Построение механической характеристики асинхронного двигателя

Для оценки свойств асинхронного двигателя прибегают к построению механической характеристики.
Механическая характеристика асинхронного двигателя выражает зависимость между электромагнитным моментом и частотой вращения, либо скольжением. Скольжение – это величина, которая показывает, насколько частота вращения магнитного поля опережает частоту вращения ротора.
Благодаря механической характеристике, появляется возможность определить к какому типу установки больше подходит двигатель, на каком участке сохраняется его устойчивая работа, перегрузочную способность и другое.
Построим механическую характеристику для двигателя 4A90L4У3.
Для построения нам необходимо произвести расчет номинального момента и скольжения.
Рассчитаем критическое скольжение и момент, для этого необходимо знать коэффициент λ.
Итак, мы определили основные точки характеристики, но для её построения их недостаточно. Поэтому с помощью упрощенной формулы Клосса, рассчитаем моменты для других значений скольжений.
Упрощенная формула Клосса выглядит следующим образом
Для удобства составим таблицу.
Механическая характеристика асинхронного двигателя при различных режимах, напряжениях и частотах

Механические характеристики асинхронных двигателей могут быть выражены в виде n=f(M) или n = f ( I ). Однако часто механические характеристики асинхронных двигателей выражаются в виде зависимости M = f ( S), где S — скольжение, S = (nc-n)/nc , где n с — синхронная скорость.
На практике для графического построения механической характеристики пользуются упрощенной формулой, называемой формулой Клосса:

здесь: Мк — критическое (максимальное) значение момента. Этому значению момента отвечает критическое скольжение

Формула Клосса применяется при решении вопросов, связанных с электроприводом, осуществляемым с помощью асинхронного двигателя. Пользуясь формулой Клосса можно построить график механической характеристики по паспортным данным асинхронного двигателя. Для практических расчетов в формуле при определении критического момента перед корнем следует принимать во внимание только знак плюс.
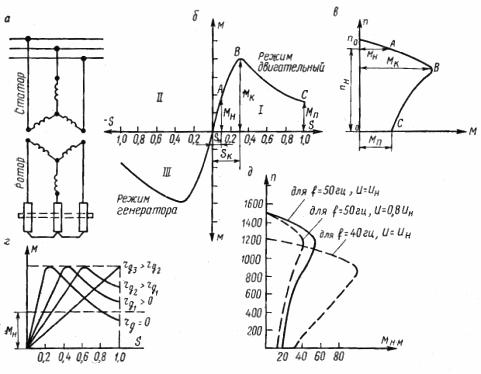
Рис. 1. Асинхронный двигатель: а — принципиальная схема, б — механическая характеристика М=f(S) — естественная в двигательном и генераторном режимах, в — естественная механическая характеристика n=f(М) в двигательном режиме, г — искусственные реостатные механические характеристики, д — механические характеристики для различных напряжений и частот.

