Синхронные двигатели малой мощности
Синхронные электродвигатели малой мощности (микродвигатели) используются в системах автоматики, различных бытовых приборах, часах, фотоаппаратах и т. д.
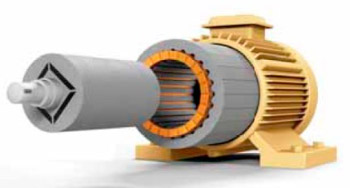
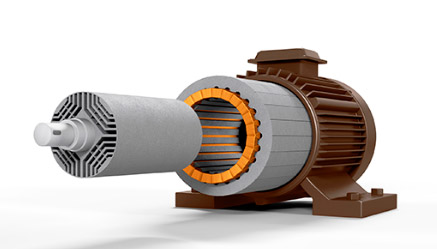
Большинство синхронных электродвигателей малой мощности отличается от машин нормального исполнения только конструкцией ротора, который, как правило, не имеет обмотки возбуждения, контактных колец и прижимающихся к ним щеток.
Для возникновения вращающего момента ротор выполняют из магнитно-твердого сплава с последующим однократным намагничиванием его в сильном импульсном магнитном поле, в результате чего в дальнейшем полюсы сохраняют остаточную намагниченность.
При использовании магнитномягкого материала ротору придают особую форму, обеспечивающую различное магнитное сопротивление его магнитопровода в радиальных направлениях.

Синхронные двигатели с постоянными магнитами имеют цилиндрический явнополюскый ротор из магнитно-твердого сплава и короткозамкнутую пусковую обмотку.
В момент пуска синхронный двигатель работает как асинхронный и его начальный вращающий момент создается за счет взаимодействия вращающегося магнитного поля статора с наведенными им токами в короткозамкнутой обмотке ротора. Поскольку двигатель пускается в ход в возбужденном состоянии, то магнитное поле постоянных магнитов вращающегося ротора наводит в обмотке статора э. д. с. переменной частоты а это вызывает токи, из-за которых возникает тормозной момент.
Результирующий момент на валу двигателя определяется суммой моментов, обусловленных короткозамкнутой обмоткой и тормозным эффектом, т. е. который зависит от скольжения. В процессе разгона ротора этот момент достигает минимального значения которое при правильном выборе пусковой обмотки должно быть больше номинального момента.
Когда скорость приблизится к синхронной, ротор, в результате взаимодействия поля постоянных магнитов с вращающимся магнитным полем статора втягивается в синхронизм и далее вращается с синхронной скоростью.
Рабочие характеристики синхронного двигателя с постоянными магнитами мало отличаются от аналогичных характеристик синхронного двигателя с обмоткой возбуждения ротора.

Синхронные реактивные двигатели имеют явнополюсный ротор из магнитно-мягкого материала с впадинами, или секционированный, благодаря чему его магнитное сопротивление в радиальных направлениях различно. Ротор со впадинами состоит из штампованных листов электротехнической стали и имеет короткозамкнутую пусковую обмотку. Встречаются роторы из сплошного ферромагнитного материала с аналогичными впадинами. Ротор секционированный состоит из листов электротехнической стали, залитых алюминием или другим диамагнитным материалом, выполняющим роль коротко-замкнутой обмотки.
При включении обмотки статора возбуждается вращающееся магнитное поле и происходит асинхронный пуск двигателя. По завершении разгона ротора до подсинхронной скорости он под действием реактивного вращающего момента, обусловленного различием магнитных сопротивлений в радиальных направлениях, входит в синхронизм и располагается относительно вращающегося магнитного поля статора так, чтобы его магнитное сопротивление для этого поля было наименьшим.

Обычно синхронные реактивные двигатели изготовляют номинальной мощностью до 100 Вт, а иногда и выше, если простоте конструкции и повышенной надежности придают особое значение. При одинаковых габаритах номинальная мощность синхронных реактивных двигателей в 2 — 3 раза меньше номинальной мощности синхронных двигателей с постоянными магнитами, но по конструкции они проще, отличаются меньшей стоимостью, номинальный коэффициент мощности их не превышает 0,5, а номинальный к. п. д. составляет до 0,35 — 0,40.
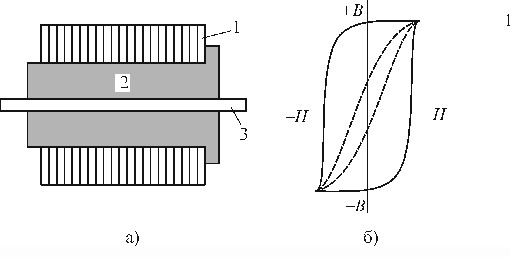
Синхронные гистерезисные двигатели имеют ротор из магнитотвердого сплава с широкой петлей гистерезиса. С целью экономии этого дорогостоящего материала ротор выполняют сборной конструкции, при которой вал крепится на втулке из ферро- или диамагнитного материала, а на ней укрепляют сплошной или собранный из пластин полый цилиндр, затянутый запорным кольцом. Использование магнитно-твердого сплава для изготовления ротора приводит к тому, что в работающем двигателе волны распределения магнитной индукции по поверхностям статора и ротора смещены друг относительно друга на некоторый угол, называемый углом гистерезиса, что обусловливает возникновение гистерезисного вращающего момента, направленного в сторону вращения ротора.
Различие между синхронными двигателями с постоянными магнитами и синхронными гистерезисными двигателями состоит в том, что у первых ротор при изготовлении машин подвергается предварительному намагничиванию в сильном импульсном магнитном поле, а у вторых он намагничивается вращающимся магнитным полем статора.
При пуске синхронного гистерезисного двигателя помимо основного гистерезисного вращающего момента в машинах со сплошным ротором возникает еще асинхронный вращающий момент, обусловленный вихревыми токами в магнитопроводе ротора, что способствует разгону ротора, вхождению его в синхронизм и дальнейшую работу с синхронной скоростью при постоянном сдвиге ротора относительно вращающегося магнитного поля статора на угол, определяемый нагрузкой на валу машины.
Синхронные гистерезисные двигатели эксплуатируют как в синхронном режиме, так и в асинхронном, но в последнем случае при малом скольжении. Синхронные гистерезисные двигатели отличаются большим начальным пусковым моментом, плавностью входа в синхронизм, незначительным изменением тока в пределах 20 — 30 % при переходе от холостого хода к режиму короткого замыкания.
Эти двигатели имеют лучшие показатели, чем синхронные реактивные, отличаются простотой конструкции, надежностью и бесшумностью в работе, малыми габаритами и незначительной массой.
Отсутствие короткозамкнутой обмотки приводит к качаниям ротора при переменной нагрузке, что обусловливает определенную неравномерность его вращения, ограничивающую область применения машин, которые изготовляют номинальной мощностью до 400 Вт на промышленную и повышенные частоты как одно-, так и двухскоростные.
Номинальный коэффициент мощности синхронных гистерезисных двигателей не превышает 0,5, а номинальный к. п. д. достигает значения 0,65.

Синхронные реактивно-гистерезисные двигатели имеют явнополюсный статор с обмоткой, расположенной на магнитопроводе, собранном из двух симметричных пакетов листов электротехнической стали со стыком внутри каркаса обмотки. Магнитопровод имеет два полюса, разрезанных продольным пазом на равные части, причем на одной из них на каждом полюсе находятся короткозамкнутые витки. Между этими расщепленными полюсами находится ротор, составленный из нескольких тонких колец с перемычками из закаленной магнитно-твердой стали, насаженных на валик, соединенный с редуктором, снижающим частоту вращения выходного вала до нескольких сотых долей или нескольких десятков оборотов в минуту.
При включении обмотки статора, благодаря короткозамкнутым виткам, создается сдвиг по фазе во времени между магнитными потоками неэкранированной и экранированной частей полюсов, что приводит к возбуждению результирующего вращающегося магнитного поля. Это поле, взаимодействуя с ротором, способствует возникновению асинхронного и гистерезисного вращающих моментов, вызывающих разгон ротора, который по достижении подсинхронной скорости под влиянием реактивного и гистерезисного вращающих моментов входит в синхронизм и вращается в направлении, от неэкранированной части полюса к его экранированной части, где расположены короткозамкнутые витки.
У реверсивных двигателей вместо короткозамкнутых витков применяют четыре катушки, которые располагают на обеих частях каждого расщепленного полюса, и для принятого направления вращения ротора замыкают соответствующую пару катушек накоротко.
Синхронные реактивно-гистерезисные двигатели имеют относительно большие габариты и массу, номинальная мощность их не превышает 12 мкВт, работают они при очень низком коэффициенте мощности, а номинальный к. п. д. их не превышает 0,01.

Синхронные шаговые двигатели преобразуют управляющие электрические импульсы в заданный угол поворота, осуществляемый дискретным путем. Они имеют статор, на магнитопроводе которого находятся две или три одинаковые пространственно сдвинутые обмотки, поочередно присоединяемые к источнику электрической энергии в виде прямоугольных импульсов регулируемой частоты. Под влиянием импульсов тока полюсы статора соответственно намагничиваются с переменной полярностью. Изменение направления токов в обмотках статора приводит к соответствующему перемагничиванию полюсов и установлению новой противоположной полярности.
Явнополюсный ротор шаговых двигателей может быть активным и реактивным. Активный ротор имеет обмотку возбуждения постоянного тока, контактные кольца и щетки или систему постоянных магнитов с чередующейся полярностью, а реактивный ротор выполняют без обмотки возбуждения.
Число полюсов ротора шагового двигателя в два раза меньше числа полюсов статора. Каждое переключение обмоток статора приводит к повороту результирующего магнитного поля машины и вызывает синхронное перемещение ротора на один шаг. Направление поворота ротора зависит от полярности импульса, поданного на соответствующую обмотку статора.
Телеграмм канал для тех, кто каждый день хочет узнавать новое и интересное: Школа для электрика
Если Вам понравилась эта статья, поделитесь ссылкой на неё в социальных сетях. Это сильно поможет развитию нашего сайта!
Не пропустите обновления, подпишитесь на наши соцсети:
Синхронная электрическая машина

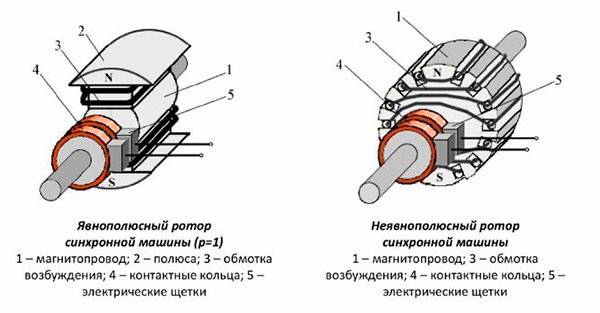
Синхро́нная электри́ческая маши́на, электрическая машина переменного тока , у которой частота вращения ротора кратна частоте тока в электрической сети . Наибольшее распространение получили синхронные электрические машины с трёхфазной обмоткой переменного тока на статоре и обмоткой возбуждения, питаемой постоянным током , на роторе (основное исполнение); синхронную электрическую машину небольшой мощности иногда изготовляют в обращённом исполнении – с обмоткой возбуждения на статоре и трёхфазной обмоткой на роторе (рис.). В основном исполнении неподвижный статор, в обмотке которого наводится переменная электродвижущая сила , называется якорем, а ротор, несущий обмотку возбуждения, – индуктором ; в обращённом исполнении, наоборот, якорем является ротор, а индуктором – статор.
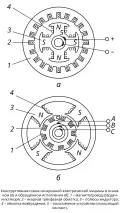
Конструктивная схема синхронной электрической машины. Конструктивная схема синхронной электрической машины.
Магнитопровод статора обычно представляет собой полый цилиндр, набранный из отдельных листов электротехнической стали, на внутренней поверхности которого располагаются пазы для укладки трёхфазной обмотки (рис., а). В зависимости от конструкции ротора синхронные электрические машины подразделяются на явнополюсные (ротор имеет выступающие полюсы, на которых размещена обмотка возбуждения) и неявнополюсные (полюсы выражены неявно). Явнополюсная конструкция обычно применяется при числе полюсов от 4 и более, неявнополюсная – в высокоскоростных (частота вращения 1500, 3000 об/мин и более) двух- и четырёхполюсных машинах.
На полюсах ротора часто размещают демпферную (т. н. успокоительную) обмотку (обеспечивает быстрое затухание колебаний ротора, возникающих в переходных режимах работы синхронной электрической машины). Стержни этой обмотки, выполненные из материала с повышенным удельным электрическим сопротивлением, замыкают накоротко на торцах пластинами или кольцами, образуя обмотку типа «беличье колесо».
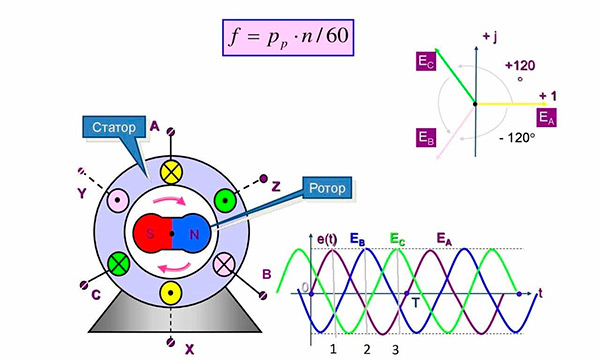
В зависимости от режима работы машины различают синхронные генераторы , синхронные электродвигатели , а также синхронные компенсаторы . В синхронном генераторе при протекании постоянного тока через обмотку возбуждения полюсы ротора создают постоянное магнитное поле чередующейся полярности; при вращении (от внешнего привода ) ротора магнитное поле индуцирует в проводниках обмотки якоря переменной ЭДС , частота которой f = р ⋅ n / 60 f = р·n/60 f = р ⋅ n /60 , где р и n – соответственно число пар полюсов и частота вращения ротора. Если к трёхфазной обмотке якоря подсоединить нагрузку, то в обмотке возникает ток, который создаёт вращающееся магнитное поле якоря с частотой вращения ротора.
При работе синхронной электрической машины в режиме электродвигателя трёхфазная обмотка статора подключается к электрической сети переменного тока; при этом образуется вращающееся магнитное поле, которое, взаимодействуя с полем полюсов ротора, создаёт вращающий момент , приводящий ротор в движение. Ротор (как при холостом ходе, так и при нагрузке) будет вращаться с постоянной частотой, равной частоте вращения поля.
Помимо основных конструкций, к синхронным электрическим машинам относятся также машины специального исполнения, такие как синхронные реактивные, вентильно-индукторные и гистерезисные электродвигатели, синхронные машины с возбуждением от постоянных магнитов, шаговые двигатели, индукторные машины (с электромагнитной редукцией частоты вращения) и др.
Основная область применения синхронных электрических машин – преобразование механической энергии в электрическую. Преобладающая часть потребляемой электрической энергии производится с помощью трёхфазных синхронных турбогенераторов и гидрогенераторов мощностью до нескольких десятков и сотен мегаватт. Синхронные двигатели применяются, например, в электроприводах , не требующих регулирования частоты вращения ( насосов , компрессоров , вентиляторов и т. п.).
Опубликовано 19 января 2023 г. в 21:51 (GMT+3). Последнее обновление 29 ноября 2023 г. в 22:55 (GMT+3). Связаться с редакцией
Синхронные двигатели малой мощности (микродвигатели)
В чем основное отличие синхронных двигателей малой мощности (микродвигателей) от асинхронных моторов?
- Их ротор является магнитом или электромагнитом малой мощности, а у маломощных агрегатов он не имеет обмотки возбуждения и щеток.
- Токовая фаза может заметно опережать фазу напряжения.
- Частота вращения постоянна и не зависит от нагрузки.
В целом на ротор из твердых магнитных материалов однократно воздействуют сильным импульсным полем, намагничивая его. Намагниченность полюсов сохраняется надолго. Если магнит изготовлен из мягкого материала, ротору придается соответствующая форма для того, чтобы магнитопровод обладал разным радиальным магнитным сопротивлением. Двигатели с постоянным магнитом имеют цилиндрический ротор из твердого магнитного материала. Их стартовая обмотка коротко замкнута.
Принципы работы синхронных двигателей малой мощности (микродвигателей)
При запуске такой двигатель действует по принципу асинхронного, возбуждаясь от поля постоянных магнитов в крутящемся роторе. Из-за этого в обмотке статора возникает эдс с непостоянной частотой. Она создает токи, вызывающие тормозящий момент. Достигнув скорости синхронизма, двигатель перестает быть в асинхронном состоянии, после чего входит в свой обычный режим синхронизма с соответствующей скоростью. Такие синхронные двигатели малой мощности (микродвигатели) используются в фототехнике, бытовых устройствах, часовых механизмах, в автоматике и т.д.
Синхронный реактивный мотор
Он оснащен равнополюсным ротором. Имеет стартовую обмотку и изготавливается из особой листовой стали. Короткозамкнутой обмоткой является заливка алюминиевым или другим диамагнетиком.
Мощность этих моторов обычно не превышает 100Вт, в целом, она в 2-3 раза ниже мощности двигателей с неизменными магнитами (хотя они проще в исполнении и дешевле). КПД от 0,35 до 0,4, а максимальный мощностной коэффициент – 0,5.
Реверсивные синхронные двигатели
Четыре катушки на обеих частях расщепленных полюсов заменяют у них короткозамкнутые витки. Закоротив одну из пар, достигают вращения вала в нужную сторону.
Синхронные гистерезисные моторы
Их роторы изготовлены из магнитотвердого сплава с широкой гистерезисной петлей, и их намагничивает вращающееся магнитное поле статора. Они могут действовать как синхронным, так и асинхронным способом.
Для них характерны:
- очень высокий пусковой момент;
- токовая конфигурация порядка 20-30% при переходе с холостого хода в режим КЗ;
- плавный вход в режим синхронизма.
Двигатели этого типа выгодно отличаются от реактивных простотой конструкции, надежностью и маломощностью в работе, а также небольшим размерам и весом. Их выпускают и на 50 герц, и на другие частоты. Обладая мощностью не более 400Вт, они бывают одно- и двухскоростными.
Реактивно-гистерезисные двигатели
Их статор явнополюсного типа находится внутри обмоточного каркаса. Продольный паз разрезает два полюса на магнитопроводе на одинаковые части. Редуктор соединяет выходной вал с ротором и уменьшает скорость вала до нескольких сот или десятков оборотов в минуту.
Шаговые моторы
Они превращают электронные импульсы управления в угол поворота, реализуемый дискретным способом. На магнитопроводе статора находятся 2 или 3 однообразные обмотки. Они сдвинуты в пространстве и поочередно подключаются к источнику прямоугольных импульсов. Ротор явнополюсного типа может быть как активным, так и реактивным. У активных роторов есть обмотка возбуждения и контактные щетки или неизменные магниты, чья полярность чередуется. Реактивным роторам все вышеизложенное не свойственно.
Синхронный электродвигатель
Синхронный двигатель – тип электрических машин с равной частотой вращения вала и крутящегося магнитного поля неподвижного узла. За счет относительно сложной конструкции такие двигатели не так распространены, как асинхронные двигатели, однако, в некоторых случаях являются практически незаменимыми.
Рассмотрим конструкцию синхронных электродвигателей, их преимущества и недостатки.
Принцип работы
Принцип действия синхронных электрических машин основан на сцеплении крутящегося магнитного поля статора и постоянного магнитного поля ротора.
При этом концепция та же, что у асинхронного двигателя: при подаче трехфазного напряжения на обмотки неподвижного узла, сдвинутые на 1200, возникает магнитное поле с попеременно меняющимися полюсами.
При этом на обмотки ротора подается постоянный ток, который наводит постоянное магнитное поле.
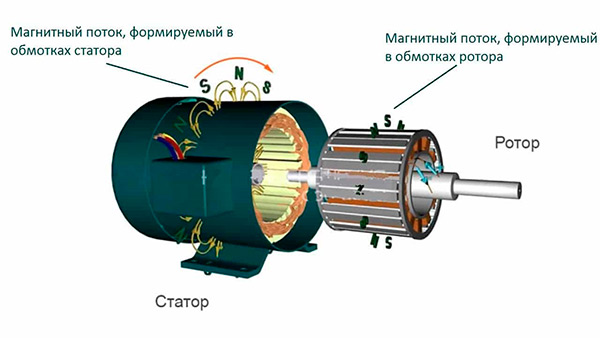
При подаче переменного трехфазного напряжения на статор и постоянного тока на ротор, разноименные полюса магнитного поля ротора будут притягиваться к соответствующим полюсам вращающегося поля статора. При таком взаимодействии возникает крутящий момент, который вращает вал. При этом его скорость будет равна частоте вращающегося магнитного поля, наводимого обмотками неподвижного узла. Наглядно принцип действия синхронных электрических машин представлен на рисунке ниже.
Конструкция и виды синхронных двигателей
Синхронные двигатели с роторными обмотками – самые распространенные электрические машины такого типа. Силовые агрегаты состоят из следующих основных узлов:
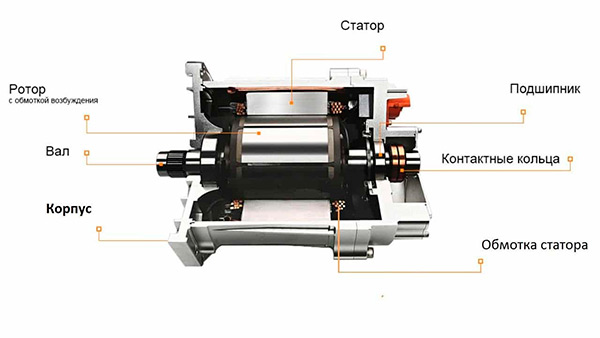
- Станины и корпуса. Элементы конструкции предназначены для размещения других узлов и опоры.
- Статора. Неподвижная часть включает сердечник и трехфазные обмотки переменного тока.
- Ротора. Вращающийся узел состоит из магнитопровода с уложенной в нем обмотки постоянного тока.
- Вала. Элемент конструкции предназначен для подключения механической нагрузки, на нем также размещены катушки возбуждения.
- Контактных колец. Узлы предназначены для подачи постоянного напряжения на обмотки ротора.
Конструкция синхронных двигателей может различаться в зависимости от вида. Например, в электрических машинах типа СДПМ для создания магнитного поля применяют постоянные магниты, такие электродвигатели также не имеют электрических колец. Различают роторы явно и неявнополюсной конструкции. Первые применяют в двигателях приводов низкооборотистого оборудования, работающего при значительной нагрузке.
Электродвигатели с неявнополюсным вращающимся узлом используют в скоростных приводах. По конструкции статора различают синхронные электрические машины с распределенной (на рисунке слева) и сосредоточенной обмоткой (на рисунке справа).

В асинхронных двигателях ЭДС вращающегося узла наводится под воздействием магнитного поля статора. Вследствие этого возникает разница между скоростями вращения магнитного поля и ротора, называемая скольжением. Синхронные электрические машины не имеют скольжения, благодаря чему такие двигатели можно применять в приводах точных механизмов.
К преимуществам синхронных двигателей с роторными обмотками также относят высокую перегрузочную способность, увеченный к.п.д (может достигать до 95%), пропорциональную зависимость момента на валу от питающего напряжения, стабильную скорость при переменной нагрузке. К недостаткам синхронных машин относят относительную сложность конструкции, наличие источника постоянного тока для обмотки возбуждения, сложность пусковой схемы.
Способы пуска и возбуждения синхронных двигателей
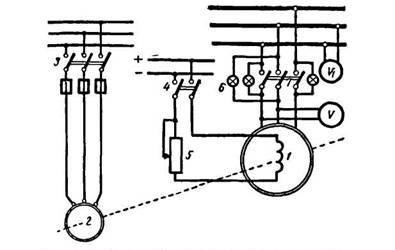
Синхронные машины требуют источник постоянного тока для питания обмотки ротора. Наибольшее распространение получили статические системы возбуждения на базе тиристорных преобразователей. Системы с генератором постоянного тока на валу электродвигателя уже практически не применяют.
Электропитание тиристорных возбудителей осуществляется от трансформатора, включенного в одну сеть с двигателем. Системы позволяют регулировать напряжение, коэффициент мощности, величину реактивной составляющей обмоток статора.
Синхронные электрические машины не могут запускаться прямым включением в сеть, так как смена полюсов вращающегося магнитного поля происходит слишком быстро, из-за инерции разгон ротора до синхронной скорости невозможен.
Существует несколько схем пуска электродвигателей синхронного типа.
Двигательный. Запуск синхронного двигателя осуществляется за счет разгона ротора до синхронной частоты при помощи вспомогательной электрической машины. При этом электродвигатель включается в сеть после достижения синхронной частоты, после чего вспомогательный двигатель останавливают. Двигательные схемы считаются морально устаревшими, из-за высокой стоимости и значительных габаритов и массы их уже практически не применяют.
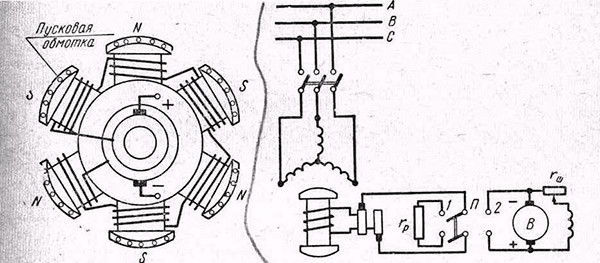
Асинхронный. Синхронные двигатели с асинхронным стартом имеют дополнительную обмотку типа «беличья клетка» на полюсных наконечниках ротора. Пуск электродвигателя осуществляется при отсутствии постоянного тока в обмотке возбуждения, как у асинхронных электрических машин. После разгона до скорости, близкой к синхронной, на роторную катушку подают постоянный ток, двигатель начинает работать в синхронном режиме. Во время старта, до входа в синхронизм, роторную обмотку замыкают на сопротивление, это необходимо для ограничения тока, наводимого полем статора при пуске и разгоне. Такой метод позволяет осуществлять запуск синхронной машины напрямую от сети. К недостаткам относят значительный пусковой ток, затруднение старта под нагрузкой.
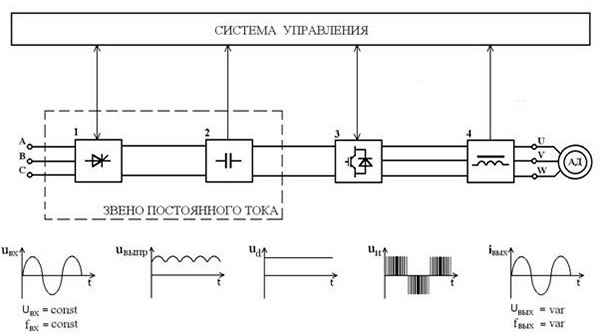
Частотный. При этом электродвигатель подключают к частотному преобразователю. Пуск электрической машины осуществляется путем подачи напряжения низкой частоты и плавного ее увеличения до номинального значения, двигатель все время работает в режиме синхронизма. Такой способ позволяет уменьшить время переходных процессов и пусковые токи, снизить тепловые нагрузки, осуществлять пуск синхронных электрических машин под нагрузкой. Недостатком способа является относительно высокая цена специализированного преобразователя частоты. Частотный пуск – наиболее перспективный, он позволяет устранить многие недоставки синхронных электрических машин.
Типы синхронных электродвигателей
Электрические силовые агрегаты с синхронной частотой вращения применяют для решений приводов самого различного назначения: оборудования для инженерных систем и промышленности, бытовых и производственных механизмов. Кроме электрических машин с роторными обмотками, существует еще несколько типов синхронных двигателей. Рассмотрим их типы и конструкцию подробнее.
Двигатели с постоянными магнитами
Конструкция СДПМ напоминает синхронные двигатели с обмотками ротора. Главное отличие – наличие постоянных магнитов на вращающейся части вместо обмоток. Электродвигатели с постоянными магнитами не требуют источника постоянного тока для питания обмотки возбуждения.
- Упрощенная в сравнении синхронным двигателем с обмотками ротора конструкция.
- Увеличенный к.п.д.
- Улучшенное отношение масса/мощность.
- Возможность точного управления моментом и скоростью.
СДПМ имеют более высокую стоимость, что несколько ограничивает их использование. Область применения электрических машин – приводы средней и малой мощности.
Синхронный реактивный двигатель
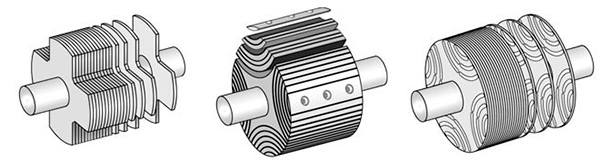
Вращение вала таких электродвигателей осуществляется за счет разности магнитной проводимости ротора в поперечной и продольной плоскости. Чем больше эти значения отличаются, тем выше крутящий момент на валу электрической машины. Конструкция статора реактивных электродвигателей не отличается от стандартных синхронных электрических машин с распределенной или сосредоточенной трехфазной обмоткой.
Варианты конструкции крутящейся части: с явновыраженными полюсами (слева), аксиально-расслоенная (по середине) и поперечно-расслоенная (справа).
Синхронный реактивный двигатель обладает следующими достоинствами:
- Простая конструкция ротора без магнитов и обмоток.
- Небольшой нагрев.
- Низкая инеркцинность.
- Возможность задания скорости в широком диапазоне.
К недостаткам электрических машин относят невысокий коэффициент мощности. Область применения таких двигателей – приводы маломощного оборудования и механизмов.
Гистерезисный двигатель
Принцип действия гистерезисных электрических машин основан на явлении гитерезиса магнитовтвердых материлов. Крутящий момент возникает под действием остаточного намагничивания ротора, которое осуществляется магнитным полем статора электродвигателя, в остальном принцип работы электродвиагателей сходен с СДПМ.
Вращающаяся часть гистерезисных двигателей имеет неявнополюсную сборуную конструкцию. К приемуществам электрических машин относятся:
- Простой старт без дополнительной аппаратуры.
- Отсутвие высоких пусковых токов.
- Плавный вход в синхронный режим.
- Простая конструкция.
- Более высокий коэффициент мощности чем у реактивных синхронных двигателей.
К недостаткам относят высокую цену, которая обсуловлена стоимостью магнитотвердых материалов с широкой петлей гистерезиса для ротора.
Реактивно-гистерезисный электродвигатель
Реактивно-гистерезисный двигатели – тип синхронных электрических машин с явнополюсным ротаторном. Пуск осуществляется за счет крутящего момента, возникающего при взаимодействии вращающегося магнитного поля статора и гистерезиса ротора.

Дальнейшая работа двигателя в синхронном режиме – за счет реактивного момента и остаточного намагничивания. Таким образом, двигатели совмещают достоинства реактивных и гистерезисных электрических машин:
- Простота конструкции.
- Самозапуск без дополнительного оборудования.
- Возможность работы от однофазной электросети.
К недостаткам относятся низкие КПД и cosφ. Область применения реактивно-гистерезисных двигателей: микроприводы различного назначения.