Repeating Sequence
Блок Repeating Sequence выводит периодический скалярный сигнал, имеющий форму волны, что вы задаете использование параметры Output values и Time values. Параметр Time values задает вектор выходных времен. Параметр Output values задает вектор из амплитуд сигнала в соответствующие выходные времена. Вместе, эти два параметра задают выборку выходной формы волны в точках, измеренных с начала интервала, на котором форма волны повторяется (период сигнала).
По умолчанию обоими параметрами является [0 2] . Эти настройки по умолчанию задают пилообразную форму волны, которая повторяет каждый 2 секунды от запуска симуляции и имеют максимальную амплитуду 2 .
Порты
Вывод
Port_1 — Периодический выходной сигнал
скаляр
Выходной сигнал задан Time values и параметрами Output values, чтобы создать периодический скалярный сигнал.
Типы данных: double
Параметры
Time values — Вектор выходных времен
[0 2] (значение по умолчанию) | вектор
Вектор из строго монотонно увеличивающихся временных стоимостей. Период сгенерированной формы волны является различием последних и первых значений этого параметра.
Программируемое использование
| Параметры блоков: rep_seq_t |
| Ввод: символьный вектор |
| Значения: вектор |
| Значение по умолчанию: [0 2] |
Output values — Вектор из выходных значений
[0 2] (значение по умолчанию) | вектор
Вектор из выходных значений, которые задают выходную форму волны. Каждый элемент соответствует временной стоимости в параметре Time values.
Программируемое использование
| Параметры блоков: rep_seq_y |
| Ввод: символьный вектор |
| Значения: вектор |
| Значение по умолчанию: [0 2] |
Примеры модели

Задайте форму волны с повторяющимся блоком последовательности
Как вы задаете форму волны с блоком Repeating Sequence.

Моделирование отказоустойчивой топливной системы управления
Объедините Stateflow® с Simulink®, чтобы эффективно смоделировать гибридные системы. Этот тип моделирования особенно полезен для систем, которые имеют многочисленные возможные операционные режимы на основе дискретных событий. Традиционный поток сигналов обработан в Simulink, в то время как изменения в настройке управления реализованы в Stateflow. Модель, описанная ниже, представляет топливную систему управления для бензинового двигателя. Система очень устойчива в том отдельном датчике, отказы обнаруживаются, и система управления динамически реконфигурирована для непрерывной операции.

Две модели гидроцилиндра с ограничениями загрузки
Смоделируйте твердый стержень, поддерживающий большую массу, соединяющую два гидравлических привода. Модель устраняет пружины, когда она прикладывает поршневые силы непосредственно к загрузке. Эти силы балансируют гравитационную силу и приводят и к линейному и к вращательному смещению.

Симуляция систем с переменными транспортными явлениями задержки
Два случая, где можно использовать Simulink®, чтобы смоделировать переменные транспортные явления задержки.
Характеристики блока
Типы данных
Прямое сквозное соединение
Многомерные сигналы
Сигналы переменного размера
Обнаружение пересечения нулем
Алгоритмы
Блок устанавливает входной период как различие между первым и последним значением параметра Time values. Выход в любое время t выход во время t = t-n*period , где n целое число. Последовательность повторяется в t = n*period . Блок использует линейную интерполяцию, чтобы вычислить значение формы волны между выходными временами, которые вы задаете.
Расширенные возможности
Генерация кода C/C++
Генерация кода C и C++ с помощью Simulink® Coder™.
Не рекомендуемый для производственного кода.
Рассмотрите использование Repeating Sequence Stair или блоков Repeating Sequence Interpolated для генерации кода.
Смотрите также
Представлено до R2006a
Документация Simulink
- Примеры
- Блоки и другая ссылка
- Информация о релизах
- PDF-документация
Поддержка
- MATLAB Answers
- Помощь в установке
- Отчеты об ошибках
- Требования к продукту
- Загрузка программного обеспечения
© 1994-2021 The MathWorks, Inc.
- Условия использования
- Патенты
- Торговые марки
- Список благодарностей
Для просмотра документации необходимо авторизоваться на сайте
Войти
Памятка переводчика
1. Если смысл перевода понятен, то лучше оставьте как есть и не придирайтесь к словам, синонимам и тому подобному. О вкусах не спорим.
2. Не дополняйте перевод комментариями “от себя”. В исправлении не должно появляться дополнительных смыслов и комментариев, отсутствующих в оригинале. Такие правки не получится интегрировать в алгоритме автоматического перевода.
