Постоянная составляющая в сигнале переменного тока
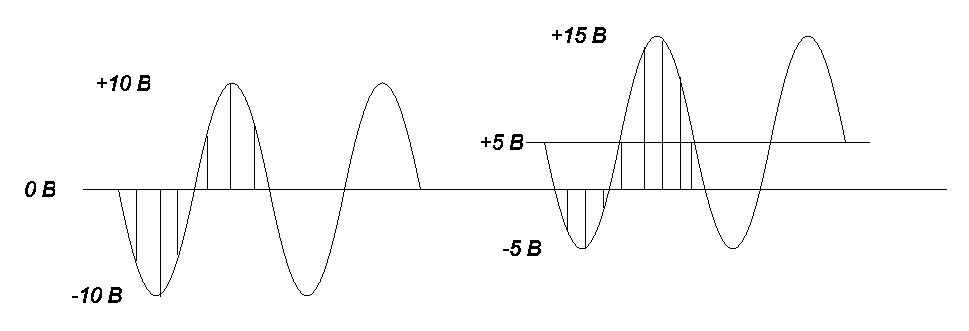
Рассмотрим два синусоидальных сигнала, изображенных на рис. 2.8. Левый сигнал не имеет постоянной составляющей, так как его положительный пик равен отрицательному. Правый же сигнал содержит составляющую постоянного тока величиной 5 В.
Постоянная составляющая переменного тока называется также средним, или усредненным, значением сигнала переменного тока. Определим постоянную составляющую сигнала, имеющего прямоугольную форму (Рис.2.9):
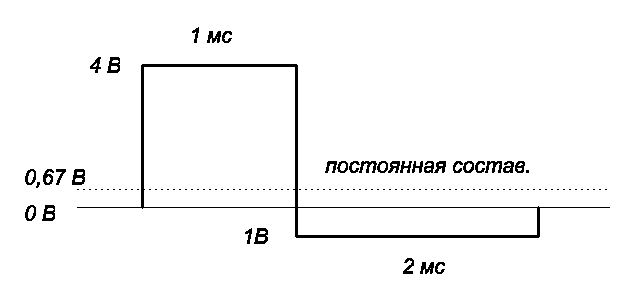
- определим положение нулевого уровня;
- вычислим площадь лежащую выше нулевого уровня
- вычислим площадь лежащую ниже нулевого уровня
- вычислим суммарную площадь
- вычислим среднее значение напряжения за период равно
Среднеквадратическое значение (действующее) переменного тока
Постоянный ток имеет постоянное значение, и это значение можно использовать во всех вычислениях. Значение же переменного тока изменяется во времени. Чтобы преодолеть эту трудность, за «постоянное» значение переменного тока приняли и используют его среднеквадратическое значение. Среднеквадратическое значение переменного тока является эквивалентом значения постоянного тока, при котором вырабатывается такая же мощность, что и при исходном значении переменного тока. Если известно среднеквадратическое значение переменного тока, то его можно использовать для вычисления мощности так же, как если бы это было постоянное напряжение или ток.
- мощность пост, тока = Постоянный ток х Постоянное напряжение;
- мощность переменного, тока = Среднеквадратическое значение тока х
х среднеквадратическое значение напряжения.
Значения переменного тока и напряжения всегда задают в виде среднеквадратической величины, за исключением специально оговоренных случаев.
Какое сопротивление имеет электрический обогреватель мощностью 1 кВт?
Домашние обогреватели работают от сетевого напряжения, имеющего среднеквадратическое значение 220 В. Мощность, потребляемая обогревателем, составляет 1 кВт = 1000 Вт. Из формулы
R = U2/P = 240 2 /1000 = 57,6 Ом.
Соотношение между пиковыми и среднеквадратическими значениями
Действующее значение тока Iд – это среднеквадратичное значение за период переменного тока.
где Т период частоты сигнала.
