1 Электромеханические системы и устройства
Электромеханические системы занимают центральное место в подавляющем большинстве технических систем. Основная определяющая их функция — преобразование электрической энергии в управляемую механическую. Т.е. они обеспечивают возможность регулирования параметров механического движения объектов управления (скорость, ускорение, угловое или линейное перемещение, сила, момент и др.). Как правило, данная функция должна выполняться автоматически.
В промышленности, науке, в быту используются разнообразные машины, механизмы и устройства, которые облегчают деятельность человека, повышают производительность и качество, уровень безопасности и комфортности и т.д. Приведем несколько примеров:
в промышленности — приводы станков, бумагоделательных машин, подъемно-транспортного оборудования и др.
в научных исследованиях — приводы и следящие системы телескопов, системы пространственного управления лазерным излучением, прецизионные микроподвижки и т.д.
в быту — кондиционеры, пылесосы, стиральные и посудомоечные машины.
В данном курсе студенты должны познакомиться с основными типами электромеханических систем и устройств и входящими в их состав элементами, изучить принцип действия и их основные характеристики, получить необходимые знания и практические навыки по расчету и выбору исполнительных устройств, по способам управления ими и их математическому моделированию.
Все технические средства автоматики можно представить в виде иерархической структуры, состоящей из трех уровней:
1. Системы управления и автоматического регулирования (высший уровень).
2. Автоматические регуляторы, следящие приводы и подсистемы (средний уровень).
3. Элементы и устройства подсистем, регуляторов, приводов и систем автоматического управления (нижний уровень).
Предметом изучения данного курса является нижний — базовый
уровень элементной базы систем автоматического управления.
В настоящее время разрабатывается и выпускается огромное разнообразие электромеханических устройств и элементов, выполняющих одни и те же функции, но отличающихся по принципу действия, конструктивному исполнению, способам управления и т.д.
Будущим специалистам по разработке и эксплуатации систем автоматического управления необходимо не только хорошо знать элементную базу, но и уметь выбирать из нее самые рациональные варианты решений с учетом условий работы и предъявляемым техническим требованиям.
Рассмотрим два классических примера автоматических электромеханических систем.
Следящая система «угол-угол». Обеспечивает автоматическую отработку угла поворота объекта управления (антенна радиолокационной станции, видеокамера) по заданию оператора. Функциональная схема такой системы приведена на Рисунок1.
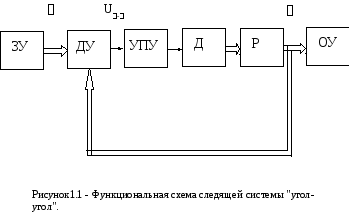
Система работает следующим образом. Оператор с помощью
задающего устройства (ЗУ) вводит угол , на который нужно повернуть объект управления (ОУ). ЗУ поворачивает на заданный угол входную ось датчика угла рассогласования (ДУ), который может быть реализован, например, на сельсинах или поворотных трансформаторах (один механически связан с задающим устройством, а второй с осью вращения объекта управления, а между собой они связаны электрически). В первый момент угол поворота ОУ отличается от угла задания . На выходе ДУ возникает напряжение U—, пропорциональное разности этих двух углов, которое подается на вход уcилительно-преобразовательного устройства (УПУ). УПУ выполняется обычно на полупроводниковых и интегральных элементах, его состав и структура определяются выбором типа исполнительного двигателя (Д). В конечном итоге УПУ должно обеспечить усиление сигнала рассогласования по мощности, достаточной для управления двигателем.
Под действием сигнала рассогласования двигатель начинает вращаться.
Начинает вращаться и объект управления, который механически связан через понижающий редуктор (Р) с валом двигателя. При этом разность углов и уменьшается, а в момент, когда она будет равна нулю, происходит остановка двигателя, так как U— тоже будет равно нулю. Таким образом, ОУ повернется на заданный угол .
Следящая система «угол-угол» по своему функциональному назначению и составу элементов является характерным примером электромеханических систем автоматического управления.
Другим примером может быть система автоматической стабилизации скорости вращения электродвигателя, широко используемая в том или ином исполнении во многих сложных технических устройствах. Функциональная схема системы стабилизации скорости приведена на рисунке 1.2.

Система стабилизации предназначена для поддержания заданной скорости вращения двигателя вне зависимости от изменений нагрузки (момента нагрузки на валу двигателя) и других внешних возмущающих факторов. В отличие от первого примера, в данной системе реализуется отрицательная обратная связь по скорости вращения двигателя. Для этой цели служит тахогенератор (ТГ), представляющий собой электромашинный преобразователь скорости вращения в пропорциональное ей электрическое напряжение. ТГ располагается на одной оси с двигателем (целый ряд современных двигателей содержат встроенный тахогенератор), а двигатель через редуктор связан с исполнительным органом (ИО), который необходимо вращать с постоянной заданной скоростью. Как и в первом примере здесь реализован принцип регулирования по отклонению. При отклонении скорости вращения ИО от заданной, в силу указанных выше причин, УПУ формирует сигнал рассогласования и подает его на управление двигателем, который изменяет скорость вращения, сводя это рассогласование к минимальному значению.
Анализируя состав и структуру рассмотренных систем можно увидеть в них много общего и сделать вывод о наличии некоторого базового комплекса элементов и устройств присущего электромеханическим системам. Этот комплекс называется — электроприводом. В его состав могут входить электромашинные устройства различного назначения (двигатели, преобразователи, генераторы и т.д.), электронные устройства (усилители, широтно-импульсные преобразователи, модуляторы и демодуляторы и т.д.) и
механические преобразовательные устройства (редукторы, винтовые и червячные передачи и др.).
Современный электропривод является индивидуальным автоматизированным электроприводом. Он включает в себя систему автоматического управления (САУ), которая в простейшем случае осуществляет пуск и останов электродвигателя, а в более сложных случаях управляет технологическим процессом приводимого в движение исполнительного механизма.
Мощность автоматизированного электропривода охватывает диапазон от нескольких долей ватта до десятков тысяч киловатт.
Автоматизированный электропривод делится на управляемый и неуправляемый, постоянного, переменного тока, транзисторный и тиристорный. До недавнего времени в качестве регулируемого электропривода применялся электропривод постоянного тока. В последние годы значительные успехи в силовой преобразовательной технике привели к созданию надежных регулируемых транзисторных и тиристорных электроприводов переменного тока. Так как двигатели переменного тока имеют неоспоримые преимущества перед двигателями постоянного тока (они значительно дешевле, надежнее, имеют лучшие массогабаритные показатели и относительно простую конструкцию) в ближайшие годы ожидается бурное развитие управляемого электропривода переменного тока. Этому способствует широкое внедрение в управляемый электропривод микропроцессорной техники.
Стремление к упрощению кинематических цепей машин и механизмов привело к созданию безредукторных электроприводов, которые по сравнению с редукторными обладают большей надежностью и быстродействием, технологичнее в изготовлении. Предельно упрощает кинематику машин применение управляемого электропривода на базе линейных электрических машин постоянного и переменного тока. При этом создаются максимальные удобства для оптимального конструирования машин с поступательным движением рабочих органов.
Приведем обобщенную функциональную схему электропривода, которая содержит все возможные устройства и поясняет их взаимодействие и взаимовлияние. Обобщенная функциональная схема электропривода приведена на рисунке 2.1, где ИЭ — источник энергии (промышленная электросеть, электромашинный генератор, аккумулятор), ЭПУ — электрическое преобразовательное устройство (управляемый выпрямитель, широтно-импульсный преобразователь, электронный или электромашинный усилитель), ДУ — двигательное устройство (электродвигатель, пьезоэлектрический или магнитострикционный двигатель, электромагнитный двигатель),

МПУ-механическое преобразовательное устройство (редуктор, шарико-винтовая или червячная передача, кинематическая передача), ИО- исполнительный орган рабочей машины (турбина, вентилятор, оптические элементы приборов), УУ- устройство управления
(микропроцессор, управляющая ЭВМ), ЗУ — задающее устройство (ЭВМ, аналоговое устройство), ДПИ — датчики преобразователи информации (тахогенератор, термопара, индуктивные и емкостные датчики), сплошными одинарными стрелками обозначены аналоговые электрические сигналы постоянного иди переменного тока, пунктирные стрелки обозначают сигналы, наличие которых или отсутствие, а также форма определяются условиями конкретной технической системы, двойные стрелки обозначают механические связи.
Функции, выполняемые устройствами, входящими в состав электропривода:
ИЭ -обеспечение электропитанием всех элементов и устройств электропривода;
ЭПУ- преобразует сигнал управления в форму требуемую данным двигательным устройством;
ДУ — преобразует электрическую энергию в механическую;
МПУ — обеспечивает изменение параметров вырабатываемой ДУ механической энергии;
ИО — выполняет заданные функции;
УУ-вырабатывает сигнал управления в функции задающего сигнала и различных дополнительных электрических сигналов, содержащих информацию о процессе преобразования энергии, реальных параметрах механического движения ДУ и ИО, кроме того, обеспечивает защиту и блокировку всех электромеханических устройств, входящих в составу электропривода.
ЗУ — формирует сигнал задания на УУ.
ДПИ — датчики-преобразователи информации служат для измерения различных координат электропривода (скорость вращения, ток, угол поворота и др.) и преобразования их в электрические сигналы одинакового вида.
Основными элементами электропривода являются электрические машины, которые могут выполнять функции двигательных устройств, источников энергии, датчиков преобразователей информации.
Электромеханическая система как объект автоматического управления
Рассмотрены вопросы построения микропроцессорных инвариантных систем управления электроприводами с эталонными динамическими моделями, формирующими оптимальное по критерию быстродействия изменение фазовых переменных электроприводов с учетом ограничения энергетических ресурсов. В основе предлагаемого подхода – теорема об n интервалах дискретного управления применительно к цифровым системам предельного быстродействия, а также адаптация нелинейной эталонной модели к заведомо непредсказуемым приращениям задающего воздействия и ограничениям старшей фазовой переменной за счет формирования переменного периода цифрового управления. На основе предложенного подхода разработана оригинальная методика синтеза эталонных моделей, обеспечивающих формирование переменного такта дискретного управления и оптимальность формирования до четырех фазовых переменных ЭМСУ по критерию быстродействия. Представлена функциональная структура электромеханической системы управления с адаптивной нелинейной эталонной моделью, имитационная модель в среде MexBIOSDevelopmentStudio и результаты имитационного моделирования, которые подтвердили эффективность предложенного подхода.

электромеханическая система управления
электропривод
предельное быстродействие
эталонная модель
имитационное моделирование
1. Башарин А.В., Новиков В.А., Соколовский Г.Г. Управление электроприводами. Л.: Энергоиздат, 1982. – 392 с.
2. Борцов Ю.А., Поляхов Н.Д., Путов В.В. Электромеханические системы с адаптивным и модальным управлением. – Л.: Энергоатомиздат, 1984. – 216 с.
3. Герман-Галкин С.Г. Matlab&Simulink. Проектирование мехатронных систем на ПК. – СПб: Изд-во Корона-Век, 2014. – 368 с.
4. Даденков Д.А., Казанцев В.П. Синтез электромеханических систем управления с нелинейной адаптивной эталонной моделью // Фундаментальные исследования. – 2014. – № 11–7. – С. 1466–1471.
5. Дорф Р. Современные системы управления / Р. Дорф, Р. Бишоп. Пер. с англ. Б.И. Копылова. Научное издание. – М.: Лаборатория Базовых Знаний, 2002. – 832 с.
6. Казанцев В.П., Даденков Д.А. Эталонные модели для систем управления фазовыми переменными технологических процессов и установок // Электротехнические комплексы и системы управления. – 2014. – № 3. – С. 57–61.
7. Казанцев В.П., Даденков Д.А. Эталонные модели относительного движения космических аппаратов в задачах формирования управляющих ускорений двигательных установок. // Современные проблемы науки и образования. – 2014. – № 4.
8. Казанцев В.П., Петренко В.И. Синтез дискретных систем управления линейными объектами произвольного порядка // Информационные управляющие системы / Перм.гос.техн. ун-т. Пермь, 1995. – С. 99–105.
9. Казанцев В.П., Даденков Д.А. Синтез дискретно-непрерывных систем управления электроприводами с упругими связями // Электротехника. – 2012. – № 11. – С. 24а–28.
10. Bobrow J.E. Time-optimal control of robotic manipulators along specified paths / J.E. Bobrow, S. Dubowsky, J.S. Gibson // Int. Journal Robotic Research. – 1985. – № 4(3). – Р. 3–17.
Современные автоматизированные и автоматические системы управления технологическими процессами (АСУТП) ориентированы на реализацию предельного быстродействия отработки задающих и возмущающих воздействий. Это предопределено, с одной стороны, требованиями форсирования производительности технологических процессов с учетом заданных ограничений на значения переменных процесса, с другой – возросшими возможностями программно-технической реализации сложных нелинейных алгоритмов управления на основе микропроцессорных контроллеров и сервоприводов [1–3].
Выходной переменной той или иной локальной электромеханической системы управления (ЭМСУ) в составе АСУТП является, как правило, либо скорость, либо положение (угловые или линейные) некоторого рабочего органа. В общем же случае в ЭМСУ выделяют до четырех фазовых переменных с интегро-дифференцирующими зависимостями: положение, скорость, ускорение, рывок [1, 2, 4, 6]. Поскольку в соответствии с общеизвестными положениями теории управления [5] управлять объектами, содержащими интеграторы второго и более высокого порядка с контролем только выходной переменной, не представляется возможным из-за потери устойчивости, то применяют декомпозицию объекта и введение обратных связей по ряду промежуточных переменных. Это позволяет организовать оптимальное в некотором смысле подчиненное регулирование координат электроприводов и, как следствие, компромиссное качество регулирования выходной переменной. При насыщении координаты управления или некоторой фазовой переменной, применяют нелинейные, например, параболические регуляторы с искусственно введенными ограничениями на коэффициент передачи для исключения образования предельных циклов вблизи установившихся состояний [1, 2]. Однако такой подход не позволяет в полной мере реализовать предельное быстродействие отработки заданных приращений выходной переменной.
Постановка задачи. Как известно [1, 2, 5], ограничение координат состояния электропривода (напряжений, токов, электромагнитных моментов, скорости вращения вала и др.) приводит к нелинейности математической модели ЭМСУ, однако большинство методов синтеза оптимального управления, в том числе по критерию быстродействия, ориентировано на линейные модели объектов управления.

Предлагаемый подход к построению ЭМСУ предельного быстродействия базируется на применении адаптивных к параметрам внешней среды эталонных моделей на входе замкнутых ЭМСУ, обеспечивающих формирование оптимальных по быстродействию изменений именно фазовых переменных [6–10]. К параметрам внешней среды будем относить, прежде всего, заведомо неизвестное во времени изменение положения рабочего органа, определяемое датчиками системы локации, технического зрения или иными внешними подсистемами, в том числе с участием оператора. Поскольку внешняя среда может накладывать ограничения на энергетические ресурсы ЭМСУ, то к параметрам внешней среды целесообразно отнести и ограничения на энергию управления. Проще всего это реализовать введением ограничения самой величины управления Um или старшей фазовой переменной.
Основная часть. На рис. 1 приведена обобщенная функциональная схема ЭМСУ, на которой приняты следующие обозначения: АЭМ – адаптивная эталонная модель, адаптер – устройство, обеспечивающее адаптацию АЭМ к параметрам внешней среды за счет формирования переменного такта управления Ti, ЭМСУ – электромеханическая система управления.

Рис. 1. Функциональная схема ЭМСУ

Рис. 2. Схема имитационного моделирования ЭМСУ с АЭМ

Рис. 3. Схема модели ЭМСУ
В основе решения задачи синтеза оптимального по быстродействию управления ЭМСУ с АЭМ лежат следующие положения.
АЭМ представляет собой замкнутую по вектору состояния дискретно-непрерывную систему финитного управления [1, 2, 6–8]. При этом в качестве объекта управления в самой АЭМ выступает интегратор первого-четвертого порядка, что, по сути, отражает интегро-дифференцирующие связи до четырех заданных фазовых переменных инвариантной ЭМСУ – положения φ*(t), скорости ω*(t), ускорения ε*(t) и рывка ρ*(t).
Векторы фазовых переменных ЭМСУ и АЭМ (рис. 1) в общем случае могут быть представлены в виде:

,

.
Поскольку состояние внешней среды априори неизвестно, будем полагать, что начальные значения всех фазовых переменных АЭМ при синтезе могут быть приняты нулевыми:

.

Тогда период Ti дискретного управления в АЭМ может быть представлен нелинейной функцией приращения задающего воздействия в некоторые дискретные моменты времени (i = 0, 1, 2,…) и предельно допустимого управления Um, т.е. параметров внешней среды.
Для принятого порядка АЭМ анализ соотношений относительных изменений фазовых переменных в переходных процессах позволяет получить значения переменного периода управления в дискретные моменты времени изменения задающего воздействия:

– n = 1: ; (1)

– n = 2: ; (2)

– n = 3: ; (3)

– n = 4: . (4)
При условии, что максимальное управление численно равно максимальному значению старшей фазовой переменной, рассчитанные по выражениям (1) – (4) периоды дискретного управления гарантированно обеспечивают ограничение наиболее быстрой старшей фазовой переменной на допустимом уровне.
Критерий качества, лежащий в основе синтеза замкнутой АЭМ, представляет собой предельное быстродействие в концепции цифровых финитных систем управления:

, (5)
где n – число тактов дискретного управления, равное числу интеграторов АЭМ; соответственно оптимальное конечное время отработки приращения задающего воздействия составит именно n периодов управления, причем длительность периодов управления в соответствии с (1) – (4) является варьируемой.
Дискретное финитное управление состоянием АЭМ в соответствии с (1) – (5) является нелинейной функцией переменного периода Ti:

, (6)

где – вектор ошибок отработки приращений фазовых переменных АЭМ в i-й дискретный момент времени; β(Ti) – матрица-строка переменных коэффициентов, являющаяся результатом синтеза оптимального по критерию (5) управления, процедура синтеза которого подробно изложена в [8, 9].
Ниже представлены результаты синтеза для АЭМ первого-четвертого порядка:

– n = 1: ; (7)

– n = 2: ; (8)

– n = 3: ; (9)

– n = 4: . (10)
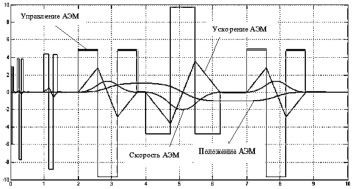
Рис. 4. Результаты моделирования процессов в АЭМ
Инвариантная по отношению к задающему воздействию ЭМСУ отрабатывает эталонные задающие воздействия X*(t) фазовых переменных. В общем случае – это заданное положение φ*(t) рабочего органа и его три производных по времени – скорость, ускорение, рывок. Форма представления сигналов определяется формой сигналов задающих воздействий самой ЭМСУ и параметрами линии связи АЭМ и ЭМСУ. Это могут быть аналоговые, цифровые или широтно-импульсные сигналы.
На рис. 2 приведена схема имитационного моделирования ЭМСУ с АЭМ в интегрированной программной среде MexBIOS Development Studio. При моделировании принято: выходная координата ЭМСУ – положение (рад), порядок АЭМ n = 3; минимальный период управления, определяющий зону линейности модели АЭМ Tmin = 0,005 c; уровень ограничения дискретного регулятора состояния АЭМ и рывка электропривода Um = 10 рад/c 3 .
Обозначения модулей-подпрограмм на схеме: TestSignal – модуль формирования задающих воздействий, где приняты дискретные моменты времени изменения задающих воздействий (с): t0 = 0, t1 = 0,2, t2 = 1,0, t3 = 2, t4 = 4, t5 = 7 и ступенчатые приращения задающего воздействия (положения ЭМСУ, рад):  = 0,0001,
= 0,0001,  = 0,0009,
= 0,0009,  = 0,009,
= 0,009,  = 0,99,
= 0,99,  = – 2,0,
= – 2,0,  = 1; SolverTvar – модуль вычисления переменного периода управления АЭМ в соответствии с выражением (3); EM Object – объект управления АЭМ, представляющий собой идеальный интегратор 3-го порядка; EM Regulator – регулятор АЭМ, представляющий собой дискретный регулятор состояния с переменным периодом управления, формирующий оптимальное управление АЭМ в соответствии с формулами (6), (9); EMCS – квазиинвариантная по заданию электромеханическая система управления электроприводом постоянного тока, представленная, например, в виде оптимальной по быстродействию замкнутой по состоянию непрерывной системы управлением (рис. 3); StepLoad– модуль формирования ступенчатой нагрузки на валу электропривода. Принято, что нагрузка соответствует статическому току двигателя 2,5 А, время ступенчатого приложения нагрузки – 9,5 с.
= 1; SolverTvar – модуль вычисления переменного периода управления АЭМ в соответствии с выражением (3); EM Object – объект управления АЭМ, представляющий собой идеальный интегратор 3-го порядка; EM Regulator – регулятор АЭМ, представляющий собой дискретный регулятор состояния с переменным периодом управления, формирующий оптимальное управление АЭМ в соответствии с формулами (6), (9); EMCS – квазиинвариантная по заданию электромеханическая система управления электроприводом постоянного тока, представленная, например, в виде оптимальной по быстродействию замкнутой по состоянию непрерывной системы управлением (рис. 3); StepLoad– модуль формирования ступенчатой нагрузки на валу электропривода. Принято, что нагрузка соответствует статическому току двигателя 2,5 А, время ступенчатого приложения нагрузки – 9,5 с.
Обозначения приведенные на схеме: Int1, Int2 – идеальные интеграторы, моделирующие соответственно интегро-дифференцирующие связи между положением и скоростью, скоростью и ускорением (динамическим моментом); TransferFcn – инерционное звено 1-го порядка, аппроксимирующее замкнутый контур регулирования тока якоря (электромагнитного момента); Saturation– звено динамического ограничения, позволяющее ограничить ток якоря на допустимом уровне с возможностью внешнего управления уровнем ограничения; Gain1 – Gain5 – масштабирующие звенья, моделирующие параметры регулятора состояния и полученные в соответствии с методикой, изложенной в [8, 9].
На рис. 4 приведены результаты моделирования процессов в АЭМ, на рис. 5 – в ЭМСУ. Обозначения графиков переменных приведены непосредственно на рисунках, по осям абсцисс – время (с), по осям ординат – абсолютные значения моделируемых переменных.
Анализ результатов моделирования позволяет сделать следующие выводы:
– АЭМ формирует оптимальные по быстродействию задания фазовых переменных, причем ограничение рывка ЭМСУ на уровне 10 рад/с3 происходит только при достаточно больших приращениях задания, сформированных внешней средой, в частности, на 2-й, 4-й и 7-й секундах (рис. 4);
– ЭМСУ отрабатывает эталонное задание фазовых переменных с минимальной инерцией, практически дублируя задание и обеспечивая тем самым предельное быстродействие системы (рис. 5).

Рис. 5. Результаты моделирования процессов в ЭМСУ
Заключение
В результате проведенных исследований предложен новый подход к построению предельных по быстродействию электромеханических систем управления с адаптивными к параметрам внешней среды эталонными моделями. На основе предложенного подхода разработана оригинальная методика синтеза эталонных моделей, обеспечивающих формирование переменного такта дискретного управления и оптимальность формирования до четырех фазовых переменных ЭМСУ по критерию быстродействия. При этом реализуется возможность ограничения на допустимом уровне старшей фазовой переменной и, соответственно, энергии управления. Результаты имитационного моделирования подтвердили эффективность предложенного подхода.
Рецензенты:
Бочкарев С.В., д.т.н., доцент, профессор кафедры микропроцессорных средств автоматизации, ФГБОУ ВПО «Пермский национальный исследовательский политехнический университет», г. Пермь;
Цаплин А.И., д.т.н., профессор, зав. кафедрой общей физики, ФГБОУ ВПО «Пермский национальный исследовательский политехнический университет», г. Пермь.
Лекция №1 — Понятие о системах управления электроприводов

В теории автоматического управления (ТАУ) используется термин «система автоматического управления» (САУ), который объединяет две составные части системы: «управляющее устройство» и «объект управления».
Данное понятие абстрагируется от физической природы САУ и представляет собой математическое описание — математическую модель некоторой подразумеваемой физической системы.
В прикладных работах по автоматическому управлению вместо термина САУ используется понятие
« Динамическая система » ‑ физическая система, объединяющая две части:
- систему управления — совокупность различных технических средств управления;
- объект управления — некоторую техническую систему (рис. 1).
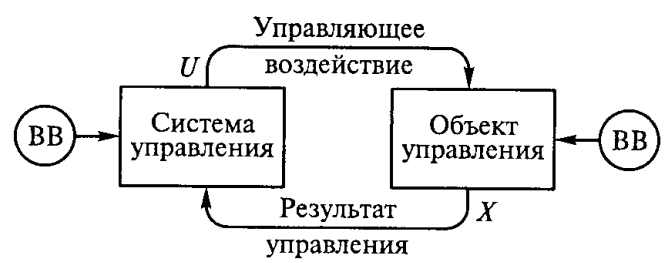
Рисунок 1. Общий вид контура управления
Обе части динамической системы могут иметь внешние воздействия (ВВ) — входные задающие и возмущающие воздействия.
Под термином « система управления электропривода » подразумевается комплекс технических средств, формирующих и осуществляющих воздействия на двигатель с целью управления движением рабочего органа (РО) производственной установки в соответствии с технологическими требованиями.
В понятии СУЭП конкретизируется объект управления, которым является двигатель (Д) совместно с механической передачей (МП) и рабочим органом.
В составе СУЭП выделяется:
- слаботочная часть , формирующая алгоритм управления, и
- силовую часть , осуществляющую силовое управляющее воздействие на двигатель.
По функциональному назначению управление в электроприводах разделяется на два уровня:
— верхний — технологический, внешний уровень, и
— нижний — внутренний.
На верхнем уровне СУЭП1 вырабатывает технологическое задание отдельной технической установки (например, станка, крана, лифта) или целой технологической системы (например, системы водоснабжения, теплоснабжения, электроснабжения).
На систему управления нижнего уровня (СУЭП2) возлагается задача формирование свойств собственно электропривода, его статических, динамических, точностных характеристик (рис. 2).
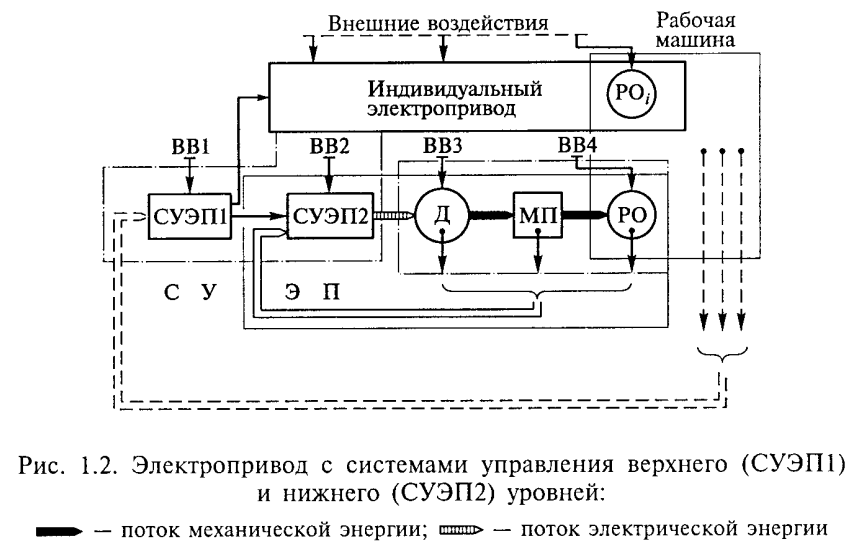
Помимо СУЭП2, это понятие включает в себя двигатель (Д), механическую передачу (МП) и рабочий орган (РО).
СУЭП2, Д, МП, РО, имеющие друг с другом внешние и внутренние обратные связи, образуют совместно единую динамическую электромеханическую систему. Вход ‑ задающий сигнал на СУЭП2, выход — движение РО.
Если двигатель приводит в движение только один РО, то электропривод называют индивидуальным электроприводом. Объектом управления для СУЭП1 может быть как один электропривод, так и совокупность всех индивидуальных электроприводов производственной установки.
Задачи, возлагаемые на СУЭП1 и СУЭП2
на примере электропривода лифта.
СУЭП1 вырабатывает команды автоматического выбора направления движения кабины, начала движения, торможения и остановки, определения этажей для остановок.
СУЭП2 формирует плавные динамические процессы разгона и торможения двигателя, обеспечивает необходимые для точной остановки диапазон регулирования скорости и жесткость механических характеристик двигателя.
СУЭП1 и СУЭП2 конструктивно могут быть выполнены из разных блоков, но могут и объединяться в общей панели управления или в программируемом контроллере.
Классификация систем управления электроприводов
Автоматизированные системы подразделяются на два типа:
- незамкнутые — без учета результата управляющего воздействия на объект управления;
- замкнутые — с учетом через обратные связи результата воздействия на объект управления.
В основе замкнутых систем лежит принцип обратной связи, управление по отклонению.
Дополнением является комбинированное управление, когда, кроме отклонения от задания, вводится в управление возмущающее воздействие.
Задачи СУЭП:
- стабилизация координаты объекта управления;
- программное управление по заранее известному закону;
- слежение за измеряемой величиной, закон изменения которой заранее неизвестен;
- самонастройка (адаптация).
Дополнительные признаки классификации СУЭП:
- уровень управления:
— нижний (свойства электропривода);
- тип алгоритма управления:
— линейный; нелинейный;
— аналитический;
— логический на основе жесткой (классической) логики;
— логический на основе нежесткой фаззи-логики;
- способы управления:
o модальное управление;
o каскадное (подчиненное);
o частотное скалярное управление;
o частотное векторное управление;
- технологическая координата электропривода:
— скорость рабочего органа;
— положение рабочего органа;
— двигатель постоянного тока;
— вентильный;
— индукторный;
— вентильно-индукторный;
— асинхронный;
— синхронный;
- элементная база СУЭП:
— аналоговая;
— цифровая;
— релейно-контакторная;
— логическая бесконтактная (логические элементы, контроллеры).
Система автоматического управления САУ-КМТ-ДК-ЭЛЕКТРО на базе силовых модулей мощностью до 400 КВт

Гарантии: 100% гарантия качества на весь ассортимент. Продукция поставляется с первичной заводской поверкой.
Система автоматического управления САУ-КМТ-ДК-ЭЛЕКТРО на базе силовых модулей мощностью до 400 КВт применяется для:
- автоматического поддержания заданных параметров технологических процессов;
- эффективного контроля, управления, защиты электропривода в составе технологического оборудования;
- оперативного сбора, обработки, отображения, хранения и защиты информации технологических параметров работы объекта;
- оптимизации режимов работы технологического оборудования;
- экономии энергоресурсов;
- снижения затрат человеческих ресурсов, а также влияния человеческого фактора на объект автоматизации.
- три способа управления: от силового модуля (СМ), от пульта местного управления (ПМУ) и дистанционное управление (ДУ);
- два режима управления: автоматический и ручной;
- три режима работы: от частотного преобразователя, от устройства плавного пуска, прямой пуск.
Область применения «САУ-КМТ-ДК-Электро»:
- водопроводные насосные станции (ВНС);
- канализационные насосные станции (КНС);
- питательные насосные станции;
- оросительные насосные станции;
- вакуумные насосные станции;
- насосные станции повышения давления;
- насосные станции тепловых пунктов;
- насосные станции ливневых и сточных вод;
- дренажные насосные станции;
- насосные станции технологического водоснабжения;
- компрессорные станции;
- конвейерные линии и транспортеры;
- подъемные механизмы;
- механизмы перемещения и передвижения;
- системы вентиляции и кондиционирования;
- системы сушильных камер;
- другие объекты, где в качестве технологического оборудования используется электропривод.
«САУ-КМТ-ДК-Электро» применяется для управления электроприводами насосных агрегатов, вентиляторов, воздуходувок, компрессоров, экструдеров, транспортеров, центрифуг, шнеков, сепараторов, мельниц, дробилок и других механизмов.
Технические характеристики
- Номинальное напряжение сети 380В. 50 Гц.
- Диапазон мощностей до 400 кВт.
- Климатическое исполнение по ГОСТ15150-69-У3.
- Степень защиты по ГОСТ14254-80 — IР21, IР54.
- Рабочее положение — вертикальное.
- Станция соответствует требованиям: ГОСТ 22789-94, “ПУЭ” и ПТЭЭП”.
- КПД 98%
Похожие приборы и аналоги