схеме ТРН-АД
Искусственная нейронная сеть в общем случае представляет собой компьютерную программу, обладающую способностью к обучению, сохранению полученного знания и представлению его оператору. Знание программа получает в процессе обучения, а полученные знания сохраняются в синаптических весах [3].
Главными особенностями для построения нейронной сети является количество слоев в скрытом слое, тип нейрона и тип самой нейронной сети. Эти параметры в основном влияют на скорость и качество обучения, а также на способность реагирования системы в динамическом режиме. Особенностью обучения нейронной сети является выбор тренировочных наборов и количество данных в каждом тренировочном наборе. Если величина данных будет слишком большой, то это может привести к переобучению ИНС, в то же время небольшое количество данных приведет к недообучению. Следствием чего будет высокая ошибка обучения.
Математически определение мгновенной величины оценки частоты вращения ротора двигателя определяется по формуле [8]:

,
где m – количество нейронов в скрытом слое,
n – количество нейронов во входном слое,
w1ji – синаптический вес i-го входа j-го нейрона скрытого слоя,
w1j0 – сдвиг j-го нейрона скрытого слоя,
w2j – синаптический вес j-го входа нейрона выходного слоя,
w20 – сдвиг нейрона выходного слоя,
xi – входные сигналы искусственной нейронной сети.
АЭП СН ТЭС является нелинейной динамической системой, а следовательно, для построения наблюдателя скорости следует применять динамические нейронные сети, выполненные, например, по схеме Элмана и Джордана. Такие сети похожи между собой тем, что имеют во входном слое, помимо входных данных, обратную связь с задержкой. Для сети Элмана обратной связью являются сигналы с внутреннего слоя сети, а для сети Джордона обратная связь с задержкой поступает от нейронов выходного слоя. Данный способ позволяет учесть предысторию событий для последующей правильности выработки стратегии управления объектом. Данные сети пригодны для управления движущимися объектами, так как обладают функцией запоминания предыстории событий.
В [8] был разработан способ определения оценки частоты вращения асинхронного двигателя на основе сети Джордона. Входными данными в этой ИНС являются сигналы с датчиков фазных токов, фазных напряжений (и их задержки) и обратная связь по оценке частоты вращения асинхронного двигателя с задержкой. Таким образом, количество нейронов во входном слое равно 17, в скрытом – 80, в выходном – 1. Функцией активации всех нейронов скрытого слоя является гиперболический тангенс, выходного слоя – линейная. Нейроны входного слоя передают данные скрытому слою без преобразования.
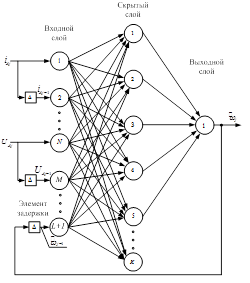
Рис. 2. Структурная схема нейронной сети.
Исследование статических механических и электромеханических характеристик замкнутого асинхронного ЭП по схеме ТРН-АД
Согласно [9] уравнение, описывающее статические механические характеристики замкнутого асинхронного ЭП по схеме ТРН-АД с ДС, имеет вид:
(1)
где  — скорость идеального холостого хода,
— скорость идеального холостого хода,  – модуль жесткости, которая определяется заданием и коэффициентом обратной связи по скорости
– модуль жесткости, которая определяется заданием и коэффициентом обратной связи по скорости  . При большем значении жесткость искусственных механических характеристик получается значительной, и можно считать, что уравнение (1) удовлетворительно описывает реальную механическую характеристику.
. При большем значении жесткость искусственных механических характеристик получается значительной, и можно считать, что уравнение (1) удовлетворительно описывает реальную механическую характеристику.
При данном способе регулировании скорости потери в роторной цепи пропорциональны скольжению. Для двигателей с независимой вентиляцией работа на низких скоростях возможна при снижении его нагрузки в обратно пропорциональной зависимости от скольжения. Для двигателей с самовентиляцией снижение нагрузки должно быть значительнее. Это связано с ухудшениями условий вентиляции двигателя на малых скоростях [9].
Учитывая вышесказанное, область применения данного способа управления ограничивается механизмами, у которых момент нагрузки при регулировании скорости уменьшается [9] — например, механизмы с вентиляторной нагрузкой, к числу которых относится большинство механизмов СН ТЭС.
Для поддержания электроприводом скорости при различных значениях момента необходимо проверить жесткость механических характеристик для разомкнутой и замкнутой системы.
Жесткость механической характеристики определяется по формуле [7]:
где  — изменение момента на единицу длины,
— изменение момента на единицу длины,  — изменение скорости на ту же единицу длины. Чем больше жесткость k характеристики, тем лучше система поддерживает постоянство скорости.