Действующее значение переменного тока выбрано в качестве главной характеристики на том основании, что действие электрического тока в ряде случаев пропорционально квадрату тока или напряжения, например, тепловое действие, механическое взаимодействие прямого и обратного провода, взаимодействие заряженных пластин и т.д. Для косинусоидального тока квадрат площади за период равен,
Среднеквадратическое значениями значение косинусоидального тока равно,
Среднеквадратическое значение сигнала переменного тока зависит от его формы. Так, среднеквадратическое значение синусоидального сигнала составляет 0,707 его пикового значения (амплитуды). Это справедливо только для синусоидального сигнала. Например, если амплитуда синусоидального сигнала U= = 10 В, то его среднеквадратическое значение составит Iср.кв = 0,707 × Um = 0,707 × 10 = 7,07 В Из соотношения Ucp.KB. = 0,707 × Um, Um = 1/0,707 = 1,414 Ucp.KB
Термин: Постоянная составляющая сигнала
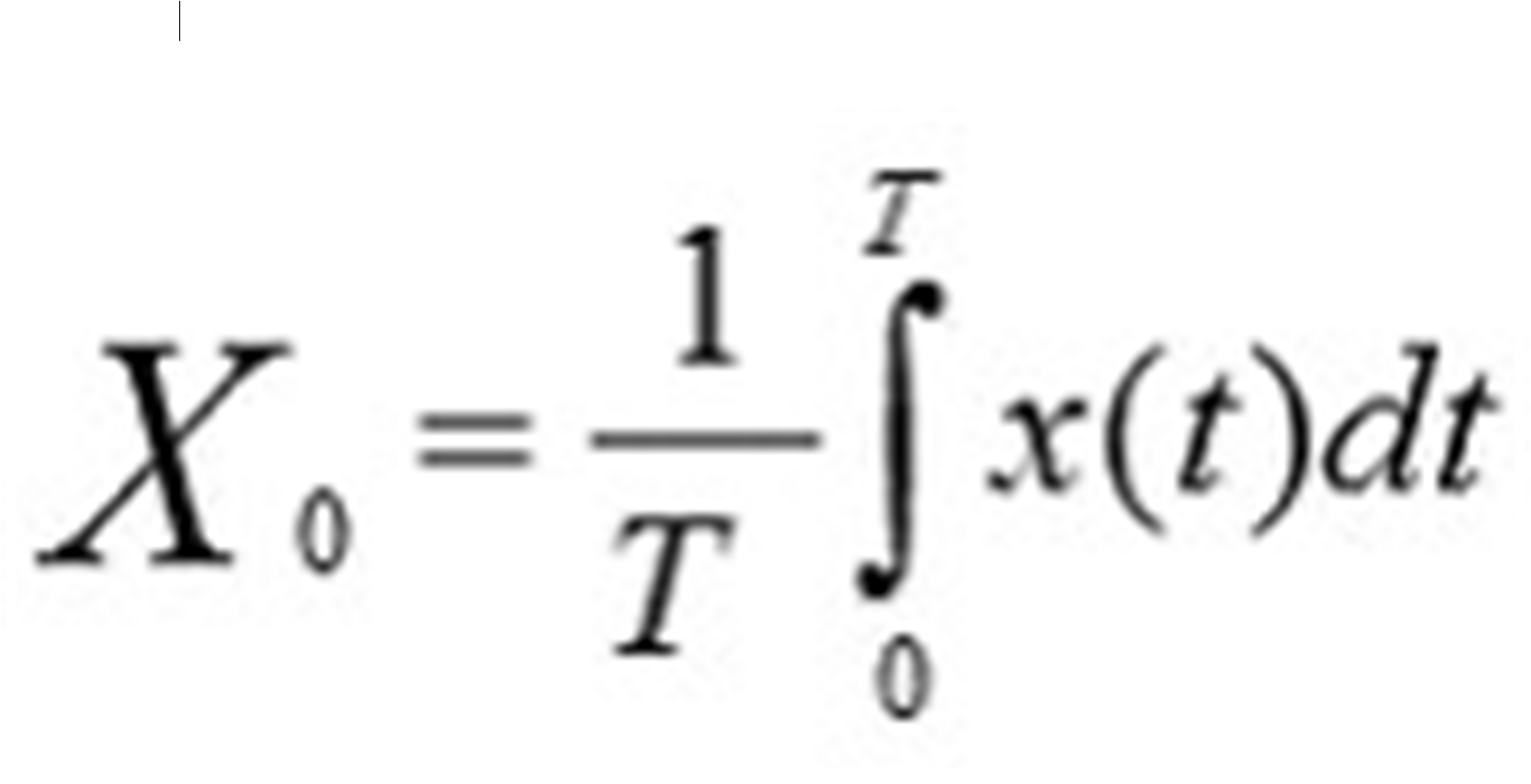
где интервал времени T стремится к бесконечности. При практической интерпретации этого понятия в задачах обработки сигнала интеграл берётся на скользящем интервале времени заданного размера (т.е. по выборке изучаемого участка сигнала). Постоянная составляющая сигнала, исходя из геометрического смысла интеграла, хорошо видна на графике сигнала во времени как величина, равная площади между осью нулевого значения сигнала и графиком (учитывая, что под осью площадь отрицательна, а над осью – положительна). На графике показано красной кривой значение постоянной составляющей X0 для скользящего окна интегрирования с размером, сравнимым с периодом сигнала.