3. Сохраняйте структуру оригинального текста — например, не разбивайте одно предложение на два.
4. Не имеет смысла однотипное исправление перевода какого-то термина во всех предложениях. Исправляйте только в одном месте. Когда Вашу правку одобрят, это исправление будет алгоритмически распространено и на другие части документации.
5. По иным вопросам, например если надо исправить заблокированное для перевода слово, обратитесь к редакторам через форму технической поддержки.
Repeating sequence simulink как работает
Generate an arbitrarily shaped periodic signal
The Repeating Sequence block outputs a periodic scalar signal having a waveform that you specify. You can specify any waveform, using the block dialog’s Time values and Output values parameters. The Times value parameter specifies a vector of sample times. The Output values parameter specifies a vector of signal amplitudes at the corresponding sample times. Together, the two parameters specify a sampling of the output waveform at points measured from the beginning of the interval over which the waveform repeats (i.e., the signal’s period). For example, by default, the Time values and Output values parameters are both set to [0 2] . This default setting specifies a sawtooth waveform that repeats every 2 seconds from the start of the simulation and has a maximum amplitude of 2 . The Repeating Sequence block uses linear interpolation to compute the value of the waveform between the specified sample points.
Data Type Support
A Repeating Sequence block outputs real signals of type double .
Parameters and Dialog Box
Time values A vector of monotonically increasing time values. The default is [0 2] . Output values A vector of output values. Each corresponds to the time value in the same column. The default is [0 2] .
Characteristics
| Relay | Reshape |
Документация
Simulink ® блоки позволяют вам указывать диапазон допустимых значений для их выходных сигналов. Определение диапазонов сигнала помогает вам оптимизировать типы данных и улучшить сгенерированный код.
Если у вас есть Embedded Coder ® , Simulink Coder™ может оптимизировать код, который вы генерируете из модели путем принятия во внимание минимальных и максимальных значений, которые вы задаете для сигналов и параметров. Эта оптимизация может удалить алгоритмический код и влиять на результаты некоторых режимов симуляции, такие как SIL или режим external mode. Для получения дополнительной информации смотрите, Оптимизируют использование заданных минимальных и максимальных значений (Embedded Coder) .
Блоки, которые позволяют спецификацию диапазона сигнала
Следующие блоки позволяют вам указывать диапазоны для своих выходных сигналов:
- Abs
- Constant
- Data Store Memory
- Data Type Conversion
- Difference
- Discrete Derivative
- Discrete-Time Integrator
- Gain
- In Bus Element
- Inport
- Interpolation Using Prelookup
- 1-D Lookup Table
- 2-D Lookup Table
- n-D Lookup Table
- Math Function
- MinMax
- Multiport Switch
- Out Bus Element
- Outport
- Product , Divide , Product of Elements
- Relay
- Repeating Sequence Interpolated
- Repeating Sequence Stair
- Saturation
- Saturation Dynamic
- Signal Specification
- Sum , Add , Subtract , Sum of Elements
- Switch
Работа с диапазонами сигнала в блоках
Чтобы указать диапазоны сигнала для большинства блоков, используйте Output minimum и параметры Output maximum блока, чтобы указать диапазон допустимых значений для выходного сигнала блока. Исключения включают Data Store Memory , Inport , In Bus Element , Outport , Out Bus Element и блоки Signal Specification , для которых вы используете их Minimum и параметры Maximum, чтобы указать диапазон сигнала. Смотрите Блоки, Которые Позволяют Спецификацию Диапазона сигнала для списка применимых блоков.
Чтобы получить доступ к этим параметрам, используйте Property Inspector (на вкладке Modeling, под Design, нажмите Property Inspector), Model Data Editor (на вкладке Modeling, нажмите Model Data Editor), или диалоговое окно блока.
Задайте минимум или максимум как выражение, которое оценивает к скаляру, вещественному числу с double тип данных. Например, можно использовать:
- Литеральный номер, такой как 98.884 . Неявно, типом данных является double .
- Числовая переменная рабочей области (см. Значения Параметров блоков Доли и Повторного использования путем Создания Переменных), чьим типом данных является double . Используйте этот метод, чтобы совместно использовать минимальное или максимальное значение между несколькими элементами данных. Когда вы используете переменную, чтобы установить Min или Max свойство Simulink.ValueType , Simulink.Signal , или Simulink.BusElement объект, текущее значение переменной присвоено объекту. Min и Max свойства объекта не затронуты будущими изменениями в переменной.