— изменение скорости на ту же единицу длины. Чем больше жесткость k характеристики, тем лучше система поддерживает постоянство скорости.
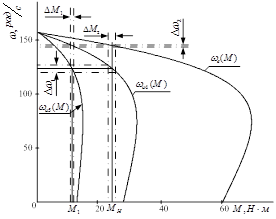
Механические характеристики для разомкнутой и замкнутой системы представлены на рис. 3.
 а)
а) 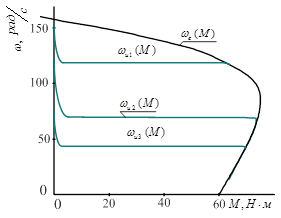 б)
б)
Рис. 3. Механическая характеристика а) разомкнутого и б) замкнутого асинхронного электропривода по схеме ТРН – АД:  — искусственные механические характеристики при скорости задания 120
— искусственные механические характеристики при скорости задания 120  , 70 , 40 , напряжения задания 150
, 70 , 40 , напряжения задания 150  , 120 ;
, 120 ;  — естественная механическая характеристика,
— естественная механическая характеристика,  — изменение скорости и момента на одну единицу длины для вычисления коэффициента жесткости.
— изменение скорости и момента на одну единицу длины для вычисления коэффициента жесткости.
Из рисунка 3 видно, что жесткость механической характеристики выше в замкнутом асинхронном электроприводе по схеме ТРН – АД. Сравнение коэффициента жесткости для замкнутого и разомкнутого АЭП по схеме ТРН – АД для естественной и искусственной характеристики представлена в табл. 1.
Таблица 1. Сравнительная таблица коэффициента жесткости для замкнутой и разомкнутой схемы
Как работает система трн ад
В данной работе рассмотрены достоинства и недостатки тиристорного регулятора напряжения асинхронного двигателя по сравнению с преобразователем частоты. Исследован тиристорный регулятор напряжения асинхронного двигателя с замкнутым контуром скорости по сигналу с нейросетевого наблюдателя скорости. Рассмотрен принцип построения нейроэмулятора и метод его обучения. На вход нейронной сети подаются сигналы с датчиков тока, напряжения и момента, которые в достаточной мере позволяют производить оценку скорости вращения вала двигателя. Была разработана уточненная модель тиристорного регулятора напряжения, которая позволяет регулировать скорость вращения двигателя, изменяя угол открытия ключей. Адекватность работы модели устанавливается при помощи модульной и среднеквадратичной оценки качества, полученных при помощи переходных процессов АЭП с контуром скорости, замкнутого по сигналам с наблюдателя.
нейросетевой наблюдатель скорости.
тиристорный регулятор напряжения
асинхронный электропривод
1. Бесекерский В.А., Попов. Е.П. Теория систем автоматического управления. — 4-е изд., перераб. и доп. — СПб. : Профессия, 2004. — 747 с.
2. Виноградов А.Б. Векторное управление электроприводами переменного тока / ГОУ ВПО «Ивановский государственный энергетический университет имени В.И. Ленина». – Иваново, 2008. – 298 с.
3. Герман-Галкин С.Г. Компьютерное моделирование полупроводниковых систем в MATLAB 6.0 : учебное пособие. — СПб. : Корона принт, 2001. — 320 с.
4. Козлова Л.Е., Тимошкин В.В., Глазырин А.С. Разработка наблюдателя скорости для системы управления асинхронного электропривода с тиристорным регулятором напряжения // Фундаментальные исследования. – 2012. — № 9 (ч. 3). – С. 656-661.
5. Ланграф С.В. Асинхронный моментный электропривод с векторным управлением для имитации усилий запорной арматуры магистральных нефтепроводов : дис. … канд. техн. н. : 05.09.03. – Томск, 2007. – 164 с.
6. Сивохин А.В. Искусственные нейронные сети / А.В. Сивохин, А.А. Лушников, С.В. Шибанов. – Пенза : Пенз. гос. ун-т, 2004. – С. 136.
7. Ткачук Р.Ю., Глазырин А.С., Ланграф С.В. Прямое управление моментом асинхронного двигателя на основе уточнённой модели токов стержней ротора без использования датчиков механических и магнитных переменных // Изв. вузов. Электромеханика. – 2011. — № 1. – С. 51-56.