Для цифрового сигнала оценка постоянной составляющей – это среднее арифметическое выборки из N отсчетов.
В спектральном представлении сигнала информацию о постоянной составляющей сигнала несёт нулевая гармоника спектра этого сигнала.
Размер выборки для вычисления постоянной составляющей зависит от условий задачи. Например, если сигнал имеет выраженные гармонические составляющие с известной частотой, то целесообразно, чтобы выборка включала целое число периодов этих составляющих (иначе на выходе будут пульсации). Если спектр сигнала не известен заранее, можно применить оконную функцию – например, окно Ханна:

Это позволяет уменьшить влияние нецелых периодов на концах выборки. Примеры оконных функций можно найти, например, здесь.
На практике, когда сигналы представлены напряжением или током, для обозначения режима измерения постоянного напряжения или тока, который по сути является режимами измерения постоянной составляющей этих сигналов, широко применяется термин DC (direct current).
Не во всех сигналах постоянная составляющая информационна. Для удаления постоянной составляющей из сигнала применяют фильтры высокой частоты.
Некоторые среды передачи сигнала не позволяют передавать постоянную составляющую сигнала (например, среды, имеющие емкостную или индуктивую гальваническую развязку), Для передачи постоянной составляющей сигнала через такие среды используют различные технические принципы, связанные со специальными способами модуляции и кодирования сигнала.
Постоянная составляющая может быть и не связана с сигналом, а порождаться самим прибором или преобразователем (из-за неидельности его характеристик) в виде смещения нуля.
| Перейти к другим терминам | Cтатья создана: | 27.07.2014 |
| О разделе «Терминология» | Последняя редакция: | 01.09.2017 |
Как выделить постоянную составляющую из ограниченного по амплитуде сигнала

Переменные составляющие имеют большую амплитуду, превышающую амплитуду измерителя. В результате они ограничены, что приводит к появлению паразитной постоянной составляющей. Есть ли методы фильтрации для устранения этого эффекта?
94731 / 64177 / 26122
Регистрация: 12.04.2006
Сообщений: 116,782
Ответы с готовыми решениями:
Выделить фазу из сдвоенного и зашумленного по амплитуде сигнала
Дано, по сути, только f1 и f2, остальное нужно для строительства графиков: Шум по амплитуде.
Можно ли линейными операциями из sin сигнала выделить составляющую?
Можно ли линейными операциями из сигнала sin(100t)+sin(300t) выделить составляющую с частотой 300.
Как синусоиде задать постоянную составляющую?
Как синусоиде задать постоянную составляющую? Чтоб синусоида полностью поднялась в положительный.
Возможно ли считывать инфо о амплитуде сигнала из wav файла?
все привет. собственно тема объявлена в другой ветке форума.
148 / 129 / 18
Регистрация: 29.04.2015
Сообщений: 626
![]() Сообщение от loou
Сообщение от loou 
Переменные составляющие имеют большую амплитуду, превышающую амплитуду измерителя.
