Усилитель ошибки шим как работает

| Текущее время: Сб мар 16, 2024 01:09:06 |
Часовой пояс: UTC + 3 часа
Запрошенной темы не существует.
Часовой пояс: UTC + 3 часа

Powered by phpBB © 2000, 2002, 2005, 2007 phpBB Group
Русская поддержка phpBB
Extended by Karma MOD © 2007—2012 m157y
Extended by Topic Tags MOD © 2012 m157y
Работоспособность сайта проверена в браузерах:
IE8.0, Opera 9.0, Netscape Navigator 7.0, Mozilla Firefox 5.0
Адаптирован для работы при разрешениях экрана от 1280х1024 и выше.
При меньших разрешениях возможно появление горизонтальной прокрутки.
По всем вопросам обращайтесь к Коту: kot@radiokot.ru
©2005-2024
Про компенсацию фазы усилителя сигнала ошибки в ШИМ преобразователе и прочие снабберы
Собрал дуальный повышающий-инвертирующий ШИМ преобразователь на BD9851. Есть в схеме парочка непоняточек.
Выход с обратной связи усилителя сигнала ошибки соединяется с входом ОУ через RC цепочку. В даташите описывается ее назначение как «компенсация фазы». По идее все RC рассчитываются простой школьной формулой, на выходе которой мы имеем некую частоту. Не могли бы вы прояснить физический смысл компенсации фазы. По какой из классических схем тут включен и действует ОУ. К чему тут надо стремиться и как рассчитать этот участок, т.к. в даташите никаких типовых параметров.
Также вопрос: зачем в делителе напряжения, что мониторит выходное напряжение преобразователя, одно из плеч (то, что к выходному напряжению) зашунтировано RC? Назначение? И как здесь рассчитываются элементы?
ZZZAMK, на Ваши вопросы просто так не ответишь, потому что у Вас после этого появятся ещё более сложные вопросы.
Найдите какую нибудь литературу по импульсным источникам питания, там и найдёте хотя бы общие ответы на свои вопросы.
Например, не плохо всё описано в книге Марти Брауна «Источники питания, расчёт и конструирование».
В конце книги, в приложении есть глава «Компенсация контура обратной связи», там всё написано — и теория и примеры.
Вот! Видите! Спасибо! Пошел качать книжку искать!
Ни чего не вижу.
Книгу я скачивал, кажется с Натахауз-а. Если не найдёте — свистните.
спасибо, DWD, себе тоже скачал. хорошая книга.
Надо по смыслу тему дополнить данными.
Значит, так я думаю, что когда народ делает DC-DC преобразователи, то слизывает типовую схему из даташита и о грамотной копменсации фазы речи не идет, все на глазок. Если бы в моем даташите была такая схема — я бы голову не забивал, но пришлось.
Вы меня отослали к книжкам — я их почитал, там очень много умного написано, целые главы посвящены, но без пол-литры не разбересси.
Подход такой. В 2х словах есть в контроллере операционный усилитель, который глядит за выходным напряжением. И «. для устойчивой работы замкнутых обратными связями преобразователей, необходимо, чтобы коэффициент усиления разомкнутого контура стал меньше единицы до того, как фазовый угол достигнет значения -180 гр. Кроме того, в области среза должен быть сформирован наклон ЛАХ (логарифмическая амплитудная характеристика) разомкнутой системы -20дБ/Дек, а в области низких частот коэффициент усиления должен быть достаточно большим для того, чтобы снизить погрешность при измерениях входного напряжения и тока нагрузки. «
Оно все вроде бы логично и понятно, но когда надо посчитать реальные цифры — поглядите в книжку, там цифры, там графики, там формулы — черт ногу сломит.
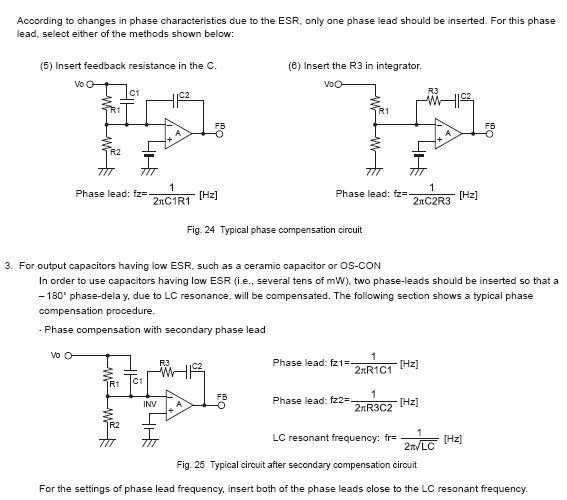
А вот в этом вот аттаче по-басурмански, но в то же время по божески написано.
Т.е. мы считаем частоту индуктора-выходной емкости по детской формуле для LC. Потом для этой же частоты по детской формуле RC считаем сопротивление и емкость в цепи обратной связи. А если у нас выходной конденсатор низкого сопротивления, то по этой же формуле еще раз считаем следующий конденсатор и пару для него берем сопротивление из высокого плеча делителя выходного напряжения.
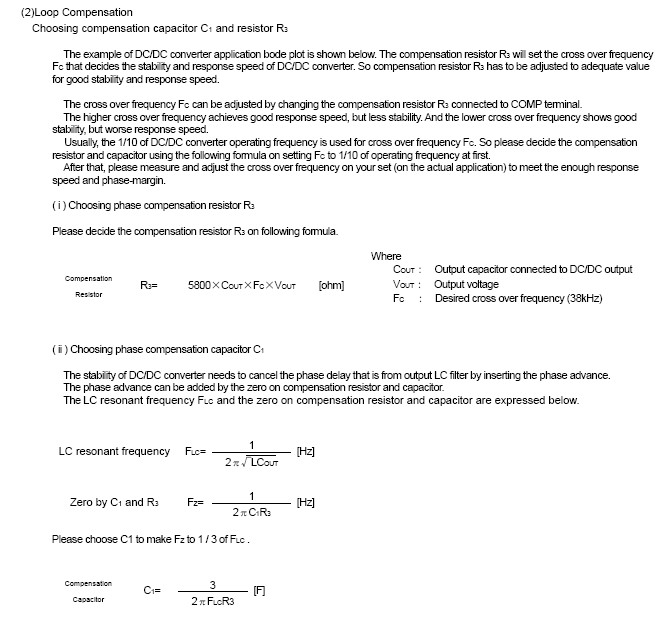
Правда там не сказано, от чего отталкиваться, выбирая соотношение для величины емкости и сопротивления. Т.е. знаем частоту, знаем формулу, но два неизвестных.
А вот в этом басурманском аттаче есть эмпирическая формула для подбора велиличны сопротивления в цепи обратной связи ОУ. R = 5800 * Cвых * Fперекрест * Vвых, где Fперекрест — численно принимается 1/10 от частоты работы преобразователя.
У меня вот получилось 100 КОм и 200 пикушек надо ставить.
Правда почему-то во 2м аттаче они емкость считают отталкиваясь от 1/3 частоты LC, что вносит несуразицу, т.к. в 1м аттаче считалось ровно по частоте LC. Но хотя бы примерный порядок для подбора величин эти данные простому юзеру дают.
Да, разобраться с коррекцией без «пол-литры» трудно.
Я несколько раз «тренировался», но так толком ни чего не понял до сих пор.
Сам автор пишет, что большинство специалистов не могут нормально расчитать эту «хитрую» коррекцию, по этому я, как не специалист, перестал комплексовать по этому поводу.
В общем, для каждой топологии есть своя схема компенсации, а эти схемы могут иметь ещё варианты. Если не заниматься проектированием ИБП постоянно, то вряд ли стоит изучать все эти тонкости. Тем более, что в даташитах, бывает, приводится типовой расчёт. Можно, так же, пользоваться готовыми программами, специализированными по расчёту БП на микросхемах одного производителя. Практически каждая фирма, производящая мс для ИБП делает и выкладывает на своём сайте такие проги.
В общем, теория теорией, а жизнь жизнью!
Позаписал я на осциллограф выходные напряжения преобразователя при разных нагрузках — и ужаснулся: напряжение пилообразное, резко возрастает и постепенно снижается с частотой десятки Гц.
К черту все вышеуказанные формулы. Выкинул нафиг расчетные детали из цепи обратной связи. И методом опытного подбора подобрал номиналы, проверяя качество выходного напряжения. Получилось нечто, похожее на номиналы из типовых схем. Единицы нанофарад и единицы кОм.
Ну, правда, не всю теорию забыл, а посчитал частоту LC и по той же частоте делал соотношение RC.
что и ТД тоесть в даташите в примерах уже указаны оптималные или близкие номиналы
Форум про радио — сайт, посвященный обсуждению электроники, компьютеров и смежных тем.
ШИМ, PWM контроллер. Усилитель ошибки. Частота. Инвертирующий, неинвертирующий входы. Синхронизация. Обратная связь. Применение
Резистор и конденсатор, задающие частоту работы контроллера (RT, CT). Контроллер работает на определенной частоте. Импульсы следуют с этой частотой. Контроллер меняет длительность импульсов, но не частоту. Это значит, что чем короче импульс, тем длиннее пауза и наоборот, а частота следования остается постоянной. Конденсатор, подключенный между CT и общим проводом, и резистор, подключенный между RT и общим проводом, задают частоту работы контроллера.

Импульсы синхронизации (CLOCK). Иногда необходимо заставить работать несколько контроллеров синхронно. Тогда к одному контроллеру (ведущему) подключают частотозадающие конденсатор и резистор. На ножке CLOCK ведущего контроллера появляются короткие импульсы напряжения. Эти импульсы подаются на ножки CLOCK других контроллеров (ведомых). Ножки RT ведомых контроллеров соединяются с VREF этих контроллеров, а ножки CT — с общим проводом.
Напряжение для сравнения (RAMP). На эту ножку нужно подать пилообразное напряжение. В момент возникновения импульса синхронизации на выходе контроллера появляется открывающее управляющее напряжение. Далее, как только напряжение на RAMP превышает напряжение на выходе усилителя ошибки на определенную величину, на выходе возникает закрывающее напряжение. Так что импульс длится от момента синхронизационного импульса до момента превышения напряжения на RAMP над напряжением выхода усилителя ошибки. Этим и достигается ШИМ. В классической схеме на RAMP подается напряжение с CT. Там как раз отличная пила. Есть и другие варианты включения.
Вашему вниманию подборки материалов:
Конструирование источников питания и преобразователей напряжения Разработка источников питания и преобразователей напряжения. Типовые схемы. Примеры готовых устройств. Онлайн расчет. Возможность задать вопрос авторам
Практика проектирования электронных схем Искусство разработки устройств. Элементная база. Типовые схемы. Примеры готовых устройств. Подробные описания. Онлайн расчет. Возможность задать вопрос авторам
Инвертирующий и неинвертирующий входы усилителя ошибки (INV, NONINV). На входе ШИМ контроллера стоит обычный операционный усилитель. Это его инвертирующий и неинвертирующий входы. Увеличение напряжения на неинвертирующем входе приводит к увеличению длительности импульсов, уменьшение — к уменьшению. С инвертирующим входом все наоборот. Обычно неинвертирующий вход подключают к ножке опорного напряжения, а на инвертирующий вывод подают выходное напряжение через делитель и цепь обратной связи.
Выход усилителя ошибки (EAOUT). Казалось бы, нет ничего проще. Подаем на NONINV опорное напряжение, но INV — часть выходного напряжения, такую, чтобы она равнялась опорному при нужном выходном. Но так ничего не получится в связи с тем, что преобразователь напряжения имеет довольно медленную реакцию на управление. Пока выходное напряжение увеличится или уменьшится, проходит довольно большое время. Так что если подать выходное напряжение через делитель непосредственно на INV, то полученная отрицательная обратная связь на некоторой частоте из-за задержки превратится в положительную. Устройство возбудится, на выходе появится вместо требуемого сигнал сложной формы. Из-за возбуждения устройство, скорее всего, выйдет из строя. Чтобы победить возбуждение, используется выход EOUT. С него сигнал через частотно зависимые цепи подается на INV, достигается частотная коррекция усилителя ошибки. Есть целая теория, которая описывает, как вычислить нужные номиналы частотокорректирующих цепей. Но проводя расчеты в соответствии с этой теорией, мы никогда не получали точно подходящих значений. Мы выработали собственную методику проектирования цепей обратной связи по напряжению. Об этом будет отдельная статья. Подпишитесь на новости, чтобы не пропустить
К сожалению в статьях периодически встречаются ошибки, они исправляются, статьи дополняются, развиваются, готовятся новые. Подпишитесь, на новости, чтобы быть в курсе.
Какая минимальная длинна импульса возможна в шим контроллерах (минимальный коэффициент заполнения)? На практике получается что, к примеру, sg3525 запускается с минимальной шириной примерно 1 микросекунда. Есть ли методика расчета этого параметра? Очень актуально при разработке импульсных блоков питания с регулировкой напряжения от нуля вольт. Читать ответ.
Конструирование (проектирование и расчет) источников питания и преобра.
Разработка источников питания и преобразователей напряжения. Типовые схемы. Прим.
Микроконтроллеры — пример простейшей схемы, образец применения. Фузы (.
Самая первая Ваша схема на микро-контроллере. Простой пример. Что такой фузы.
Защита силового ключа от перенапряжения. Сброс скачков напряжения на т.
Как защитить силовой транзистор от пробоя броском высокого напряжения. Описание .
Использование переключающихся конденсаторов в бестрансформаторном исто.
Вариант бестрансформаторной схемы источника питания с переключением конденсаторо.
Автомат периодического включения — выключения нагрузки. Схема, устройс.
Устройство, регулярно (три раза в день на полчаса) автоматически включающее и вы.
Оптроны, оптопары тиристорные, динисторные. MOC3061, MOC3062, MOC3063.
Описание и параметры MOC3061, MOC3062, MOC3063. Применение в тиристорных схемах .
Усилитель ошибки шим как работает
Назначение ШИМ-контроллера
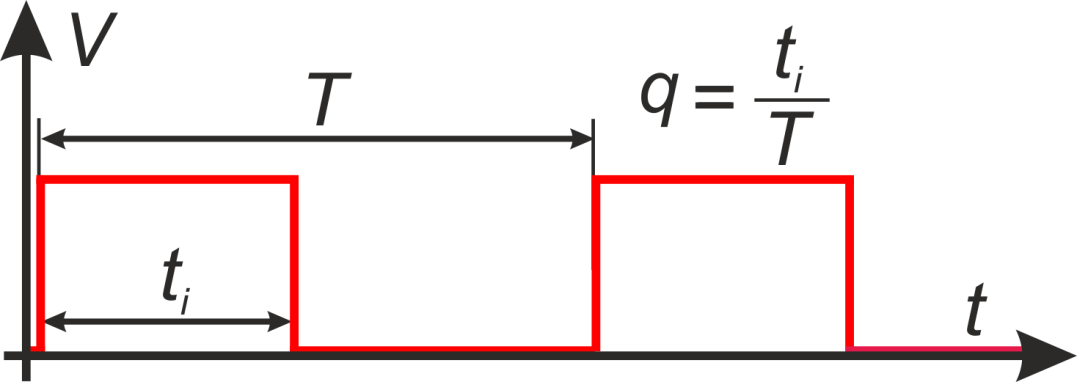
ШИМ-контроллер (PWM-контроллер) (от слова Широтно-Импульсная Модуляция) является управляющим элементом импульсного преобразователя. Он вырабатывает управляющие сигналы для силовых ключей преобразователя, модулируя длительность включенного и выключенного состояния в зависимости от выходного напряжения (тока). Основной параметр, который изменяется ШИМ-контроллером это коэффициент заполнения q, называемый также рабочим циклом, равный отношению длительности импульса включенного состояния силовых ключей ti ко всему периоду повторения импульсов T (рисунок PWMC.1):

ШИМ-контроллеры подразделяются в зависимости от типа преобразователя на:
— однотактные (рабочий цикл в теории 0-100%, на практике 0-96%);
— двухтактные (рабочий цикл в теории 0-50%, на практике 0-47%).
Внутренняя структура ШИМ-контроллера
ШИМ-контроллер содержит в себе следующие обязательные элементы:
— тактовый генератор с пилообразным выходным напряжением;
— источник опорного напряжения;
— широкополосный усилитель ошибки;
— выходные усилители тока.
Опциональными элементами, которые могут входить в состав ШИМ-контроллера являются:
— блокировка от пониженного напряжения питания;
— цепи внутреннего ограничения пикового тока нагрузки или ключевого элемента.
— вывод внешней блокировки;
— вывод внешней синхронизации;
— отключение при перегреве.
Принцип действия ШИМ-контроллера
Принцип действия ШИМ-контроллеров весьма прост: если управляющий сигнал, пропорциональный выходному напряжению (току) имеет малую величину, то контроллер выдает максимальный рабочий цикл и соответственно максимальную мощность. По мере увеличения управляющего сигнала рабочий цикл уменьшается и выходное напряжение стабилизируется на определенном уровне. Если нагрузка увеличивается, то контроллер отрабатывает это увеличивая рабочий цикл, и наоборот, при уменьшении нагрузки рабочий цикл уменьшается, а стабилизируемый параметр остается неизменным. Диапазон напряжений управляющего сигнала, в котором происходит изменение рабочего цикла от минимального значения до максимального является динамическим диапазоном ШИМ-контроллера. Чем меньше динамический диапазон, тем выше коэффициент стабилизации, однако, при этом высока вероятность возникновения паразитных апериодических колебаний.
Основные параметры ШИМ-контроллера
Основными параметрами ШИМ-контроллера являются:
— тип контроллера (однотактный, двухтактный) и преимущественное назначение (обратноходовый, прямоходовый, мостовой, повышающий, понижающий). Кроме контроллеров общего применения существуют специализированные контроллеры для конкретных технических решений.
— способ управления – сигнал обратной связи по напряжению. По току. По тому и другому и можно без хлеба…
— диапазон изменения рабочего цикла. Показывает минимальное и максимальное значения рабочего цикла для контроллера.
— максимальная рабочая частота контроллера – показывает максимальную частоту управляющих импульсов, вырабатываемых контроллером.
— «мертвое время» (deadtime) – задержка между управляющими сигналами разных каналов в двухтактных контроллерах. Как правило, предусмотрена возможность изменения величины мертвого времени
— диапазон напряжений питания контроллера. Нижняя граница показывает напряжение ниже которого контроллер не вырабатывает выходных импульсов управления (хотя тактовый генератор может работать).
— потребляемый ток. Как правило, имеется в виду собственное энергопотребление при нулевой нагрузке на выходные каскады. При управлении непосредственно затворами силовых транзисторов возникает дополнительное токопотребление. Оно зависит от частоты и емкости затвора. Методика расчета приведена в разделе «Управление MOSFET и IGBT транзисторами. Схемотехнические решения. Расчет».
— напряжение внутреннего источника опорного напряжения – выходного напряжение внутреннего ИОН, использующегося для питания внутренних цепей контроллера.
— выходной ток каналов управления контроллера. В большинстве случаев ШИМ-контроллеры имеют мощный выходной каскад, выполняющий функции драйвера для непосредственного управления затворами силовых MOSFET-транзисторов.
Опциональными функциями ШИМ-контроллеров являются:
— блокировка при понижении напряжения питания (Under−Voltage Lockout). Контроллер перестает вырабатывать управляющие импульсы, если напряжение питания опускается ниже определенной величины. Это особенно важно, если контроллер совмещает функции драйвера, поскольку при малой амплитуде управляющих сигналов поступающих на затворы транзисторов увеличиваются динамические потери и возможен переход в линейный режим с экстремальным рассеянием энергии на ключевых элементах, что приведет к их выходу из строя. Причем, как правило, имеется некоторый гистерезис по напряжению питания (рисунок PWMC.2).

— «мягкий» старт – функция, обеспечивающая постепенное увеличение длительности импульсов управления при включении (рисунок PWMC.3). Основное назначение – снижение токовых нагрузок на силовые ключи, возникающих при зарядке емкостей выходных фильтров. Крайне полезная функция при больших мощностях источника питания (более 500 Вт). Увеличивает живучесть импульсного источника питания. При наличии у контроллера этой функции можно задавать время плавного увеличения рабочего цикла.

— наличие входа блокировки. Вход блокировки обеспечивает возможность включения-выключения контроллера с использованием внешнего сигнала. Это удобно. В случае отсутствия специализированного входа блокировки всегда существует схемотехническое решение с использованием других входов для блокировки контроллера.
— возможность внешней синхронизации тактовой частоты, что позволяет создавать системы из нескольких синхронно работающих ШИМ.
— цепи внутреннего ограничения пикового тока нагрузки — дополнительная ОС по току.
Кроме этого существуют ШИМ-контроллеры, совмещающие в себе контроллер однотактного преобразователя и контроллер корректора фактора мощности (PFC).
Примеры ШИМ-контроллеров
Таблица PWMC.1 — Распространенные типы ШИМ-контроллеров
| Тип микросхемы | Описание | Максимальная рабочая частота |
| TL494 | Двухтактный ШИМ-контроллер, два усилителя ошибки, регулируемое «мертвое время», защита от понижения напряжения питания, выходные каскады на биполярных транзисторах с открытыми коллектором и эмиттером | 200 кГц |
| SG3525 | Двухтактный ШИМ-контроллер, один усилитель ошибки, регулируемое «мертвое время», защита от понижения напряжения питания, возможность реализации мягкого старта, выходные каскады на биполярных транзисторах | 400 кГц |
| TL594 | Модифицированный аналог TL494 | 300 кГц |
| UC3825, UC2825 (UC1825 family) | Быстродействующий двухтактный ШИМ-контроллер, один усилитель ошибки, один компаратор, защита от понижения напряжения питания, возможность реализации мягкого старта | 1 МГц |
| LM5030 | Двухтактный ШИМ-контроллер, рабочее напряжение питания – до 100 В, один усилитель ошибки, вход обратной связи по току, возможность реализации мягкого старта | 1 МГц |
| MC34025, MC33025 | Быстродействующий двухтактный ШИМ-контроллер, один усилитель ошибки, компаратор для ограничения тока, регулируемое «мертвое время», защита от понижения напряжения питания, возможность реализации мягкого старта | 1 МГц |