Скалярное значение, которое вы задаете, применяется к каждому элементу составного сигнала (например, когда сигнал является нескалярным или шина). Для получения информации о скалярном расширении смотрите Скалярное Расширение Входных параметров и Параметров.
Чтобы оставить минимум или максимум сигнала незаданными, используйте пустой матричный [] , который является значением по умолчанию.
Укажите диапазоны для моделирования построений
Если вы используете построения моделирования, такие как шины, хранилища данных и Stateflow ® графики, можно использовать различные методы, чтобы указать информацию области значений проекта. Используйте информацию в таблице.
Численно комплексный сигнал
Когда вы задаете Output minimum или Output maximum для сигнала, который является численно комплексным, заданные минимальные и максимальные значения применяются отдельно к действительной части и к мнимой части комплексного числа. Если значение или части номера меньше минимума, или больше, чем максимум, комплексное число находится вне заданной области. Никакая проверка диапазона не происходит против никакой комбинации действительных и мнимых частей, таких как (sqrt(a^2+b^2)) .
Элементы сигнала в шине
Если вы собираете шину при помощи блока Bus Creator , можно указать информацию области значений на восходящих блоках, которые питают блок Bus Creator .
Независимо от метода вы используете, чтобы собрать шину, можно создать Simulink.Bus объект и использование это как тип данных шины. В этом случае рассмотрите указывающую информацию области значений при помощи Min и Max свойства Simulink.BusElement объекты, которые находятся в объекте шины. Для получения дополнительной информации смотрите Specify Bus Properties с Типами данных Object Simulink.Bus.
Сигнал в блоке MATLAB Function
Используйте Порты и Менеджер данных, чтобы задать свойства Minimum и Maximum данных. Смотрите Набор Общие Свойства данных.
Сигнал в диаграмме Stateflow
Установите свойства Minimum и Maximum соответствующих данных Stateflow. Смотрите Предельную Область значений (Stateflow) .
Сигнализируйте, что вы сопоставляете с объектом (таким как Simulink.Signal или Simulink.ValueType объект
Установите Min и Max свойства Simulink.Signal или Simulink.ValueType объект.
Хранилище данных (блок Data Store Memory или Simulink.Signal объект
Для блока Data Store Memory , набор Minimum и параметры блоков Maximum. Для объекта сигнала, набор Min и Max свойства.
Диагностируйте ошибки диапазона сигнала
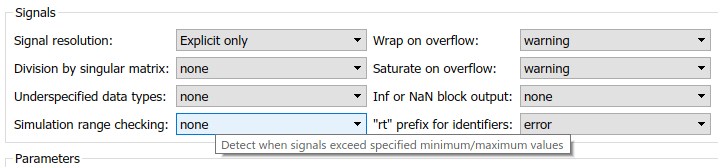
Simulink обеспечивает диагностику под названием Simulation range checking, который можно включить, чтобы обнаружить, когда сигналы превышают свои заданные области в процессе моделирования. Когда включено, Simulink сравнивает значения сигналов что блок выходные параметры с обоими заданная область (см. работу с Диапазонами сигнала в Блоках), и тип данных блока. Таким образом, Simulink выполняет следующую проверку:
DataTypeMin ≤ MinValue ≤ VALUE ≤ MaxValue ≤ DataTypeMax
- DataTypeMin минимальное значение, представимое типом данных блока.
- MinValue минимальное значение, которое блок должен вывести, заданный, например, Output minimum.
- VALUE значение сигналов что блок выходные параметры.
- MaxValue максимальное значение, которое блок должен вывести, заданный, например, Output maximum.
- DataTypeMax максимальное значение, представимое типом данных блока.
Примечание
Возможно чрезмерно определить, как блок обрабатывает сигналы, которые превышают конкретные области значений. Например, можно задать значения (кроме значений по умолчанию) и для параметров диапазона сигнала и включить параметр Saturate on integer overflow. В этом случае Simulink отображает предупреждающее сообщение, которое советует вам отключать параметр Saturate on integer overflow.
Включите проверку диапазона симуляции
Включить диагностику Simulation range checking:
- В вашем окне модели, на вкладке Modeling, нажимают Model Settings. Simulink отображает диалоговое окно Configuration Parameters.