А что, у измерителя есть амплитуда? 🙂
![]() Сообщение от loou
Сообщение от loou
В результате они ограничены, что приводит к появлению паразитной постоянной составляющей.
А никогда не появится постоянная составляющая, если ограничение симметричное!
Возьми сигнал sin(wt), ограничь амплитуду до 0.5 и посмотри что получится.
Вот если ограничение несимметричное, предположим в плюс 0.5 , а в минус 0.4 — только тогда появится постоянная составляющая.
Любой ФВЧ поможет избавиться от постоянной составляющей. Но лучше всё-таки следить за амплитудой сигнала, чтобы она не превышала максимально допустимой амплитуды измерителя. Иначе неизбежны существенные искажения спектра.
Регистрация: 02.08.2013
Сообщений: 32
Ограничение не симметричное т.к. кроме переменной есть постоянная составляющая. К sin добавим 0.5 и ограничим по уровню 0.5 — снизу вообще не срежется, а сверху половина уйдет.
По размышлениям, для одного синуса — можно восстановить (по периоду — частоту, по максимальной производной — амплитуду, по отношению срезанных сверху и снизу участков — действительную постоянную составляющую). Должно же это как-то обобщаться. Не могу ничего найти про обработку ограниченных по амплитуде сигналов.
148 / 129 / 18
Регистрация: 29.04.2015
Сообщений: 626
![]() Сообщение от loou
Сообщение от loou
Не могу ничего найти про обработку ограниченных по амплитуде сигналов.
Потому что в ЦОС такие сигналы, мягко говоря, не приветствуются 🙂
Можно вместо клиппирования попытаться применить обнуление.
А вообще нужно увеличивать динамический диапазон АЦП.
Можно перед АЦП поставить логарифмический усилитель.
Можно применить 2 АЦП (на один канал подавать сигнал с Ку=1, а на второй, к примеру, с Ку=0,1)
Можно применить МАРУ (масштабируемую АРУ), но это наиболее сложный вариант.
Регистрация: 24.09.2015
Сообщений: 342
loou, можно еще, например, посчитать среднее только для тех значений которые не подверглись искажениям. Так сказать убрать выбросы из измерений
Добавлено через 6 минут
Можно еще считать считать среднее, сдвиг нуля, только во время когда выбросов быть не может.
Превышение диапазона в принципе нормальный режим работы для многих систем, где принимаемый сигнал крайне мал на фоне шумов
Добавлено через 8 минут
Т.е. уходя в ограничения можно отфильтровать полезный сигнал, в то время как, если сделать сигнал в диапазоне АЦП, то полезный сигнал оказывается за приделом чувствительности
Регистрация: 02.08.2013
Сообщений: 32
К A_Santik: Это все ясно, и возможно будет сделано, но сейчас интересует возможность обработки такого сигнала. Казалось бы для одной гармоники и постоянного сигнала проблем нет => должно быть обобщение на произвольный спектр.
Вот и Papayaved пишет
Превышение диапазона в принципе нормальный режим работы для многих систем, где принимаемый сигнал крайне мал на фоне шумов
А литература по обработке таких сигналов? Или ключевые слова для поиска?
![]()
Сообщение от Papayaved
Можно еще считать считать среднее, сдвиг нуля, только во время когда выбросов быть не может.
— не вариант, нормальный режим работы, когда амплитуда гармоник в 10. 20 превышает ограничение приемника.
148 / 129 / 18
Регистрация: 29.04.2015
Сообщений: 626
Papayaved в принципе правильно говорит — можно определить постоянную составляющую ограниченного сигнала если считать среднее только для сигнала не имеющего ограничения.
Или, в моей интерпретации — заменить клиппирование обнулением 🙂
148 / 129 / 18
Регистрация: 29.04.2015
Сообщений: 626
Р.S. На картинках сигнал 5*sin(2*Pi*50*t)+0.5 c ограничением +-3
Регистрация: 24.09.2015
Сообщений: 342
нормальный режим работы, когда амплитуда гармоник в 10. 20 превышает ограничение приемника
Это фактически компаратор с гистерезисом. Если правильно выставить ноль, то можно было бы и фазу и частоты сигналов мерить.