8. Bose Bimal K. Modern power electronics and AC drives / Bimal Bose. — Prentice Hall PTR, 2002. — 771 c.
Введение. Немаловажными факторами при выборе способа управления объектом являются: простота управления и ценовой диапазон стоимости аппаратуры. В настоящее время в системе управления питателями сырого угля (ПСУ) используются асинхронные двигатели (АД) с короткозамкнутым ротором (КЗ), преобразователи частоты или система плавного пуска.
Для исключения проблем с проскальзыванием, для контроля подачи топлива ПСУ необходимо поддерживать постоянность скорости вращения вала двигателя. Для этой цели подходит преобразователь частоты (ПЧ), при помощи векторного управления которого можно поддерживать жесткие механические характеристики. Но согласно исследованиям [7] стоимость ПЧ значительно превышает стоимость тиристорных регуляторов напряжения (ТРН), на основе которого будет выполнена система плавного пуска.
Так как стартовый момент зависит от загруженности конвейера и пусковые токи могут превышать номинальное значение тока двигателя в несколько раз, то использование системы мягкого пуска позволит уменьшить его величину. Для решения поставленной задачи необходимо построение замкнутой системы для системы мягкого пуска на основе идентификации скорости на основе искусственной нейронной системы (ИНС).
Задачей данной статьи является создание нейросетевого наблюдателя скорости и анализ его работоспособности в системе управления электропривода (ЭП) по схеме ТРН-АД, созданного по данным с датчиков тока и напряжения. Особенностью работы является проверка адекватности работы нейросетевого наблюдателя скорости в системе управления.
Математическое описание процессов, проходящих в асинхронном электродвигателе, имеет вид [2; 5]:
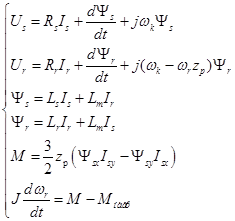
,

где — векторы напряжения, тока и потокосцепления.
Из системы уравнения видно, что скорость вращения вала двигателя зависит от многих параметров: тока, напряжения, потокосцепления, параметров электродвигателя и др. Нейронная сеть (НС) позволяет проводить оценку параметра по данным небольшого количества входных данных. Таким образом была создана нейронная сеть для оценивания скорости вращения вала АД по данным только с датчиков тока и напряжения.
Имитационная модель системы ТРН-АД представлена на рисунке 1. Управление системой происходит при поступлении на вход системы задания по скорости. В блоке Subsystem 1 происходит синхронизация системы управления с питающей сетью («ловится» момент перехода питающего напряжения через «0»). Далее полученный сигнал, значение угла открытия тиристора подается на блок системы импульсно-фазового управления (СИФУ), в котором рассчитывается значение времени открытия тиристоров. В блоке Subsystem 2 смоделирован блок тиристоров. Так как в схеме использовалась модель асинхронного двигателя в двухфазной системе координат, то необходимо использовать блок Subsystem 3, для преобразования координат из трехфазной в двухфазную.
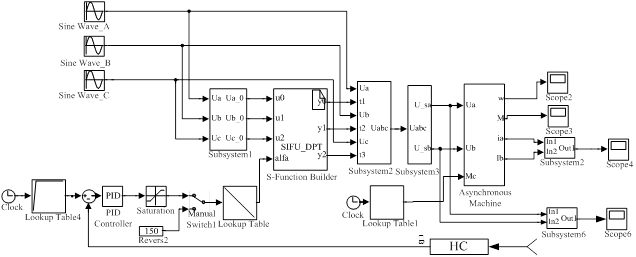
Рис. 1. Имитационная модель электропривода по схеме ТРН‑АД
Нейросетевой наблюдатель скорости. При разработке нейросетевого наблюдателя использовалась структура сети, на входе которого имеется 13 нейронов, скрытый слой состоит из двух слоев по 43 и 111 нейронов в каждом, а выходной из – 1. В качестве функции активации скрытого слоя была выбрана логистическая функция
[8]
Тренировочный набор для НС наблюдателя был получен на основе имитационной модели, представленной на рисунке 1. Входными параметрами являлись: среднеквадратичное значение напряжения и его задержка, среднеквадратичное значение тока и его задержка, момент двигателя и его задержки. Для тренировочного набора были представлены значения тока и напряжения, над которыми было произведено интегрирование и дифференцирование. Выходным параметром для обучения нейронного наблюдателя являлся вектор заданных значений скорости. Для уменьшения ошибки и быстроты вычислений при обучении использовался метод Левенберга-Марквардта [6]. Данный метод оптимально подходит для обучения нейронной сети, результаты получаются с небольшими затратами вычислительной мощности машины по сравнению с другими методами обучения. Тренировочный набор составлялся для различных значений скорости задания, активной и вентиляторной нагрузки.
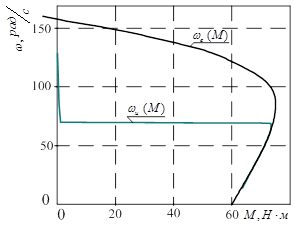
Рис. 2. Механическая естественная и искусственная характеристики
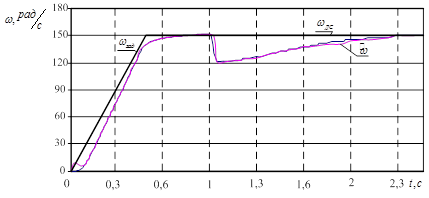
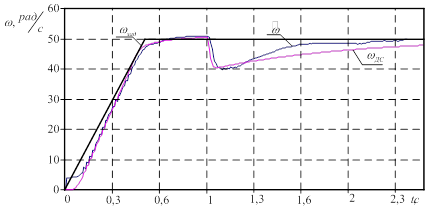
Результаты исследования. Обучение НС, проверка работоспособности наблюдателя скорости проводились в программной среде Matlab 7.10.0. [3], графики переходных процессов в АЭП при пуске и набросе нагрузки представлены на рис. 3.
Для оценки качества переходных процессов управления используется модульная оценка качества [1; 4]:
где  — сигнал задания скорости;
— сигнал задания скорости;  — управляемая переменная.
— управляемая переменная.
Величина динамических отклонений и его длительность оценивается интегральной оценкой. Чем меньше величина оценки, тем лучше качество процесса управления.
Помимо интегральной оценки, производилось исследование среднеквадратичной ошибки оценивания скоростей, приведенных к номинальным значениям скорости:
где  — идентифицируемый сигнал скорости на шаге интегрирования
— идентифицируемый сигнал скорости на шаге интегрирования  ;
;  – оценка сигнала скорости на шаге интегрирования ;
– оценка сигнала скорости на шаге интегрирования ;  — номинальное значение сигнала скорости.
— номинальное значение сигнала скорости.

На основании математической модели исследовались механические характеристики замкнутого электропривода, рис. 2. Из рисунка можно видеть, что при скорости задания модель отрабатывает заданное значение. Механическая характеристика характеризуется абсолютной жесткостью.
а)
б)
Рис. 3. Графики переходного процесса с датчиком скорости  и нейросетевым наблюдателем скорости
и нейросетевым наблюдателем скорости  по сравнению со скоростью задания
по сравнению со скоростью задания  : а)
: а)  ; в)
; в) 
В таблице 1 представлены показатели качества переходных процессов АЭП с контуром скорости, замкнутого по сигналу с датчика и наблюдателя скорости, из которого видно, что статическая ошибка, модульная среднеквадратичная оценки качества при уменьшении скорости задания увеличиваются. В системе имеется провал скорости, но в случае использования нейроэмулятора скорости время восстановления скорости задания меньше.
Таблица 1 — Показатели качества переходных процессов АЭП с контуром скорости, замкнутого по сигналам с датчика и наблюдателя

Задание на скорость , рад/с

Модульная оценка качества,

Среднеквадратичная оценка качества,

Статическая ошибка, % от
Провал скорости, % от
1.3. РАСЧЁТ СИСТЕМЫ «ТРН – АД» С ПОДЧИНЁННЫМ РЕГУЛИРОВАНИЯ КООРДИНАТ

В последние годы предпринимаются попытки создания системы «ТРН – АД» с подчинённым регулированием координат [64], [65]. Система (ТРН – АД» с подчинённым регулированием реализуется в виде двухконтурной схемы с подчинённым внутренним контуром момента (рис. 1.9). В системе на усилителе А1 реализован регулятор скорости, на усилителе А2 – регулятор момента, a в качестве датчика момента UM-устройство, построенное на базе датчиков тока UA1, UA2 и датчиков напряжения UV1, UV2. Синтез параметров такой системы во всём диапазоне изменения скорости затруднителен из-за сложности описания АД как объекта системы регулирования. Поэтому будем рассматривать синтез параметров системы при определённых допущениях в математическом описании.
Учитывая, что наиболее тяжёлым режимом работы АД является работа на малых скоростях, когда колебания момента и скорости за счёт электромагнитных переходных процессов имеют слабозатухающий характер, настройку системы электропривода целесообразно проводить при скорости, равной нулю, и моменте двигателя, равном пусковому. В этом случае электромагнитный момент двигателя в переходном режиме опиисывается уравнением:
где g1,g2 – коэффициенты затухания свободных составляющих момента двигателя; W0 = 2×p×f – круговая частота питающей сети.
