3.6. Механические характеристики синхронного двигателя

Синхронные двигатели, если они работают при постоянной частоте с неизменной угловой скоростью, применяются для приводов, не требующих регулирования скорости. К таким приводам относятся: компрессоры, холодильные машины, камнедробилки и т. п. Основное достоинство синхронного двигателя заключается в возможности работать с высоким коэффициентом мощности.

Угловая скорость синхронного двигателя (рис. 3.26, б) при работе в установившемся режиме с возрастанием нагрузки на валу до определенного значения, не превышающего максимального момента , остается строго постоянной и равна синхронной угловой скорости.

.
П оэтому механическая характеристика его имеет вид прямой линии, параллельной оси абсцисс. Если момент нагрузки превышает
оэтому механическая характеристика его имеет вид прямой линии, параллельной оси абсцисс. Если момент нагрузки превышает , то двигатель может выпасть из синхронизма.
, то двигатель может выпасть из синхронизма.
С овременные синхронные двигатели имеют в роторе кроме нормальной рабочей обмотки, питаемой постоянным током, еще и специальную пусковую короткозамкнутую обмотку. С помощью этой обмотки двигатель пускается в ход как асинхронный, и поэтому в пусковых режимах он обладает характеристикой асинхронного двигателя. На рис. 3.22 представлены две пусковые характеристики синхронного двигателя, одна из них1 соответствует пуску с пониженным начальным пусковым моментом
овременные синхронные двигатели имеют в роторе кроме нормальной рабочей обмотки, питаемой постоянным током, еще и специальную пусковую короткозамкнутую обмотку. С помощью этой обмотки двигатель пускается в ход как асинхронный, и поэтому в пусковых режимах он обладает характеристикой асинхронного двигателя. На рис. 3.22 представлены две пусковые характеристики синхронного двигателя, одна из них1 соответствует пуску с пониженным начальным пусковым моментом  и значительным«входным» моментом
и значительным«входным» моментом , под которым понимается момент, развиваемый при скорости, равной 0,95
, под которым понимается момент, развиваемый при скорости, равной 0,95  . При этой скорости возможно вхождение двигателя в синхронизм после включения постоянного тока в обмотку возбуждения.
. При этой скорости возможно вхождение двигателя в синхронизм после включения постоянного тока в обмотку возбуждения.
Если пусковая клетка имеет увеличенное активное сопротивление, то начальный пусковой момент  будет больше, чем в предыдущем случае, а входной момент
будет больше, чем в предыдущем случае, а входной момент  уменьшится (кривая2 на рис. 3.22). Выбор одной из двух указанных пусковых характеристик зависит от моментов сопротивления, которым обладают производственные механизмы.
уменьшится (кривая2 на рис. 3.22). Выбор одной из двух указанных пусковых характеристик зависит от моментов сопротивления, которым обладают производственные механизмы.
Для решения вопроса устойчивой работы двигателя при пульсирующей нагрузке необходимо знать зависимость момента  от угла
от угла между напряжением и ЭДС двигателя (рис. 3.23.). Эта зависимость
между напряжением и ЭДС двигателя (рис. 3.23.). Эта зависимость
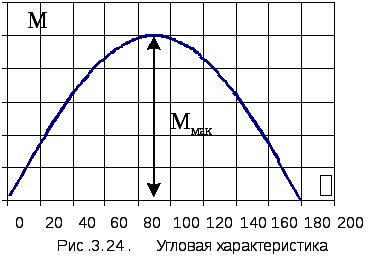 носит название угловой характеристики синхронного двигателя.
носит название угловой характеристики синхронного двигателя.
Уравнение угловой характеристики имеет вид

,

где — максимальный момент

,
 — ток короткого замыкания
— ток короткого замыкания 
С увеличением нагрузки угол  возрастает, что вызывает увеличение момента двигателя и обеспечивает равенство
возрастает, что вызывает увеличение момента двигателя и обеспечивает равенство , т.е. условие нового устойчивого состояние электропривода. При
, т.е. условие нового устойчивого состояние электропривода. При условие устойчивой работы нарушается, так как при увеличении нагрузки угол
условие устойчивой работы нарушается, так как при увеличении нагрузки угол продолжает возрастать, а момент, развиваемый двигателем, уменьшается, вследствие чего двигатель выпадает из синхронизма.
продолжает возрастать, а момент, развиваемый двигателем, уменьшается, вследствие чего двигатель выпадает из синхронизма.
Номинальному моменту двигателя  практически соответствует угол
практически соответствует угол . При этом перегрузочная способность двигателя равна
. При этом перегрузочная способность двигателя равна .
.
Вопросы для самопроверки
4.1. Из приведенных уравнений выберите уравнение для расчета механической характеристики асинхронного двигателя, учитывающего активное сопротивление статора.
О т в е т

