12.Схема включения и механическая характеристика дпт нв при пуске.
Для построения достаточно двух точек: одна соответствует начальному электромагнитному моменту двигателя и номинальной скорости (M=Mном и ), а другая – скорости идеального холостого хода (M=0 и ).
RЯ определяют ориентировочно, принимая, что половина всех потерь в двигателе при номинальной нагрузке связана с потерями в меди якоря:
Угловая скорость реостатной характеристики с RР:
Рис.9. Схема включения двигателя постоянного тока независимого
возбуждения при пуске
Рис.10. Механическая характеристика при пуске
13.Механические характеристики дпт нв в тормозных режимах.
Рис.11. Механические характеристики ДПТ НВ в тормозных режимах
Существует три возможных способа генераторного электрического торможения:
- Торможение с отдачей энергии в сеть (генераторный режим работы параллельно с сетью) осуществляется в том случае, когда скорость двигателя оказывается выше скорости идеального холостого хода и его ЭДС Е больше приложенного напряжения U. Ток при этом изменяет своё направление:
следовательно, изменяет знак и момент двигателя, то есть он становится тормозным
Если обозначить MT=-M, то уравнение (***) при примет вид:
Этот способ торможения возможен, например, в приводах транспортных и подъёмных механизмов при спуске груза и при некоторых способах регулирования, когда двигатель, переходя к низшим скоростям, проходит значение .
2.Динамическое торможение происходит при отключении якоря двигателя от сети и замыкании его на резистор, то есть реостатное торможение. Обмотка возбуждения при этом должна оставаться присоединённой к сети. Ток якоря . Тормозной момент при динамическом торможении, если пренебречь реакцией якоря:
Рис.12. Схема включения ДПТ НВ при динамическом торможении
При Ф=const -механическая характеристика динамического торможения находится во II-м квадранте (см. рис.).
Динамическое торможение используется для останова привода при отключении его от сети, при спуске грузов в подъёмных механизмах.
3.Торможение противовключением (генераторный режим работы последовательно с сетью) осуществляется в том случае, когда обмотки двигателя включены для одного направления вращения, а якорь двигателя под воздействием внешнего момента или сил инерции вращается в противоположную сторону. Такой режим получается при переключении обмотки якоря (или обмотки возбуждения) двигателя для быстрой остановки или для изменения направления вращения на противоположное.
При изменении полярности напряжения, подводимого к якорю необходимо включать дополнительный резистор в якорную цепь для ограничения тока и момента.
Рис.14. Механическая характеристика при торможении противовключением.
В точке А изменяется полярность напряжения и осуществляется переход в т.В. ( в силу механической инерционности привода). Далее происходит уменьшение ω по линии BC до останова в точку C (отключение от сети). Если отключения не произойдёт, ω начнёт увеличиваться в другую сторону по линии CD, а затем перейдёт на работу на естественную характеристику FE. Если ещё раз изменить полярность напряжения на выводах якоря –происходит по линии FGKL.
32. Основные схемы включения дпт. Независимое возбуждение
Обмотка возбуждения подключается к независимому источнику. Характеристики двигателя получаются такие же, как у двигателя с постоянными магнитами. Скорость вращения регулируется сопротивлением в цепи якоря. Регулируют ее и реостатом (регулировочным сопротивлением) в цепи обмотки возбуждения, но при чрезмерном уменьшении его величины или при обрыве ток якоря возрастает до опасных значений. Двигатели с независимым возбуждением нельзя запускать на холостом ходу или с малой нагрузкой на валу. Скорость вращения резко увеличится, и двигатель будет поврежден.
