7. ФАЗОВАЯ АВТОПОДСТРОЙКА ЧАСТОТЫ

7.1. Общиесведения Системой фазовой автоподстройки частоты ( ФАПЧ ) называется система автоматического регулирования, обеспечивающая автоматическое регулирование частоты управляемого генератора в устройствах приема и обработки сигналов в соответствии с частотой входного сигнала и использующая в качестве измерительного элемента фазовый детектор. Системы ФАПЧ используются для подстройки частоты гетеродина в супергетеродинных радиоприемных устройствах, выделения несущей частоты в демодуляторах систем передачи сообщений при реализации когерентного приема сигналов, измерения частоты с помощью узкополосных следящих фильтров при формировании высокостабильных колебаний в синтезаторах частот различных радиотехнических устройств и т. д. Системы ФАПЧ могут быть реализованы в аналоговом и цифровом виде. Особенностью системы ФАПЧ (находящейся в состоянии синхронизации) является нулевая статическая ошибка по частоте, т. е. равенство частот колебаний подстраиваемого генератора (гетеродина) u г ( t ) = U г cos ω г t и эталонного (входного) колебания u c ( t ) = U c cos ω с t . Вместе с тем в электронных системах ФАПЧ существует статическая ошибка регулирования по фазе, т. е. статическое отличие фаз колебаний подстраиваемого генератора, управляемого напряжением (ГУН), и эталонного сигнала. Системы ФАПЧ обычно имеют сравнительно узкий диапазон начальных расстроек, в котором они осуществляют подстраивающее действие. При анализе работы системы ФАПЧ рассматривают режимы удержания и захвата. Режимом удержания называется установившийся режим равенства частот ω с = ω г , соответствующий эффективной работе системы ФАПЧ при медленных изменениях начальной расстройки. При этом имеются в виду изменения, скорость которых много меньше скорости переходных процессов в системе. Режимом захвата называется процесс, возникающий при скачкообразном изменении начальной расстройки и заканчивающийся установлением режима удержания. Характерным различием этих режимов является то, что в режиме захвата существенную роль играют переходные процессы. Основными характеристиками систем ФАПЧ являются следующие: полоса удержания ΔΩ У – область начальных расстроек гУН, внутри которой система ФАПЧ эффективно работает в режиме удержания; полоса захвата ΔΩ З – область начальных расстроек гУН, внутри которой система ФАПЧ эффективно работает в режиме захвата;
| Устройства приема и обработки сигналов. Лаб. практикум | -114- |
7. ФАЗОВАЯ АВТОПОДСТРОЙКА ЧАСТОТЫ время захвата t З – время перехода системы ФАПЧ в режим синхронизации, существенно зависящее от значения начальной расстройки между частотой входного колебания и частотой колебания гУН. 7.2. Принципыработысистемы фазовойавтоподстройкичастоты Основными элементами структурной схемы системы фазовой автоподстройки частоты ( рис. 7.1 ) являются: фазовый детектор – ФД, фильтр низкой частоты – ФНЧ, усилитель – УС, управляющий элемент – УЭ и перестраиваемый (синхронизируемый) генератор – гУН.
| ФД | ФНЧ | УС |
| u c ( t ) | ≈ φ |
| ГУН | u Г ( t ) | УЭ | |
Г Рис. 7.1. Структурная схема системы ФАПЧ На один вход фазового детектора ФД поступает сигнал u c ( t ) = U c cosω c t , на второй – высокочастотное колебание u г ( t ) = U г cos ω г t синхронизируемого перестраиваемого генератора. Между выходом ФД и входом управляющего элемента в петле обратной связи находятся фильтр низкой частоты ФНЧ и усилитель постоянного тока УС. Именно эти два элемента структурной схемы практически формируют частотную характеристику системы ФАПЧ и определяют ее петлевой коэффициент передачи. Если частота сигнала ω с и частота колебания на выходе ГУНω г отличаются друг от друга на постоянную величину ∆ ω, то мгновенное значение разности фазφ между ними будет равно
| φ( t ) = (ω г – ω с ) t = ∆ω t . | (7.1) |
| Если разность частот двух колебаний не постоянна во времени, то | |
| мгновенное значение разности фаз можно определить по формуле | |
| ϕ ( t ) = ∫ ∆ω ( t ) dt , | (7.2) |
| откуда | |
| ∆ω( t ) = d φ( t )/ dt . | (5.3) |
Обычно в качестве фазового детектора ФД ( рис. 7.1 ) используется аналоговый перемножитель, имеющий на выходе фильтр нижних частот,
| Устройства приема и обработки сигналов. Лаб. практикум | -115- |
7. ФАЗОВАЯ АВТОПОДСТРОЙКА ЧАСТОТЫ 7.2. Принципы работы системы фазовой автоподстройки частоты пропускающий лишь колебание разностной частоты. Тогда на выходе этого перемножителя будет присутствовать колебание вида
| u ф.д ( t ) = k ф.д U г U c cos[(ω г – ω с ) t ], | (7.4) |
где k ф.д – коэффициент передачи фазового детектора (аналогового перемножителя). Если положить коэффициент передачи ФНЧ в полосе пропускания k фнч = 1, то напряжение на входе управляющего элемента УЭ будет пропорционально косинусу текущего сдвига фаз между колебаниями:
| U уэ ( t ) = k ф.д kU г U c cos φ( t ), | (7.5) |

где φ( t ) = (ω г – ω с ) t ; k – коэффициент передачи петли обратной связи. Управляющее напряжение используется в системе ФАПЧ для под- стройки генератора, управляемого напряжением гУН. Изменение частоты ω г будет определяться изменением сдвига фаз φ( t ). Рассмотрим подробнее режимы работы системы ФАПЧ. Δω = ω c – ω Г Ω У Ω З ω н Δω = ω н Рис. 7.2. Зависимость разности частот входного сигнала ω с и сигнала ГУН ω Г от величины ω н В зависимости от начальной разности частот ω н входного колебания ω с и частоты ГУНω г0 при разомкнутой петле обратной связи система ФАПЧ может находиться в различных режимах ( рис. 7.2 ). На этом рисунке прямая ли- ния ∆ω= ω н соответствует разомкнутой петле обратной связи системы ФАПЧ. Когда начальная расстройка ω н больше полосы удержания∆Ω У , то в системе ФАПЧ наблюдается режим биений, для которого характерно отсутствие равенства частот ГУН и входного сигнала, т. е. ω с ≠ ω г . В этом режиме разность фаз входного колебания и колебания ГУНнепрерывно возрастает, а напряжение u ф.д ( t ) на выходе фазового детектора изменяется, представляя собой колебательное напряжение переменной частоты. Средняя частота биений меньше начальной расстройки ω н . Если начальная расстройка увеличива-
| Устройства приема и обработки сигналов. Лаб. практикум | -116- |
7. ФАЗОВАЯ АВТОПОДСТРОЙКА ЧАСТОТЫ 7.2. Принципы работы системы фазовой автоподстройки частоты ется, то средняя частота биений асимптотически стремится к ω н ( рис. 7.2 ). Наличие ФНЧ на выходе фазового детектора ФД при прочих равных условиях приводит к уменьшению амплитуды биений по сравнению со случаем рассмотрения системы ФАПЧ без ФНЧ, т. е. к затруднению ввода системы в состояние синхронизации. Именно поэтому в системах ФАПЧ с ФНЧ полоса захвата всегда меньше полосы удержания ( рис. 7.2 ). При достижении величиной |ω н | значения∆Ω З /2 средняя частота биений стремится к нулю, т. е. через время t З частота ГУНи частота входного сигнала становятся одинаковыми, и система ФАПЧ переходит в режим захвата. На практике полосу захвата ΔΩ З ( рис. 7.2 ) определяют по моменту синхронизации частот ГУНи входного сигнала при изменении |ω н | от больших значений к малым. При наличии синхронизации и изменении расстройки |ω н | от нулевого значения в сторону увеличения очевидно, что биения колебаний будут отсутствовать вплоть до момента срыва синхронизации при |ω н | ≈ ∆ Ω у /2. Лабораторнаяработа Фазоваяавтоподстройкачастоты Цель работы: экспериментальное исследование и моделирование процесса фазовой автоподстройки частоты: определение зависимости полосы захвата и полосы удержания от значения коэффициента усиления и параметров фильтра низкой частоты (интегрирующего и пропорциональноинтегрирующего) в петле обратной связи системы ФАПЧ; изучение влияния аддитивного входного шума на основные характеристики системы ФАПЧ. Описаниелабораторнойустановки Лабораторная установка предназначена для экспериментальных исследований процесса фазовой автоподстройки частоты. На установке исследуются: зависимость полосы захвата и удержания ФАПЧ от значения коэффициента усиления, вида и параметров интегрирующего и пропорцио- нально-интегрирующего ФНЧ в петле обратной связи; влияние аддитивного шума на основные характеристики ФАПЧ. Установка может использоваться в автономном режиме и режиме подключения внешних измерительных приборов. Вид лицевой панели лабораторной установки приведен на рис. 7.3 . На левом верхнем поле изображена функциональная схема установки. На нижнем поле расположена панель ручного управления с переключателями режимов работы, на правом поле – цифробуквенный дисплей с отображением пунктов работы и результатов измерений исследуемых параметров системы ФАПЧ.
| Устройства приема и обработки сигналов. Лаб. практикум | -117- |
| 7. ФАЗОВАЯ АВТОПОДСТРОЙКА ЧАСТОТЫ |
| 7.2. Принципы работы системы фазовой автоподстройки частоты |
| Рис. 7.3. Вид лицевой панели установки |
Составустановки Лабораторная установка состоит из генератора входного сигнала, генератора шума и устройства ФАПЧ ( рис. 7.3 ). генератор высокочастотного сигнала – ГВЧ (« G ≈ ») формирует синусоидальный высокочастотный сигнал u с ( t ) = U c cosω c t , регулируемый по частоте в пределах 440–510 кГц. Генератор шума – ГШ (« G w ») вырабатывает аддитивный нормальный шум с изменяемым в пределах 0–2 В среднеквадратическим значением напряжения U ш . Сигналы U c ( t ) и U ш ( t ) суммируются в избирательном резонансном усилителе с полосой пропускания 35 кГц. Система ФАПЧ состоит из фазового детектора – ФД («≈φ»); фильтра низкой частоты – ФНЧ; пропорционально интегрирующего фильтра (ПИФ); усилителей с коэффициентами усиления К 1 и К 2 и перестраиваемого управляемого напряжением генератора – ГУН(« G ►|| »). Для проведения исследований в лабораторной установке предусмотрено изменение следующих параметров системы ФАПЧ: вида RC -фильтров – интегрирующего (ФНЧ) и пропорциональноинтегрирующего (ПИФ); параметров фильтров: значений интегрирующих конденсаторов в ФНЧ С 1 и С 2, значений RC -цепочек в ПИФ – R 1 C 1 и R 2 C 1; коэффициента усиления петли обратной связи ОС – К 1 и К 2. Значения параметров: C 1 = 22 нФ, C 2 = 2 нФ, R 1 = 430 Ом, R 2 = 51 Ом, отношение К 1/ К 2 = 1,5.
| Устройства приема и обработки сигналов. Лаб. практикум | -118- |
7. ФАЗОВАЯ АВТОПОДСТРОЙКА ЧАСТОТЫ 7.2. Принципы работы системы фазовой автоподстройки частоты На задней стенке установки имеются контрольные выходы: «Вых 1» – напряжение U с , «Вых 2» – напряжение U г , «Вых 3» – напряжение U упр . Панельручногоуправления Панель ручного управления состоит из трех полей. В поле «ГВЧ» (генератор высокочастотного сигнала u c ( t )) находятся: «ВКЛ» – кнопка включения генератора; «ЧАСТОТА» – потенциометр регулировки частоты. В поле «ГШ» (генератор шума) имеются: «ВКЛ» – кнопка включения генератора шума; «АМПЛИТУДА» – потенциометр регулировки величины уровня шума. В поле «ФАПЧ» расположены: «ФНЧ» «ВКЛ» – кнопка включения ФНЧ. « С 1» и « С 2» – кнопки подключения конденсаторов С 1 и С 2. «ПИФ» «ВКЛ» – кнопка включения ПИФ. « C 1 R 1» и « C 1 R 2» – кнопки включения RC-цепочек с параметра- ми C 1 R 1 и C 1 R 2. «Усиление» «К1» и «К2» – кнопки переключения коэффициентов усиления К1 и К2 петли ОС. Полецифробуквенногодисплея На цифробуквенном дисплее отображаются измеряемые величины и номер пункта работы. Под дисплеем расположены следующие кнопки: «<<» – кнопка перелистывания страниц с пунктами работы к на- чалу; «>>» – кнопка перелистывания страниц с пунктами работы к концу; «Т» – кнопка сброса контроллера управления. Экспериментальныеисследования Ознакомившись с описанием лабораторной установки и составив план проведения эксперимента, включить питание и саму установку нажатием кнопки «Вкл». Все переключения производятся с помощью кнопок на передней панели установки, включенное состояние кнопки индицируется светодиодом. Измерения выполняются встроенными приборами под управлением микро-
| Устройства приема и обработки сигналов. Лаб. практикум | -119- |
7. ФАЗОВАЯ АВТОПОДСТРОЙКА ЧАСТОТЫ 7.2. Принципы работы системы фазовой автоподстройки частоты контроллера, а результаты измерений выводятся на цифробуквенный дисплей. Выбор измеряемых величин и подключение их к цифробуквенному дисплею производятся кнопками выбора пункта лабораторной работы (« << », « >> »). Лабораторная работа включает пять заданий. Задание 1. Измерение амплитудно-частотной характеристики входного фильтра Порядок выполнения 1. Включить генератор высокой частоты ГВЧ, отключить генератор шума гШ и петлю обратной связи ОС. 2. Изменяя частоту f c в пределах от 440–510 кГц, измерить напряже- ние сигнала U Σ на выходе полосового сумматора « Σ ». 3. Результаты измерений занести в таблицу. Построить график зависимости U Σ = F ( f c ). Определить значение центральной частоты входного фильтра – f c0 и его полосу пропускания – F (по уровню 0,7). Задание 2. Измерение собственной частоты колебания генератора, управляемого напряжением, ГУН – f г0 Измерение производится при разомкнутой петле обратной связи (усилители К1 и К2 отключены от U упр ). Задание 3. Измерение полосы захвата и полосы удержания ФАПЧ без фильтрации Порядок выполнения 1. Включить генератор, управляемый напряжением, ГВЧ и ФНЧ; отключить конденсаторы С 1, С 2. 2. Установить коэффициент усиления К1. 3. Плавно увеличивая частоту f c в диапазоне от минимального значения до максимального, зафиксировать нижнюю частоту захвата f зн и верхнюю частоту удержания f ув . 4. Плавно изменяя f c в обратном порядке от максимального значения до минимального, зафиксировать верхнюю частоту захвата f зв и нижнюю частоту удержания f ун . 5. Определить полосы захвата (Δ F З = f зв – f зн ) и удержания (Δ F У = f ув – f ун ) для данных параметров схемы ФАПЧ. 6. Повторить измерения для коэффициента усиления К2. Задание 4. Исследование зависимости полосы захвата и полосы удержания ФАПЧ от типа и параметров низкочастотных фильтров в петле обратной связи Порядок выполнения 1. Включить генератор высокой частоты ГВЧ и фильтр низкой часто- ты ФНЧ. 2. Подключить усилитель К1 и интегрирующий конденсаторв ФНЧ– С 1.
| Устройства приема и обработки сигналов. Лаб. практикум | -120- |
7. ФАЗОВАЯ АВТОПОДСТРОЙКА ЧАСТОТЫ 7.2. Принципы работы системы фазовой автоподстройки частоты 3. Плавно увеличивая частоту f c в диапазоне от минимального значения до максимального, получить зависимость ( f c – f г ) = F ( f c – f г0 ) (см. рис. 7.2 ). 4. Получить эту же зависимость при плавном уменьшении частоты f c в обратном порядке, от максимального значения до минимального. 5. Построить график ( f c – f г ) = F ( f c – f г0 ) и по нему определить полосы захвата и удержания для данного режима работы схемы ФАПЧ. 6. Подключить усилитель К1 иинтегрирующий конденсатор в ФНЧ – С 2. Определить полосы захвата и удержания. Измерения проводить в соответствии с методикой задания 3. 7. Подключить усилительК2 и интегрирующий конденсаторв ФНЧ – С 1. Определить полосы захвата и удержания. Измерения проводить в соответствии с методикой задания 3. 8. Подключить усилительК2 и интегрирующий конденсаторв ФНЧ – С 2. Определить полосы захвата и удержания. Измерения проводить в соответствии с методикой задания 3. Включить генератор высокой частоты ГВЧ и пропорционально-интегрирующий фильтр ПИФ. 9. Подключить усилитель К1 и цепочку С 1 R 1 в ПИФ. Определить полосы захвата и удержания. Измерения проводить в соответствии с методикой задания 3. 10. Подключить усилитель К1 и цепочку С 1 R 2 в ПИФ. Определить полосы захвата и удержания. Измерения проводить в соответствии с методикой задания 3. 11. Подключить усилитель К2 и цепочку С 1 R 1 в ПИФ. Определить полосы захвата и удержания. Измерения проводить в соответствии с методикой задания 3. 12. Подключить усилитель К2 и цепочку С 1 R 2 в ПИФ. Определить полосы захвата и удержания. Измерения проводить в соответствии с методикой задания 3. Задание 5. Исследование влияния уровня шума на полосы захвата и удержания в системе ФАПЧ Порядок выполнения 1. Измерения уровня сигнала и уровня шума производятся разными вольтметрами, работающими параллельно (для измерения шума используется квадратичный вольтметр). В зависимости от вида измеряемого сигнала кнопкой «Вкл» включается соответствующий генератор (ГВЧ или ГШ). При совместном включении генераторов измеряется суммарный сигнал U Σ . 2. Включить генератор высокой частоты ГВЧ. Измерить уровень сигнала U с на резонансной частоте сумматора. 3. Включить фильтр низкой частоты ФНЧ, интегрирующий конденса- тор С 1 и подключить усилитель К1. Провести измерения полосы захвата F З и удержания F У при уровнях шума в диапазоне U ш = 0–1 В со средним шагом 0,2 В. Измерения уровня шума U ш проводить при отключенном сигнале. Измерения полос захвата и удержания проводить при одновременно вклю-
| Устройства приема и обработки сигналов. Лаб. практикум | -121- |
7. ФАЗОВАЯ АВТОПОДСТРОЙКА ЧАСТОТЫ 7.2. Принципы работы системы фазовой автоподстройки частоты ченных генераторах сигнала и шума по методике задания 3 . Результаты измерений занести в таблицу. 4. Включить пропорционально-интегрирующий фильтр ПИФ, интегрирующую цепочку R 1 С 1 и подключить усилитель К1. Провести измерения полосы захвата F З и удержания F У при различных уровнях шума в диапазоне U ш = 0–2 В в соответствии с методикой задания 3 . Моделированиефазовойавтоподстройкичастоты 1. Составить описание конкретной модели ФАПЧ с возможностью изменения типа и параметров ФНЧ в петле регулирования в терминах и обозначениях, принятых в пакете OrCAD [ 6 ]. 2. Задать исходные данные (амплитуду и частоту входного сигнала, параметры генератора шума и их возможные диапазоны изменений). 3. Задать требуемые выходные характеристики (амплитудно-час- тотные характеристики, полосы захвата и удержания и т. д.). 4. Выполнить задания (запуск программы, получение, проверка и корректировка результатов, копирование результатов в отчет по лабораторной работе). 1. Наименование и цель работы. 2. Функиональную схему исследуемой системы ФАПЧ. 3. график зависимости U Σ = F ( f c ). 4. Таблицы с результатами измерений и экспериментальные зависи-
| мости ( f c | – f г ) = F ( f c – f г0 ) для задания 4. |
| 5. | Результаты измерений и расчетов полосы захвата F З и полосы |
| удержания F У для заданий 3 и 4 . | |
| 6. | Таблицы измерений и расчетов полосы захвата F З и полосы удер- |
жания F У при различных уровнях шума для задания 5. 7. Анализ полученных результатов. 7.1. Объяснение зависимости изменения F У от коэффициента усиления К в петле обратной связи ФАПЧ. 7.2. Объяснение зависимости F З от величины емкости конденсатора интегрирующего фильтра «ФНЧ» при постоянном значении коэффициента усиления К. 7.3. Сравнение экспериментальных значений отношения F З /Δ F У для интегрирующего и пропорционально-интегрирующего фильтра при K = const. 7.4. Анализ влияния уровня аддитивного шума на полосы захвата и удержания для интегрирующего и пропорционально-интегрирующего фильтров. 8. Выводы. Анализ полученных результатов моделирования процесса ФАПЧ (сравнение с данными экспериментального исследования аналогичныхФАПЧ, срав-
| Устройства приема и обработки сигналов. Лаб. практикум | -122- |
7. ФАЗОВАЯ АВТОПОДСТРОЙКА ЧАСТОТЫ 7.2. Принципы работы системы фазовой автоподстройки частоты нение полученных характеристик между собой с формулированием вывода о достоинствах и недостатках каждой схемы ФНЧ, применяемой в петле регулирования и т. д.). Контрольныевопросы 1. Какие функции выполняют системы ФАПЧ и каковы их основные параметры? 2. Каковы принципы работы и схемы систем ФАПЧ? Какими способами можно изменять частоту управляемого генератора? 3. Как определяется полоса захвата и полоса удерживания системы ФАПЧ? 4. Какие типы фильтров используются в цепи регулирования? Из каких соображений выбираются параметры фильтров? 5. Что понимают под временем захвата системы ФАПЧ и от чего оноза- висит? 6. Какое влияние оказывает аддитивный входной шум на работу системы ФАПЧ? 7. Какова методика измерения полосы захвата и полосы удержания системы ФАПЧ при отсутствии внешних шумов и их наличии? 8. Каковы принципы моделирования процесса фазовой автоподстройки частоты? В чем преимущества и недостатки моделирования?
| Устройства приема и обработки сигналов. Лаб. практикум | -123- |
Какие функции может выполнять система фапч
Т. Келин, Д. Супонников
Характеристики цифровой системы фазовой автоподстройки частоты
Системы фазовой автоподстройки частоты (ФАПЧ) широко используются в технике связи из-за их широких возможностей по обеспечению битовой синхронизации и демодуляции сигналов с ЧМ и ФМ. При этом цифровые системы ФАПЧ имеют повышенную надёжность и меньшую стоимость в сравнении с аналоговыми [1].Цифровые системы ФАПЧ, в которых используется фазовый детектор с двоичным квантованием и дискретная подстройка фазы, применяются для детектирования двоичных сигналов или для подавления дрожания фазы (phase jitter) в системах передачи дискретной информации. Ширина полосы захвата и возможность подавления дрожания фазы являются взаимоисключающими характеристиками и, кроме того, возможность подавления дрожания фазы быстро уменьшается с ростом отклонения частоты входного сигнала от частоты несинхронизированной петли ФАПЧ. Для улучшения этих характеристик в цифровой системе ФАПЧ может быть использован новый тип последовательных фильтров, который рассматривается в данной работе.
Введение
Цифровые системы ФАПЧ в настоящее время широко используются в технике связи и управления, радиоавтоматике, радиоизмерительных комплексах и других системах авторегулирования. В ряде работ исследованы аналоговые системы ФАПЧ с элементами цифровой схемотехники [2], полностью цифровые системы ФАПЧ применительно к детектированию ЧМ, а также для дискретной подстройки фазы в системах передачи с ИКМ [3] и для синхронизации в цифровых сетях.
Основная проблема цифровых систем ФАПЧ с двоичным выходом фазового детектора отмечена в [4], где исследовалась простая петля с двоичным выходом фазового компаратора и фильтр случайных блужданий (ФСБ). Проблема состоит в невозможности совместить достаточную ширину полосы захвата с возможностью подавления дрожания фазы. Улучшение в характеристиках подавления дрожания фазы приводит к сужению полосы захвата. Предлагаемая в данной работе цифровая система ФАПЧ отчасти свободна от этой проблемы за счёт использования петлевого фильтра нового типа. Характеристики системы ФАПЧ с таким фильтром проверены в ходе теоретических исследований, экспериментально и при компьютерном моделировании.
Разработанная цифровая система ФАПЧ обладает следующими свойствами:
- широкая полоса захвата при одновременно сильном подавлении дрожания фазы;
- хорошее подавление дрожания фазы при наличии сдвига по частоте у опорного генератора или отклонения по частоте у входного сигнала;
- малое время захвата.
Работа цифровой системы ФАПЧ в режиме битового синхронизатора

В состав рассматриваемой цифровой системы ФАПЧ входят: фазовый компаратор с двоичным выходом, последовательный петлевой фильтр, устройство управления фазой, опорный генератор и делитель. На рис. 1 представлена структурная схема цифровой системы ФАПЧ, а на рис. 2 и 3 — временные диаграммы в её характерных точках — на выходе фазового детектора и на выходе фильтра. Предполагается, что на вход системы подаётся сигнал прямоугольной формы (рис. 2) со средним значением частоты, равным 1/Tr, в котором фаза меняется по случайному закону с известным распределением. Фазовый компаратор определяет отставание или опережение выходного сигнала относительно входного. Двоичные сигналы опережения-отставания поступают на последовательный петлевой фильтр. Назначение петлевого фильтра — преобразовать выходные сигналы фазового компаратора в сигналы «положительный (или отрицательный) сдвиг», которые являются более точными и достоверными, чем сигналы «опережение» и «отставание». Петлевой фильтр формирует сигналы «положительный (или отрицательный) сдвиг», осуществляя статистическую обработку сигналов «опережение» и «отставание». В устройстве управления фазой в случае появления сигнала «положительный сдвиг» к последовательности импульсов, вырабатываемых опорным генератором, добавляется один импульс, в случае же возникновения сигнала «отрицательный сдвиг», из последовательности вычитается один импульс. Далее преобразованная последовательность импульсов делится на целое число L так, что выходной сигнал делителя подстроен по фазе с шагом подстройки Tc с или 2/L рад. Таким образом, цифровая система ФАПЧ обеспечивает равенство фаз выходного и входного сигналов.
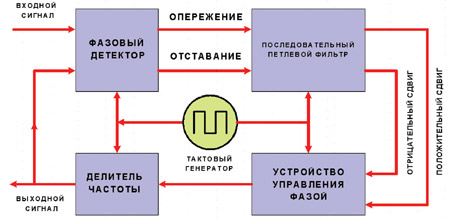
Рисунок 1. Блок-схема полностью цифровой системы ФАПЧ

Рисунок 2. Сигналы на выходе фазового компаратора
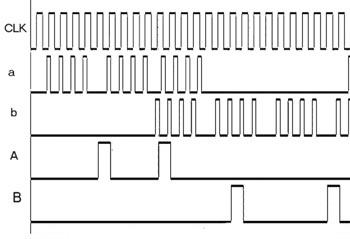
Рисунок 3. Сигналы на выходах (а, b) и выходах (A, B) последовательного петлевого фильтра
Последовательные петлевые фильтры
Фильтр случайных блужданий
Фильтр случайных блужданий (ФСБ), который хорошо известен, является последовательным фильтром, состоящим из реверсивного счётчика с длиной 2N+1. Значение счётчика увеличивается или уменьшается только одним из входных сигналов «a» или «b», соответственно (рис. 4). Импульсы на выходах «A» или «B» возникают только тогда, когда значение счётчика достигнет +N или -N, соответственно. В этом случае счётчик сбрасывается в 0, и цикл повторяется. Таким образом, для формирования одного выходного импульса требуется как минимум N входных. Максимальное время формирования выходного импульса будет достигнуто при вероятностях появления входных сигналов «a» и «b», равных 0,5. В дальнейшем будем называть рассмотренный фильтр «ФСБ со значением сброса 0».
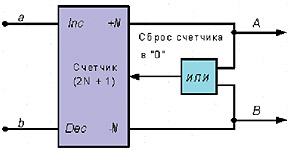
Рисунок 4. Фильтр случайных блужданий со значением сброса «0»
Фильтр случайных блужданий с изменяющимся значением сброса
После установления равенства фаз выходного и входного сигналов цифровая система ФАПЧ, в которой отсутствует накопление (или память) управляющих сигналов, больше не обеспечивает управления, то есть в случае сдвига частоты входного сигнала относительно собственной частоты петли ФАПЧ фаза выходного сигнала не может иметь то же математическое ожидание, что и фаза входного сигнала. Значение фазы выходного сигнала в этом случае будет смещено относительно математического ожидания фазы входного сигнала. Величина этого смещения будет зависеть от взаимного сдвига частот и дрожания фазы входного сигнала. Явление такого же рода наблюдается и в аналоговых системах ФАПЧ, имеющих достаточно низкие уровни усиления в петле обратной связи. В случае же увеличения уровня усиления в петле обратной связи, расширяется полоса захвата, однако ухудшается подавление дрожания фазы входного сигнала, что приводит к увеличению дрожания фазы выходного сигнала. Цифровые системы ФАПЧ имеют то же соотношение между их полосой захвата и возможностью подавления дрожания фазы. Рассматриваемый новый тип последовательных фильтров позволяет улучшить эти характеристики цифровых систем ФАПЧ.
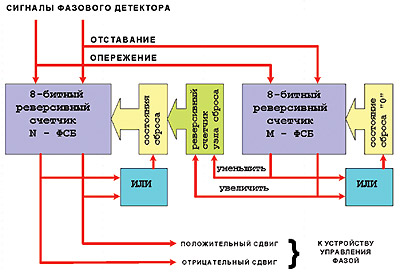
Рисунок 5. Блок-схема фильтра с переменным значением сброса
Такой последовательный фильтр представлен на рис. 5 и состоит из двух ФСБ и узла сброса. M-ФСБ длины 2M+1 является ФСБ со значением сброса 0, описанным выше, в то время как N-ФСБ длины 2N+1 имеет несколько значений сброса, зависящих от состояния регистра узла сброса. Сигналы «опережение» и «отставание» подсчитываются в обоих ФСБ независимо друг от друга. Фильтр работает следующим образом. Содержимое узла сброса увеличивается или уменьшается на единицу одним из сигналов «увеличить» или «уменьшить», соответственно, поступающих из M-ФСБ. N-ФСБ устанавливается при сбросе в соответствующее состояние, в зависимости от содержимого регистра узла сброса, значение которого изменяется импульсом на положительном или отрицательном выходе N-ФСБ. Если M-ФСБ и N-ФСБ формируют выходные сигналы одновременно, то сначала сбрасывается N-ФСБ, а затем меняется содержимое регистра узла сброса.
Соотношения между состояниями, в которые устанавливается при сбросе N-ФСБ, и содержимым регистра узла сброса показаны на рис. 6.
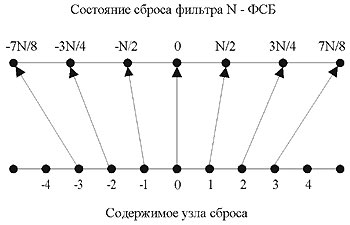
Рисунок 6. Соотношения между состояниями, в которые устанавливается при сбросе N-ФСБ, и содержимым регистра узла сброса
M-ФСБ является «ФСБ со значением сброса 0», поэтому содержимое регистра узла сброса меняется до тех пор, пока выходная фаза не окажется в центральной части функции плотности распределения входной фазы. Иначе говоря, состояние, в которое устанавливается N-ФСБ, при сбросе меняется до тех пор, пока функция распределения плотности вероятности фазового компаратора не станет симметричной. В этом случае сигналы на выходах M-ФСБ не будут появляться. Последовательный фильтр, показанный на рис. 5, называется фильтром случайных блужданий с переменным значением сброса.
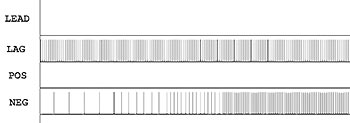
Рисунок 7. Сигналы на входе (Lead, Lag) и на выходе (POS, NEG) фильтра случайных блужданий с переменным значением сброса при наличии на входе петли ФАПЧ сигналов с постоянным фазовым рассогласованием
Для получения характеристик цифровых систем ФАПЧ на языке Verilog были описаны модели систем с двумя типами фильтров: «ФСБ со значением сброса 0» и «ФСБ с переменным значением сброса» — и проведено моделирование (исходные тексты модулей ФАПЧ на языке Verilog доступны по ссылке www.evm90.com/dpll/dpll.zip). Временные диаграммы в характерных точках цифровых систем ФАПЧ приведены на рис. 2, 3 и >7. Рис. 7 отражает «поведение» фильтра при наличии на входе системы постоянного фазового рассогласования (например, при разомкнутом контуре регулирования).
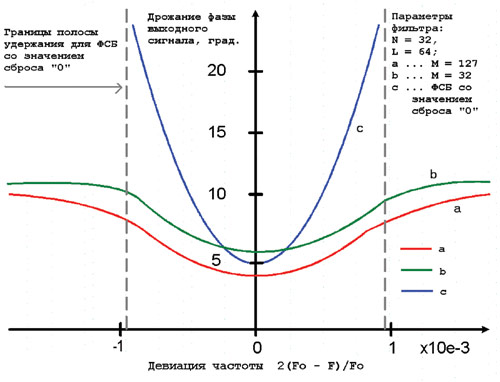
Рисунок 8. Зависимости среднего значения модуля дрожания фазы выходного сигнала от девиации частоты
При исследовании эффекта подавления дрожания фазы входного сигнала был проведён сравнительный анализ цифровых систем ФАПЧ и получены зависимости среднего значения модуля дрожания фазы выходного сигнала от девиации частоты (рис. 8) для ФСБ со значением сброса 0 и для ФСБ с переменным значением сброса при длинах M-ФСБ 127 и 32 (M = 127; N = 32) и при длине N-ФСБ, равной 32 (N = 32). Известно, что дрожание фазы выходного сигнала возрастает с ростом длины ФСБ со значением сброса 0 [4]. Видно, что системы ФАПЧ с ФСБ с переменным значением сброса и с ФСБ со значением сброса 0 имеют сходные характеристики по подавлению дрожания фазы входного сигнала. Кроме того, при отклонении частоты входного сигнала система с ФСБ с переменным значением сброса гораздо лучше справляется с дрожанием фазы входного сигнала, нежели система с ФСБ со значением сброса 0. Кривые зависимости дрожания фазы выходного сигнала от дрожания фазы входного для трёх значений отклонения частоты D f представлены на рис. 9. Заметим, что характеристики системы ФАПЧ с ФСБ с переменным значением сброса практически не зависят от дрожания фазы выходного сигнала.
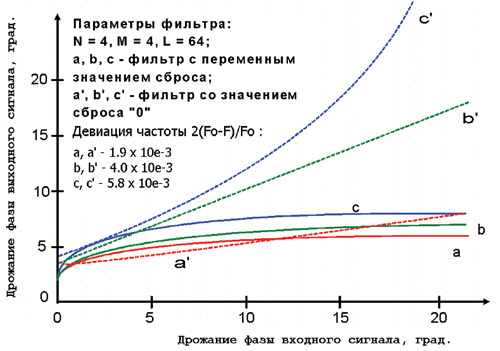
Рисунок 9. Кривые зависимости дрожания фазы выходного сигнала от дрожания фазы входного для трёх значений отклонения частоты D f
Ширина полосы удержания для системы ФАПЧ с ФСБ со значением сброса 0:
а для системы с ФСБ с переменным значением сброса:
то есть в этом случае ширина полосы удержания не зависит от параметров фильтра [5].
Другой полезной характеристикой систем ФАПЧ является ширина полосы захвата. В случае, когда петля ФАПЧ не синхронизирована, разность фаз входного и выходного сигналов непрерывно меняется. Наиболее неподходящий момент для захвата принят за начальное состояние (рис. 10). Таким образом, если длина N-ФСБ слишком велика в сравнении с L, то сигнал на выходе N-ФСБ при определённых условиях не будет сформирован. Если нужное количество необходимых для захвата импульсов не поступит на вход N-ФСБ за время, пока фазы входного и выходного сигналов не будут расходиться на 180º, содержимое N-ФСБ будет принимать два значения ±(N – 1) без смены значения сброса, и тогда система ФАПЧ не сможет синхронизироваться. Значение ширины полосы захвата задаётся следующим соотношением [5]:
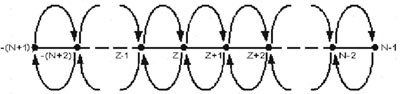
Рисунок 10. Диаграмма переходов между состояниями для фильтра «N-ФСБ»
Отметим, что с помощью дополнительных цепей, управляющих N-ФСБ во время захвата, можно добиться равенства полос захвата и удержания.
При анализе времени захвата в отсутствии шума за начальное было принято нулевое состояние (рис. 6). В результате моделирования были получены кривые зависимости времени захвата от начальной фазы системы ФАПЧ (рис. 11). На время захвата также оказывает влияние длина M-ФСБ. Из приведённых зависимостей видно, что система ФАПЧ, имеющая ФСБ с переменным значением сброса, при M = 32 и = 45º обеспечивает в 2,5 раза меньшее время захвата, по сравнению с системой, имеющей ФСБ со значением сброса 0.
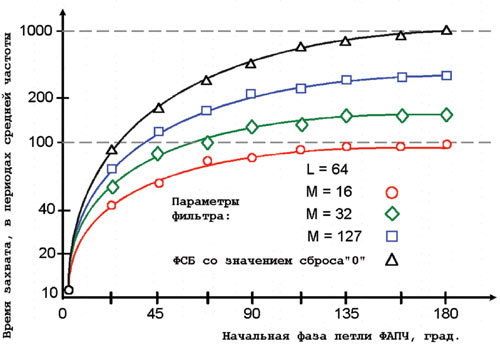
Рисунок 11. Кривые зависимости времени захвата от начальной фазы системы ФАПЧ
В настоящее время в системах связи присутствует целый ряд искажений, связанных с дрожанием фазы, например, нестабильность в системах выделения синхроимпульсов, случайные фазовые флуктуации, вызванные многократной ретрансляцией радиосигнала и т.п. В любом случае, дрожание фазы носит в основном характер медленных изменений. Цифровая система ФАПЧ является для фазовых дрожаний низкочастотным фильтром, поэтому подавление высокочастотных составляющих фазовых дрожаний сравнительно просто. Однако длину фильтра ФАПЧ или коэффициент деления выходной частоты необходимо делать сравнительно большими для подавления дрожаний, сильно коррелированных на длительном интервале времени. Такие приёмы могут быть использованы лишь в ущерб ширине полосы удержания и времени захвата.
Ширина полосы приведённой в работе системы цифровой системы ФАПЧ практически не зависит от длины фильтра. Более того, достигнуто сравнительно малое время захвата и хорошие характеристики подавления дрожаний фазы при отклонениях частоты. Достигнутые характеристики безусловно позволяют применять подобные узлы в системах связи и управления.
- Системы фазовой синхронизации с элементами дискретизации. 2-е изд., доп. и перераб./ В.В. Шахгильдян, А.А. Ляховкин, В.Л. Карякин и др.; Под ред. В.В. Шахгильдяна. М.: Радио и связь, 1989. 320 с.
- Pasternak G., Whalin R.L. Analysis and synthesis of a digital phase-locked loop for FM demodulation // Bell Syst. Tech. J. 1968. Dec. P. 97–105.
- Cessna J.R., Levy D.M. Phase noise and transient times for a binary quantized digital phase-locked loop in which Gaussian noise // IEEE Trans. 1972. V. Com-20. № 2. P. 94–104.
- Yukawa J., Mori S. A binary quantized digital phase-locked loop // IECE. 1973. Vol. 56-A. № 12. P. 79–85.
- Yamamoto H., Mori S. Performance of a binary quantized all digital phase-locked loop with a new class of sequential filter // IEEE Trans. 1978. V. Com-26. № 1. P. 35–45.
| Реклама на сайте тел.: +7 (495) 514 4110. e-mail:admin@eust.ru 1998-2014 ООО Рынок микроэлектроники |
ФАЗОВАЯ АВТОПОДСТРОЙКА ПРИЕМНЫХ КАНАЛОВ СИСТЕМ СПУТНИКОВОЙ СВЯЗИ Текст научной статьи по специальности «Электротехника, электронная техника, информационные технологии»
Аннотация научной статьи по электротехнике, электронной технике, информационным технологиям, автор научной работы — Кузьмин Руслан Эдуардович
Системы фазовой автоподстройки (ФАП) могут стать серьёзным шагом в цифровой обработке как принимаемых, так и передаваемых радиосигналов. Кольца ФАП, построенные на современных микропроцессорах или программируемых логических интегральных схемах (ПЛИС) в составе цифровых блоков малоэлементных ФАР (фазированных антенных решеток), позволят повысить точность фазирования, заменив традиционные фазовращатели. Такие системы могут применяться в метровом, дециметровом и части сантиметрового диапазона длин волн.
i Надоели баннеры? Вы всегда можете отключить рекламу.
Похожие темы научных работ по электротехнике, электронной технике, информационным технологиям , автор научной работы — Кузьмин Руслан Эдуардович
Цифровой приемо-передающий модуль активной фазированной антенной решетки
СПОСОБ БЫСТРОЙ ЦИФРОВОЙ ФАЗОВОЙ АВТОПОДСТРОЙКИ ЧАСТОТЫ ДЛЯ ОПТИМАЛЬНОЙ КОГЕРЕНТНОЙ ОБРАБОТКИ РАДИОСИГНАЛОВ В НИЗКООРБИТАЛЬНЫХ СПУТНИКОВЫХ СИСТЕМАХ СВЯЗИ (НССС)
Стабилизация частоты генератора сигналов г4-207
Особенности построения электропривода сканирующего устройства с цифровым контуром фазовой синхронизации скорости
Цифровой приемо–передающий модуль активной фазированной антенной решетки
i Не можете найти то, что вам нужно? Попробуйте сервис подбора литературы.
i Надоели баннеры? Вы всегда можете отключить рекламу.
PHASE LOCKED LOOP OF SATELLITE COMMUNICATION SYSTEMS RECEIVING CHANNELS
The article considers the receiving channels phase synchronization method of a satellite subscriber terminal with two receiving antennas. Such a method allows us to solve the problem of raising the signal level in the subscriber system against the background of noise. For the possibility of in-phase addition of signals of two channels before demodulation, it is necessary to eliminate the phase difference between them, which arises due to the spacing of the antenna pair elements by at least a quarter of the wavelength. It guarantees the independence from noise in each of them. To eliminate the phase difference, a phase-locked loop (PLL) system of receiving channels with a quadrature modulator is employed. Such scheme is a full-fledged substitute for the phase-shifter or digital phase rotation algorithm. While working with the system model, an imitation model was constructed from two receiving channels of a satellite communication system with phase-locked auto-tuning. It is shown that the system allows increase the level of the valid output signal by implementing the PLL ring. The effect of the low-pass filter band on the system speed was studied, and the dependence of the phase error at the output from the signal-to-noise ratio was obtained. In the long term, this system can ensure the operation of both the receiving and transmitting parts of the communication module with the antenna array of several elements.
Текст научной работы на тему «ФАЗОВАЯ АВТОПОДСТРОЙКА ПРИЕМНЫХ КАНАЛОВ СИСТЕМ СПУТНИКОВОЙ СВЯЗИ»
Труды МАИ. Выпуск № 99
Фазовая автоподстройка приемных каналов
систем спутниковой связи Кузьмин Р.Э.
Московский авиационный институт (национальный исследовательский университет), МАИ, Волоколамское шоссе, 4, Москва, A-80, ГСП-3, 125993, Россия
Системы фазовой автоподстройки (ФАП) могут стать серьёзным шагом в цифровой обработке как принимаемых, так и передаваемых радиосигналов. Кольца ФАП, построенные на современных микропроцессорах или программируемых логических интегральных схемах (ПЛИС) в составе цифровых блоков малоэлементных ФАР (фазированных антенных решеток), позволят повысить точность фазирования, заменив традиционные фазовращатели. Такие системы могут применяться в метровом, дециметровом и части сантиметрового диапазона длин волн.
Ключевые слова: фазовая автоподстройка, фазированная антенная решетка, квадратура, фазовый детектор.
В современных системах подвижной спутниковой связи абонентский терминал представляет собой приемо-передатчик, который при помощи компьютера может работать с речевым трафиком, а также с трафиком данных. Однако используемая модель абонентского терминала работает в штатном режиме при отношении сигнал/шум (ОСШ) равным 13 дБ. При модуляции ОМБК (гауссова манипуляция с минимальным частотным сдвигом) от этого отношения зависит скорость передачи информации. При ОСШ равным 13дБ терминал может принимать сигналы на скорости до 59 кбит/с, однако при изменении помеховой обстановки или в связи с взаимным движением друг относительно друга абонента и спутникового ретранслятора, ОСШ может ухудшиться, что приведет к ухудшению качества принимаемого сигнала, или сделает невозможным корректную демодуляцию.
Задача увеличения уровня сигнала может быть решена в абонентском терминале с несколькими приемными каналами от нескольких антенн, однако в такой системе сразу возникает задача когерентного сложения сигналов. Фазовая стабилизация каналов в антенных решетках осуществляется при помощи цифровых дискретных фазовращателей, с поворотом фазы на фиксированную величину. При необходимости плавной перестройки фазы в фидерном тракте придется прибегать к сложной системе фазовращателей с адаптивным алгоритмом управления [4]. Альтернативой фазовращателю может быть кольцо фазовой автоподстройки (ФАП), которое синхронизирует опорный сигнал одного приемного канала с результирующим колебательным процессом на выходе другого канала с помощью цепи обратной связи.
В радиотехнике широко распространены две системы автоподстройки частоты: частотная (ЧАП) и фазовая (ФАПЧ). Различие систем состоит в том, что в ЧАП сигнал ошибки связан с разностью частот эталонного и подстраиваемого генераторов, а в системе ФАПЧ с разностью их фаз. Поэтому в системе ФАПЧ в стационарном режиме поддерживается разность фаз, а не частот, как в системе ЧАП. Эта особенность расширяет возможности применения системы ФАПЧ.
Известны различные модификации системы ФАПЧ: однопетлевые и многопетлевые, с простым и комбинированным управлением и т.д. В данной статье будет использоваться стандартная однопетлевая система ФАПЧ. По своей структуре она представляет собой следящую систему автоматического регулирования с одним «входом», одним «выходом», и однопетлевой обратной связью. Объектом регулирования здесь является подстраиваемый генератор (ПГ), причём сигнал управления воздействует только на частоту (или фазу) его автоколебаний [1]. Математическая модель такой системы ФАПЧ может быть записана в операторной форме [2] [3].
Принцип работы кольца ФАПЧ, можно описать следующим образом. Периодические колебания, с выхода генератора с текущей фазой сравниваются в фазовом детекторе (ФД) с колебаниями опорного сигнала с текущей фазой . Результатом сравнения на выходе ФД является сигнал, зависящий от разности фаз Д^ = — , который после прохождения фильтра подается на управляющий элемент. Управляющий элемент изменяет частоту генератора в сторону уменьшения фазового рассогласования Д^.
О — максимальная расстройка по частоте, которую может скомпенсировать цепь управления, рад/с;
‘Пн — начальная частотная расстройка колебаний, рад/с; К(р) — коэффициент передачи фильтра в операторной форме; Б(ф) — нормированная характеристика фазового детектора.
Нелинейные свойства уравнения определяются нелинейной характеристикой фазового детектора, а инерционные зависят от фильтра в цепи управления. В зависимости от типа используемого фильтра из исходного уравнения могут быть получены различные математические модели. Функциональная схема кольца автоподстройки, описанная в (1) приведена на рисунке 1; для увеличения динамического диапазона кольца в его состав введён усилитель постоянного тока
Рисунок 1 — Типовое кольцо ФАПЧ В системе ФАП имеется петлевой фильтр (ПФ) выполненный как фильтр нижних частот (ФНЧ). Основной задачей ПФ является улучшенная фильтрация по частоте в полосе удержания синхронного режима. Существуют варианты ФАП без ПФ, они отличаются меньшим временем вхождения в синхронный режим, однако точность подстройки фазы в таких кольцах ниже. Полоса частот, в которой кольцо, изначально находясь в режиме биений, может войти в синхронный режим, называется полосой захвата синхронного режима. Полоса частот, в которой кольцо ФАП при изменении параметров входного сигнала сохраняет синхронный режим работы, называется полосой удержания.
3. Фазовая автоподстройка приемных каналов систем спутниковой связи Приемная система спутниковой связи, состоящая из двух каналов, использующая фазовую автоподстройку на базе кольца ФАП второго порядка изображена на рисунке 2.
Рисунок 2 — Схема фазовой автоподстройки двух каналов Часть сигнала со входа 1 канала, принимаемая за опорное колебание, поступает на один вход ФД. Сигнал с входа 2 приходит на ФД после обработки в квадратурном модуляторе (КМ), где осуществляется подстройка фазы регулируемого сигнала в этом канале. Управляющим элементом квадратурного модулятора является формирователь квадратурной огибающей на который
поступает сигнал ошибки с выхода ФД отфильтрованный ФНЧ.
Колебания на входах соответствующих каналов можно записать, как
где 51 (¿) — опорный сигнал в канале 1; — фаза опорного сигнала, рад; -круговая частота сигнала, рад/с.
52(0 = и со5(^ + — Дфш), (3)
где 52(0 — сигнал в канале 2; Дфш — фазовая ошибка, рад.
Перед подачей на вход фазового детектора колебание с опорной фазой задерживается системой на 900, чтобы сформировать несимметричную дискриминационную характеристику. Сигнал на выходе ФД будет выглядеть следующим образом:
5^(0 = и 5т(^ + X С05(^ + фкт) (4)
где фкт — управляемая сигналом ФД фаза сигнала КМ, рад;
Высокочастотная составляющая сигнала ошибки отфильтруется в ФНЧ, тогда на входах сумматора КМ сформируются два сигнала:
^т5 1 п(0 = и 5 1 П (+ ( 1 — А фш) X 5 1 П(( ! — фкт) = (5)
^ ( с о 5 ( + ф кт — А 0ш) — с о 5 ( + 2 ( 1 — ф кт — А 0ш).
^тс о 5( 0 = и С О 5 ( + ( 1 — А 0ш) X С О 5 ( ( 1 — ф кт) = (6)
^ ( С О 5 ( + ф кт — А фщ) + С О 5 ( + 2 ( 1 — ф кт — А 0ш).
На выходе квадратурного модулятора будет сигнал равный сумме сигналов (5)
5КМ (0 = и С О 5 + ф кт — А фцО ■ (7)
В связи со свойствами кольца ФАП фаза этого сигнала ф кт — А фш через некоторое время, называемое временем вхождения в синхронный режим, станет равной фазе сигнала опорного канала ( 1 с ошибкой А ф ф ап. Мощность сигнала после сложения колебаний двух каналов увеличивается в два раза, а мощность шумового воздействия, в связи с независимостью шумов на входе каждого из трактов, останется неизменной или даже несколько снизится, что увеличит минимум в два раза отношение сигнал/шум на выходе системы.
4. Моделирование схемы фазовой автоподстройки в МаШЬ 81шиИпк
Проведено имитационное моделирование системы фазовой автоподстройки двух каналов, имеющих начальную фиксированную расстройку по фазе и независимость аддитивных шумовых воздействий в каждом канале, при этом «Канал 1» выбран опорным (рисунок 3). На выходе фазового детектора формируется сигнал пропорциональный разности фаз опорного и подстраиваемого канала «Канал 2». В состав модели входят ФНЧ и усилитель постоянного тока (УПТ). Сложение
выходного колебания квадратурного модулятора и колебаний из «Канала 1» происходит в блоке «Add».
Рисунок 3 — Имитационная модель системы фазирования каналов Эпюры опорного колебания изображены на графике «А» рисунка 4.
2 2.05 2.1 2.15 2.2 2.25 2.3 2.35 2.4 2.45 2.5 Т, С
Рисунок 4 — Эпюры напряжений в системе фазовой автоподстройки каналов.
На графике «В» — эпюры колебания, приходящего на вход «1п2» квадратурного модулятора; Фаза этого колебания отличается на 3 радиана от фазы опорного канала (график «А»). На графике «С» изображен косинус на выходе квадратурного модулятора. На графике «С» видно, что фаза пришедшего на
квадратурный модулятор косинуса, стала повторять с определенной точностью фазу косинуса в канале принятом за эталонный.
На рисунке 5 приведены эпюры напряжения аналогичные рисунку 4, с отношением сигнал/шум на входе системы равным 5 децибелам.
Рисунок 5 — Эпюры напряжений в системе фазовой автоподстройки с шумом
После синхронизации фаз в каждом из каналов сигналы из эталонного и подстраиваемого каналов складываются перед демодуляцией. Сложение сигналов благодаря случайному характеру шума в каждом из каналов, позволит улучшить отношение сигнал/шум на входе демодулятора, тем самым снизив вероятность ошибки.
На основании проведенных исследований имитационной модели кольца ФАП и имитационной модели схемы на ее основе, можно сделать вывод о том, что кольцо при относительной стабильности частоты входного сигнала может достаточно точно следить за его фазой. Возможно создать диаграммообразующую структуру (ДОС) на
основе колец ФАП. Такая ДОС будет состоять из N вибраторов разнесенных на некоторое расстояние, каждый вибратор будет связан со своим линейным трактом приемо-передатчика. Один из вибраторов будет выбираться в качестве опорного, после чего фазовый набег сигналов, обусловленный разностью хода лучей до каждого из вибраторов системы, пришедших на другие вибраторы, будет подстраиваться под фазовый набег в канале, выбранном основным. Для этого будут использоваться кольца ФАП, которые будут подстраиваться под разность фаз сигналов пришедших на основной и не основной канал, после чего фаза сигнала будет поворачиваться на эту разность. Синфазные после поворота фазы сигналы будут складываться перед подачей на демодулятор, тем самым увеличивая отношение сигнал/шум на входе демодулятора. Также возможно использовать в качестве эталона сигнал с «чистой» промежуточной частотой без начального фазового набега и какой-либо информации. Такой сигнал будет формироваться самим приемным устройством. При таком варианте синхронизации начальная фаза каждого сигнала, пришедшего на элементы антенной системы будет подстраиваться под начальную фазу сформированного приемником сигнала, без шумов, благодаря свойствам кольца ФАП система сможет подстроиться не только фазу входного сигнала под фазу сигнала эталонной частоты, но и нейтрализовать доплеровское смещение несущей частоты, и смещения обусловленные нестабильностями вносимыми в сигнал на всем пути его формирования, преобразования и передачи.
В ходе исследования модели была проведена качественная оценка сложения сигналов взятых в двух каналах, разность фаз между ними на момент подачи в систему синхронизации составляла 3 радиан. Для оценки эффективности работы
системы, было проведено сложение сигналов перед подачей подстраиваемого сигнала в систему и после согласования начальной фазы обрабатываемого сигнала, с фазой опорного сигнала.
На рисунке 6 показан результат сложение опорного и подстраиваемого сигналов до и после синхронизации их фаз. На осциллограмме А представлена сумма совпадающих по фазе сигналов, на осциллограмме В сумма сигналов имеющих начальную разность фаз, отношение сигнал/шум в канале составляет 5дБ.
0.5- т-п— Л ^ 1 п п п п -т- -4- 1 п п ГГ (Л ^ ^ Л н
2.9 2.91 2.92 2.93 2.94 2.95 2.96 2.97 2.93 2 99 3 Т. С
Рисунок 6 — сложение синхронизированных по фазе сигналов на выходе системы В ходе работы с имитационной моделью было выявлено, что наибольшее влияние на время вхождения системы в синхронный режим оказывает ширина полосы пропускания ФНЧ. В качестве этого фильтра был взят фильтр Чебышева второго рода. На рисунке 7 приведён график зависимости времени синхронизации сигналов Тср от ширины полосы пропускания фильтра Д1Лиф. Для оценки времени вхождения в синхронный режим применялся сигнал со ступенчато-изменяющейся частотой. Признаком окончания процесса служило достижение 90% синхронности
входного и опорного колебаний. Для чего осуществлялось наблюдение за управляющим сигналом системы, повторяющим сигнал управляющий параметрами входного колебания.
Так как в имитационной модели используются идеализированные представления отдельных блоков, то ошибки, связанные с обработкой сигнала и в частности с фазовыми шумами в системе отсутствуют
Рисунок 7 — Время вхождения в синхронный режим Известно, что кольцо ФАП используется в качестве фильтра, подавляющего фазовые шумы [5], однако все его элементы сами вносят определенный вклад в уровень выходных шумов. Для учета влияния шума на точность фазовой подстройки в ходе исследований была специально введена случайная ошибка, путём ухудшения отношения сигнал/шум (БМ^) на входе кольца ФАП. Зависимость дисперсии ошибки слежения за фазой ОфЭ, обусловленной шумовым воздействием на входной сигнал, от SNR представлена на рисунке 8.
Для расчёта фазовой ошибки использовался косвенный метод, основанный на анализе управляющего сигнала кольца ФАП. Зависимость, изображенная на рисунке, показывает, что с уменьшением отношения сигнал/шум (SNR) происходит ухудшение качества фазовой синхронизации.
0.11 0.1 0.09 0.08 0.07 0.06 0.05 0.04 0.03 0.02
Рисунок 8 — Ошибка слежения за фазой
При этом система продолжает работать, хоть и со сниженной точностью. Например, при отношении сигнал/шум всего в 5 децибел ошибка фазовой синхронизации не превышает 0.12 радиан. Сложение колебаний при таком уровне ошибки фазовой синхронизации не окажет серьёзного влияния на мощность результирующего сигнала.
Фазовая автоподстройка может осуществлять синхронизацию фаз принимаемых сигналов в антенных решетках систем подвижной спутниковой связи. Тогда абонентский терминал сможет принимать сигналы несколькими антеннами
без использования фазовращателей и, при необходимости, осуществлять первоначальную настройку абонентской антенной системы на источник сигнала.
Построена имитационная модель из двух приемных каналов системы спутниковой связи с фазовой автоподстройкой; показано, что система позволяет повышать уровень выходного полезного сигнала на выходе за счет использования кольца ФАП. Исследовано влияние полосы ФНЧ на быстродействие системы, а также получены зависимости фазовой ошибки от отношения сигнал/шум в каналах. Данная система может выступать аналогом фазовращателей в диапазоне 0.3 — 4 ГГц [6, 7], для систем не требующих высокого коэффициента усиления антенны. Также система проще в изготовлении монтаже и эксплуатации, чем современные антенные решетки [8 — 20], за счёт того, что омни-антенны из которых состоит сама антенная система не нуждаются в первоначальной настройке и калибровке.
Возможности такой системы не ограничиваются только работой в приёмном тракте, при наличии системы ФАП во время сеанса связи можно формировать узкий луч в режиме передачи.
1. Шахгильдян В.В., Ляховкин А.А. Системы фазовой автоподстройки частоты. -М.: Связь, 1972. — 447 с.
2. Мартиросов В.Е. Оптимальный прием дискретных сигналов ЦСПИ. — М.: Радиотехника, 2010. — 208 с.
3. Мартиросов В.Е., Алексеев Г.А. Программная реализация системы фазовой автоподстройки частоты // Труды МАИ. 2013. № 71. URL: https://www. mai.ru/science/trudy/published.php?ID=47082
4. Воскресенский Д.И., Канащенков А.П. Активные фазированные антенные решетки. — М.: Радиотехника, 2004. — 488 с.
5. Добычина Е.М. Фазовые шумы синтезаторов частот // Вестник Московского авиационного института. 2009. Т.16. № 3. С. 69 — 76.
6. Pei-Ling Chi, Chia-Ling Huang. Reconfigurable 1.5-2.5-GHz phase shifter with 360 relative phase-shift range and reduced insertion-loss variation // IEEE MTT- S, International Microware Simposium (IMS), Honolulu, 4-9 June 2017, pp. 897 — 899.
7. Li Wenyuan, Wang Wan, Chen Yang. A 0.5-3GHz true-time-delay phase shifter for multi-antenna systems // IEEE 2nd Advanced Information Technology, Electronic and Automation Control Conference, (IAEAC), Chongqing, 25.03 — 26.03, 2017, pp. 506 -509.
i Не можете найти то, что вам нужно? Попробуйте сервис подбора литературы.
8. Mircea Dragoman, Martino Aldrigo, Gina Adam. Phased antenna arrays based on non-volatile resistive switches // IET Microwaves, Antennas & Propagation, 2017, vol. 11, issue 8, pp. 1169 — 1173.
9. Ya-Qing Wen, Bing-Zhong Wang, Xiao Ding. Wide-beam circularity polarized microstrip magnetic-electric dipole antenna for wide angel scanning phased array // IEEE Antennas and wireless propagation letters, 2017, vol. 16, pp. 428 — 431.
10. Pandhare R.A., Zade P.L., Abegaonkar M.P. Beam-steering in microstrip patch antenna array using DGS based phaseshifters at 5.2 GHz 2015 // International conference on information processing (ICIP), 2015, pp. 239 — 243.
11. Hidayat R., Rushedra., Ellisa Agustina. Digital beamforming of smart antenna in millimeter wave communications // International Conference on broadband communications, wireless sensors and powering (BCWSP), 2017, pp. 1 — 5.
12. Gerhard F. Hamberger, Uwe Siart, Thomas F. Fibert. A dual-linearly polarized receive antenna array for digital beamforming in automotive use // IEEE Asia Pacific microwave conference (APMC), 2017, pp. 17 — 20.
13. Narbudowicz A., Ammann M.J., Plotka M., Kulas L., Nyka K., Rzymowski M. Compact antenna for digital beamforming with software define radios // International symposium on antennas and propagation (ISAP), 2017, Phuket, Thailand, doi: 10.1109/ISANP.2017.8228737
14. Pratumsiri T., Janpugdee P., Flexible printed antenna for digital TV reception // International symposium on antennas and propagation (ISAP), 2017, pp. 1 — 2.
15. Li A., Masouros C., Sellathurai M., Analog-digital beamforming in the MU-MISO downlink by use of tunable antenna loads // IEEE transaction on Vehicular technology, 2018, vol. 67, Issue 4, pp. 3114 — 3129.
16. Dinis D.C., Oliveira A.S.R., Vieira J. All-digital transmitter based antenna array with reduced hardware complexity // IEEE MTT — S International microwave symposium (IMS), 2017, pp. 153 — 156.
17. Haroun M.H., Ayad H., Jomaa J., Fadlallah M., Jomaa K., Fabres M.C., Bataller M.F. Sampled antenna array digital beamforming for LTE-advanced // International conference on High performance computing and simulation (HPCS), 2017, pp. 282 — 287
18. Chiou Shiue-Chen, Lin Yu-Ming, Tai Tzu-Chun, Chen Yung-Wei, Hung Cheng-Yuan, Wu Hung-Wei, Chang Shoou-Jin, Wang Yeong-Her, Su Yan-Kuin. Hight
efficiency transparent digital television antenna based on nano structured thin film coating technology // International conference on Applied system innovation (ICASI), 2017, pp. 500 — 502.
19. Jagadesh T., Sheela Rani B. Actualization of a phased array antenna utilizing digital beamforming // International conference on control instrumentation and computational technologies (ICCICCT), 2016, pp. 111 — 116.
20. Khedekar S., Mukhopadhyay M. Digital beamforming to reduce antenna side lobes and minimize DOA error // International conference on signal processing communication, power and embedded systems (SCOPES), 2016, pp. 1578 — 1583.
Несколько слов о системе ФАПЧ: фазовая автоподстройка частоты


Система ФАПЧ находит широкое применение, ей посвящено много книг и статей (например, последних публикаций [1–5]), однако, по-видимому, есть необходимость подытожить некоторые положения, чтобы не заблудиться в обилии литературных источников. Автор предлагает читателям свои «несколько слов», полагая, что они будут полезными.
Система ФАПЧ находит широкое применение, ей посвящено много книг и статей (например, последних публикаций [1–5]), однако, по-видимому, есть необходимость подытожить некоторые положения, чтобы не заблудиться в обилии литературных источников. Автор предлагает читателям свои «несколько слов», полагая, что они будут полезными.
Основными элементами системы ФАПЧ (фазовой автоподстройки частоты) являются фазовый детектор (ФД), на один из входов которого подается управляющий сигнал, и управляемый генератор (УГ), вход которого подключен к выходу ФД, а выход — к другому входу ФД. В большинстве случаев в составе системы ФАПЧ используется также фильтр (Ф), включаемый между выходом ФД и входом УГ и определяющий во многом ее частотные свойства. Кроме того, от типа фильтра зависит режим системы — статический или астатический, с погрешностью или без погрешности по фазе. Существенной особенностью системы ФАПЧ, отличающей ее от большинства других систем автоматического регулирования, является то, что выходной величиной УГ является частота, а входной величиной ФД — разность фаз управляющего сигнала и сигнала обратной связи, поступающего с выхода УГ. В результате, в системе ФАПЧ эквивалентно присутствует еще один элемент — интегратор (в составе ФД). Ниже рассмотрены некоторые особенности системы ФАПЧ. При рассмотрении частично использованы материалы автора [3]. Некоторые из суждений являются новыми.
Фильтрующие свойства системы ФАПЧ
На рис. 1, а приведена схема простейшего устройства, использующего систему ФАПЧ и предназначенного для фильтрации нижних частот (ФНЧ). Однако это не просто ФНЧ. Это ФНЧ для сигнала, носителем информации и, соответственно, физической величиной которого является частота. Входным (на рис. 1, а) является сигнал на управляющем входе системы (на первом входе ФД), частота которого ωвх = ω0 + Δωвх, а выходным — сигнал на выходе УГ с ωвых(p) = ω0 + Δωвых(p), зависимой от передаточной функции устройства, аргументом которой является p = jΩ — комплексная частота. В то же время Ω является частотой изменения частоты ?вых, то есть частотой модуляции, если входной сигнал, например, модулирован по частоте. В данном случае можно говорить о способности системы ФАПЧ фильтровать модулирующую функцию ЧМ сигнала.

В обобщенном виде передаточная функция устройства по схеме на рис. 1, а, согласно [3], равна


— постоянная времени системы ФАПЧ (без учета kФ(p) — см. ниже), KФД и KУГ — коэффициенты передачи ФД и УГ. Причем KФД — с размерностью В/рад, а KУГ — (рад/с)/В, если выходной и входной величинами ФД и УГ, соответственно, является напряжение. Фильтр Ф характеризуется функцией

где KФ — коэффициент передачи фильтра на «нулевой» частоте (если фильтр — ФНЧ), а kФ(p) — его частотно-зависимый множитель (в операторной форме).
Передаточная функция бесфильтровой (при KФ(p) = 1) системы ФАПЧ, согласно (1), равна KФАПЧ(p) = 1/(1 + pτ0), где τ0 = 1/KФДKУГ, и представляет собой функцию ФНЧ 1-го порядка. Отметим, что этот 1-й порядок обусловлен указанной выше интегральной зависимостью фазы от частоты. В общем случае порядок системы ФАПЧ определяется единицей плюс порядок фильтра Ф.
На рис. 2, а приведена схема простейшего фильтра 1-го порядка, для которого, согласно (3),

где τФ = RФCФ — его постоянная времени. Для системы ФАПЧ с указанным фильтром, являющейся системой 2-го порядка,


— «собственная» частота и добротность системы.

Как следует из выражения (6), обе постоянные времени, τФ и τ0, влияют одинаково на Ω0, но на Q по-разному: увеличение τФ увеличивает добротность, а увеличение τ0 уменьшает ее. Отметим по аналогии с электрической RLC-цепью, что τФ и τ0 эквивалентны τL = L/R и τC = CR соответственно. В теории фильтров Ω0 называют частотой двух комплексно-сопряженных полюсов (на плоскости комплексной частоты p = jΩ), а вместо Q используют параметр σ1,2 = –Ω0/2Q, являющийся их вещественной координатой на этой плоскости [6]. Для рассматриваемого устройства, согласно (6),

Передаточная функция (5), а также другие, рассмотренные ниже, являются функциями полиномиальной фильтрации. Для некоторых из них (без усложненных полиномов в числителе) могут быть использованы аппроксимации характеристик по Бесселю, Чебышеву, эллиптическая и т. д. [6]. Система ФАПЧ может быть составной частью устройства, в котором осуществляется фильтрация, порядок которой превышает порядок системы.
Астатический режим системы ФАПЧ
Система ФАПЧ может быть статической или астатической (в последнем случае, с астатизмом 1-го или более высоких порядков). Статическая система ФАПЧ работает с фазовой ошибкой на входе ФД (в установившемся режиме). Ей пропорционально выходное напряжение ФД, являющееся управляющим для УГ (с учетом KФ фильтра Ф). Рассмотренные в предыдущем разделе устройства являются статическими. В отличие от статической, астатическая система ФАПЧ работает с ошибкой, равной нулю, но при этом напряжение на входе УГ равно той же величине, которая требуется для получения частоты на его выходе, равной частоте на входе системы ФАПЧ. Это обеспечивается применением в качестве Ф интегрирующего фильтра. Среднее значение его выходного напряжения является интегралом выходного напряжения ФД. После накопления требуемой величины напряжения на выходе Ф фазовая ошибка, в результате автоподстройки, сводится к нулю. В переходном режиме, при изменении частоты на входе системы ФАПЧ, появляется фазовая ошибка, вызывающая перестройку системы. В простейшем случае используется интегрирующий фильтр 1-го порядка, обеспечивающий в системе астатизм того же, 1-го, порядка (в системе ФАПЧ 2-го порядка). Возможно применение фильтров более высоких порядков, обеспечивающих, в зависимости от схемы построения, повышение порядка астатизма или дополнительную фильтрацию.
Простейшим интегрирующим фильтром является пропорционально-интегрирующая RC-цепь (рис. 2, в), подключенная к источнику сигнала, обладающему свойством источника тока (с бесконечно большим выходным сопротивлением). Интегрирование осуществляет конденсатор. На нем — напряжение, пропорциональное интегралу входного напряжения фильтра, а на резисторе — пропорциональное входному напряжению. Последний необходим для обеспечения устойчивости системы ФАПЧ. Резистор так же, как и конденсатор, влияет на частотные свойства системы.
Отметим следующее. Под интегрирующим фильтром будем понимать цепь, обладающую свойством не только фильтрации, но и интегрирования, а под пропорционально-интегрирующим — интегрирования, пропорциональной передачи сигнала и фильтрации. Термин «фильтр» в рассматриваемом случае применяется более широко («Ф» на рис. 1), и пропорционально-интегрирующую цепь (рис. 2, в) также называют фильтром. А обычный фильтр — это цепь, обеспечивающая фильтрацию без запоминания. Его можно считать «инерционным» фильтром (рис. 2, а). На рис. 2, б приведена схема фильтра, который, соответственно, является пропорционально-инерционным. А на рис. 2, г, д приведены схемы пропорционально-интегрирующих фильтров, которые дополнительно содержат цепи инерционной фильтрации.
Передаточная функция цепи по схеме на рис. 2, в описывается тем же общим выражением (3), для которого, в данном случае,

где τФ = RФCФ (при этом KФ(p) и KФ имеют размерность сопротивления, а KФД — А/рад). Отметим следующую особенность. Если для цепи на рис. 2, а постоянная времени τФ — это параметр, характеризующий ее инерционные свойства, то для цепи на рис. 2, б — это в какой-то степени условный параметр, так как напряжения, снимаемые с RФ и CФ, являются независимыми.
Передаточная функция системы ФАПЧ с указанным фильтром отличается от (5):

Основное отличие заключается в том, что второй член полинома в знаменателе (главного полинома передаточной функции) определяется постоянной времени τФ, а не τ0, в связи с чем

По сравнению со статической системой ФАПЧ можно сказать, что постоянные времени τ0 и τФ «поменялись местами», в результате чего τ0 обладает теми свойствами, которыми обладала τФ в статической системе. Отличием функции (8) является также и то, что в числителе дополнительно содержится член pτФ, влияющий на частотные свойства устройства (в области частоты среза ФНЧ).
Повышение порядка системы ФАПЧ
Повышение порядка системы ФАПЧ осуществляется повышением порядка фильтра Ф. На рис. 2, г, д приведены схемы интегрирующих фильтров 2-го и 3-го порядков, применение которых повышает порядок системы до 3-го и 4-го соответственно (при астатизме 1-го порядка). Следует отметить, что повышение порядка имеет специфику, обусловленную совместным применением фильтров (звеньев) разных типов — пропорционально-интегрирующего и инерционного.
Для фильтра 2-го порядка, состоящего из двух указанных звеньев (с буферной развязкой между ними), в соответствии с (3), (4) и (7),


Из (9) следует, что при условии τФ1 = τФ2 взаимно компенсируются свойства пропорциональности первого и инерционности второго звеньев, и рассматриваемый фильтр становится интегратором с kФ(p) = 1/pτФ1. При этом функция (10) превращается в функцию 2-го порядка

в полиноме которой отсутствует член первой степени. Функции (11) соответствует σ1,2 = 0, при которой система ФАПЧ неустойчива. Но при τФ2 Ф1 компенсация будет частичной, система будет 3-го порядка с отрицательными σ1 и σ2,3.
Для фильтра 2-го порядка по схеме на рис. 2, г, в котором конденсатор C2 шунтирует цепь R1C1, в отличие от (9),


σ1 и σ2,3 — отрицательны, а система ФАПЧ устойчива.
Передаточная функция фильтра 3-го порядка (рис. 2, д) имеет сложное выражение, но оно существенно упрощается, если цепь R2C3 достаточно высокоомна и практически не шунтирует предыдущую цепь. В этом случае

а передаточная функция системы ФАПЧ

Здесь, как и в первом случае с (9) и (10), при τФ1 = τФ3 система неустойчива. Необходимо, чтобы τФ3 < τФ1. При этом σ1,2 и σ3,4 будут отрицательны.
Отметим, что характерным для системы ФАПЧ с астатизмом 1-го порядка является наличие множителя (1 + 1/pτФ1) в передаточной функции фильтра, как, например, в (12) и (14), и то, что вторым членом полинома в знаменателе передаточной функции системы является pτФ1 (а не pτ0). Кроме того, функции (13) и (15) содержат множитель (1 + pτФ1), который свидетельствует о пропорциональной передаче сигнала (в пропорционально-интегрирующем фильтре).
Синтезаторы частот
Одно из применений системы ФАПЧ — в синтезаторах частот [1–5, 7, 8]. На рис. 1, б приведена структурная схема синтезатора, содержащего дополнительно два делителя частоты «1/R» и «1/N» — с коэффициентами деления R и N соответственно. Коэффициенты деления частоты могут переключаться, но в рабочем режиме синтезатора они постоянны. Известны разновидности синтезаторов — типа «Integer-N» (с целым коэффициентом деления N) и типа «Fractional-N» (с дробным).
Частота на выходе синтезатора (в установившемся режиме)

где ωФД = ωвх/R — частота на входе ФД. Разрешение синтезатора (дискретность перестройки частоты)

Постоянная времени синтезатора, в отличие от (2), равна

В результате, коэффициент деления N, который может достигать в синтезаторах типа «Integer-N» нескольких десятков тысяч, повышает их инерционность. А это приводит к увеличению времени перестройки синтезатора, что недопустимо в режиме быстрого переключения частоты, используемого в аппаратуре связи. Но в синтезаторах типа «Fractional-N» коэффициент N и, соответственно, постоянная времени τ0 могут быть в 1/ΔN раз меньше. Это является существенным преимуществом синтезаторов этого типа. Надо полагать, что устранение этого явления (повышения инерционности) возможно и в синтезаторах типа «Integer-N», если увеличить усиление в системе и, в частности, последовательно с фильтром включить усилитель, коэффициент усиления которого Kус будет компенсировать отрицательное действие N: τ0 = N/KФДKФKусKУГ ≈ 1/KФДKФKУГ [3].
Интересен «механизм» обеспечения дробности N в синтезаторе типа «Fractional-N». В ADF4153, в цепи управления делителем, применен сигма-дельта интерполятор, выходной сигнал которого представляет собой временнyю последовательность нулей («0») и единиц («1»), подобную выходной последовательности сигма-дельта модулятора [9]. Дробное число N получают как среднее значение двух коммутируемых (в соответствии с данными, программирующими интерполятор) целых чисел N0 и N1 = N0 + 1: значению N0 соответствует управляющий «0» в указанной выходной последовательности интерполятора, а значению N1 — управляющая «1».
В синтезаторах используются фильтры в основном по схеме, изображенной на рис. 2, д, и, соответственно, реализуется астатический режим работы. При этом в синтезаторах типа «Integer-N» отсутствует, как было показано выше, фазовое рассогласование на входе ФД, а в синтезаторах типа «Fractional-N» оно есть. Но это рассогласование «астатического характера». На ФД воздействует переменная двухполярная фазовая ошибка, среднее значение которой равно нулю (благодаря применению пропорционально-интегрирующего фильтра и отслеживанию фазы). При этом, благодаря фильтрующим свойствам системы ФАПЧ, пульсации частоты на выходе УГ (фазовый шум), обусловленные указанной фазовой ошибкой на входе ФД, снижены до допустимого уровня. Но надо полагать, что пульсации могут быть дополнительно уменьшены, если на выходе синтезатора включить фильтр по схеме рис. 1, а.
В таблице 1 приведены некоторые технические данные новых синтезаторов фирмы Analog Devices (максимальная синтезируемая частота — 7 ГГц), а в таблице 2 — данные частот и элементов фильтров, рекомендуемых для синтезаторов серии ADF4360 [7, 8]. Данные в таблице 2 даются для перестраиваемых гетеродинов с фильтрами по схеме рис. 2, д и для гетеродинов с фиксированными частотами, в которых используются фильтры по схеме на рис. 2, г. Частота в таблицах дается в величинах ƒ (в Гц и его производных).
Таблица 1. Параметры новых синтезаторов частот фирмы Analog Devices

* Частота fвх < 20 МГц (ADF4107) и < 10 МГц (ADF4360-x) — для прямоугольных колебаний на входе ИМС с уровнями КМОП.
** При включении внутреннего делителя частоты (на выходе ИМС) частота может быть уменьшена в два раза.
Таблица 2. Данные частот и элементов фильтра для гетеродинов с ADF4360

* Для внешних элементов индуктивности от 68 нГ до 1 нГ.
Другие применения системы ФАПЧ
Выше было рассмотрено применение системы ФАПЧ в качестве фильтра модулирующей функции ЧМ сигнала (рис. 1, а) и синтезатора частот (рис. 1, б). Ниже рассмотрены другие применения системы ФАПЧ (рис. 3).

Частотный (амплитудно-частотный) фильтр. На рис. 3, а приведена схема фильтра на базе системы ФАПЧ. Перед УГ включен сумматор, на один из входов которого подается входной сигнал Uвх, подлежащий фильтрации, а на другой — сигнал обратной связи E0 + Uвых(p) с приращением Uвых(p), обусловленным Uвх и являющимся выходным сигналом. Передаточная функция фильтра

Согласно (16), при подаче Uвх система ФАПЧ отрабатывает таким образом, что постоянная составляющая, если она имеется в составе Uвх, компенсируется постоянной составляющей Uвых(p), а переменная — с некоторым частотно-зависимым рассогласованием, обусловленным передаточной функцией. Полоса пропускания системы ФАПЧ должна соответствовать спектру Uвх (с учетом его расширения в «частотной» цепи УГ — ФД) и обеспечивать отслеживание изменений, обусловленных Uвх, а возникающее рассогласование (например, по фазе) должно быть в пределах возможностей ФД.
Фильтр рассматривается в качестве примера одного из возможных применений системы ФАПЧ. Обычно применяются относительно простые и обладающие более высокими параметрами широко известные фильтры на операционных усилителях [6].
Частотный модулятор. Частота на выходе УГ пропорциональна напряжению на его входе. Это дает возможность использовать систему ФАПЧ в качестве частотного модулятора. При этом собственно модулятором является УГ, а система обеспечивает отслеживание несущей, делая ее равной частоте опорного колебания. Схема модулятора показана на рис. 3, б, а его передаточная функция равна

Функция (17), характеризуемая отношением kФ(p)/pτ0 (вместо pτ0/kФ(p)), является функцией фильтра верхних частот (ФВЧ). В результате, для модулятора с фильтром Ф, согласно (4),

Функция (18) отличается от «стандартной» для полиномиального ФВЧ наличием члена pτ0 в полиноме числителя (подобно наличию члена pτФ в (8)). Однако последнее не является обязательным, и для модулятора с фильтром, согласно (7),

Система ФАПЧ в рассматриваемом модуляторе должна быть более низкочастотной, чем в фильтре по схеме рис. 3, а. Ее частота Ω0 = 1/√(τ0τФ), близкая к частоте среза ФВЧ, должна быть в области нижней границы спектра модулирующего сигнала, тогда как аналогичная частота для ФНЧ находится в области его верхней границы. Спектр модулирующего сигнала находится, соответственно, в полосе пропускания ФВЧ и не должен иметь составляющих в области нуля. При этом, имея ограничение снизу, спектр не ограничен сверху. Однако в последующих устройствах (на выходе модулятора) может быть осуществлена полосовая фильтрация частотно-модулированного сигнала.
Частотный демодулятор. На рис. 3, в приведена схема частотного демодулятора. ЧМ сигнал подается на управляющий вход системы ФАПЧ, а демодулируемый снимается с выхода Ф. Передаточная функция демодулятора

является функцией ФНЧ. Отметим следующую особенность. Если в частотном модуляторе (рис. 3, б) система ФАПЧ обеспечивает равенство несущей частоты стабильной частоте опорного колебания, то в данном случае, наоборот, демодулятор подстраивается при помощи системы ФАПЧ под несущую частоту демодулируемого сигнала. В обоих случаях «стабилизирующая» частота находится на управляющем входе системы ФАПЧ.
Из схем рис. 1 и 3 следует, что входными и выходными величинами в простейшей системе могут быть напряжение и изменение частоты. Соответственно, могут быть реализованы четыре устройства преобразования сигнала, которые можно рассматривать в качестве основных. Это преобразователи «напряжение-напряжение» (фильтр на рис. 3, а), «частота-частота» (фильтр на рис. 1, а), «напряжение-частота» (частотный модулятор на рис. 3, б) и «частота-напряжение» (частотный демодулятор на рис. 3, в). Во всех четырех устройствах (в первых двух — по назначению) осуществляется фильтрация сигнала в соответствии с передаточными функциями (1), (16), (17) и (19). После подстановки kФ(p) передаточные функции конкретизируются, определяя параметры фильтрации и другие данные системы ФАПЧ.
Возможности системы ФАПЧ не ограничиваются указанными основными устройствами. На их базе строятся устройства, которые можно рассматривать в качестве производных. Примером являются синтезаторы частот, рассмотренные выше и построенные на базе устройства «частота-частота». Кроме того, производные устройства могут быть комбинированными. Одним из них является повышающий преобразователь частоты с квадратурным модулятором, упрощенная схема которого приведена на рис. 3, г.
Указанное устройство имеет два отличия от рассмотренных выше. Во-первых, в цепи обратной связи системы ФАПЧ применен понижающий преобразователь частоты ПЧ. Преобразователь — балансного типа, с квадратурным выходом. Во-вторых, применен квадратурный модулятор КМ, используемый в данном случае в качестве частотного (вместо УГ в модуляторе по схеме рис. 3, б), где Uвх — это две квадратурные составляющие модулирующего сигнала [10]. Такое устройство используется в микросхемах AD6523 (в составе чипсета «Othello») и AD6534 («Othello One») фирмы Analog Devices, предназначенных для систем связи GSM (DCS, PCS), GPRS и др. [11, 12]. В указанных системах применяется GMSK — гауссовская двухпозиционная частотная манипуляция с минимальным сдвигом.
На один из входов ПЧ (рис. 3, г) с выхода устройства поступает модулированный ВЧ сигнал c частотой ω1 + Δωвых(p), где ω1 — его несущая, а на другой вход — колебание от внешнего гетеродина с частотой ω2. Несущая сигнала в КМ, она же на выходе ПЧ (несущая так называемой «виртуальной» промежуточной частоты [11]), определяется частотой опорного источника ω0 на управляющем входе ФД. В результате отслеживания системой ФАПЧ, ВЧ несущая ω1 (на выходе устройства) определяется частотами ω0 и ω2 и равна ω1 = ω0 + ω2.
Передаточная функция устройства

где KЧМ = ΔωЧМ/Uвх — коэффициент преобразования в КМ, а τ0 и kФ(p)— согласно (2) и (3). Существенной особенностью функции (20) является то, что она, в отличие от функции (17), является функцией ФНЧ. В результате, в системе обеспечиваются модуляция сигналом, спектр которого — от нуля герц, и подавление составляющих верхних частот (за пределами спектра модулирующего сигнала).
Литература
- Curtin M., O’Brien P. Phase-Locked Loops for High-Frequency Receivers and Transmitters. Analog Dialogue. 33–3, 33–5, 33–7. 1999 (www.analog.com).
- Barrett C. Fractional/Integer PLL Basics. Technical Brief SWRA029. 1999 (www.ti.com).
- Голуб В. Система ФАПЧ и ее применения // Chip News. 2000. № 4.
- Стариков О. Метод ФАПЧ и принципы синтезирования высокочастотных сигналов (и др.) // Chip News. 2001. № 6–8, 10.
- Никитин Ю., Дмитриев С. Частотный метод анализа характеристик синтезаторов частот с импульсно-фазовой автоподстройкой частоты Analog Devices. Ч. 1–4 // Компоненты и технологии. 2003. № 3–6.
- Мошиц Г., Хорн П. Проектирование активных фильтров. М.: Мир. 1984.
- Голуб В. Новые синтезаторы частот фирмы Analog Devices // Chip News Украина. 2003. № 7.
- Analog Devices’ Data Sheets: ADF4107, Rev. 0, 2003; ADF4153, Rev. 0, 2003; ADF4360-1, Rev. 0, 2003; ADF4360-2, … ADF4360-7, Rev. PrA, 2003 (www.analog.com).
- Голуб В. С. Сигма-дельта-модуляторы и АЦП // Технология и конструирование в электронной аппаратуре. 2003. № 4 (http://tkea.wallst.ru; www.vdmais.kiev.ua).
- Голуб В. Квадратурные модуляторы и демодуляторы в системах радиосвязи // Электроника: НТБ. 2003. № 3 (www.electronics.ru).
- Fague D. Othello™: A New Direct-Conversion Radio Chip Set Eliminates IF Stages. Analog Dialogue. 33–10. 1999 (www.analog.com).
- Каталог VD MAIS 2003–2004: Микросхемы Analog Devices. Киев: VD MAIS, 2003 (www.vdmais.kiev.ua).