1)

2)

3)

4)
Правильный ответ ____
4.2. Из приведенных уравнений выберите уравнение для расчета критического скольжения асинхронного двигателя в двигательном режиме.
О т в е т

1)
2)

3)

4)
Правильный ответ ____
4.3. Из приведенных уравнений выберите уравнение для расчета критического момента асинхронного двигателя в двигательном режиме.
т в е т
1)
2)

3)

4)
Правильный ответ ____
4.4. Из приведенных уравнений выберите уравнение для расчета критического момента асинхронного двигателя в генераторном режиме.
О т в е т

1)

2)

3)

4)
Правильный ответ ____
4.5. Из приведенных уравнений выберите уравнение для расчета критического скольжения асинхронного двигателя в двигательном режиме при введении в роторную цепь дополнительного сопротивления
О т в е т

1)

2)

3)

4)
Правильный ответ ____
4.6. Из приведенных механических характеристик асинхронного двигателя выбрать естественную характеристику

Правильный ответ ____
4.7. Из приведенных механических характеристик асинхронного двигателя выбрать реостатную характеристику.

Правильный ответ ____
4.8. Из приведенных механических характеристик асинхронного двигателя выбрать характеристику, снятую при пониженном напряжения питания

Правильный ответ ____

4.9. Из приведенных механических характеристик асинхронного двигателя выбрать характеристику, снятую при пониженной частоте напряжения питания при .

Правильный ответ ____
4.10. Из приведенных механических характеристик асинхронного двигателя выбрать реостатную характеристику при введении добавочного сопротивления в цепь статора

Правильный ответ ____
4.11. Из приведенных механических характеристик асинхронного двигателя выбрать характеристику в режиме динамического торможения.

Правильный ответ ____
4.12. Из приведенных механических характеристик асинхронного двигателя выбрать характеристику в режиме динамического торможения с большим током намагничивания в цепи статора.

Правильный ответ ____
4.13. Из приведенных механических характеристик асинхронного двигателя выбрать характеристику, снятую при пониженном напряжения питания.

Правильный ответ ____
4.14. Из приведенных уравнений выберите уравнение для синхронной скорости и максимального момента синхронного двигателя.
О т в е т
1)  ,
, 
2)  ,
, 
1)  ,
, 
1)  ,
, 
Правильный ответ ____
4.15. Из приведенных уравнений выберите уравнение для расчета угловой характеристики неявнополюсного синхронного двигателя.
О т в е т

1)

2)

3)

4)
Правильный ответ ____
4.16. Из приведенных механических характеристик электрических двигателей выбрать характеристику синхронного двигателя

Правильный ответ ____
4.17. Из приведенных механических характеристик выбрать пусковую характеристику синхронного двигателя.

Правильный ответ ____
Механические характеристики электродвигателя.
Зависимость угловой скорости электродвигателя от момента на его валу ш =У(А/) называют механической характеристикой электродвигателя. Различают механические характеристики электродвигателей естественные и искусственные. Естественная характеристика у любого типа электродвигателя одна и соответствует номинальным условиям электропитания при отсутствии внешних сопротивлений в электрических цепях двигателя. Искусственных механических характеристик может быть множество за счет изменения условий электропитания и включения внешних сопротивлений в цепи электродвигателя. На рисунке 1.3, в представлен вид естественных механических характеристик электродвигателей общего назначения: / — синхронного, 2—постоянного тока независимого возбуждения, 3 — асинхронного и -/—постоянного тока последовательного возбуждения.
Показатели. Основные показатели, по которым оценивают механические характеристики, — это их жесткость Р и крутизна у (рис. 1.3, в):

В зависимости от значения жесткости механические характеристики электродвигателей могут быть: абсолютно жесткие, (Р = ©о), что свойственно синхронному двигателю (/, рис. 1.3, в), жесткие, (Р->оо), что свойственно естественной механической характеристике двигателя постоянного тока независимого возбуждения (2, рис. 1.3, в), мягкие (р -»0), что свойственно двигателю постоянного тока последовательного возбуждения (-/, рис. 1.3, в), и абсолютно мягкие (р = 0), что характерно для асинхронного двигателя при критическом скольжении (J, рис. 1.3, в) и в замкнутых системах ЭП на участках ограничения вращающего момента двигателя.

В установившемся режиме вращения при выполнении условия, которое называют критерием статической устойчивости ЭП, работа ЭП устойчивая, если:
где Рс, рд — значения жесткости механических характеристик статической нагрузки соответственно производственного механизма и двигателя в точке их пересечения.
В противном случае установившийся режим работы ЭП нарушается из-за малейшего внешнего возмущения со стороны нагрузки или двигателя.
Например, если на рисунке 1.3, в принять механическую характеристику 4 как механическую характеристику производственного механизма, приводимого в действие асинхронным двигателем с механической характеристикой 3, то на основании критерия статической устойчивости (1.13) определяем, что в точке В работа ЭП неустойчивая (рс5 а в точке С — устойчивая (Рсс ^ Рдс)-
Электрооборудование насосных, компрессорных станций и нефтебаз — Механические характеристики и свойства синхронных электродвигателей
Синхронным называют такой электродвигатель переменного тока, у которого угловая скорость (частота вращения) ротора одинакова с угловой скоростью (частотой вращения) вращающегося поля, т. е. ω=ω0 (п=n0).
При работе синхронного электродвигателя питание статорной обмотки производится переменным током, а роторной — постоянным. Роторная обмотка называется обмоткой возбуждения, а питающий ее постоянный ток — током возбуждения. Взаимодействие магнитных полей ротора и статора создает электромагнитный вращающий момент. Однако, поскольку переменный ток меняет свое направление с частотой 50 периодов в секунду (50 Гц), при включении двигателя ротор не может сразу начать вращение и вибрирует, так как испытывает непрерывные толчки в обе стороны. Для того чтобы можно было запустить синхронный двигатель в ход, его ротор, кроме обмотки возбуждения, снабжают дополнительной пусковой обмоткой (короткозамкнутой или фазной) —с такой обмоткой двигатель включается как обычный асинхронный электродвигатель от полного или пониженного напряжения сети. При достижении двигателем угловой скорости, близкой к синхронной (0,95—0,98ω0), в обмотку возбуждения подается постоянный ток (ток возбуждения), после чего угловая скорость вращения ротора становится одинаковой с угловой скоростью вращающегося поля, двигатель входит в синхронизм и начинает работать в синхронном режиме. При синхронной частоте вращения ротора наличие дополнительной пусковой обмотки не оказывает никакого действия, так как эта обмотка, вращаясь синхронно с магнитным полем, не пересекается магнитными линиями, токи в ней не индуктируются и вращающий момент не создается.
Питание обмотки возбуждения осуществляется от возбудителя — генератора постоянного тока, смонтированного на самом двигателе, или отдельно стоящего возбудительного агрегата — генератора постоянного тока с приводом от асинхронного электродвигателя трехфазного тока. Кроме вращающихся возбудительных агрегатов заводы выпускают статические возбудители из полупроводниковых (тиристорных) выпрямителей. Возбудительные агрегаты для взрывозащищенных машин нефтяных насосных и газокомпрессорных станций должны быть также во взрывозащищенном исполнении или расположены в отдельном невзрывоопасном помещении.
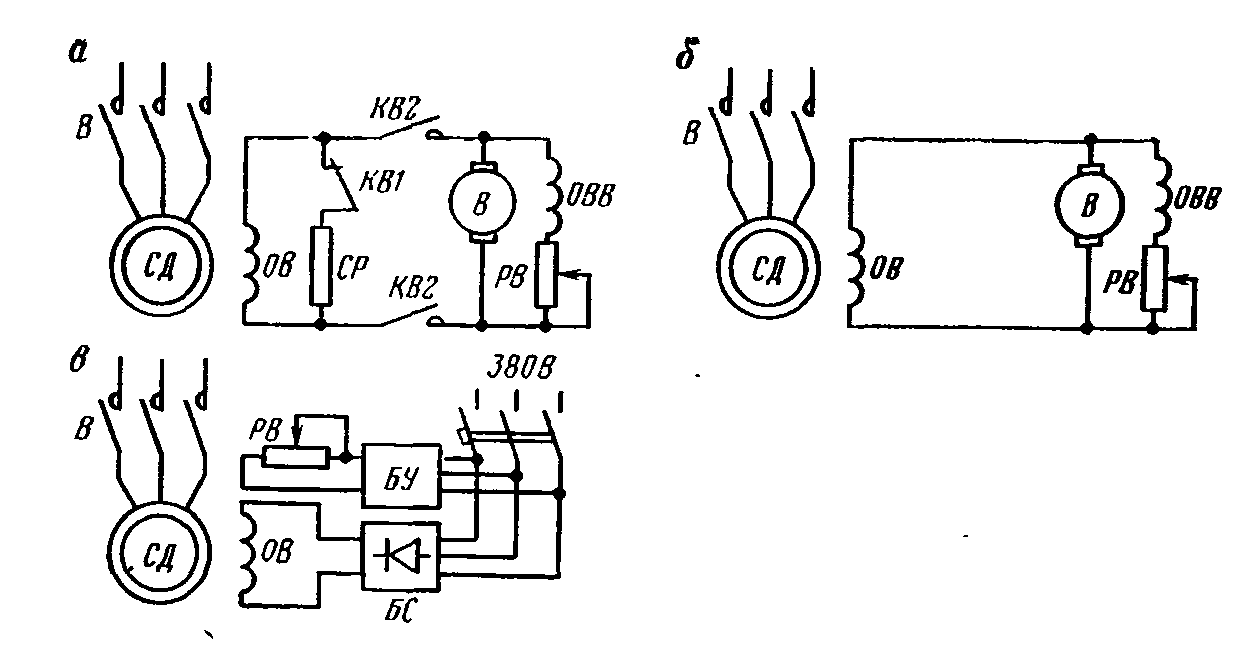
Рис. 6. Схемы пуска и возбуждения синхронных электродвигателей
На рис. 6,а изображена схема питания обмотки возбуждения ОВ синхронного двигателя СД от вращающегося возбудителя В (генератора постоянного тока) с обмоткой возбуждения ОВВ и реостатом возбуждения РВ. При пуске синхронного двигателя вследствие большой частоты вращения электромагнитного поля относительно неподвижного ротора на концах обмотки возбуждения (на кольцах ротора) возникают большие напряжения, опасные для изоляции ротора. Для предотвращения этого обмотку возбуждения перед пуском замыкают на разрядное сопротивление СР, которое отключается контактором КВ1 одновременно с включением постоянного тока двухполюсным контактором КВ2. Для механизмов, не требующих при пуске больших моментов (например, центробежных насосов и вентиляторов), применяют схему без разрядного сопротивления, с глухим подключением возбудителя к обмотке возбуждения (рис. 6,б), а в качестве разрядного используют сопротивление обмотки возбуждения возбудителя ОВВ. На рис. 6,в изображена схема возбуждения от комплектного статического возбудителя с блоком управления БУ. Регулирование тока возбуждения осуществляется реостатом возбуждения РВ. Обмотка возбуждения ОВ получает питание постоянным током от селенового выпрямителя БС.
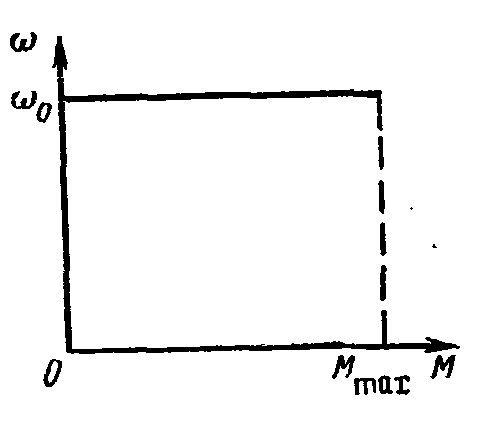
Рис. 7. Механическая характеристика синхронного электродвигателя
Механическая характеристика синхронного электродвигателя обусловлена его основным свойством — постоянной угловой скоростью (частотой вращения) и представляется в виде прямой линии, параллельной оси моментов. Как видно из рис. 7, механическая характеристика обрывается при М=Мmаx. Это означает, что при колебаниях нагрузки, не превышающих Mmax, значение мгновенной угловой скорости колеблется около средней величины, весьма близкой к ω0. При значительном увеличении момента нагрузки (больше Mmax) двигатель выпадает из синхронизма и останавливается или переходит в асинхронный режим. Во избежание выпадения из синхронизма при случайных толчках нагрузки синхронные двигатели делают такими, что их максимальный момент в 2—2,5 раза больше номинального Mmax=(2:2,5)Мnom.
Пуск синхронного двигателя характеризуется тремя моментами: пусковым Мпуск, необходимым для трогания двигателя с места под нагрузкой; входным Мвх, при входе в синхронизм, т. е. при угловой скорости, близкой к синхронной (0,95-:-0,98ω0), и максимальным Ммах (критическим), при синхронной скорости и номинальных напряжении и токе возбуждения ротора. Минимальные моменты, необходимые для пуска механизмов насосных и компрессорных станций, приведены в табл. 5.
Пуск синхронных электродвигателей может быть осуществлен как от полного, так и от пониженного напряжения, в зависимости от мощности питающей сети. Способы ограничения пускового тока, если прямой пуск недопустим, те же, что и для асинхронных двигателей (включение активных и реактивных сопротивлений и автотрансформаторов в цепь статора).
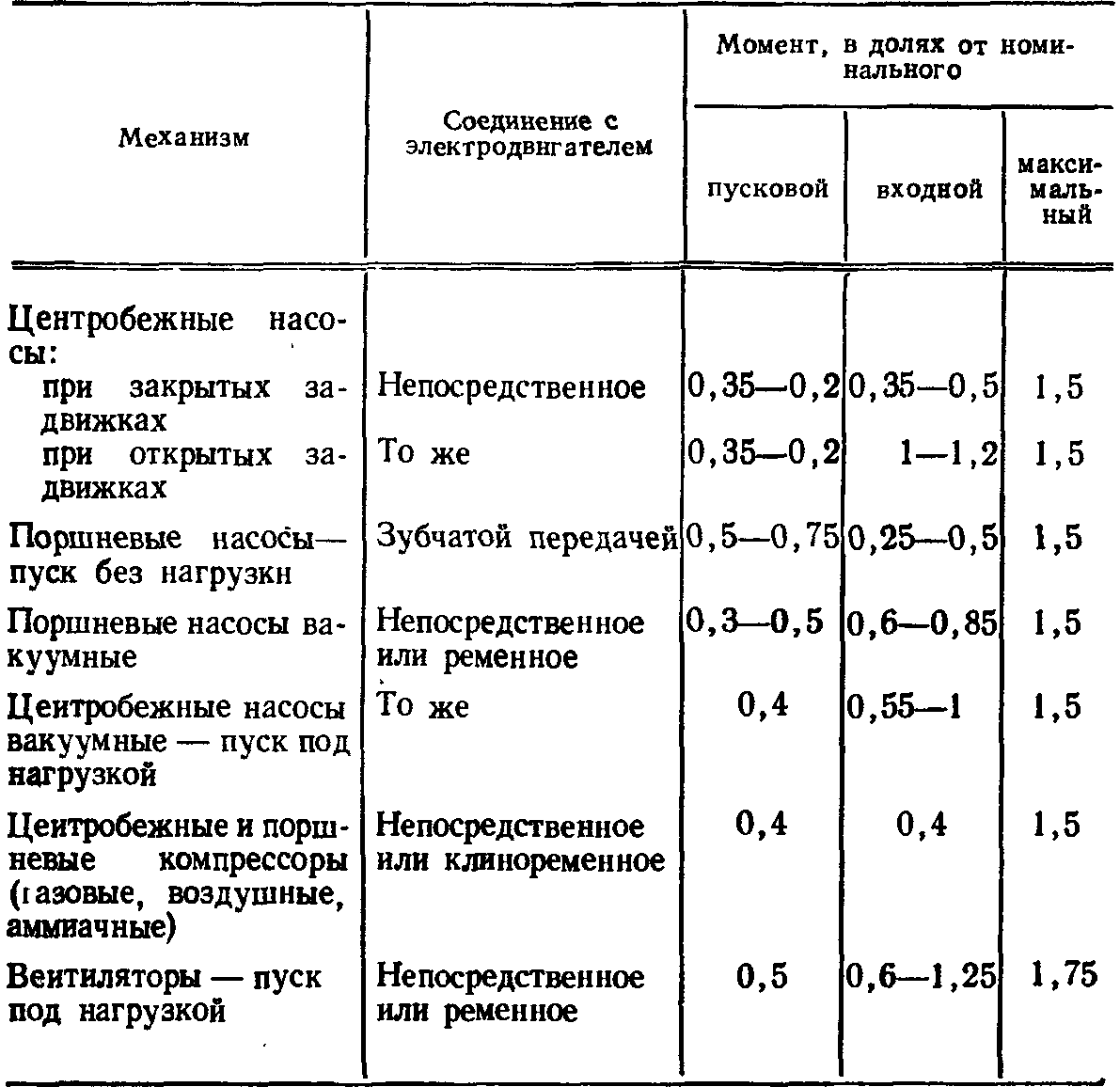
Минимальные моменты синхронных двигателей, необходимые для пуска механизмов
Статор синхронного электродвигателя, будучи присоединен к сети переменного тока, получает от нее необходимую для намагничивания реактивную мощность. Ротор намагничивается подаваемым в него током возбуждения (постоянным током). При малом токе возбуждения электродвигатель потребляет из сети реактивную мощность, при большом — отдает ее в сеть. В первом случае говорят, что двигатель работает с отстающим коэффициентом мощности, во втором — с опережающим коэффициентом мощности.
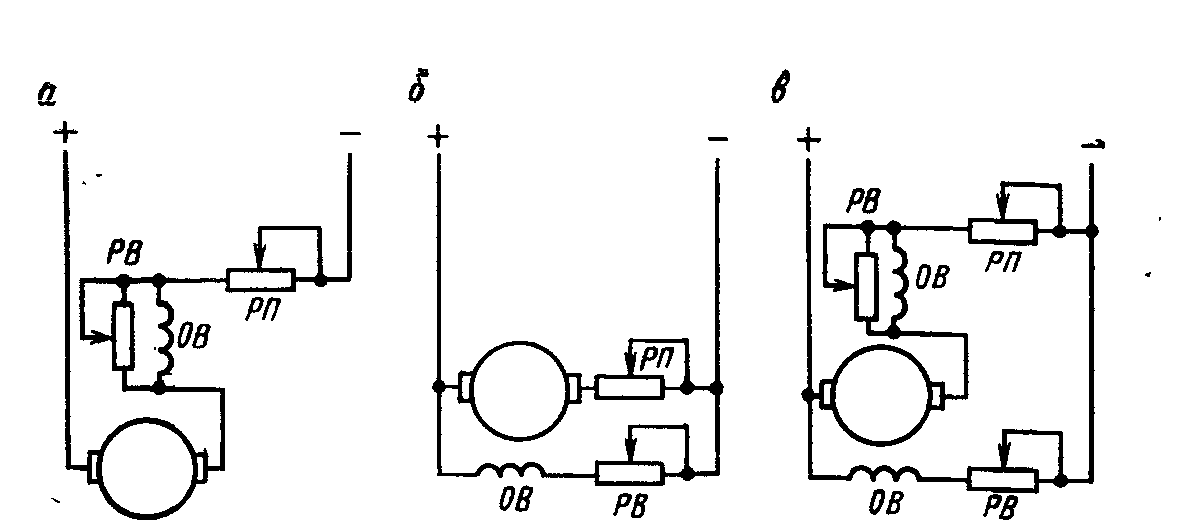
Рис. 8. Схемы электродвигателей постоянного тока с последовательным (а), параллельным (б) и смешанным (а) возбуждением
Свойство синхронных электродвигателей отдавать в сеть реактивную мощность используют для компенсации недостающей в сети реактивной мощности, т. е. для улучшения коэффициента мощности сети.
Какая механическая характеристика свойственна синхронному двигателю

Механическая и угловая характеристики синхронных электродвигателей
Синхронные двигатели начинают широко внедрять в строительное производство, применяя их для привода машин средней и большой мощности, не требующих регулирования скорости: компрессоров, насосов, камнедробилок, экскаваторов.
Синхронный двигатель имеет неизменную скорость вращения, поэтому его механическая характеристика представляет прямую линию, параллельную оси абсцисс. В квадранте координатной системы она характеризует двигательный, а в квадранте — генераторный режим (рис. 35,а).
Рекламные предложения на основе ваших интересов:
Дополнительные материалы по теме:
- Оказание первой помощи пострадавшим от поражения электрическим током
- Требования техники безопасности, выполнение которых обязательно при эксплуатации электроустановок
- Общие меры безопасности при эксплуатации электрических установок
- Классификация помещений по степени опасности поражения электрическим током
- Действие электрического тока на организм человека
- Техника безопасности при эксплуатации электрооборудования
- Особенности электроснабжения установок с электрифицированным инструментом
- Преобразователи частоты и понижающие трансформаторы
- Электропривод компрессоров
Рис. 35. Механическая и угловая характеристики синхронного двигателя
а — механическая характеристика; б — угловая характеристика
Синхронный двигатель обладает абсолютно жесткой механической характеристикой. Однако его момент не может иметь беспредельно большого значения. При некотором предельном или максимальном значении нагрузочного момента синхронный двигатель выходит из устойчивой синхронной работы и останавливается.
При увеличении нагрузки синхронного двигателя ротор его начинает отставать от поля статора, угол внутреннего сдвига фаз © при этом возрастает. Увеличению угла © соответствует рост момента синхронного двигателя. Однако при возрастании до значений, больших момент начинает уменьшаться и становится возможным выпадение из синхронизма и остановка двигателя.
Синхронный двигатель может работать и генератором с отдачей энергии в сеть при синхронной скорости, когда нагрузочный момент на его валу будет иметь отрицательное значение. Такой режим используется в сетевых двигателях преобразовательной группы системы Г—Д. Для целей торможения такой режим практического значения не имеет, поскольку при этом нельзя получить снижения скорости.
Торможение синхронных двигателей противовключе-нием практически не применяется из-за больших толчков тока и усложненной аппаратуры управления. Вместо этого обычно применяют динамическое торможение.
При динамическом торможении синхронного двигателя к кольцам ротора подводится постоянный ток, а обмотка статора замыкается на сопротивление. Механические характеристики синхронного двигателя в этом режиме будут подобны характеристикам асинхронного двигателя при динамическом торможении.
Современные синхронные двигатели имеют в роторе кроме нормальной рабочей обмотки, питаемой постоянным током, еще и специальную пусковую короткозам-кнутую обмотку. С помощью этой обмотки двигатель пускается в ход как асинхронный, поэтому в пусковых режимах он обладает асинхронной характеристикой.
Хотя синхронный двигатель является несколько более сложной машиной, чем асинхронный двигатель с ко-роткозамкнутым ротором (из-за наличия у первого возбудителя, колец и щеточного устройства), тем не менее он применяется очень широко, заменяя асинхронный электродвигатель. Объясняется- это главным образом тем, что синхронный двигатель может работать с опережающим cos ф, отдавая в сеть реактивную мощность, необходимую для возбуждения асинхронных машин и трансформаторов. Тем самым повышается cos ф всего предприятия в целом и уменьшается мощность компенсирующих устройств. При значительной мощности синхронных двигателей в данной электроустановке от компенсирующих устройств можно полностью отказаться. Коэффициент полезного действия синхронных двигателей и надежность их выше, чем асинхронных, вследствие увеличенного зазора между статором и ротором и меньшей чувствительности к изменениям напряжения сети. Последнее обстоятельство вызывается тем, что момент асинхронного двигателя пропорционален квадрату напряжения сети, а момент синхронного — первой степени напряжения.
Для уменьшения величины пусковых токов и связанного с ними снижения напряжения, особенно в сетях небольшой мощности, пуск синхронных двигателей осуществляется обычно через реактор, а в некоторых случаях— через автотрансформатор. Ограничение пусковых токов защищает обмотки двигателей от повышенных динамических нагрузок, возникающих при прямом включении в сеть.