- В дереве Select на левой стороне диалогового окна Configuration Parameters нажмите Diagnostics> категория Data Validity. На правой стороне под Signals, набор диагностика Simulation range checking к error или warning .
Смотрите проверку диапазона Симуляции для получения дополнительной информации.
Симулируйте модели с проверкой диапазона симуляции
Проверять на ошибки диапазона сигнала или предупреждения:
- Включите диагностику Simulation range checking для своей модели (см., Включают Проверку диапазона Симуляции).
- В вашем окне модели нажмите Run, чтобы симулировать модель. Simulink симулирует вашу модель и выполняет проверку диапазона сигнала. Если сигнал превышает свою заданную область, когда диагностика Simulation range checking задает error , Simulink останавливает симуляцию и генерирует ошибку (например, в Диагностическом Средстве просмотра). В противном случае, если сигнал превышает свою заданную область, когда диагностика Simulation range checking задает warning , Simulink генерирует предупреждающее сообщение в MATLAB ® Командное окно. Каждое сообщение идентифицирует блок, выходной сигнал которого превышает свою заданную область и временной шаг, на котором происходит это нарушение.
Распространение диапазона сигнала для виртуальных блоков
Некоторые виртуальные блоки (см. Невиртуальные и Виртуальные Блоки) позволяют вам указывать диапазоны для своих выходных сигналов, например, Inport и блоков Outport . Когда диагностика Simulation range checking включена для модели, которая содержит такие блоки, диапазон сигнала виртуального блока распространяет назад к первой инстанции невиртуального блока, выходной сигнал которого это получает. Если невиртуальный блок задает различные значения для своей собственной области значений, Simulink выполняет диапазон сигнала, сверяющийся с возможной областью значений tightest. Таким образом, Simulink Check сигнал с помощью большего минимального значения и меньшего максимального значения.
Например, рассмотрите следующую модель:
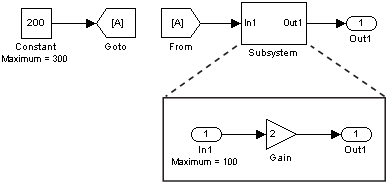
В этой модели блок Constant задает свой параметр Output maximum как 300, и тот из блока Inport установлен в 100. Предположим, что вы включаете диагностику Simulation range checking и симулируете модель. Блок Inport назад распространяет свое максимальное значение с невиртуальным блоком, который предшествует ему, т.е. блок Constant . Simulink затем использует меньшие из этих двух максимальных значений, чтобы проверять сигнал что блок Constant выходные параметры. Поскольку блок Constant выводит сигнал, значение которого (200) превышает самую трудную область значений, Simulink генерирует ошибку.
Неожиданные ошибки или предупреждения для данных с большей точностью или областью значений, чем double
Когда элемент данных (сигнал или параметр) использует тип данных кроме double , перед сравнением Simulink бросает элемент данных и каждый предел проекта (минимальное или максимальное значение, которое вы задаете) к недвойному типу данных. Этот метод помогает предотвратить генерацию ненужных, вводящих в заблуждение ошибок и предупреждения.
Однако Simulink хранит пределы проекта как double перед сравнением. Если тип данных элемента данных имеет более высокую точность, чем double (например, тип данных с фиксированной точкой с 128-битным размером слова и 126-битной дробной длиной) или большая область значений, чем double , и double не может точно представлять значение предела проекта, Simulink может сгенерировать неожиданные предупреждения и ошибки.
Если недвойной тип имеет более высокую точность, рассмотрите округление предела проекта следующему номеру дальше всего от нуля что double может представлять. Например, предположите, что сигнал генерирует ошибку после того, как вы устанавливаете максимальное значение к 98.8847692348509014 . В командной строке вычислите следующий номер дальше всего от нуля что double может представлять.
format long 98.8847692348509014 + eps(98.8847692348509014)
ans = 98.884769234850921
Repeating Sequence
Блок Repeating Sequence выводит периодический скалярный сигнал, имеющий форму волны, которую вы задаете, используя параметры Time values и Output values. Параметр Time values задает вектор времени выхода. Параметр Output values задает вектор амплитуд сигнала в соответствующие выходы времени. Вместе эти два параметра определяют дискретизацию выхода сигнала в точках, измеренных с начала интервала, через который повторяется форма волны (период сигнала).
По умолчанию оба параметра [0 2] . Эти настройки по умолчанию задают пилообразную форму волны, которая повторяет каждую 2 секунд от начала симуляции и имеет максимальную амплитуду 2 .
Порты
Выход
Port_1 — Периодический выходной сигнал
скаляр
Выходной сигнал, заданный параметрами Time values и Output values, для создания периодического скалярного сигнала.
Типы данных: double
Параметры
Time values — Вектор выхода
[0 2] (по умолчанию) | вектор
Вектор строго монотонно увеличивающихся значений времени. Период сгенерированной формы волны является различием последнего и первого значений этого параметра.
Программное использование
| Параметры блоков: rep_seq_t |
| Тип: Вектор символов |
| Значения: вектор |
| По умолчанию: [0 2] |
Output values — Вектор выходных значений
[0 2] (по умолчанию) | вектор
Вектор выхода значений, которые задают выход сигнал. Каждый элемент соответствует значению времени в параметре Time values.
Программное использование
| Параметры блоков: rep_seq_y |
| Тип: Вектор символов |
| Значения: вектор |
| По умолчанию: [0 2] |
Примеры моделей

Задайте форму волны с повторяющимся блоком последовательности
Как вы задаете форму волны с блоком Repeating Sequence.

Моделирование отказоустойчивой системы управления топливом
Объедините Stateflow ® с Simulink ®, чтобы эффективно моделировать гибридные системы. Этот тип моделирования особенно полезен для систем, которые имеют множество возможных рабочих режимов, основанных на дискретных событиях. Традиционный поток сигналов обрабатывается в Simulink, в то время как изменения в строении управления реализованы в Stateflow. Модель, описанная ниже, представляет систему управления топливом для бензинового двигателя. Система обладает высокой устойчивостью, поскольку обнаруживаются отдельные отказы датчиков, и система управления динамически перенастраивается для бесперебойной операции.

Две Модели гидроцилиндра с ограничениями нагрузки
Моделируйте жесткий стержень, поддерживающий большую массу, соединяющую два гидравлических приводов. Модель устраняет пружины, когда она прикладывает силы поршня непосредственно к нагрузке. Эти силы уравновешивают силу тяжести и приводят как к линейному, так и к вращательному перемещению.

Симуляция систем с переменными явлениями задержки транспорта
Два случая, когда можно использовать Simulink ® для моделирования переменных явлений задержки транспорта.
Характеристики блоков
Типы данных
Прямое сквозное соединение
Многомерные сигналы
Сигналы переменного размера
Обнаружение пересечения нулем
Алгоритмы
Блок устанавливает период входа как различие между первым и последним значением параметра Time values. Выход в любой момент t является выход в то время t = t-n*period , где n — целое число. Последовательность повторяется t = n*period . Блок использует линейную интерполяцию, чтобы вычислить значение формы волны между выходами, которые вы задаете.
Расширенные возможности
Генерация кода C/C + +
Сгенерируйте код C и C++ с помощью Coder™ Simulink ®
Не рекомендуемый для производственного кода.
Рассмотрите использование Repeating Sequence Stair или Repeating Sequence Interpolated блоков для генерации кода.
См. также
Представлено до R2006a
Документация Simulink
- Примеры
- Блоки и другая ссылка
- Примечания к выпуску
- PDF-документация
Поддержка
- MATLAB Answers
- Помощь в установке
- Отчеты об ошибках
- Требования к продукту
- Загрузки программного обеспечения
© 1994-2021 The MathWorks, Inc.
- Условия использования
- Патенты
- Торговые марки
- Список благодарностей
Для просмотра документации необходимо авторизоваться на сайте
Войти
Памятка переводчика
1. Если смысл перевода понятен, то лучше оставьте как есть и не придирайтесь к словам, синонимам и тому подобному. О вкусах не спорим.
2. Не дополняйте перевод комментариями “от себя”. В исправлении не должно появляться дополнительных смыслов и комментариев, отсутствующих в оригинале. Такие правки не получится интегрировать в алгоритме автоматического перевода.
3. Сохраняйте структуру оригинального текста — например, не разбивайте одно предложение на два.
4. Не имеет смысла однотипное исправление перевода какого-то термина во всех предложениях. Исправляйте только в одном месте. Когда Вашу правку одобрят, это исправление будет алгоритмически распространено и на другие части документации.
5. По иным вопросам, например если надо исправить заблокированное для перевода слово, обратитесь к редакторам через форму технической поддержки.