Асинхронный двигатель с короткозамкнутым ротором
Как видно из рис. 1, механическая характеристика асинхронного двигателя располагается в I и III квадрантах. Часть кривой в I квадранте соответствует положительному значению скольжения и характеризует двигательный режим работы асинхронного двигателя, а в III квадранте — генераторный режим. Наибольший практический интерес представляет двигательный режим.
График механической характеристики двигательного режима содержит три характерные точки: А, В, С и условно может быть подразделен на два участка: ОВ и ВС (рис. 1, в).
Точка А соответствует номинальному моменту двигателя и определяется по формуле Мн = 9,55 •10 3 • (P н/ n н)
Этому моменту соответствует номинальное скольжение, которое для двигателей общепромышленного применения имеет величину в пределах от 1 до 7%, т. е. Sн=1 — 7%. При этом мелкие двигатели имеют большее скольжение, а крупные — меньшее.
Двигатели с повышенным скольжением , предназначенные для работы с ударной нагрузкой, имеют S н ~ 15%. К ним относятся, например, двигатели единой серии АС.
Точка С на характеристике соответствует величине начального вращающего момента , возникающего на валу двигателя при пуске. Этот момент Мп носит название начального, или пускового. Скольжение при этом равно единице, а скорость — нулю. Величину пускового момента легко определить по данным справочной таблицы, где указывается отношение пускового момента к номинальному Мп/Мн.
Величина пускового момента при постоянных величинах напряжения и частоты тока зависит от активного сопротивления в цепи ротора. При этом вначале с возрастанием активного сопротивления увеличивается величина пускового момента, достигая своего максимума при равенстве активного сопротивления цепи ротора и полного индуктивного сопротивления двигателя. В дальнейшем с возрастанием активного сопротивления ротора величина пускового момента уменьшается, стремясь в пределе к нулю.
Точка В (рис. 1,б и в) соответствует максимальному моменту , который может развивать двигатель на всем диапазоне скоростей от n = 0 до n = n с. Этот момент носит название критического (или опрокидывающего) момента Мк. Критическому моменту соответствует и критическое скольжение Sк. Чем меньше величина критического скольжения Sк, а также величина номинального скольжения S н, тем больше жесткость механической характеристики.
Как пусковой, так и критический моменты определяются через номинальный. Согласно ГОСТ на электрические машины для короткозамкнутого двигателя должно соблюдаться условие Мп/Мн = 0,9 — 1,2, Мк/Мн = 1,65 — 2,5.
Следует иметь в виду, что величина критического момента не зависит от активного сопротивления роторной цепи, в то время как критическое скольжение S к прямо пропорционально этому сопротивлению. Это означает, что с увеличением активного сопротивления роторной цепи величина критического момента остается неизменной, однако максимум кривой момента смещается в сторону возрастающих значений скольжения (рис. 1, г).
Величина критического момента прямо пропорциональна квадрату напряжения, подводимого к статору, и обратно пропорциональна квадрату частоты напряжений и частоты тока в статоре.
Если, например, напряжение, подводимое к двигателю, будет равно 85% номинального значения, то величина критического момента при этом составит 0,85 2 = 0,7225 = 72,25% критического момента при номинальном напряжении.
Обратное явление наблюдается при изменении частоты. Если, например, к двигателю, предназначенному для работы с частотой тока f = 60 гц, подвести ток частотой f = 50 гц, то критический момент получит в (60/50) 2 = 1,44 раза большее значение, чем при своей формальной частоте (рис. 1, д).
Критический момент характеризует собой мгновенную перегрузочную способность двигателя, т. е. он показывает, какую мгновенную (на несколько секунд) перегрузку способен перенести двигатель без каких-либо вредных последствий.

Участок механической характеристики от нулевого до максимального (критического) значения (см. рис. 1 , б и в) носит название устойчивой части характеристики , а участок ВС (рис. 1,в) — неустойчивой части .
Объясняется такое деление тем, что на возрастающей части характеристики ОВ с увеличением скольжения, т.е. с уменьшением скорости, растет развиваемый двигателем момент. Это означает, что при увеличении нагрузки, т. е. при возрастании тормозного момента, уменьшается скорость вращения двигателя, а развиваемый им момент увеличивается. При снижении нагрузки, наоборот, скорость возрастает, а момент уменьшается. При изменении нагрузки на всем диапазоне устойчивой части характеристики происходит изменение скорости вращения и момента двигателя.
Двигатель не в состоянии развить момент больше критического, и если тормозной момент окажется больше, двигатель неминуемо должен остановиться. Происходит, как принято говорить, опрокидывание двигателя .
Механическая характеристика при постоянных U и I и отсутствии добавочного сопротивления в цепи ротора называется естественной характеристикой (характеристика короткозамкнутого асинхронного двигателя с фазным ротором без добавочного сопротивления в цепи ротора). Искусственными, или реостатными, характеристиками называются такие, которые соответствуют добавочному сопротивлению в цепи ротора.
Все значения пусковых моментов различны между собой и зависят от активного сопротивления цепи ротора. Одному и тому же номинальному моменту Мн соответствуют скольжения различной величины. С увеличением сопротивления цепи ротора возрастает скольжение и, следовательно, уменьшается скорость вращения двигателя.
Благодаря включению в цепь ротора активного сопротивления механическая характеристика в устойчивой части вытягивается в сторону возрастания скольжения, пропорционально сопротивлению. Это означает, что скорость двигателя начинает сильно меняться в зависимости от нагрузки на валу и характеристика из жесткой делается мягкой.
Телеграмм канал для тех, кто каждый день хочет узнавать новое и интересное: Школа для электрика
Если Вам понравилась эта статья, поделитесь ссылкой на неё в социальных сетях. Это сильно поможет развитию нашего сайта!
Не пропустите обновления, подпишитесь на наши соцсети:
Ранее на эту тему: Электропривод
Расчет механической характеристики асинхронного электродвигателя для работы в составе приводов буровых установок
Филин, В. А. Расчет механической характеристики асинхронного электродвигателя для работы в составе приводов буровых установок / В. А. Филин. — Текст : непосредственный // Молодой ученый. — 2020. — № 38 (328). — С. 15-19. — URL: https://moluch.ru/archive/328/73610/ (дата обращения: 16.03.2024).
В статье представлен расчет механической характеристики асинхронного электродвигателя в составе буровой установки. Целью работы является построение механической характеристики асинхронного электродвигателя с помощью программы. В ходе работы выполняется построение зависимостей частоты вращения от момента, зависимостей момента от скольжения на основе аналитического метода и математического моделирования.
Ключевые слова: асинхронный двигатель, механическая характеристика, электрический привод.
Ярко выраженной тенденцией производства электроприводов буровой установки является все более широкое применение асинхронных двигателей (АД). [6] Во многом это связанно с конструктивными особенностями АД, а именно простая конструкция, низкая стоимость из-за небольшого количества цветного металла, неприхотливые эксплуатационные условия. Основным соображением для проектировщика асинхронного двигателя является конструкция двигателя с высоким пусковым моментом, лучшим КПД и коэффициентом мощности.
Но требования к энергоэффективности из года в год ужесточаются, что заставляет производителей идти на вынужденную модернизацию имеющихся моделей либо проектировать абсолютно новые. Для правильной эксплуатации двигателя силового привода важно знать, как будут меняться его основные параметры, т. е. крутящий момент М, частота вращения n и мощность N, в зависимости от нагрузки и изменения напряжения и частоты тока в питающейся сети.
Расчет механической характеристики возможно произвести тремя способами: аналитический методом, на основе формул и зависимостей, построение математической модели, экспериментальное исследование.
Основные параметры АД при частоте сети 50 Гц
Наименование параметра
Значение параметра
Полезная мощности, кВт
Частота вращения (синхронная), об/мин
Частота вращения, об/мин
Отношение макс. момента к номинальному, о.е.
Моменты, создаваемые двигателем и исполнительным органом рабочей машины, могут иметь разные значения при различных частотах вращения. При выборе электродвигателя необходимо, чтобы его электромеханические свойства соответствовали технологическим требованиям приводимой им рабочей машины. К электромеханическим свойствам в первую очередь относится механическая характеристика. Механической характеристикой электродвигателя называют зависимость между частотой вращения вала двигателя и развиваемым им n = f(М) . Вместо частоты вращения вала n можно записать ω = f(М) , так как эти величины пропорциональны ω = πn/30 . [1] Под скольжением подразумевается величина в относительных единицах, которая характеризует отставание скорости вращения ротора от синхронной скорости вращения поля статора, создаваемого трехфазной обмоткой [2]
Скольжением асинхронной машины выражается отношением:

Электромагнитный момент М на валу асинхронной машины пропорционален величине магнитного потока и активной составляющей тока в обмотке ротора, которая зависит от величины скольжения.

где m — число фаз обмотки статора; U — фазное напряжение сети; R c -активное сопротивление фазы обмотки статора; R p — активное сопротивление фазы обмотки ротора, приведённое к статору; Х с — индуктивное сопротивление фазы обмотки статора; Х р — индуктивное сопротивление фазы обмотки ротора, приведённое к статору.
Критическое скольжение по параметрам обмоток двигателя определяется по формуле

Подставив (2) и (3) получим выражение для определения критического момента

Номинальный момент АД (Н∙м) вычисляется по формуле
где P ном — номинальная мощность двигателя, n ном — номинальная частота вращения.
Для расчета механической характеристики АД мощностью более 100 кВт пользуются упрощенной формулой Клосса.

Значение пускового момента АД можно определить постановкой s = 1 в формулу (2) или по данным каталога, используя формулу M п = K м M ном , где K м — кратность пускового момента по отношению к номинальному.
Уравнения (6) в достаточной мере описывает механические свойства АД. В асинхронных электродвигателях с короткозамкнутым ротором в той или иной мере наблюдается явление вытеснения тока в стержнях ротора, в связи с чем их параметры непостоянны и механические характеристики значительно отличаются от характеристик, рассчитанных по формулам Клосса. В частности, у некоторых электродвигателей с КЗ ротором при малых скоростях вращения наблюдается снижение момента, вызванное влиянием высших гармоник поля. [3]
Численные расчетные значения вращающегося момента
s , о.е
Как построить механические характеристики асинхронного двигателя
При построении моделей автоматизированного электропривода необходимо учитывать сложность электромеханических процессов, протекающих в двигателе при его работе. Результаты, полученные при математическом расчёте, следует проверять опытным путем. Таким образом, возникает потребность определения характеристик электродвигателей в ходе натурного эксперимента. Сведения, полученные в ходе такого эксперимента, дают возможность апробации построенной математической модели. В статье рассмотрен способ построения механических характеристик асинхронного двигателя с короткозамкнутым ротором, проводится экспериментальная проверка рассчитанной механической характеристики на примере системы, состоящей из асинхронного двигателя, к валу которого в качестве нагрузки подключен двигатель постоянного тока независимого возбуждения, оценивается погрешность расчёта, сделан вывод о возможности применения полученных результатов для дальнейших исследований. При проведении эксперимента используется лабораторный стенд НТЦ-13.00.000.

асинхронный двигатель
двигатель постоянного тока
механическая характеристика
схема замещения
насыщение магнитной системы.
1. Воронин С. Г. Электропривод летательных аппаратов: Учебно-методический комплекс. — Offline версия 1.0. — Челябинск,1995-2011.- ил. 493, список лит. — 26 назв.
2. Москаленко В. В. Электрический привод: учебник для студ. высш. учеб. заведений. — М.: Издательский центр «Академия», 2007. — 368 с.
3. Мощинский Ю. А., Беспалов В. Я., Кирякин А. А. Определение параметров схемы замещения асинхронной машины по каталожным данным // Электричество. — №4/98. — 1998. — С. 38-42.
4. Технический каталог, издание второе, исправленное и дополненное / Владимирский электромоторный завод. — 74 с.
5. Austin Hughes Electric Motors and Drives Fundamentals, Types and Applications. — Third edition / School of Electronic and Electrical Engineering, University of Leeds. — 2006. — 431 р.
Введение
Асинхронный двигатель (АД) — электрический двигатель, нашедший очень широкое применение в различных отраслях промышленности и сельского хозяйства. АД с короткозамкнутым ротором обладает особенностями, обуславливающими его широкое распространение: простота в изготовлении, а это означает низкую начальную стоимость и высокую надежность; высокая эффективность вместе с низкими затратами на обслуживание приводят в итоге к низким общим эксплуатационным расходам; возможность работы непосредственно от сети переменного тока.
Режимы работы асинхронного электродвигателя
Двигатели с короткозамкнутым ротором — асинхронные машины, скорость которых зависит от частоты питающего напряжения, числа пар полюсов и нагрузки на валу. Как правило, при поддержании постоянного напряжения питания и частоты, если игнорируется изменение температуры, момент на валу будет зависеть от скольжения.
Вращающий момент АД можно определить по формуле Клосса:
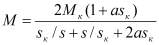
, (1)
где  ,
,  — критический момент,
— критический момент,  — критическое скольжение.
— критическое скольжение.
Кроме двигательного режима асинхронный двигатель имеет ещё три тормозных режима: а) генераторный тормозной с отдачей энергии в сеть; б) торможение противовключением; в) динамическое торможение.
При положительном скольжении машина с короткозамкнутым ротором будет действовать как двигатель, при отрицательном скольжении — как генератор. Из этого следует, что ток якоря двигателя с короткозамкнутым ротором будет зависеть только от скольжения. При выходе машины на синхронную скорость ток будет минимальным.
Генераторное торможение АД с отдачей энергии в сеть наступает при частоте вращения ротора, превышающей синхронную. В этом режиме электродвигатель отдаёт в сеть активную энергию, а из сети в электродвигатель поступает реактивная энергия, необходимая для создания электромагнитного поля.
Механическая характеристика для генераторного режима является продолжением характеристики двигательного режима во второй квадрант осей координат.
Торможение противовключением соответствует направлению вращения магнитного поля статора, противоположному вращению ротора. В этом режиме скольжение больше единицы, а частота вращения ротора по отношению к частоте вращения поля статора — отрицательна. Ток в роторе, а следовательно, и в статоре достигает большой величины. Для ограничения этого тока в цепь ротора вводят добавочное сопротивление.
Режим торможения противовключением наступает при изменении направления вращения магнитного поля статора, в то время как ротор электродвигателя и соединённые с ним механизмы продолжают вращение по инерции. Этот режим возможен также и в случае, когда поле статора не меняет направления вращения, а ротор под действием внешнего момента изменяет направление вращения.
В данной статье рассмотрим построение механической характеристики асинхронного двигателя в двигательном режиме.
Построение механической характеристики с помощью модели
Паспортные данные АД ДМТ f 011-6у1: Uф =220 — номинальное фазное напряжение, В; p=3 — число пар полюсов обмоток; n=880 — скорость вращения номинальная, об/мин; Pн=1400 — мощность номинальная, Вт; Iн=5,3 — ток ротора номинальный, А; η = 0.615 — к.п.д. номинальный, %; cosφ = 0.65 — cos(φ) номинальный; J=0.021 — момент инерции ротора, кг·м 2 ; Ki = 5.25 — кратность пускового тока; Kп = 2.36 — кратность пускового момента; Kм = 2.68 — кратность критического момента.
Для исследования эксплуатационных режимов асинхронных двигателей используются рабочие и механические характеристики, которые определяются экспериментально или рассчитываются на основе схемы замещения (СЗ). Для применения СЗ (рис.1) необходимо знать её параметры:
- R1, R2‘, RM — активные сопротивления фаз статора, ротора и ветви намагничивания;
- X1, X2‘, XM — индуктивные сопротивления рассеяния фаз статора ротора и ветви намагничивания.
Эти параметры требуются для определения пусковых токов при выборе магнитных пускателей и контакторов, при выполнении защит от перегрузок, для регулирования и настройки системы управления электроприводом, для моделирования переходных процессов. Кроме того, они необходимы для расчета пускового режима АД, определения характеристик асинхронного генератора, а также при проектировании асинхронных машин с целью сопоставления исходных и проектных параметров [3].
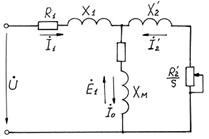
Рис. 1. Схема замещения асинхронного двигателя
Воспользуемся методикой расчёта параметров схемы замещения [3] для определения активных и реактивных сопротивлений фаз статора и ротора. Значения коэффициента полезного действия и коэффициента мощности при частичных нагрузках, необходимые для расчётов, приведены в техническом каталоге [4 стр.10]: pf = 0.5 — коэффициент частичной нагрузки, %; Ppf = Pн·pf — мощность при частичной нагрузке, Вт; η _pf = 0.56 — к.п.д. при частичной нагрузке, %; cosφ_pf = 0.4 — cos(φ) при частичной нагрузке.
Значения сопротивлений в схеме замещения: X1=4.58 — реактивное сопротивление статора, Ом; X2‘=6.33 — реактивное сопротивление ротора, Ом; R1=3.32 — активное сопротивление статора, Ом; R2‘=6.77 — активное сопротивление ротора, Ом.
Построим механическую характеристику асинхронного двигателя по формуле Клосса (1).
Скольжение определяют из выражения вида:

, (2)

где — скорость вращения ротора АД, рад/сек,
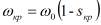
синхронная скорость вращения:

. (3)
Критическая скорость вращения ротора:
. (4)

. (5)
Точку критического момента определим из выражения

. (6)
Пусковой момент определим по формуле Клосса при s=1:
. (7)
По произведенным расчетам построим механическую характеристику АД (рис. 4). Для ее проверки на практике проведем эксперимент.
Построение экспериментальной механической характеристики
При проведении эксперимента используется лабораторный стенд НТЦ-13.00.000 «Электропривод». Имеется система, состоящая из АД, к валу которого в качестве нагрузки подключен двигатель постоянного тока (ДПТ) независимого возбуждения. Необходимо построить механическую характеристику асинхронного двигателя, используя паспортные данные асинхронной и синхронной машин и показания датчиков. Имеем возможность изменять напряжение обмотки возбуждения ДПТ, измерять токи на якоре синхронного и асинхронного двигателя, частоту вращения вала. Подключим АД к источнику питания и будем нагружать его, изменяя ток обмотки возбуждения ДПТ. Проведя эксперимент, составим таблицу значений из показаний датчиков:
Таблица 1 Показания датчиков при нагрузке асинхронного двигателя