Можно перед АЦП поставить конденсатор по входу.
Я правдо не вижу смысла в таком большом усиление. Здесь просто получается бинарный сигнал -1/+1.
87844 / 49110 / 22898
Регистрация: 17.06.2006
Сообщений: 92,604
Помогаю со студенческими работами здесь
Устройство которое воспроизводит только аудио-составляющую ТВ-сигнала
Недавно я задался вопросом: "Есть ли такое устройство, которое воспроизводит только.
Как выделить амплитуду и фазу сигнала без огибающей
Имеется сигнал с частотой около 4 Гц, требуется как можно точно вычислить Амплитуду и фазу. Но есть.
Как выделить полезный сигнала на фоне фума шипо-образной формы
Ищу совет (в большей степени радиотехнических статистиков и/или data scientists) как селектировать.
Выделить нижнюю боковую сигнала
Стоит необходимость маскирования речи путем инвертирования её спектра. Наткнулся на форум.
Выделить максимумы сигнала и записать их в файл
Доброго всем времени суток.У меня возникла проблема. Задача такая-выделить максимумы.
Или воспользуйтесь поиском по форуму:
ОПРЕДЕЛЕНИЕ ПОСТОЯННОЙ СОСТАВЛЯЮЩЕЙ СИГНАЛОВ МЕТОДОМ АДАПТАЦИИ
При измерении характеристик динамических объектов, полученные результаты оказываются зашумленными или искаженными, что в большинстве случаев не позволяет получить результат с требуемой точностью. Связано это с тем, что объекты окружающего мира являются динамическими системами и обладают своими внутренними изменениями, деформациями, колебаниями, а вследствие чего и шумами. В статье рассматривается возможность повышение точности определения параметров сигналов динамических систем при помощи адаптивной фильтрации. Основа метода заключается в том, что система моделирует собственную весовую функцию для каждого нового сигнала.
Адаптивные устройства обработки данных отличаются наличием определенной связи параметров передаточной функции с параметрами входных, выходных, ожидаемых, прогнозируемых и прочих дополнительных сигналов или с параметрами их статистических соотношений, что позволяет самонастраиваться на оптимальную обработку сигналов. В простейшем случае, адаптивное устройство содержит программируемый фильтр обработки данных и блок (алгоритм) адаптации, который на основании определенной программы анализа входных, выходных и прочих дополнительных данных вырабатывает сигнал управления параметрами программируемого фильтра.
Последовательность получения какого-либо параметра динамической системы изображена на рис. 1 [1]. На исследуемый объект, кроме определяемого воздействия, могут действовать и различные внешние факторы среды, которые вносят аддитивную составляющую помехи. Также сам объект, являясь сложной системой, вносит мультипликативную составляющую помехи. Далее уже искаженный физический параметр, определенным способом преобразуется в электрический, затем следует аналогово-цифровое преобразование, приведение полученного значения по заданной функции к нормальному виду.

Рис. 1 Структурная схема получения параметра динамической системы
Постановка задачи
Полученные в результате аналогово-цифрового преобразования и нормализации данные в большинстве случаев не будут пригодны для дальнейшего использования без предварительной обработки, в процессе которой минимизируются всевозможные помехи и шумы. Одним из способов устранения возникших искажений является фильтрация [1,2], при этом необходимо точно знать либо то что требуется получить, либо то что требуется удалить из сигнала. Однако, когда речь идёт о динамических системах заранее предположить что либо точно нельзя, определены только общие черты сигнала и помехи. Поэтому, даже применяя фильтрацию к одному классу динамических систем, в большинстве случаев для получения результата с ожидаемой точностью, не достаточно лишь определить тип фильтрации. Возникает необходимость подстройки фильтра в процессе фильтрации, то есть его адаптации к входному воздействию.
На рис. 2 приведен реальный сигнал, снятый с тензометрического датчика при прохождении через платформу весов железнодорожного состава. Полученная характеристика должна представлять из себя набор прямоугольных импульсов различной амплитуды . На практике , при измерении веса движущихся объектов , на полученную характеристику накладываются различные гармонические колебания , вызванные собственными продольными и поперечными колебаниями объекта .
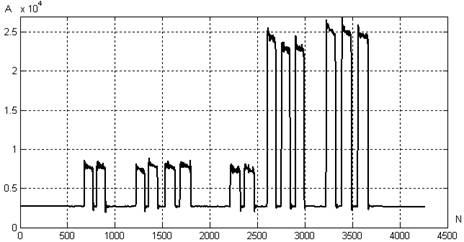
Рис. 2 Диаграмма взвешивания состава
На рис. 3 и рис. 4 изображены увеличенные части рис. 2, это и есть зашумленный сигнал при взвешивании осей тепловоза и вагона.
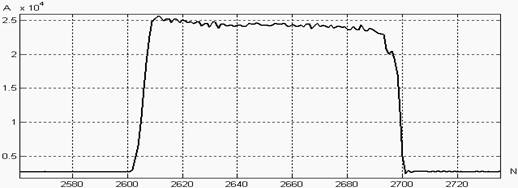
Рис. 3 Зашумленный сигнал (ось тепловоза)
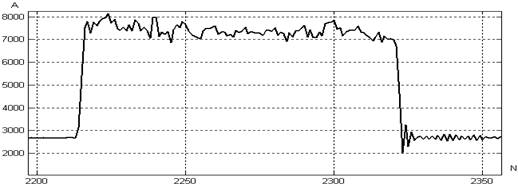
Рис. 4 Зашумленный сигнал (ось вагона)
Задачи такого типа могут быть решены несколькими способами : математическое усреднение ( интегрирование ), фильтрация низких частот, косинусные окна . В данном случае из перечисленных методов наилучшую точность дает использование косинусных окон , так при измерении веса движущихся объектов погрешность составляет порядка 0.1%. Стационарное взвешивание дает точность на несколько порядков выше, следовательно, актуальной является задача повышения точности и скорости получения параметров динамических систем.
Целью данной работы является поиск алгоритма и структуры системы использующей адаптивную фильтрацию для более точного определения параметров динамических объектов. В результате адаптации есть возможность получения оптимального КИХ-фильтра или окна для последующего синтеза КИХ-фильтров [3]. Целесообразность такого подхода и будет рассмотрена далее.
Описание предложенного адаптивного метода
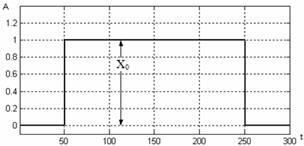
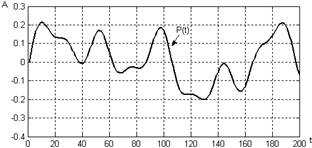
В рассматриваемом случае динамическая система обладает параметром X 0 , являющимся постоянным во времени, в течение которого производится наблюдение. Кроме того в системе возникают гармонические составляющие сигнала, искажающие наблюдаемый параметр. На рис. 5 изображен определяемый сигнал X 0 и помеха p ( t ) , представляющая собой сумму нескольких гармоник.
При измерении параметра X 0 в результате на выходе системы получен зашумленный сигнал x ( t ) , представляющий собой сумму данного параметра и аддитивных составляющих p ( t ) :
На рис. 6 изображен зашумленный сигнал, из которого необходимо выделить полезную составляющую.
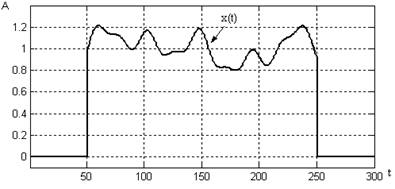
Рис. 6 Зашумленный сигнал
Исходя из метода окон [2], можно использовать ту же формулу для определения постоянной составляющей сигнала, но только в качестве весовых коэффициентов взять коэффициенты КИХ-фильтра, полученного на основе адаптивного фильтра.
