От чего зависит частота вращения магнитного поля
Requested virtual server does not exist or temporarily unavailable.
Возможные причины ошибки:
Possible causes of error :
-
Сервер, на котором размещён данный ресурс перегружен;
The server is overloaded;
The virtual server has been incorrectly configured;
Service for requested resource is suspended;
Свяжитесь с нами для получения подробной информации. Контакты
Contact us for more information. Our contacts
Асинхронный генератор. Частота
Частота асинхронного генератора при холостом ходе и нагрузке
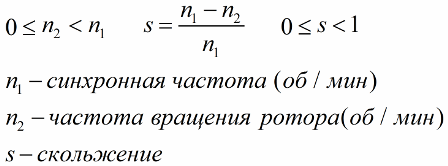
Разница между частотой вращения магнитного поля и ротора в асинхронных генераторах определяется коэффициентом s, называемым скольжением, который выражается соотношением:
Здесь:
n — частота вращения магнитного поля.
nr — частота вращения ротора.
Связь между угловой частотой вращения магнитного поля ω и угловой частотой вращения ротора ωr асинхронной машины можно выразить следующим образом:
что следует из определения скольжения.
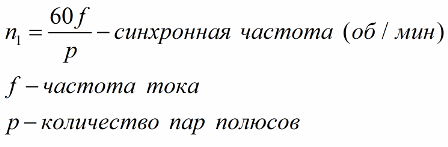
В общем случае угловая частота вращения магнитного поля
Так как частота генерируемых колебаний
где р — число пар полюсов, то
Аналогично угловая частота вращения ротора
где fr = pnr — электрическая частота вращения ротора.
Электрическая угловая частота вращения ротора
В режиме автономного асинхронного генератора частота вращения магнитного поля, определяющая частоту генерируемых колебаний, зависит от частоты вращения ротора и от нагрузки, характеризуемой скольжением. Если нагрузка отсутствует, а включенная емкость и частота вращения ротора остаются постоянными, т.е. C = cоnst и ωr = cоnst, то частоту генерируемых колебаний можно выразить через параметры колебательного контура, который образуется собственной индуктивностью статорной обмотки и емкостью конденсатора.
При отмеченных условиях уравнение электрического равновесия, выраженное через мгновенные значения напряжений на синхронном индуктивном сопротивлении XL = ωL и на конденсаторе XC = ωC, принимает вид:
uL = Ldi/dt и di/dt = C d 2 u/dt 2
и преобразований, уравнение примет вид
Примем, что напряжение на конденсаторе изменяется по синусоидальному закону:
d 2 uC /dt 2 = -ω 2 UC sinωt ,
С учетом последних соотношений из дифференциального уравнения находим:
ω = 1/√LC ,
f = 1/2π√LC
Таким образом, частота генерируемых колебаний при холостом ходе автономного асинхронного генератора определяется из условия резонанса емкости конденсатора и собственной индуктивности обмотки статора.
Если принять, что при холостом ходе скольжение s = 0, то получим
Последнее выражение можно представить в виде
Следовательно, при холостом ходе асинхронного самовозбуждающегося генератора параметры колебательного контура автоматически настраиваются на частоту, равную электрической частоте вращения ротора.
Изменение значения включенной емкости при ωr = cоnst или частоты вращения ротора при С = cоnst не нарушает вышеописанных равенств, если генератор остается в области устойчивой работы. В первом случае мы имеем одну характеристику намагничивания машины, соответствующую данному значению частоты вращения и семейство вольтамперных характеристик возбуждающей емкости, причем каждая из характеристик составляет с положительным направлением оси абсцисс угол
где k = 1, 2, 3 . Произведение собственных индуктивностей статорной обмотки и емкости конденсаторов остается практически постоянным, т.е.
так как вследствие нелинейности кривой намагничивания происходит соответствующее изменение индуктивности. Так с увеличением емкости ток холостого хода и степень насыщения магнитной цепи возрастают, а индуктивность уменьшается. Значение установившегося напряжения определяется точкой пересечения кривой намагничивания и вольтамперной характеристики конденсаторов.
Во втором случае, т.е. при переходе к новым значениям установившихся частот вращения с емкостью С = cоnst, мы имеем семейство кривых намагничивания и семейство вольтамперных характеристик возбуждающей емкости. Углы наклона последних к положительному направлению оси абсцисс находятся теперь по соотношению
Значение установившегося напряжения в каждом случае определяется точкой пересечения кривой намагничивания и вольтампер ной характеристики конденсаторов для данной угловой частоты ωk .
Получим теперь выражение для частоты генерируемых колебаний при нагрузке, полагая, что емкость конденсаторов и частота вращения ротора не изменяются. Выполнив необходимые преобразования из вышеописанных формул, получим:
f = pnr /(1 — s ) ,
Заметим, что частота вращения ротора в большинстве случаев выражается в об/мин а не в сек/мин, тогда запишем
f = pnr /60(1 — s ) ,
Частота генерируемых колебаний при постоянной частоте вращения ротора и возрастающей нагрузке несколько уменьшается, так как на устойчивой части механической характеристики асинхронной машины скольжение пропорционально нагрузке. С другой стороны, уменьшение частоты f при С = cоnst объясняется увеличением собственной индуктивности фазы статора вследствие возрастания коэффициента взаимоиндукции. Последнее вызывается размагничивающим действием тока ротора.
Замечания и предложения принимаются и приветствуются!
Все о частотных преобразователях
Частотные преобразователи — это устройства для плавного изменения частоты вращения синхронных и асинхронных двигателей посредством изменения частоты питающего тока.
В современной технике благодаря простоте конструкции и обслуживания, небольшим габаритам, высокой надёжности, и низкой стоимости огромное распространение получили именно асинхронные электродвигатели.
При работе различных устройств, в качестве привода которых применяются асинхронные электродвигатели, часто возникает необходимость в регулировании их скорости вращения.
Исходя из формулы n = (1 — S)60f/p где n — скорость вращения ротора, S — скольжение, f — частота питающей сети, p — количество пар полюсов.
Существует три способа регулирования скорости вращения асинхронного двигателя:
- — изменение скольжения. Этот способ используется в двигателях с фазным ротором. В цепь фазного ротора вводится регулировочный реостат. При использовании этого способа можно получить большой диапазон регулирования частоты вращения в сторону понижения. Однако этот способ имеет, и ряд недостатков, основным из которых является большие потери на регулировочном реостате (нагрев) т.е. снижение КПД. Как следствие этот способ применяют для кратковременного снижения частоты вращения.
- — изменение числа пар полюсов. Этот способ предполагает использование специальных двигателей (многоскоростных) имеющих более сложную обмотку статора, позволяющую изменять число пар полюсов, и короткозамкнутый ротор. Недостатком этого метода является ступенчатое регулирование (3000, 1500, 1000, 750, 600 об/мин – 1,2,3,4,5 обмотки с 1,2,3,4,5 парами полюсов соответственно), большая стоимость и громоздкость двигателя.
- — изменение частоты питающего тока (напряжения). На практике этот метод, в общем случае (самый простой), предполагает вместе с частотой изменять и действующее значение подведенного напряжения таким образом, что бы отношение U/f было постоянно. Это (изменение входного напряжения) делается для сохранения перегрузочной способности двигателя с изменением частоты сети.
В приводах центробежных насосов и вентиляторов, которые являются типичными представителями переменной механической нагрузки (момент нагрузки возрастает с увеличением скорости вращения) используется функция напряжения к квадрату частоты U/f 2 = сonst.
В более совершенных частотных регуляторах для управления скоростью вращения и электромагнитным моментом двигателя независимо, используется так называемое векторное управление. При этом виде управления необходимо управлять амплитудой и фазой статорного тока (т.е. вектором) в зависимости от положения ротора относительно обмотки статора в каждый момент времени.
Применение частотных регуляторов. Зачем нужен частотный регулятор?
Асинхронные двигатели имеют ряд недостатков (сложность регулирования скорости вращения, большие пусковые токи, относительно малый пусковой момент). Однако благодаря своей простоте, надежности и дешевизне получили огромное распространение в промышленности и быту. Применение же частотных регуляторов «устраняет» недостатки асинхронных двигателей и кроме этого позволяет избежать установки различного дополнительного оборудования, уменьшить потери в технологическом процессе, увеличить КПД самого двигателя, уменьшить износ, как самого двигателя, так и оборудования использующегося в данном технологическом процессе.
Рассмотрим более детально применение частотных регуляторов на примере насосного оборудования. Потери в технологической системе зависят от нагрузки создаваемой потребителями (на неё мы влиять не можем) и гидравлическим сопротивлением элементов этой системы. Так поддержание давления у потребителей на постоянном уровне при изменяющейся нагрузке, возможно только при использовании дополнительного оборудования (различных регуляторов давления, мембранных баков, дроссельных задвижек). Использование этого оборудования создает дополнительное гидравлическое сопротивление и как следствие снижает КПД системы в целом. При использовании частотного регулятора двигатель сам регулирует давление в сети посредством изменения частоты вращения. Кроме того при снижении технологической нагрузки уменьшая частоту вращения насоса, КПД самого насоса тоже возрастает. Таким образом достигается как бы двойной эффект увеличивается КПД системы в целом, за счёт исключения из системы лишнего гидравлического сопротивления и увеличение КПД самого насоса как агрегата.
Применение частотного регулятора также значительно снижает эксплуатационные затраты связанные с износом оборудования. Плавное регулирование вращения (и плавный пуск) практически полностью позволяют избежать как гидравлических ударов, так и скачков напряжения в электросети (особенно актуально в системах, где предусмотрен частый пуск/остановка насоса).
Что такое синхронное вращение
Частота вращения ротора, при которой работает асинхронный электродвигатель, зависит от частоты питающего напряжения, от мощности текущей нагрузки на валу, и от числа электромагнитных полюсов данного двигателя. Эта реальная частота вращения (или рабочая частота) всегда меньше так называемой синхронной частоты, которая определяется лишь параметрами источника питания и количеством полюсов обмотки статора данного асинхронного двигателя.
Таким образом, синхронная частота вращения двигател я — это частота вращения магнитного поля обмотки статора при номинальной частоте питающего напряжения, и она несколько отличается от рабочей частоты. В итоге количество оборотов в минуту под нагрузкой всегда меньше так называемых синхронных оборотов.
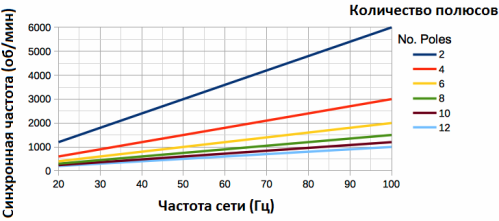
На приведенном рисунке видно, как синхронная частота вращения для асинхронного двигателя с тем или иным количеством полюсов статора зависит от частоты питающего напряжения: чем выше частота — тем выше угловая скорость вращения магнитного поля. Так например в частотно-регулируемых приводах меняя частоту питающего напряжения изменяют синхронную частоту двигателя. При этом изменяется и рабочая частота вращения ротора двигателя под нагрузкой.
Обычно обмотку статора асинхронного двигателя питают трехфазным переменным током, который и создает вращающееся магнитное поле. И чем больше пар полюсов — тем меньшей будет синхронная частота вращения — частота вращения магнитного поля статора.
Большинство современных асинхронных двигателей имеют от 1 до 3 пар магнитных полюсов, в редких случаях 4, ведь чем больше полюсов — тем ниже КПД асинхронного двигателя. Однако при меньшем количестве полюсов скорость вращения ротора можно менять очень-очень плавно, изменяя частоту питающего напряжения.
Как уже было отмечено выше, реальная рабочая частота асинхронного двигателя отличается от его синхронной частоты. Почему так происходит? Когда ротор вращается с частотой меньшей чем синхронная, то проводники ротора пересекают магнитное поле статора с некоторой скоростью и в них наводится ЭДС. Эта ЭДС создает токи в замкнутых проводниках ротора, в результате данные токи взаимодействуют с вращающимся магнитным полем статора, и возникает крутящий момент — ротор увлекается магнитным полем статора.

Если момент имеет достаточную величину чтобы преодолеть силы трения, то ротор начинает вращаться, при этом момент электромагнитный равен тормозящему моменту, который создают нагрузка, силы трения и т. д.
При этом ротор все время отстает от магнитного поля статора, не может рабочая частота достичь синхронной частоты, так как если бы это произошло, то в проводниках ротора перестала бы наводиться ЭДС, и вращающий момент просто не появится. В итоге, для двигательного режима вводят величину «скольжение» (скольжение s, как правило, составляет 2-8%), в связи с чем справедливо и следующее неравенство двигателя:
Но если ротор того же асинхронного двигателя раскрутить при помощи какого-нибудь внешнего привода, например двигателем внутреннего сгорания, до такой скорости, что частота вращения ротора превысит синхронную частоту, то ЭДС в проводниках ротора и активный ток в них приобретут определенное направление, и асинхронный двигатель превратится в генератор.
Общий электромагнитный момент окажется тормозящим, скольжение s станет отрицательным. Но чтобы генераторный режим смог проявить себя, необходимо поставить асинхронному двигателю реактивную мощность, которая бы создавала магнитное поле статора. В момент старта такой машины в генераторном режиме может хватить остаточной индукции ротора и конденсаторов, которые подключают к трем фазам обмотки статора, питающей активную нагрузку.
Телеграмм канал для тех, кто каждый день хочет узнавать новое и интересное: Школа для электрика
Если Вам понравилась эта статья, поделитесь ссылкой на неё в социальных сетях. Это сильно поможет развитию нашего сайта!
Не пропустите обновления, подпишитесь на наши соцсети: