1.2. Классификация механических характеристик.
Для рассмотрения свойств механических характеристик можно воспользоваться упрощенной формулой, справедливой для большинства механизмов:
Исходя из этой формулы можно выделить четыре типа механических характеристик:
1) не зависящая от скорости механическая характеристика
2) линейно возрастающая механическая характеристика
3) нелинейно возрастающая характеристика (параболическая)
4) нелинейно спадающая характеристика
, — обратно пропорционален скорости.

Рис. 1-4. Основные типы механических характеристик.
Механической характеристикой электродвигателя называется зависимость его скорости от вращающего момента, т. е. .

П очти все электродвигатели обладают тем свойством, что скорость их является убывающей функцией момента двигателя. Это относится почти ко всем обычным электродвигателям, применяемым в промышленности. Однако степень изменения скорости с изменением момента у разных двигателей различна и характеризуется так называемой жесткостью их механических характеристик.
Механические характеристики электродвигателей можно разделить на три основные категории:
1. Абсолютно жесткая механическая характеристика, при которой скорость с изменением момента остается неизменной. Такой характеристикой обладают синхронные двигатели (прямая 1 на рис. 1-5).
Рис. 1-5. Механические характеристики двигателей.
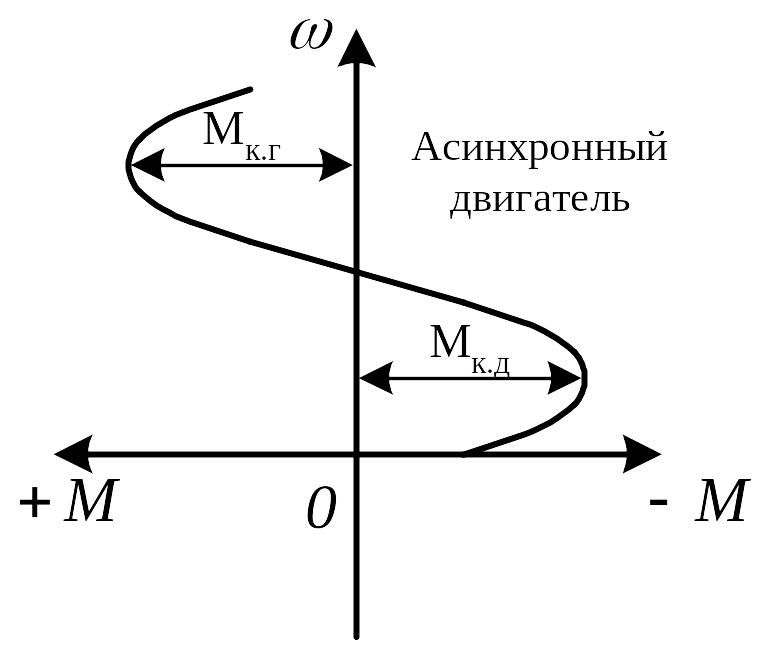
. Жесткая механическая характеристика, при которой скорость с изменением момента хотя и уменьшается, но в малой степени. Жесткой механической характеристикой обладают двигатели постоянного тока независимого возбуждения, а также асинхронные двигатели в пределах рабочей части механической характеристики (кривая 2 на рис. 1-5). Для асинхронного двигателя степень жесткости в различных точках механической характеристики различна (рис. 1-6). Между наибольшими (критическими) значениями моментов в двигательном и генераторном режимах характеристика асинхронного двигателя оказывается сравнительно жесткой.
3
Рис. 1-6. Механическая характеристика асинхронного двигателя.
. Мягкая механическая характеристика отличается значительным изменением скорости с изменением момента. Такой характеристикой обладают двигатели последовательного возбуждения, особенно в зоне малых моментов (кривая 3 на рис. 1-5). Для этих двигателей степень жёсткости не остаётся постоянной для всех точек характеристики. Двигатели смешанного возбуждения могут быть отнесены ко второй или третьей группе в зависимости от степени жёсткости механической характеристики.
1.3. Механические характеристики двигателя постоянного тока независимого возбуждения.
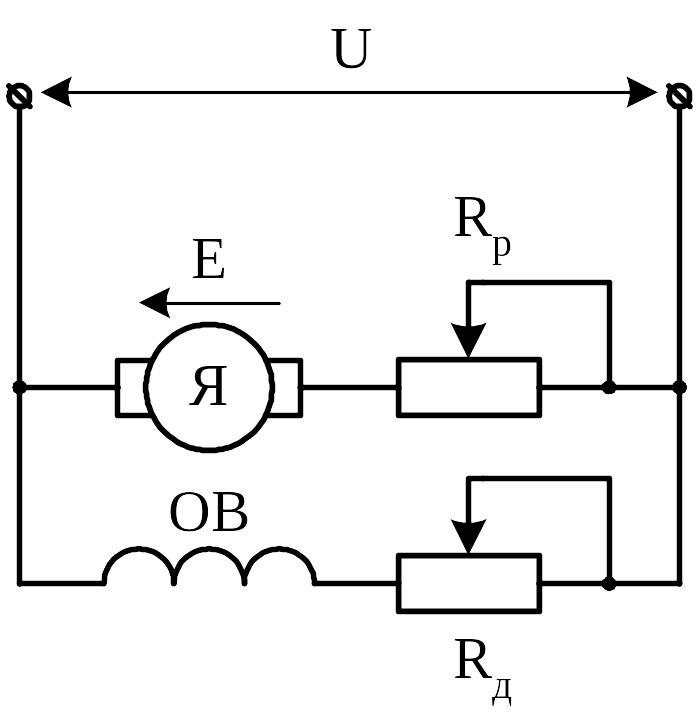
Рис. 1-7. Схема включения двигателя постоянного тока
В установившемся режиме работы двигателя приложенное напряжение U определяется последующему выражению:
где Iя — ток якорной цепи,
— суммарное сопротивление якорной цепи, .
Мгновенное значение ЭДС:
где С — конструктивный коэффициент,
N — число активных проводников обмотки якоря,
а — число пар параллельных ветвей обмотки якоря.
Подставив 1.2 в 1.1 получим:
Выражение 1.3 (зависимость угловой скорости вращения от тока в якоре) принято называть скоростной характеристикой двигателя.
Для получения уравнения механической характеристики необходимо найти зависимость скорости вращения от момента двигателя.
Момент, развиваемый двигателем, связан с током якоря и магнитным потоком следующей зависимостью:
Подставив формулу 1.5 в 1.3, получим:
Выражение 1.6 — механическая характеристика двигателя.

Н а рис. 1-8 представлены механические характеристики двигателя независимого возбуждения для различных сопротивлений в якорной цепи. При М = 0 все характеристики проходят через одну точку, расположенную на оси ординат. Скорость в этой точке называется скоростью идеального холостого хода (обозначается ) и определяется по формуле:
Рис. 1-8. Механические характеристики двигателей независимого возбуждения
ерхняя характеристика из всех, изображённых на рис. 1-8 принято называть естественной.
Естественной характеристикой называется такая характеристика двигателя, которая получается при отсутствии внешних сопротивлений в якорной цепи и номинальных значениях напряжения и магнитного потока.
Если в цепь якоря двигателя включено дополнительное сопротивление (реостат), то механические характеристики, получаемые при этом, называются искусственными или реостатными.
Реостатные характеристики имеют значительно больший наклон к оси моментов, чем у естественной характеристики, т.е. обладают меньшей жёсткостью. Чем больше введённое в цепь якоря сопротивление, тем круче идёт характеристика, тем меньше её жёсткость.
Что называется механической характеристикой электродвигателя
Requested virtual server does not exist or temporarily unavailable.
Возможные причины ошибки:
Possible causes of error :
-
Сервер, на котором размещён данный ресурс перегружен;
The server is overloaded;
The virtual server has been incorrectly configured;
Service for requested resource is suspended;
Свяжитесь с нами для получения подробной информации. Контакты
Contact us for more information. Our contacts
Механические характеристики электродвигателей
Механические характеристики электродвигателей являются основным критерием для оценки совместимости двигателей с разными типами оборудования, поскольку отражают взаимосвязь переменных (частоты вращения ротора, момента нагрузки) при работе в установившихся режимах.
Механические характеристики электродвигателей — основные типы
В качестве критерия оценки механических характеристик двигателей выступает понятие жесткости (β, рассчитывается по формуле dМ/dω), которая определяет зависимость между изменением момента двигателя (dМ) и соответствующим изменением угловой скорости (dω). Значение параметра β постоянно только для линейных характеристик. По признаку жесткости характеристики могут относиться к таким типам, как:
- жесткие, когда при изменении нагрузки в пределе от 0 до номинального значения происходит несущественное (не более 10%) изменение скорости вращения (присущи наиболее распространенным в промышленности асинхронным двигателям);
- абсолютно жесткие, при которых наблюдается сохранение неизменной скорости вращения при изменении нагрузки;
- мягкие (скорость вращения претерпевает значительные изменения при сравнительно небольших изменениях нагрузки).
В целом все механические характеристики подразделяются на естественные (на двигатель влияют только номинальные параметры) и искусственные (снимаются при введении в цепь добавочных элементов – резисторов и пр.).
Параметры электродвигателей и характеристики механизмов
Для нормального функционирования электропривода важны как параметры электродвигателей, так и свойства сопряженных с ними устройств. Существует зависимость между приведенными к валу двигателя моментом сопротивления и угловой скоростью вращения механизма. По этому признаку характеристики наиболее типичных производственных механизмов подразделяются на группы, в которых:
- зависимость момента сопротивления (Мс) от скорости отсутствует (лебедки, подъемные краны);
- зависимость Мс от скорости линейна (приводы генераторов постоянного тока);
- наблюдается нелинейное возрастание Мс (гребные винты, вентиляторы, центробежные насосы);
- Мс является нелинейно спадающим (механизмы главного движения станков для резки металла).
Выбор электродвигателей с оптимальным набором механических характеристик способствует эффективности решения производственных задач.
Механической характеристикой электродвигателя
Документ предоставляется как есть, мы не несем ответственности, за правильность представленной в нём информации. Используя информацию для подготовки своей работы необходимо помнить, что текст работы может быть устаревшим, работа может не пройти проверку на заимствования.
Если Вы являетесь автором текста представленного на данной странице и не хотите чтобы он был размешён на нашем сайте напишите об этом перейдя по ссылке: «Правообладателям»
Можно ли скачать документ с работой
Да, скачать документ можно бесплатно, без регистрации перейдя по ссылке:
1. Механической характеристикой электродвигателя называется:
• зависимость частоты вращения двигателя от тока якоря;
• *зависимость частоты вращения от величины вращающего электромагнитного момента;
• зависимость частоты вращения двигателя от момента нагрузки.
2. По степени управляемости электропривод может быть:
• нерегулируемый, следящий, программно-управляемый, регулируемый;
• нерегулируемый, следящий, редукторный, программно-управляемый, регулируемый;
• *нерегулируемый, адаптивный, следящий, программно-управляемый, регулируемый.
3. Первый электродвигатель, с помощью которого осуществлён электропривод, был построен в 1834-1838 гг. академиком:
• А. Пачинотти;
• *Б. С. Якоби;
• М. О. Доливо-Добровольским.
4. Уравнение движения электропривода, отражающее его динамику, имеет вид:
• * ;
• ;
• .
5. Привод считают асимптотически устойчивым, если в точке установившегося режима выполняется соотношение:
• * ;
• ;
• .
6. Уравнение электромеханической характеристики для скорости двигателя постоянного тока с последовательным возбуждением имеет вид:
• ;
• ;
• * .
7. В двигателе постоянного тока независимого возбуждения тормозной момент при динамическом торможении, если пренебречь реакцией якоря, может быть выражен равенством:
• * ;
• ;
• .
8. В каких тормозных режимах может работать асинхронный двигатель?:
• при динамическом торможении и торможении с отдачей энергии в сеть;
• *при динамическом торможении, торможении противовключением, торможении с отдачей энергии в сеть;
• при динамическом торможении и торможении противовключением.
9. Режим торможения противовключением может быть получен тогда, когда:
• момент нагрузки равен пусковому моменту;
• момент нагрузки меньше пускового момента;
• *момент нагрузки больше пускового момента.
10. Переходным режимом электропривода называют режим работы при переходе от одного установившегося состояния к другому, когда изменяются:
• скорость и момент;
• ток;
• *скорость, момент, ток.
11. Уравнение механической характеристики двигателя постоянного тока независимого возбуждения имеет вид:
• * ;
• ;
• .
12. Уравнение механической характеристики двигателя постоянного тока последовательного возбуждения имеет вид:
• ;
• * ;
• .
13. Схема включения какого двигателя изображена на рисунке?:
• *схема включения двигателя постоянного тока последовательного возбуждения;
• схема включения двигателя постоянного тока независимого возбуждения;
• схема включения двигателя постоянного тока смешанного возбуждения.
14. В каких тормозных режимах может работать двигатель последовательного возбуждения?:
• при динамическом торможении и торможении с отдачей энергии в сеть;
• при торможении с отдачей энергии в сеть и торможении противовключением;
• *при торможении противовключением и динамическом торможении.
15. У двигателей с фазным ротором…:
• *начальный пусковой момент увеличивается по мере возрастания до известных пределов сопротивления резистора, а пусковой ток при увеличении сопротивления уменьшается;
• начальный пусковой момент уменьшается по мере возрастания до известных пределов сопротивления резистора, а пусковой ток при увеличении сопротивления увеличивается;
• начальный пусковой момент увеличивается по мере возрастания до известных пределов сопротивления резистора, а пусковой ток при увеличении сопротивления увеличивается.
16. Динамическое торможение асинхронного двигателя возможно:
• при скорости выше синхронной;
• при движущем моменте нагрузки;
• *при включении обмотки статора на сеть постоянного тока.
17. При каких условиях асинхронный двигатель в режиме динамического торможения оказывается с сильно насыщенной магнитной системой.
• *при малых угловых скоростях ротора и большом эквивалентном токе;
• при больших угловых скоростях и большом эквивалентном токе;
• при малых угловых скоростях и малом эквивалентном токе.
18. Какое торможение чаще всего применяют на практике, когда требуется осуществить перемену направления вращения?
• динамическое торможение;
• *торможение противовключением;
• торможение с отдачей энергии в сеть.
19. Какая схема синхронного двигателя изображена на рисунке?
• *схема включения синхронного двигателя при динамическом торможении;
• схема включения синхронного двигателя при торможении противовключением;
• схема включения синхронного двигателя при торможении с отдачей энергии в сеть.
20. Какая схема двигателя постоянного тока изображена на рисунке?
• схема включения двигателя постоянного тока последовательного возбуждения при динамическом торможении с независимым возбуждением;
• *схема включения двигателя постоянного тока последовательного возбуждения при динамическом торможении с самовозбуждением;
• схема включения двигателя постоянного тока смешанного возбуждения.
21. По какой формуле можно вычислить уравнение механической характеристики двигателя постоянного тока последовательного возбуждения?
• * ;
• ;
• .
22. По какой формуле можно вычислить уравнение механической характеристики двигателя постоянного тока независимого возбуждения?
• ;
• * ;
• .
23. Какая схема асинхронного двигателя изображена на рисунке?
• *схема включения асинхронного двигателя при торможении с самовозбуждением;
• схема включения асинхронного двигателя при динамическом торможении;
• схема включения асинхронного двигателя для перехода на режим динамического торможения.
24. Механическая характеристика асинхронного двигателя для режима противовключением не обеспечивает устойчивую работу. При двигатель надо отключить, иначе он
• останется неизменным
• *перейдет в двигательный режим
• перейдет в режим с отдачей энергии в сеть
25. Синхронный двигатель перестает работать, если
• момент нагрузки равен моменту двигателя
• *момент нагрузки больше момента двигателя
• момент нагрузки меньше момента двигателя
26. С увеличением момента нагрузки угол между напряжением и ЭДС
• *возрастает
• уменьшается
• остается неизменным
27. Потери мощности на валу двигателя определяю КПД привода по формуле
• *
•
•
28. Коэффициент мощности определяется по формуле
• *
•
•
29. Номинальным коэффициентом мощности считают равным
• 0.6…0.7
• 0.7…0.8
• *0.8…0.9
30. Стабильность угловой скорости зависит от жесткости механической характеристики. Как?
• *чем жестче механическая характеристика, тем выше стабильность угловой скорости
• чем мягче механическая характеристика, тем выше стабильность угловой скорости
• при неизменной механической характеристики стабильность угловой скорости выше
31. Выберите правильное утверждение
• *При холостом ходе реактивная мощность большая, активная маленькая, а при нагрузке активный расчет быстрее реактивного и повышается до номинального значения
• При холостом ходе реактивная мощность маленькая, активная маленькая, а при нагрузке активный расчет быстрее реактивного и повышается до номинального значения
• При холостом ходе реактивная мощность маленькая, активная большая, а при нагрузке активный расчет быстрее реактивного и повышается до номинального значения
32. Диапазон регулирования угловой скорости определяется по формуле
•
•
• *
33. Основными показателями, характеризующими различные способы регулирования скорости электроприводов, являются
• *диапазон регулирования, экономичность, плавность, стабильность скорости, направление регулирования скорости, допустимая нагрузка при различных скоростях
• диапазон регулирования, экономичность, стабильность скорости, направление регулирования скорости, допустимая нагрузка при различных скоростях
• диапазон регулирования, плавность, стабильность скорости, направление регулирования скорости, допустимая нагрузка при различных скоростях
34. Коэффициент плавности регулирования определяется по формуле
•
•
• *
35. Регулирование уменьшением магнитного потока ведет в пределах нормальных нагрузок
• *к увеличению угловой скорости
• к постоянной угловой скорости
• к уменьшению угловой скорости
36. Какие способы регулирования угловой скорости двигателя постоянного тока существуют?
• *изменением тока возбуждения двигателя, изменением сопротивления цепи якоря посредством резисторов, изменением подводимого к якорю двигателя напряжения
• изменением момента нагрузки двигателя, изменением сопротивления цепи якоря посредством резисторов, изменением подводимого к якорю двигателя напряжения
• изменением тока возбуждения двигателя, изменением сопротивления цепи якоря посредством резисторов, изменением момента нагрузки двигателя
37. Обычно регулируемые двигатели имеют диапазон регулирования
• от 2:1 до 4:1
• *от 2:1 до 5:1
• от 2:1 до 6:1
38. Скважность управляющих импульсов выражается по формуле
• *
•
•
39. Для двигателя постоянного тока потребляемая мощность в цепи якоря определяется равенством
•
• *
•
40. У двигателя постоянного тока независимого возбуждения допустимый момент без учета ухудшений условий вентиляции со снижением угловой скорости
• *остается постоянным
• увеличивается
• уменьшается
41. Плавность регулирования определяется
• плавностью изменения угловой скорости
• *плавностью изменения напряжения питания
• плавностью изменения сопротивления
42. Диапазон регулирования угловой скорости двигателя постоянного тока независимого возбуждения определяется по формуле
•
•
• *
43. Выберите правильное утверждение
• * потери мощности в якорной цепи при постоянном моменте нагрузки остаются неизменными при регулировании угловой скорости и равными потерям при работе на естественной характеристике
• потери мощности в якорной цепи при постоянном моменте нагрузки увеличиваются при регулировании угловой скорости и остаются равными потерям при работе на естественной характеристике
• потери мощности в якорной цепи при постоянном моменте нагрузки уменьшаются при регулировании угловой скорости и остаются равными потерям при работе на естественной характеристике
44. Уравнение равновесия ЭДС для двигателя постоянного тока независимого возбуждения по системе Г-Д имеет вид
• Eг-E=I(Rг-Rд)
• I(Eг-E)=Rг-Rд
• *Eг-E=I(Rг+Rд)
45. Уравнение угловой скорости двигателя постоянного тока независимого возбуждения по системе Г-Д имеет вид
• *
•
•
46. Скорость идеального холостого хода двигателя постоянного тока независимого возбуждения по системе Г-Д имеет вид
•
•
• *
47. Механические характеристики двигателя постоянного тока независимого возбуждения при неизменном потоке двигателя и изменении потока генератора (без учета реакции якоря) представляют собой семейство линейных характеристик, наклон которых
• *остается постоянным и определяется общим сопротивлением якорной цепи
• увеличивается и определяется общим сопротивлением якорной цепи
• уменьшается и определяется общим сопротивлением якорной цепи
48. Характеристика какого двигателя изображена на рисунке
• двигателя переменного тока независимого возбуждения
• двигателя переменного тока постоянного возбуждения
• *двигателя постоянно тока независимого возбуждения
49. Схема какого двигателя изображена на рисунке
• *схема включения двигателя постоянного тока независимого возбуждения при динамическом торможении
• схема включения двигателя переменного тока смешанного возбуждения при динамическом торможении
• схема включения двигателя переменного тока независимого возбуждения при динамическом торможении
50. Что можно вычислить по данной формуле
• *уравнение механической характеристики двигателя постоянного тока независимого возбуждения
• уравнение механической характеристики двигателя переменного тока смешанного возбуждения
• уравнение механической характеристики двигателя переменного тока независимого возбуждения
51. В двигателе постоянного тока независимого возбуждения при шунтировании якоря используются два способа регулирования угловой скорости двигателя
• *изменением подводимого к якорю напряжения и реостатное
• изменением тока возбуждения двигателя и реостатное
• изменением подводимого к якорю напряжения и изменением тока возбуждения двигателя
52. Какой из способов регулирования угловой скорости двигателя является одним из наиболее простых и экономичных способов?
• реостатное
• изменением подводимого к якорю двигателя напряжения
• *изменением тока возбуждения
53. Потери мощности в цепи якоря при работе на регулировочных характеристиках будут такими же, как и на естественной характеристике, а потери на возбуждение
• *меньше
• больше
• останутся неизменными
54. При каком способе регулирования изменяется жесткость, а с ней и стабильность угловой скорости
• *реостатном
• изменением подводимого к якорю двигателя напряжения
• изменением тока возбуждения
55. Какое регулирование угловой скорости производится с помощью контакторов, замыкающих отдельные ступени резисторов
• *реостатное
• изменением подводимого к якорю двигателя напряжения
• изменением тока возбуждения
56. При каком способе не обеспечивается плавного регулирования
• при регулировании с применением жидкостного реостата
• при регулировании с применением ползункового реостата
• *при регулировании с помощью контакторов
57. С увеличением скважности управляющих импульсов при неизменной нагрузке на валу двигателя угловая скорость его
• уменьшается
• *возрастает
• остается неизменной
58. КПД привода при реостатном регулировании и вентиляторном моменте может быть определен по формуле
• *
•
•
59. Выберите правильное утверждение
• *допустимый момент без учета ухудшений условий вентиляции со снижением угловой скорости остается постоянным, так как допустимый ток якоря равен номинальному, а поток при независимом возбуждении остается неизменным
• допустимый момент без учета ухудшений условий вентиляции со снижением угловой скорости увеличивается, так как допустимый ток якоря равен номинальному, а поток при независимом возбуждении остается неизменным
• допустимый момент без учета ухудшений условий вентиляции со снижением угловой скорости уменьшается, так как допустимый ток якоря равен номинальному, а поток при независимом возбуждении остается неизменным
60. Генератор двигателя постоянного тока с независимым возбуждением по системе Г-Д приводится во вращение
• только асинхронным двигателем
• только синхронным двигателем
• *асинхронным или синхронным двигателем
61. Питание цепей возбуждения генератора и исполнительного двигателя осуществляется от независимого источника
• постоянного тока с независимым возбуждением
• переменного тока
• *постоянного тока
62. Из-за индуктивности рассеяния вторичной обмотки трансформатора переход тока от одного тиристора к другому
• не происходит
• происходит мгновенно
• *происходит в течение времени
63. Среднее значение выпрямленного напряжения определяется соотношением (без учета падения напряжения на тиристоре)
• *
•
•
64. Что обозначает в формуле
• индуктивное сопротивление рассеяния обмоток фазы
• *активное сопротивление сглаживающего реактора
• индуктивное сопротивление сглаживающего якоря
65. При каких значениях момента двигателя и момента сопротивления происходит ускорение привода
• *M>Mc
• M • M=Mc
66. При каких значениях момента двигателя и момента сопротивления происходит замедление привода
• M>Mc
• *M • M=Mc
67. При каких значениях момента двигателя и момента сопротивления привод находится в установившемся режиме
• M>Mc
• M • *M=Mc
68. Изменение направления вращения двигателя в реверсивном приводе возможно за счет изменения направления тока
• *в цепи возбуждения двигателя постоянного тока независимого возбуждения
• в цепи возбуждения двигателя переменного тока смешанного возбуждения
• в цепи возбуждения двигателя переменного тока независимого возбуждения
69. Коэффициент полезного действия тиристорного выпрямителя определяется
• *произведением КПД трансформатора и КПД вентилей
• зависимостью КПД трансформатора от КПД вентилей
• зависимостью КПД вентилей от КПД трансформатора
70. Коэффициент мощности тиристорного выпрямителя определяется по формуле
•
• *
•
71. С увеличением угла включения тиристоров коэффициент мощности
• резко увеличивается
• *резко падает
• не изменяется
72. При широтно-импульсном регулировании напряжения период коммутации (частота)
• *остается неизменным
• увеличивается с изменением времени замкнутого состояния ключа
• уменьшается с изменением времени замкнутого состояния ключа
73. Среднее значение напряжения на якоре при широтно-импульсном регулировании равно
•
• *
•
74. Уравнение механической характеристики двигателя для средних значений угловой скорости и момента имеет вид
• *
•
•
75. Основным средством сужения зоны прерывистых токов, уменьшения пульсаций тока якоря и угловой скорости относительно среднего значения и, следовательно, дополнительных потерь в обмотках якоря является
• *увеличение частоты коммутации ключа
• неизменное значение частоты коммутации ключа
• уменьшение частоты коммутации ключа
76. Что является достоинством широтно-импульсного регулирования
• угловую скорость нельзя регулировать, и жесткость механических характеристик при этом равна жесткости естественной характеристики.
• *угловую скорость можно регулировать в широких пределах, изменяя , а жесткость механических характеристик при регулировании угловой скорости постоянна и равна жесткости естественной характеристики
• угловую скорость нельзя регулировать, при этом жесткость механических характеристик можно регулировать в широких пределах
77. Уравнение электромеханической характеристики двигателя при шунтировании якоря имеет вид
•
•
• *
78. Уравнение механической характеристики двигателя при шунтировании якоря имеет вид
•
• *
•
79. При шунтировании обмотки якоря двигателя постоянного тока независимого возбуждения используются два способа регулирования
• *изменением подводимого к якорю напряжения и реостатное
• реостатное и изменением тока возбуждения
• изменением тока возбуждения и изменением подводимого к якорю напряжения
80. Какой из способов регулирования не используется при шунтировании обмотки якоря двигателя постоянного тока независимого возбуждения
• реостатное
• изменением подводимого к якорю напряжения
• изменением тока возбуждения
81. Выберите правильное соотношение
• *
•
•
82. Схема шунтирования какого двигателя изображена на рисунке
• двигателя переменного тока независимого возбуждения
• двигателя переменного тока смешанного возбуждения
• *двигателя постоянного тока независимого возбуждения
83. Чем объясняется снижение угловой скорости идеального холостого хода
• *при отсутствии тока в цепи якоря приложенное к якорю напряжение будет меньше напряжения сети в последовательном сопротивлении
• при отсутствии тока в цепи якоря приложенное к якорю напряжение будет равно напряжению сети в последовательном сопротивлении
• при отсутствии тока в цепи якоря приложенное к якорю напряжение будет больше напряжения сети в последовательном сопротивлении
84. Жесткость механической характеристики и угловая скорость идеального холостого хода зависят
• от соотношения сопротивлений последовательного и шунтирующего резисторов
• только от сопротивления последовательного резистора
• только от сопротивления шунтирующего резистора
85. Уравнение для угловой скорости в точке А для двигателя постоянного тока независимого возбуждения при шунтировании якоря имеет вид
•
•
• *
86. При каком значении двигатель не получает питания от сети и работает в режиме динамического торможения на внешний резистор
• * =
• =0
• =1
87. При каком значении напряжение, подводимое к якорю, не зависит от сопротивления шунтирующего резистора и остается неизменным при изменении тока якоря
• =
• * =0
• =1
88. Крутизна характеристики двигателя постоянного тока независимого возбуждения при неизменном сопротивлении шунтирующего резистора зависит
• *только от сопротивлений шунтирующего резистора
• не зависит от сопротивлений шунтирующего резистора
• зависит от многих факторов
89. При каком значении угловой скорости ток не проходит через шунтирующий резистор
• равное нулю
• больше нуля
• *меньше нуля
90. Какой способ регулирования применяется для того, чтобы расширить пределы регулирования за счет увеличения угловой скорости выше основной при загрузке двигателя номинальным током
• изменением сопротивления резисторов в цепи якоря
• *изменением тока возбуждения
• изменением подводимого напряжения
91. Диапазон регулирования угловой скорости изменением сопротивления резисторов в цепи якоря не превышает
• *(2-2.5):1
• (3-3.5):1
• (4-4.5):1
92. Какой из видов регулирования зависит от нагрузки
• *изменением сопротивления резисторов в цепи якоря
• изменением тока возбуждения
• изменением подводимого напряжения
93. Какой способ регулирования находит применение в крановых и тяговых установках, поскольку он является одним из простейших для двигателей последовательного возбуждения
• *изменением сопротивления резисторов в цепи якоря
• изменением тока возбуждения
• изменением подводимого напряжения
94. Какое регулирование может быть осуществлено с помощью отдельного генератора, тиристорного преобразователя либо последовательно-параллельным включением двигателей
• изменением сопротивления резисторов в цепи якоря
• изменением тока возбуждения
• *изменением подводимого напряжения
95. При каком включении двигателей можно получить две ступени угловой скорости благодаря изменению напряжения, подводимого к каждому из двигателей
• при последовательном включении
• при параллельном включении
• *при последовательно-параллельном включении
96. Какой способ регулирования применяют в случае, когда один производственный механизм приводится одновременно двумя двигателями половинной мощности
• изменением сопротивления резисторов в цепи якоря
• изменением тока возбуждения
• *изменением подводимого напряжения
97. Сколько двигателей применяют при необходимости сократить время пуска и торможения
• 1
• *2
• 3
98. Применение какого включения дает наиболее экономические выгоды
• *последовательно-параллельное
• последовательное
• параллельное
99. Какое условие соответствует работе двигателя независимого возбуждения в режиме динамического торможения без внешнего резистора
• *Rш=0
• Rш>0
• Rш 100. При каком условии Rш характеристика двигателя становится такой, как и для обычного включения в цепь якоря последовательного резистора с сопротивлением и жесткость ее уменьшается
• Rш=0
• *Rш=
• Rш=1