Анализ уравнения (1.43) в полном объёме затруднителен. Его можно провести, если ввести допущения, как сделано в [64], а именно:
2) учесть, что для серийных АД Sк = (0,2…0,5) и s = (0,05…0,1);
3) учесть, что конкретные значения коэффициентов затухания будут лежать в пределах g1~(0,005…0,025), g2 ~ (0,4…1,0).
Тогда в уравнении (1.43) следующие выражения будут иметь вид:
Обозначим 1/g1×W0 = T1; 1/g2×W0 = Т2 – как постоянные времени затухания свободных затухающих момента. Учитывая численные значения коэффициентов затухания g1 и g2, получим значения постоянных времени для серийных двигателей:
Пренебрегая в уравнении (1.46) малыми величинами, получим:
Из выражения (1.44) видно, что электромагнитный момент двигателя в переходных режимах может быть представлен тремя составляющими:
Такие соображения позволяют приближённо представить передаточную функцию АД в виде:
где Kм = Мп/Uн – коэффициент передачи АД по моменту; Т2 = – постоянная времени, характеризующая апериодическую составляющую момента, которая определяется параметрами схемы замещения АД; Т0 = 1/W0 – постоянная времени затухания периодической составляющей, определяемая частотой сети.
Учитывая дискретность управления СИФУ тиристорного регулятора напряжения, передаточную функцию ТРН можно представить в виде:
где Kп = Kп1 Kф = DU1×Da / Da×DUу – коэффициент усиления ТРН с учётом СИФУ; Kп1 – коэффициент п
ередачи силовой части ТРН, определяемый (см. рис.1.5) при конкретном угле нагрузки (j); tп – постоянная времени чистого запаздывания преобразователя (для симметричной схемы силовой части ТРН и частоты сети 50 Гц tп = 0,0033 с).
Структурная схема двухконтурной системы регулирования скорости с учётом линеаризации характеристик АД и ТРН будет иметь вид (рис. 1.10).
Произведём настройку регуляторов при синтезе системы на технический оптимум. За малую постоянную времени внутреннего контура примем Тm =Т2 + tп, аппроксимировав предварительно звено чистого запаздывания Kп×е t пр ~ Kп/(tпр + 1), апериодическим звеном и пренебрегая малыми второго порядка. В результате получим:
Выбор в качестве составляющей некомпенсированной постоянной времени Т2, несмотря на то, что она больше постоянной времени Т0, обусловливается тем, что апериодическая составляющая электромагнитного момента затухает быстрее чем колебательная.
Таким образом, передаточная функция разомкнутого внутреннего контура регулирования будет иметь вид:
где Kом – коэффициент обратной связи по моменту.
Передаточная функция регулятора момента при принятой настройке на технический оптимум определяется следующим образом:
Из полученного выражения (1.46) видно, что регулятор момента получается дифференциально-интегральным. Передаточную функцию регулятора удобно разбить на два звена с передаточными функциями:
Такая разбивка обусловлена тем, что звено с передаточной функцией (Т0 2 р 2 + 1) не зависит от параметров электропривода, то есть не требует настройки. Однако это звено обладает низкой помехозащищённостью, поэтому его целесообразно дополнить фильтром низких частот с передаточной функцией:
Тогда передаточная функция регулятора момента будет иметь вид:
Введение фильтра низких частот в прямой канал внутреннего контура регулирования снижает быстродействие контура. Поэтому для уменьшения влияния фильтра на быстродействие контура, выбирают постоянную времени фильтра, равную:
а коэффициент демпфирования z = 0,7. Причём значения Тф учитывают при расчёте некомпенсированной постоянной времени контура:
Передаточная функция оптимизированного контура регулирования момента (без учёта влияния фильтра) будет иметь вид:
Передаточная функция регулятора скорости при настройке системы на технический оптимум имеет «стандартный» вид, подобный передаточной функции регуляторов приводов постоянного тока:
Передаточная функция оптимизированного замкнутого контура скорости имеет вид:
Построение и анализ кривых изменения момента АД, скорости во времени при различных значениях управляющего сигнала и момента нагрузки можно выполнить по структурной схеме (см. рис. 1.10) при рассчитанных параметрах регуляторов с использованием программы структурного моделирования «SMOD».
Определённые трудности при построении внутреннего контура регулирования момента вызывает реализация датчика электромагнитного момента двигателя.
Один из вариантов построения датчика электромагнитного момента двигателя основан на измерении электромагнитной мощности двигателя: