Теория управления шаговым двигателем (или как вертеть PTZ камеру)
Настал тот редкий случай, когда в работе программиста микроконтроллеров появилась потребность в математике и даже физике. У меня на работе была интересная задача по теме разработки тяжелой (70кг) PTZ камеры.

Там была задачка по физике из раздела кинематики. Правда по уровню сложности её можно отнести к школьной программе 6го класса.
Шаговые двигатели применяются в CNC станках, 2D/3D принтерах, жестких дисках, сканерах, плоттерах, PTZ камерах, крутилках радарных антенн, турелей, в линейных актюаторах, в стрелочных приборах (аналоговые часы) и может быть еще где-то.
У шаговых двигателей есть одна проблема. Из-за высоких моментов инерции нагрузки шаговые двигатели могут потерять шаги и не отработать команды. Чтобы минимизировать потерю шагов вал шагового двигателя надо раскручивать плавно. Самый простой способ — это использовать трапециевидные профили движения.
Постановка задачи
дано:
Параметр
Пояснение
Units
Угол на который надо повернуть вал шагового двигателя
Максимально возможная угловая частота
Максимальное угловое ускорение
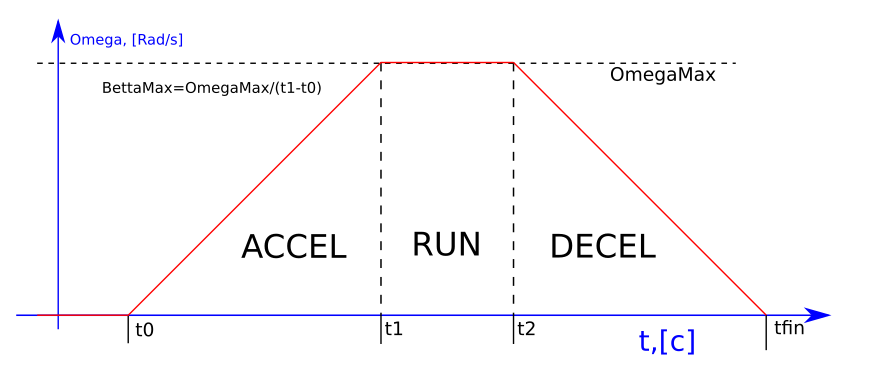
Дан угол, PhiSet на который следует повернуть вал шагового двигателя. Двигатель работает в трех режимах: ускорение ACCEL, работа на постоянной крейсерской скорости RUN, замедление DECEL. Получается трапециевидный профиль скорости.
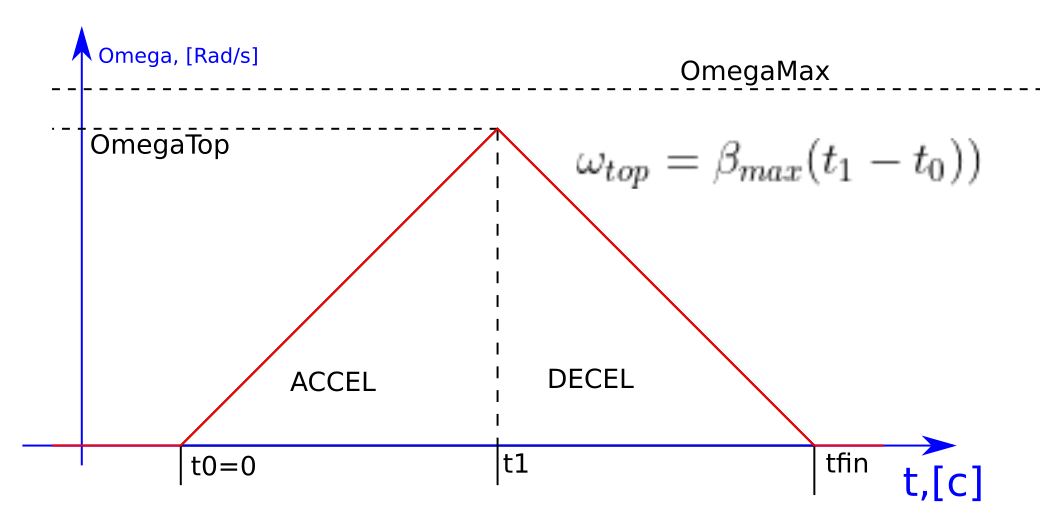
Или ускорение ACCEL и замедление DECEL. Получается треугольный профиль скорости (в случае, если крейсерская скорость OmegaMax очень высока, а угловой путь PhiSet, что надо пройти, очень мал).
В качестве параметров движения даны только ускорение BettaMax [rad/s^2] и крейсерская скорость OmegaMax [rad/s] в режиме RUN. В нулевой момент времени t0 вал трогается с места и начинает набирать угловую скорость Omega с постоянным ускорением BettaMax. Вычислить момент времени t1, при котором следует остановить ускорение ACCEL и начать вращение на постоянной скорости OmegaMax (фаза RUN), и вычислить момент время t2, при котором следует остановить движение на постоянной скорости OmegaMax RUN и начать замедление DECEL.
Примечание
Моменты времени t1 и t2 могут совпадать, если BettaMax очень высоко, а PhiSet мало. Для симметрии и простоты положим, что ускорение во время набора скорости и ускорение во время замедления по модулю равны BettaMax, но противоположны по знаку.
Терминология
Профиль — это график зависимости угловой скорости от времени Omega(t).
Фаза RUN — движение с постоянной скоростью.
Хороший инженер должен не только решить задачу, но и быть способным внятно объяснить доступным языком свое решение коллегам.
Решение
Из кинематики известно, что путь это интеграл скорости по времени. В данном случае интеграл считать нет смысла так как фигуры простецкие: 2 треугольника да прямоугольник.
Первым делом процессор должен решить нужна ли вообще фаза RUN?

Площадь равнобедренного треугольника равна S0. По сути можно сложить квадрат.
Получается что S0
При треугольном профиле получается, что
Треугольный профиль (phi_set
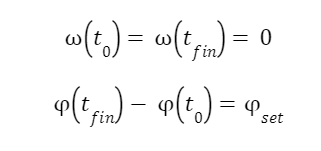
Ок. Как же определить t1(время переключения) в случае треугольного профиля? Надо просто решить данную систему уравнений. Выразить t1. t0 можно обнулить.
Выразив OmegaTop из каждой формулы и приравняв их можно выразить t1. Получается
А теперь случай трапецевидного профиля (S0 < phi_set)
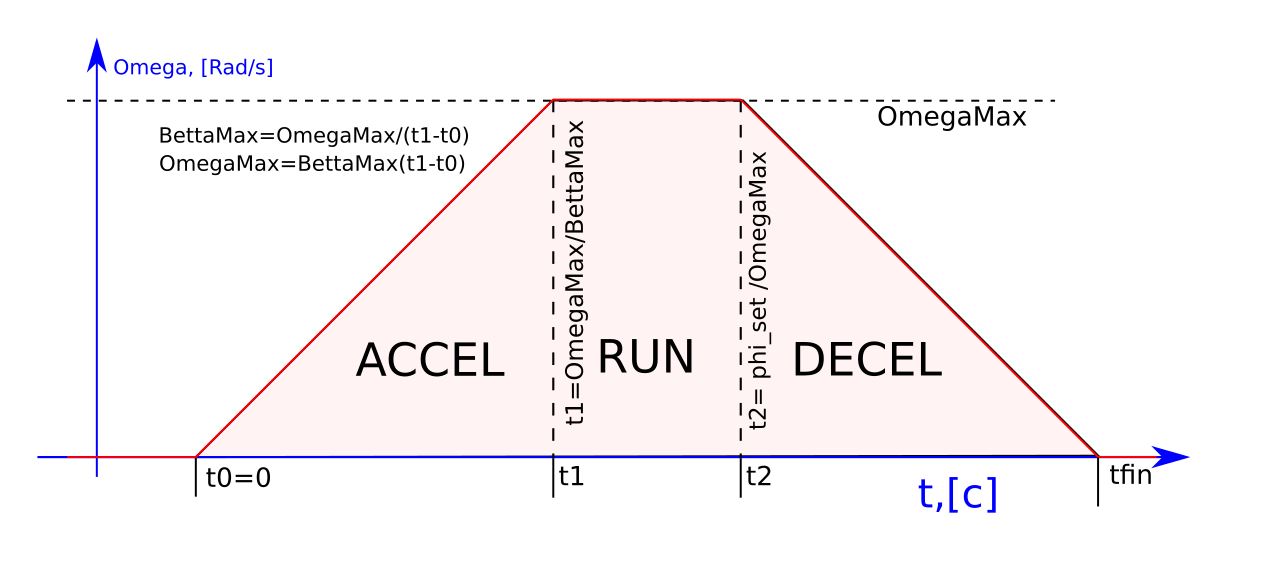
С t1 просто. Из OmegaMax=BettaMax*t1 получаем
В трапецевидном профиле площадь состоит из 2х треугольников и одного прямоугольника
ввиду симметрии получим
Выражаем время включения фазы замедления
Как видите все расчеты был составлен чисто из геометрических соображений (площадь графика ω(t) всегда должна быть равна phi_set ).
Ниже представлен простой алгоритм на языке ДРАКОН, который помогает наглядно показать алгоритм вычисления моментов времени t1 и t2 переключения режимов ACCEL/RUN/DECEL при повороте на угол set в условиях заданной скорости OmegaMax в режиме RUN и допустимого ускорения BettaMax.

Решение на языке MATLAB
function [ t1 t2 tf wlim] = calcTimesF( phi_set, w_max, B_max ) S1=((w_max)^2)/B_max; if(phi_set < S1) %without RUN t1= t2 t1=sqrt(phi_set/B_max); t2=t1; tf=2*t1; wlim = B_max*t1; else %with RUN t1 < t2 t1=w_max/B_max; t2=(phi_set/w_max); tf=t2+t1; wlim = w_max; end end
Эту задачу в реальности надо решать для дискретного движения, так как в реальности имеем дело с шаговым двигателем. Там заметно усложняется решение. В изменении стадии движения (ACCEL, RUN, DECEL ) приходится ориентироваться не по времени, как в непрерывной постановке, а по пройденному пути (количеству сделанных шагов шагового двигателя). Так как MCU(шка) отлично считает количество положительных фронтов на проводе STEP. Плюс нужна реализация функции квадратного корня на уровне прошивки. Про это есть публикация Asynchronous Control System for Stepper Motor With an Incremental Encoder Feedback.
Вывод
Как видите обыкновенной школьной математики вполне достаточно, чтобы решать реальные оценочные задачи из prod(a) станкостроения.
При расчетах всегда на каждом шаге проверяйте размерность в формулах.
Если вы программируете микроконтроллеры и вам приходилось прибегать к математике, то пишите это в комментариях.
Акроним
расшифровка
Шаговый двигатель с ручным управлением в качестве мотора
Описание Шаговый двигатель с ручным управлением в качестве мотора
Если в качестве двигателя использовать шаговый двигатель, то можно упростить систему управления и отказаться от микроконтроллера. Это готовая сборка блоков, для простого способа ручного управления четырехполюсным шаговым двигателем. Шаговый двигатель является надежным мотором рассчитанным на продолжительную работу, у него отсутствует щеточный узел и он может заменить коллекторные моторы в схемах низкооборотистых приводов, Устройство состоит из шагового мотора, драйвера и блока регулятора выдающего импульсы. Они передаются на драйвер, который вращает шаговый двигатель как обычный мотор редуктор, регулировку оборотов производят переменным резистором, а направление вращения переключателем. На драйвере имеются грубые настройки параметров работы. Схема позволяет управлять шаговых двигателей (однополярный или биполярный) вручную, с помощью регулятора оборотов, без использования контроллера или компьютера, поэтому никакого программирования не требуется.
Напряжение питания: 9-12 вольт. ток 1-3 ампера.
Преимущества и недостатки шагового электродвигателя
К преимуществам эксплуатации шагового двигателя можно отнести:
В шаговых электродвигателях угол поворота соответствует числу поданных электрических сигналов, при этом, после остановки вращения сохраняется полный момент и фиксация;
Точное позиционирование – обеспечивает 3 – 5% от установленного шага, которая не накапливается от шага к шагу;
Обеспечивает высокую скорость старта, реверса, остановки;
Отличается высокой надежностью за счет отсутствия трущихся компонентов для токосъема, в отличии от коллекторных двигателей;
Для позиционирования шаговому двигателю не требуется обратной связи;
Может выдавать низкие обороты для непосредственно подведенной нагрузки без каких-либо редукторов;
Сравнительно меньшая стоимость относительно тех же сервоприводов;
Обеспечивается широкий диапазон управления скоростью оборотов вала за счет изменения частоты электрических импульсов.
К недостаткам применения шагового двигателя относятся:
Может возникать резонансный эффект и проскальзывание шагового агрегата;
Существует вероятность утраты контроля из-за отсутствия обратной связи;
Количество расходуемой электроэнергии не зависит от наличия или отсутствия нагрузки.
Использование шагового двигателя как обычного мотора:
Шаговый двигатель это устройство, которое преобразует электрические импульсы в дискретные, механические перемещения. Шаговый двигатель практически ничем не отличается от двигателей других типов. Шаговые двигателя в настоящее время широко применяются в качестве приводов в принтерах, сканерах, DVD-проигрывателях и многих других . В случае выхода из строя такого прибора, из него можно извлечь шаговый мотор и применить его по другому подходящему назначению, без применения электронного управления.
С этим товаром смотрят
Панель управления шаговым двигателем своими руками.

Управление шаговым двигателем очень популярная и интересная тема. Мне часто поступают заказы по разработке станков и различных устройств с использованием шаговых двигателей. Для управления шаговым двигателем достаточно несколько тактовых кнопок. Но что делать, если требуется устанавливать различные параметры, такие как скорость вращения, ускорение, расстояние перемещения и пр. Можно установить символьный дисплей и энкодер, но данное решение не очень удобное. Лучше всего использовать сенсорный дисплей. Благо, дисплеи компании DWIN стоят недорого.
Собираем панель управления шаговым двигателем своими руками.