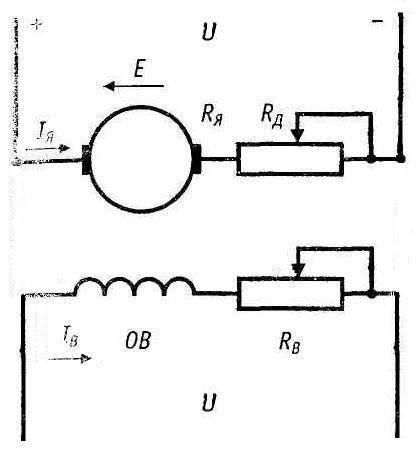
Схема независимого возбуждения
Остальные схемы называют схемами с самовозбуждением.
Параллельное возбуждение
Обмотки ротора и возбуждения подключаются параллельно к одному источнику питания. При таком включении ток через обмотку возбуждения в несколько раз меньше, чем через ротор. Характеристики электродвигателей получаются жесткими, позволяющие использовать их для привода станков, вентиляторов.
Регулировка скорости вращения обеспечивается включением реостатов в цепь ротора или последовательно с обмоткой возбуждения.
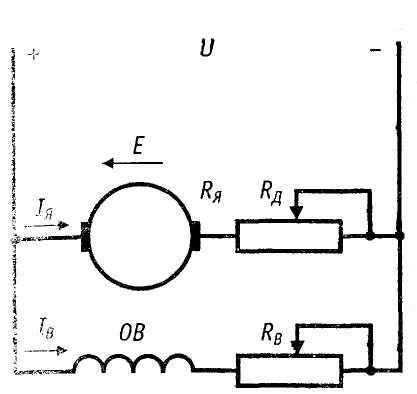
Схема параллельного возбуждения
Последовательное возбуждение
Обмотка возбуждения включается последовательно с якорной, по ним течет один и тот же ток. Скорость такого двигателя зависит от его нагрузки, его нельзя включать на холостом ходу. Но он обладает хорошими пусковыми характеристиками, поэтому схема с последовательным возбуждением применяется на электрифицированном транспорте.
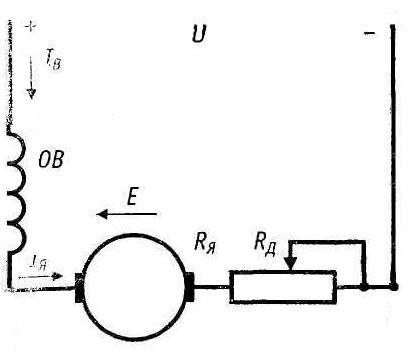
Схема последовательного возбуждения
Смешанное возбуждение
При этой схеме используются две обмотки возбуждения, расположенные попарно на каждом из полюсов электродвигателя. Их можно подключить так, чтобы потоки их либо складывались, либо вычитались. В результате двигатель может иметь характеристики как у схемы последовательного или параллельного возбуждения.
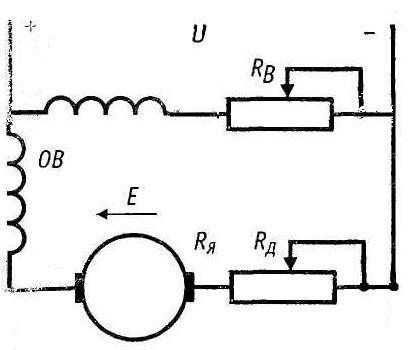
Схема смешанного возбуждения
Для изменения направления вращения изменяют полярность одной из обмоток возбуждения. Для управления пуском электродвигателя и скоростью его вращения применяют ступенчатое переключение сопротивлений
33. Характеристика дпт с независимым возбуждением.
Двигатель постоянного тока независимого возбуждения (ДПТ НВ) В этом двигателе (рисунок 1) обмотка возбуждения подключена к отдельному источнику питания. В цепь обмотки возбуждения включен регулировочный реостат rрег, а в цепь якоря — добавочный (пусковой) реостат Rп. Характерная особенность ДПТ НВ — его ток возбуждения Iв не зависит от тока якоря Iя так как питание обмотки возбуждения независимое.
Схема двигателя постоянного тока независимого возбуждения (ДПТ НВ)
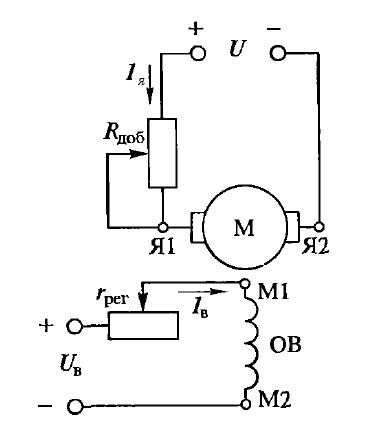
Рисунок 1
Механическая характеристика двигателя постоянного тока независимого возбуждения (дпт нв)
Уравнение механической характеристики двигателя постоянного тока независимого возбуждения имеет вид
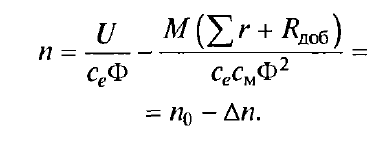
где: n0 — частота вращения вала двигателя при холостом ходе. Δn — изменение частоты вращения двигателя под действием механической нагрузки.
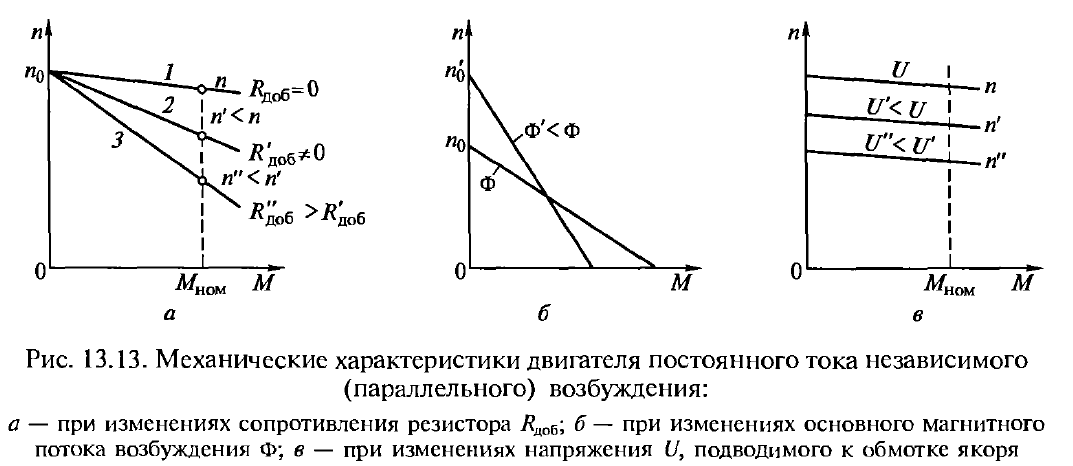
Из этого уравнения следует, что механические характеристики двигателя постоянного тока независимого возбуждения (ДПТ НВ) прямолинейны и пересекают ось ординат в точке холостого хода n0 (рис 13.13 а), при этом изменение частоты вращения двигателя Δn, обусловленное изменением его механической нагрузки, пропорционально сопротивлению цепи якоря Rа =∑R + Rдоб. Поэтому при наименьшем сопротивлении цепи якоря Rа = ∑R, когда Rдоб = 0, соответствует наименьший перепад частоты вращения Δn. При этом механическая характеристика становится жесткой (график 1).
Механические характеристики двигателя, полученные при номинальных значениях напряжения на обмотках якоря и возбуждения и при отсутствии добавочных сопротивлений в цепи якоря, называют естественными (график 7).
Если же хотя бы один из перечисленных параметров двигателя изменен (напряжение на обмотках якоря или возбуждения отличаются от номинальных значений, или же изменено сопротивление в цепи якоря введением Rдоб), то механические характеристики называют искусственными.
Искусственные механические характеристики, полученные введением в цепь якоря добавочного сопротивления Rдоб, называют также реостатными (графики 7, 2 и 3).
При оценке регулировочных свойств двигателей постоянного тока наибольшее значение имеют механические характеристики n = f(M). При неизменном моменте нагрузки на валу двигателя с увеличением сопротивления резистора Rдоб частота вращения уменьшается. Сопротивления резистора Rдоб для получения искусственной механической характеристики, соответствующей требуемой частоте вращения n при заданной нагрузке (обычно номинальной) для двигателей независимого возбуждения:
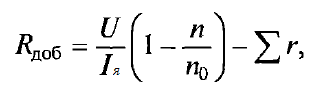
где U — напряжение питания цепи якоря двигателя, В; Iя — ток якоря, соответствующий заданной нагрузке двигателя, А; n — требуемая частота вращения, об/мин; n0 — частота вращения холостого хода, об/мин.
Частота вращения холостого хода n0 представляет собой пограничную частоту вращения, при превышении которой двигатель переходит в генераторный режим. Эта частота вращения превышает номинальную nном на столько, на сколько номинальное напряжение Uном подводимое к цепи якоря, превышает ЭДС якоря Ея ном при номинальной нагрузки двигателя.

На форму механических характеристик двигателя влияет величина основного магнитного потока возбуждения Ф. При уменьшении Ф (при возрастании сопротивления резистора rpeг) увеличивается частота вращения холостого хода двигателя n0 и перепад частоты вращения Δn. Это приводит к значительному изменению жесткости механической характеристики двигателя (рис. 13.13, б). Если же изменять напряжение на обмотке якоря U (при неизменных Rдоб и Rрег), то меняется n0, a Δn остается неизменным [см. (13.10)]. В итоге механические характеристики смещаются вдоль оси ординат, оставаясь параллельными друг другу (рис. 13.13, в). Это создает наиболее благоприятные условия при регулировании частоты вращения двигателей путем изменения напряжения U, подводимого к цепи якоря. Такой метод регулирования частоты вращения получил наибольшее распространение еще и благодаря разработке и широкому применению регулируемых тиристорных преобразователей напряжения.
Устройство и принцип работы двигателя постоянного тока
В повседневной жизни нас окружает множество электроприборов. Основным элементом некоторых из них является двигатель. В одной из наших статей мы уже рассказывали о том, как устроен и работает двигатель переменного тока. Сегодня в нашей статье мы рассмотрим устройство и принцип действия двигателя постоянного тока.
Устройство (схема) двигателя постоянного тока
Конструкция электродвигателя постоянного тока состоит из следующих элементов:
1. вал электродвигателя, на который устанавливаются остальные детали.
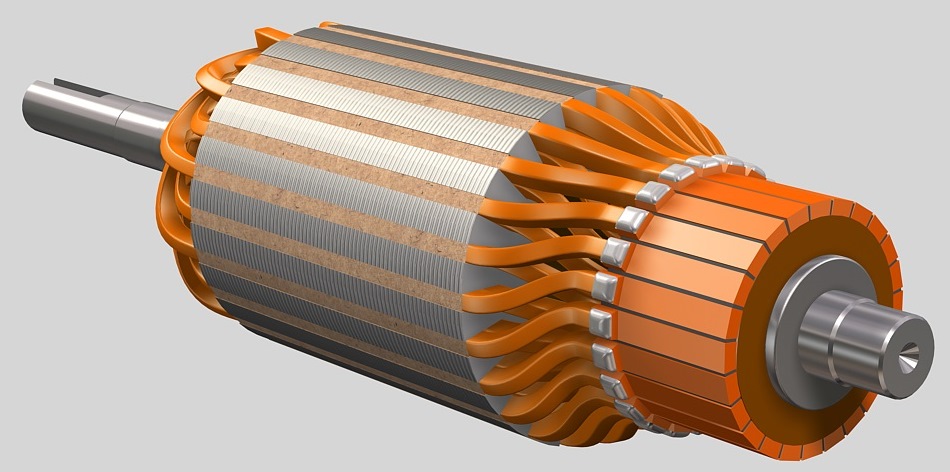
2. якорь (ротор) двигателя, который включает в себя:
2.1. сердечник якоря, представленный в виде набора пластин из специальной электротехнической стали;
2.2. якорная обмотка;
2.3. коллектор;
2.4. главный полюс, представляющий собой набор пластин из электротехнической стали. Для двигателей малых размеров полюсы изготавливаются из постоянных магнитов;
2.5. обмотка возбуждения;
2.6. монолитные добавочные полюса (в двигателях малых размеров не применяются) предназначены для улучшения коммутации и располагаются между главными полюсами;
2.7. обмотка из эмалированных проводов добавочного полюса;
.jpg)
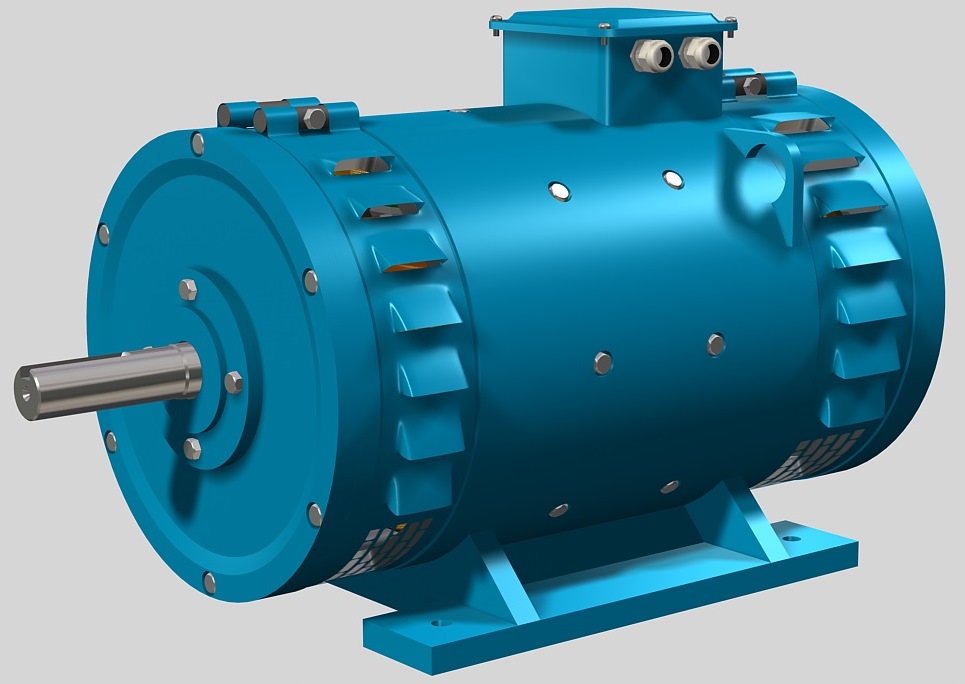
3. корпус электродвигателя, который чаще всего выполняется из чугуна, так как данный материал обеспечивает возможность эксплуатации электродвигателя в местах с агрессивной средой и обладает высоким уровнем устойчивости к износам. Также для улучшения корпус двигателя может изготавливаться со специальными ребрами, которые обеспечивают термический баланс электродвигателя. Полюсы, образующие индуктор, а также якорь, устанавливаются в корпус двигателя.
4. клеммная коробка. Концы обмоток полюсов двигателя выводятся в клеммную коробку, в которой установлены клеммы с подключенными концами обмоток индуктора и клеммы для подключения щеток якоря. Также предусмотрено одно-два отверстия для установки сальников, через которые заводятся силовые кабели для подключения питания. В машинах малой мощности выводы обмоток размещаются в клеммной коробке, при этом один из зажимов добавочных полюсов и один из зажимов якоря (щеточная траверса) соединены наглухо внутри машины, а в клеммную коробку выведены другие зажимы якоря и добавочных полюсов. В крупных машинах с высоким номинальным током клеммная коробка отсутствует, а выводные концы размещаются в нижней части станины машины. При этом выводные концы параллельной цепи выполняются в виде жил кабелей с наконечниками, последовательной — в виде шин.
Также в конструкции присутствуют такие элементы:
• передний и задний подшипниковые щиты, а также внутренние подшипниковые крышки, которые прикручиваются к подшипниковым щитам;
• щеточный узел, который состоит из кронштейна, щеткодержателей и щеток (графитовых или металло-графитовых). Данный узел крепится на выпуклой части подшипниковой крышки заднего подшипникового щита. Он предназначен для подвода «питания» к катушкам на вращающемся роторе и переключения тока в обмотках якоря;
• вентилятор охлаждения, обеспечивающий поддержание низкой рабочей температуры;
• подшипниковые щиты;
• подшипники;
• наружные подшипниковые крышки, закрывающие подшипники;
• проушины или рым-болты, которые упрощают погрузочно-разгрузочные работы и монтаж двигателя;
• лапы, которые обеспечивают низкий уровень вибрации электродвигателя во время работы;
• защитный кожух вентилятора и кожух выхода воздуха обдува;
• шильдик, на котором указывается основные характеристики двигателя.
Способы подключения электродвигателя постоянного тока
Двигатели постоянного тока производятся зачастую с параллельным, последовательным и независимым типом возбуждения. В зависимости от типа возбуждения маркировка контактов в клеммной коробке различается. Исходя из вида возбуждения, выполняется различное подключение питающего кабеля.
Для начала рассмотрим подключение кабеля к клеммам электродвигателя с независимым возбуждением обмоток.
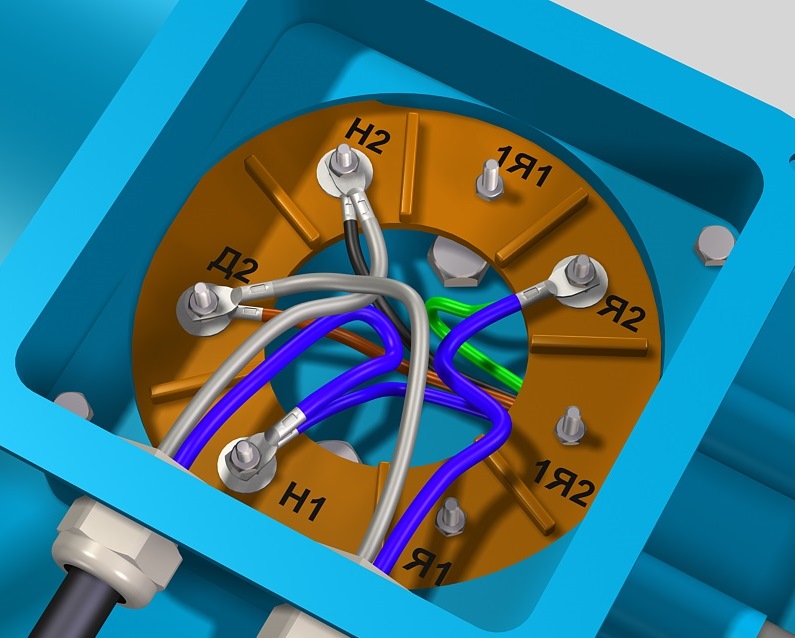
В кабельный ввод заводим два двухжильных кабеля с жилами серого и синего цветов. Выполняем зачистку кабеля и жил, после чего надеваем на них кабельные наконечники.
После оконцевания производим подключение жил согласно схеме на внутренней стороне крышки клеммной коробки. Для данного подключения используем схему для двигателей с независимым возбуждением, когда напряжение на обмотки возбуждения и якорь двигателя подаются от независимых источников.
Двигатель постоянного тока с параллельным возбуждением – схема работы
Двигатель постоянного тока с параллельным возбуждением – это электродвигатель, у которого обмотки якоря и возбуждения подключаются друг к другу параллельно. Часто по своей функциональности он превосходит агрегаты смешанного и последовательного типов в случаях, если необходимо задать постоянную скорость работы.
Характеристики двигателя постоянного тока с параллельным возбуждением
Формула общего тока, идущего от источника, выводится согласно первому закону Кирхгофа и имеет вид: I = Iя + Iв, где Iя — ток якоря, Iв – ток возбуждения, а I – ток, который двигатель потребляет от сети. Следует отметить, что при этом Iв не зависит от Iя, т.е. ток возбуждения не зависит от нагрузки. Величина тока в обмотке возбуждения меньше тока якоря и составляет примерно 2-5% от сетевого тока.
В целом, данные электродвигатели отличаются следующими весьма полезными тяговыми параметрами:
- Высокая экономичность (поскольку ток якоря не проходит через обмотку возбуждения).
- Устойчивость и непрерывность рабочего цикла при колебаниях нагрузки в широких пределах (т.к. величина момента сохраняется даже в случае изменения числа оборотов вала).
При недостаточном моменте пуск осуществляется посредством перехода на смешанный тип возбуждения.
Сферы применения двигателя
Поскольку частота вращения подобных двигателей остается почти постоянной даже при изменении нагрузки, а также может изменяться при помощи регулировочного реостата, они широко применяются в работе с:
- вентиляторами;
- насосами;
- шахтными подъемниками;
- подвесными электрическими дорогами;
- станками (токарными, металлорежущими, ткацкими, печатными, листоправильными и пр.).
Таким образом, этот вид двигателей в основном используется с механизмами, требующими постоянства скорости вращения или ее широкой регулировки.
Регулирование частоты вращения
Регулирование скорости – это целенаправленное изменение скорости электродвигателя в принудительном порядке при помощи специальных устройств или приспособлений. Оно позволяет обеспечить оптимальный режим работы механизма, его рациональное использование, а также уменьшить расход энергии.
Существует три основных способа регулирования скорости двигателя:
- Изменение магнитного потока главных полюсов. Осуществляется при помощи регулировочного реостата: при увеличении его сопротивления магнитный поток главных полюсов и ток возбуждения Iв уменьшаются. При этом увеличивается число оборотов якоря на холостом ходу, а также угол наклона механической характеристики. Жесткость механических характеристик сохраняется. Однако увеличение скорости может привести к механическим повреждениям агрегата и к ухудшению коммутации, поэтому не рекомендуется увеличивать частоту вращения этим методом более чем в два раза.
- Изменение сопротивления цепи якоря. К якорю последовательно подключается регулировочный реостат. Скорость вращения якоря уменьшается при увеличении сопротивления реостата, а наклон механических характеристик увеличивается. Регулировка скорости вышеуказанным способом:
- способствует уменьшению частоты вращения относительно естественной характеристики;
- связана с большой величиной потерь в регулировочном реостате, следовательно, неэкономична.
- Безреостатное изменение подаваемого на якорь напряжения. В этом случае необходимо наличие отдельного источника питания с регулируемым напряжением, например, генератора или управляемого вентиля.
Двигатель с независимым возбуждением
Двигатель постоянного тока независимого возбуждения как раз и реализует третий принцип регулирования скорости. Его отличие в том, что обмотка возбуждения и магнитное поле главных полюсов подключаются к разным источникам. Ток возбуждения является неизменной характеристикой, а магнитное поле меняется. При этом изменяется число оборотов вала на холостом ходу, жесткость характеристики остается прежней.
Таким образом, принцип работы дпт с независимым возбуждением является достаточно сложным вследствие независимой работы двух источников, тем не менее, его главное преимущество – большая экономичность.