Для сборки панели управления шаговым двигателем подготовил все необходимые материалы: прошивка для дисплея DWIN, код для Arduino или ESP32, 3D модель корпуса под дисплей. При желании в корпус можно разместить драйвер шагового двигателя A4988 или другой драйвер данного форм-фактора.
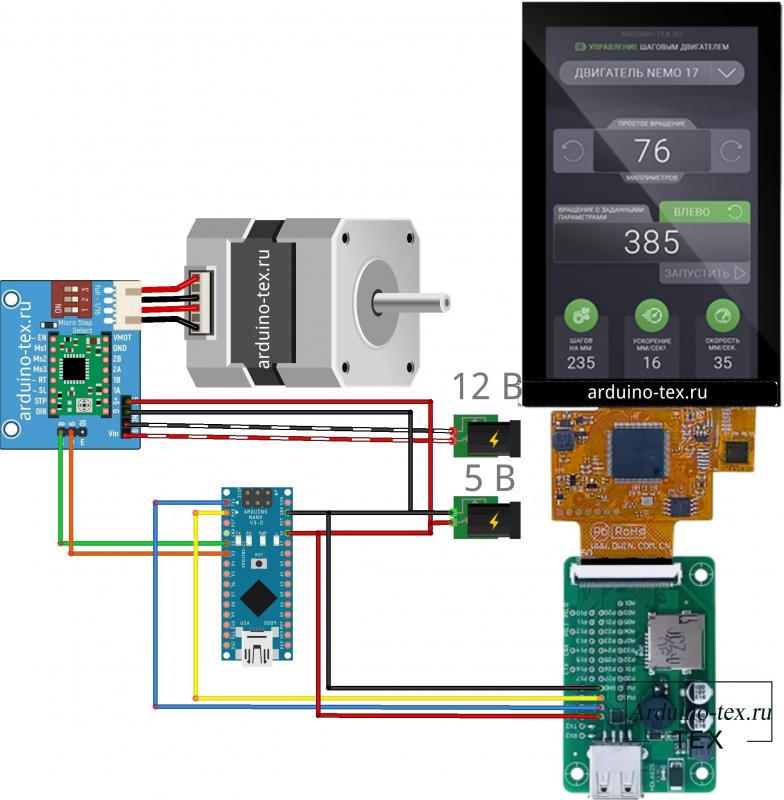
Схема подключения шагового двигателя сенсорного дисплея к Arduino.
Код для Arduino.
Код для данного проекта не требует дополнительных настроек. Загружает его в Arduino, прошивает дисплей. Как прошивать дисплей, я рассказывал в одной из своих статей. Собираем всё по схеме выше. Все дополнительные настройки вы можете сделать прям с дисплея, а именно:
- изменить количество шагов для совершения перемещения на 1 мм.;
- установить скорость шагового двигателя;
- установить ускорение шагового двигателя. И приступить к управлению. Можно вращать по часовой или против часовой стрелки бесконечное количество оборотов или перемещать на заданное расстояние в мм.

Более подробное описание проекта вы можете прочитать на моём втором сайте.
Также смотрите другие проекты с использованием дисплея DWIN:
- Управление реле с помощью сенсорного дисплея DWIN и Arduino, ESP32.
- Панель управления подсветкой на дисплее DWIN.
- Мини-метеостанция на ESP32 (Arduino) и BME280 с выводом данных на дисплей DWIN.
Понравилась новость Панель управления шаговым двигателем своими руками? Не забудь поделиться с друзьями в соц. сетях.
А также подписаться на наш канал на YouTube, вступать в группу Вконтакте, в группу на Facebook.
Понравилась статья? Поделитесь ею с друзьями:
Сигналы управления драйвера ШД: PUL/DIR, STEP/DIR, CW/CCW. Управление шаговыми драйверами DM860H, DM556, TB6600. с Arduino.
ГЛАВНАЯ / КАтегории / Сигналы управления драйвера ШД: PUL/DIR, STEP/DIR, CW/CCW. Управление шаговыми драйверами DM860H, DM556, TB6600. с Arduino.
Общие сведения:
Шаговый двигатель это бесколлекторный двигатель, ротор которого вращается не плавно, а шагами (дискретно). Один оборот ротора (360°) состоит из определённого количества шагов. Количество полных шагов в одном обороте указывается в технической документации двигателя.
Например, ротор шагового двигателя 17HS1352-P4130, за один полный шаг, поворачивается на 1,8°. Значит для поворота ротора на 360° двигатель должен совершить 200 полных шагов.
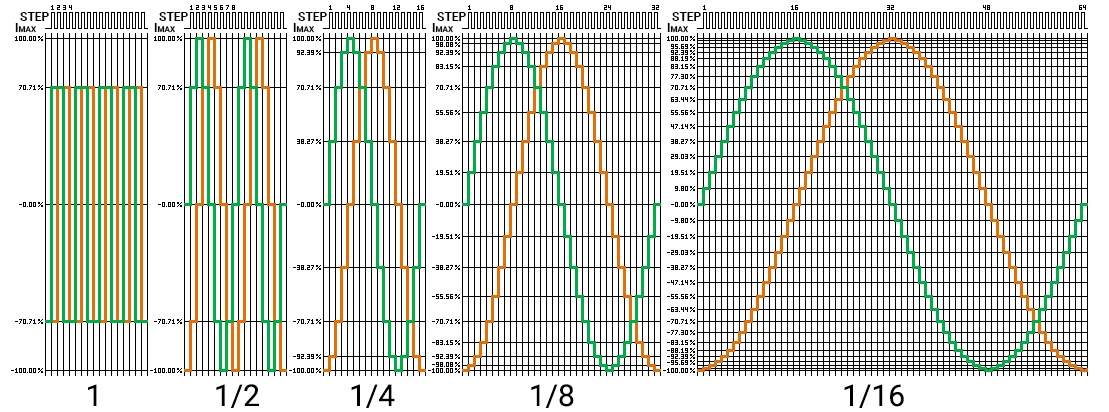
Для совершения одного полного шага на обмотки двигателя поступает серия сигналов от драйвера (как в полношаговом «1», так и в микрошаговых режимах «2», «4», «8», «16»).
С принципом работы шаговых двигателей можно ознакомиться в разделе Wiki - ШД.
Микрошаг:
Большинство драйверов позволяют разделить полный шаг двигателя на несколько микрошагов. Выбор микрошага устанавливается согласно таблице в инструкции к драйверу. В таблице указывается количество микрошагов на полный шаг «Microstep» (1/2/4/8/16/32/. ) и/или количество тактов на полный оборот вала «Pulse/rev» (200/400/800/1600/3200/6400/. ).
Если для целого поворота ротора двигателя в режиме 1 микрошаг на полный шаг требуется 200 тактов, то в режиме 4 микрошага на полный шаг, потребуется уже 800 тактов.
Чем больше микрошагов в полном шаге, тем точнее и плавнее поворачивается ротор шагового двигателя, но для поддержания той же скорости, требуется увеличивать частоту следования тактовых импульсов.
Ограничение тока фазы:
Большинство драйверов позволяют ограничить ток фазы (ток протекающий через обмотки двигателя). Выбор тока фазы осуществляется согласно таблице в инструкции к драйверу. В таблице указывается действующий ток «Current» и/или пиковый ток «PK Current». Чем выше ток, тем выше отдаваемый момент (сила двигателя).
Слишком большой ток приведёт к перегреву двигателя и может вызвать его поломку, а слишком маленький может привести к пропуску шагов, или нестабильному вращению ротора.
У некоторых драйверов ограничение тока осуществляется поворотом потенциометра.
Ток удержания:
Ток удержания это постоянный ток проходящий через обмотки двигателя, удерживающий вал в неподвижном состоянии. Некоторые драйверы позволяют снизить ток удержания.
Снижение тока удержания приводит к снижению нагрева двигателя при его удержании.
Силовые выводы драйвера:
Силовые выводы используются для подачи напряжения питания шагового двигателя и подключения его обмоток.
- Входы «VCC», «GND» / «+V», «GND» / «AC+», «AC-» - предназначены для получения напряжения питания шагового двигателя.
- Выводы «A+» и «A-» - предназначены для подключения первой обмотки шагового двигателя.
- Выводы «B+» и «B-» - предназначены для подключения второй обмотки шагового двигателя.
Подключение обмоток двигателя к драйверу зависит от количества выводов у двигателя.

Драйверы DM860H, DM556, TB6600 позволяют работать только с биполярными двигателями. Двигатели с 4 выводами подключаются по схеме А. Двигатели с 6 выводами подключаются по схеме Б или В. Двигатели с 8 выводами подключаются по схеме Г или Д.
Запрещается подключать или отключать обмотки двигателя на включенном драйвере!
Сигналы управления STEP/DIR (PUL/DIR):
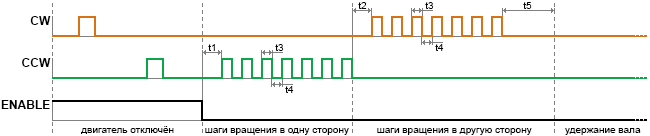
- Вход драйвера «STEP» (он же «PULSE») - предназначен для получения тактовых импульсов. За один импульс ротор двигателя поворачивается на один микрошаг. Вход может работать по фронту или спаду импульса. Чем выше частота импульсов, тем выше скорость вращения ротора.
- Вход драйвера «DIR» - предназначен для выбора направления вращения двигателя («0» - в одну сторону, «1» - в другую сторону). Смена состояния вывода «DIR» должна осуществляться при отсутствии импульсов на выводе «STEP».
- Вход драйвера «ENABLE» - разрешает работу двигателя. У большинства драйверов данный вход является инверсным, работа двигателя разрешена при отсутствии напряжения на входе. Некоторые драйверы позволяют вообще не подключать этот вход. Если работа двигателя запрещена, то его обмотки электрически отключаются и вал двигателя не удерживается.
- Двигатель отключён если на входе «ENABLE» есть напряжение.
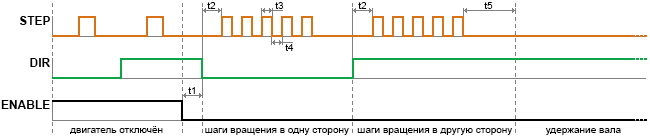
Сигналы на входах «STEP» и «DIR» игнорируются драйвером. Вал двигателя освобождён. - Вал поворачивается на один микрошаг с каждым импульсом на входе «STEP», при условии что на входе «ENABLE» нет напряжения.
Направление поворота вала зависит от состояния на входе «DIR». - Вал двигателя удерживается в неподвижном состоянии если на входе «ENABLE» нет напряжения и на вход «STEP» не подаются импульсы.
- t1: После снятия напряжения со входа «ENABLE» должно пройти не менее 5мкс до изменения уровня на входе «STEP» или «DIR».
- t2: После изменения состояния на входе «DIR» должно пройти не менее 5мкс до подачи импульса на вход «STEP».
- t3, t4: Длительность импульса или паузы на входе «STEP» не должна быть меньше 2,5мкс.
- t5: Автоматическое снижение тока удержания происходит через 1-2 сек после подачи последнего импульса на вход «STEP». Время зависит от типа драйвера.
Сигналы управления CW/CCW:
(Данные сигналы не поддерживаются драйверами DM860H, DM556, TB6600)
- Вход драйвера «CW» - предназначен для получения тактовых импульсов. За один импульс ротор двигателя поворачивается на один микрошаг. Вход может работать по фронту или спаду импульса. Чем выше частота импульсов, тем выше скорость вращения ротора.
- Вход драйвера «CCW» - выполняет те же действия что и вход «CW», но ротор двигателя поворачивается в другую сторону.
- Вход драйвера «ENABLE» - разрешает работу двигателя. У большинства драйверов данный вход является инверсным, работа двигателя разрешена при отсутствии напряжения на входе. Некоторые драйверы позволяют вообще не подключать этот вход. Если работа двигателя запрещена, то его обмотки электрически отключаются и вал двигателя не удерживается.
- Двигатель отключён если на входе «ENABLE» есть напряжение.
Сигналы на входах «CW» и «CCW» игнорируются драйвером. Вал двигателя освобождён. - Вал поворачивается на один микрошаг с каждым импульсом на входе «CW» или «CCW», при условии что на входе «ENABLE» нет напряжения.
Направление поворота вала зависит от того, на какой вход поступают импульсы. - Вал двигателя удерживается в неподвижном состоянии если на входе «ENABLE» нет напряжения и на входы «CW» и «CCW» не подаются импульсы.
- t1: После снятия напряжения со входа «ENABLE» должно пройти не менее 5мкс до подачи импульса на вход «CW» или «CCW».
- t2: После последнего импульса на одном входе должно пройти не менее 5мкс до подачи импульса на дрогой вход.
- t3, t4: Длительность импульса или паузы не должна быть меньше 2,5мкс.
- t5: Автоматическое снижение тока удержания происходит через 1-2 сек после подачи последнего импульса. Время зависит от типа драйвера.
Подключение управляющих выводов драйвера:
Для подключения управляющих выводов можно использовать одну их следующих схем:
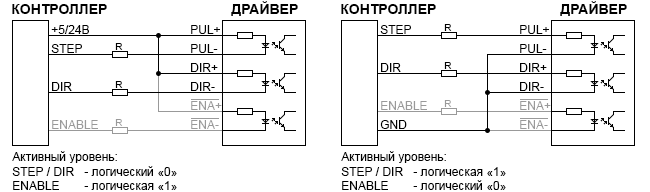
Допускается подключать драйвер к контроллеру без использования сигнала ENABLE, тогда выводы ENA+ и ENA- остаются свободными (не подключёнными).
- При уровне логической «1» = 5В, все сопротивления R исключаются из схемы.
- При уровне логической «1» = 12В, все сопротивления R равны 1кОм.
- При уровне логической «1» = 24В, все сопротивления R равны 2кОм.
Подключение драйвера к Arduino:
Так как логические уровни Arduino UNO равны 5В, то при подключении управляющих выводов к драйверу, ограничивающие сопротивления R не нужны.
Для подключения драйвера к Arduino воспользуемся схемой где выводы PUL-, DIR-, ENA- подключены к GND контроллера (правая схема на картинке выше).
Если подключить драйвер к Arduino без использования сигнала ENABLE, оставив выводы ENA+ и ENA- не подключёнными, то приведённый ниже скетч не сможет освобождать вал. Вал двигателя будет удерживаться всё время, пока он не вращается.
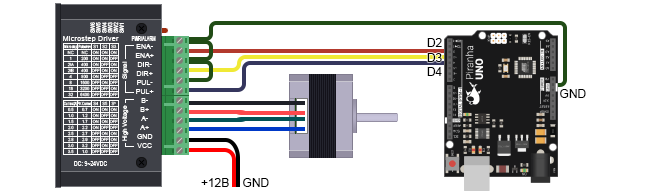
Выводы драйвера ENA+, DIR+ и PUL+ можно подключить к любым выводам Arduino, их номера указываются в начале скетча. В примере это выводы 2, 3 и 4 соответственно.
Если для подключения драйвера воспользоваться схемой где выводы PUL+, DIR+, ENA+ подключены к 5V контроллера (левая схема на картинке выше), то в скетче нужно изменить логические уровни устанавливаемые функциями digitalWrite().
Управление двигателем при помощи Arduino:
Для работы скетча установите микрошаг 1/4, что соответствует 800 тактов на 1 оборот. Микрошаг устанавливается DIP-переключателями драйвера согласно таблице на его корпусе.
Скетч постоянно повторяет 4 действия:
- Поворот вала на 2 полных оборота в одну сторону.
- Остановка двигателя на 5 секунд с удержанием вала.
- Поворот вала на 2 полных оборота в другую сторону.
- Остановка двигателя на 5 секунд с освобождением вала.
const uint8_t pin_ENA = 2; // Вывод Arduino подключённый к входу драйвера ENA+. const uint8_t pin_DIR = 3; // Вывод Arduino подключённый к входу драйвера DIR+. const uint8_t pin_PUL = 4; // Вывод Arduino подключённый к входу драйвера PUL+. // Вывод GND Arduino соединён с входами драйвера ENA-, DIR-, PUL-. uint32_t f = 1000; // Определяем частоту следования микрошагов от 1 до 200'000 Гц. // Чем выше частота, тем выше скорость вращения вала. void setup() < // pinMode( pin_ENA, OUTPUT ); // Конфигурируем вывод Arduino как выход. pinMode( pin_DIR, OUTPUT ); // Конфигурируем вывод Arduino как выход. pinMode( pin_PUL, OUTPUT ); // Конфигурируем вывод Arduino как выход. >// // uint32_t t = 1000000/f/2; // Определяем длительность импульсов t3 и пауз t4 в мкс. // void loop() < // // Готовимся к движению вала: // digitalWrite( pin_ENA, 0 ); // Разрешаем работу двигателя. delayMicroseconds(5); // Выполняем задержку t1 (см. график STEP/DIR). digitalWrite( pin_DIR, 0 ); // Выбираем направление вращения. delayMicroseconds(5); // Выполняем задержку t2 (см. график STEP/DIR). // Поворачиваем вал на 2 оборота: // for(int i=0; i// // Останавливаем вал удерживая его: // Двигатель не вращается, если на вывод PUL не поступают импульсы. delay(5000); // Ждём 5 секунд. В это время двигатель остановлен, его вал удерживается. // Меняем направление движения вала: // digitalWrite( pin_DIR, 1 ); // Меняем логический уровень вывода DIR с 0 на 1. delayMicroseconds(5); // Выполняем задержку t2 (см. график STEP/DIR). // Поворачиваем вал на 2 оборота: // for(int i=0; i // // Останавливаем вал без удержания: // digitalWrite( pin_ENA, 1 ); // Запрещаем работу двигателя, отключаем токи в обмотках. delay(5000); // Ждём 5 секунд. В это время двигатель отключен, его вал свободен. > //
- Движение вала на 2 оборота в одну сторону:
Перед началом движения вала мы разрешаем работу двигателя (установив 0 на выводе ENA) и выбираем направление движения (установив 0 или 1 на вывод DIR), далее выполняем движение подачей импульсов на вывод PUL в теле цикла for. Каждый импульс поворачивает ротор на угол одного микрошага. Микрошаг установлен DIP-переключателями в положение 800 тактов на полный оборот. Код цикла выполняется 1600 раз, значит вал повернётся на 2 оборота. - Остановка вала с удержанием:
Двигатель не вращается, если на вывод PUL не поступают импульсы. Значит обычная задержка на 5000 мс приведёт к остановке двигателя на 5 секунд. Так как работа двигателя была разрешена (на выводе ENA ранее был установлен 0), то через обмотки двигателя будет протекать ток удержания вала. - Движение вала на 2 оборота в другую сторону:
Направление движения вала определяется логическим уровнем на выводе DIR. Ранее на нём был установлен 0, значит теперь нужно установить 1. Далее подачей импульсов на вывод PUL мы заставляем вращаться вал, но теперь в другую сторону. - Остановка вала без удержания:
В предыдущий раз мы останавливали двигатель прекращая подавать импульсы на вывод PUL, но не запрещали работу двигателя, в результате через его обмотки протекал ток удержания вала. Теперь мы запретим работу двигателя установив на выводе ENA уровень логической 1, что приведёт к исчезновению токов в обмотках двигателя. Теперь в течении 5 секунд, двигатель будет не только остановлен, но и его вал можно свободно вращать руками.
Управление шаговым двигателем по прерываниям от 2 таймера Arduino:
const uint8_t pin_ENA = 2; // Вывод Arduino подключённый к входу драйвера ENA+. const uint8_t pin_DIR = 3; // Вывод Arduino подключённый к входу драйвера DIR+. const uint8_t pin_PUL = 4; // Вывод Arduino подключённый к входу драйвера PUL+. // Вывод GND Arduino соединён с входами драйвера ENA-, DIR-, PUL-. volatile uint32_t step=0; // Переменная хранит количество микрошагов, которые требуется совершить. // void setup() < // pinMode( pin_ENA, OUTPUT ); // Конфигурируем вывод Arduino как выход. pinMode( pin_DIR, OUTPUT ); // Конфигурируем вывод Arduino как выход. pinMode( pin_PUL, OUTPUT ); // Конфигурируем вывод Arduino как выход. funcSetTimer2( 1000 ); // Запускаем 2 таймер указав частоту следования микрошагов от 1 до 200'000 Гц. >// Чем выше частота, тем выше скорость вращения вала. // void loop() < // // Готовимся к движению вала: // digitalWrite( pin_ENA, 0 ); // Разрешаем работу двигателя. delayMicroseconds(5); // Выполняем задержку t1 (см. график STEP/DIR). digitalWrite( pin_DIR, 0 ); // Выбираем направление вращения. delayMicroseconds(5); // Выполняем задержку t2 (см. график STEP/DIR). // Поворачиваем вал на 2 оборота: // step=1600; // Указываем количество микрошагов, которые требуется совершить. while(step)// Ждём обнуления переменной. // Останавливаем вал удерживая его: // Двигатель не вращается, если на вывод PUL не поступают импульсы. delay(5000); // Ждём 5 секунд. В это время двигатель остановлен, его вал удерживается. // Меняем направление движения вала: // digitalWrite( pin_DIR, 1 ); // Меняем логический уровень вывода DIR с 0 на 1. delayMicroseconds(5); // Выполняем задержку t2 (см. график STEP/DIR). // Поворачиваем вал на 2 оборота: // step=1600; // Указываем количество микрошагов, которые требуется совершить. while(step) // Ждём обнуления переменной. // Останавливаем вал без удержания: // digitalWrite( pin_ENA, 1 ); // Запрещаем работу двигателя, отключаем токи в обмотках. delay(5000); // Ждём 5 секунд. В это время двигатель отключен, его вал свободен. > // // // ОБРАБОТКА ПРЕРЫВАНИЙ 2 ТАЙМЕРА: // ISR(TIMER2_COMPA_vect) < // Функция вызывается по совпадению регистров TCNT2 и OCR2A. if( step )< // Если требуется выполнять микрошаги, то . bool p = digitalRead(pin_PUL); // Определяем текущее состояние на выводе PUL. digitalWrite(pin_PUL, !p); // Меняем состояние на выводе PUL. if( p )< step--; >// Уменьшаем количество требуемых микрошагов. > // > // // // ФУНКЦИЯ НАСТРОЙКИ 2 ТАЙМЕРА: // void funcSetTimer2(uint32_t f)< // Параметр: «f» - частота тактирования ШД от 1 до 200'000 Гц. if(f>200000) // Определяем значение предделителя: uint16_t i; uint8_t j; f*=2; if(f>(F_CPU/255/ 1))else if(f>(F_CPU/255/ 8))else if(f>(F_CPU/255/ 32))else if(f>(F_CPU/255/ 64))else if(f>(F_CPU/255/128))else if(f>(F_CPU/255/256))else // Устанавливаем регистры 2 таймера: TCCR2A = 0<
Как только переменной step присваивается число отличное от 0, то на драйвер начинают поступать импульсы. Значение step убывает с каждым поданным импульсом, пока не достигнет 0, что приведёт к остановке вала двигателя. Частота подачи импульсов в Гц указывается функцией funcSetTimer2().
В данном скетче мы ждём завершение вращения вала проверяя значение step в цикле while, вместо этого можно выполнять другие действия, например, опрашивать концевики, датчики, измерять пройденное расстояние и т.д.
Код работает на Arduino UNO, Pro Mini, Nano, Mega.
Ссылки
- Шаговые двигатели.
- Драйвер шагового двигателя, TB6600 (4.0А).
- Драйвер шагового двигателя DM556 (5.6A).
- Драйвер шагового двигателя DM860H (7.2A).
- Wiki - Шаговые двигатели.