Формула определения постоянной составляющей:
Следующая формула получается подстановкой в формулу (2) вместо x ( t ) формулы (1), и умножением обеих частей уравнения на знаменатель:
Раскрыв в правой части уравнения скобки и учитывая то, что интеграл суммы равен сумме интегралов, а произведение подынтегральной функции на константу равносильно произведению самого интеграла на эту константу, получается:
Следовательно, для выполнения исходной формулы должно выполняться условие:
Формула (5) является условием подавления помехи КИХ-фильтра [1], то есть необходимо выбрать такой КИХ-фильтр, после прохождения через который аддитивная помеха станет близкой к нулю. Такой фильтр можно получить с помощью адаптивной фильтрации, при этом адаптивный фильтр можно адаптировать к любой константе К, соизмеримой по величине с определяемой.
Приступая к моделированию системы известен вид входного воздействия и то, что на него наложена помеха . В состав системы будет входить адаптивный фильтр . Способ включения этого фильтра и тип образцового сигнала необходимо определить в процессе проектирования модели , кроме того необходимо предложить методику определения образцового сигнала для адаптации .
В результате моделирования были исследованы две различные адаптивные схемы позволяющие подавить помеху рис.7 и рис.8. При адаптивном моделировании обязательно требуется образцовый сигнал, а как правило в реальных условиях его нет, поэтому были испробованы различные способы его замены. Так на рис.7. приведена структура одной из наиболее результативных моделей решения проблемы. В приведенной модели адаптивный фильтр включен последовательно с системой, что позволяет в результате адаптации получить обратную модель системы. Образцовый сигнал, необходимый для адаптации фильтра, является константой. Далее полученные в результате адаптации коэффициенты адаптивного фильтра, подставляются в передаточную функцию, в результате чего получается настроенный на определенную помеху неадаптивный фильтр, то есть режекторный КИХ-фильтр. Теперь, пропуская зашумленный сигнал уже через полученный КИХ-фильтр, на выходе получаем достаточно точное подобие исходного чистого сигнала, среднее значение которого и будет соответствовать искомому параметру.
В изображенной на рис. 7 модели, в качестве входного воздействия используются прямоугольные импульсы. С помощью сумматора на них накладываются две гармонические составляющие, с частотами соизмеримыми с реальными помехами. Затем эта смесь пропускается через рекурсивное звено, представленное передаточной функцией. В результате, окончательно искаженный сигнал поступает на вход адаптивного фильтра и параллельно на вход КИХ-фильтра, представленного передаточной функцией. В качестве адаптивного фильтра был выбран фильтра Калмана как наиболее подходящий, так как он предназначен для минимизации дисперсии оценки векторного случайного процесса x(k), изменяющегося во времени следующим образом:
x (k+1)= Φ (k) x (k)+v(k),
где Φ(k) — матрица перехода, v(k) — случайный вектор (шум процесса) [4]. Что близко к поставленной задаче. На вход ошибки адаптации фильтра, подается разница между константой и сигналом с выхода фильтра. Полученные же в результате адаптации коэффициенты фильтра, записываются в специальное окно отображения результата и сохраняются в числовом векторе, используемом в дальнейшем для подстановки в передаточную функцию. В окне симулятора Scope отображены интересующие нас сигналы: входной, зашумленный, сигнал ошибки адаптации и отфильтрованный сигнал.
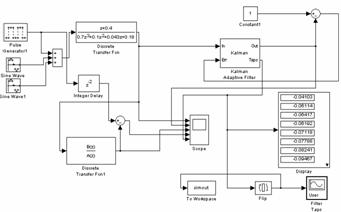
Рис. 7 Модель исследуемой системы
Суть данной модели в том, что конечный результат получается при делении, где делимым является сумма произведений коэффициентов фильтра на соответствующие отсчеты сигнала, а делителем сумма всех коэффициентов фильтра, это отражает следующая формула:
где wai – коэффициенты адаптивного фильтра,
X 0 – амплитуда зашумленного сигнала.
Модель с параллельно включенным адаптивным фильтром рис.8, полезных результатов не дала, так как в данном случая в результате адаптации получается прямая модель системы. Входное воздействие в виде прямоугольных импульсов подаются на вход рекурсивного звена заданного передаточной функцией и параллельно на вход адаптивного фильтра . В качестве сигнала ошибки для адаптивного фильтра используется разность выходов рекурсивного звена и самого фильтра . В результате адаптации фильтр пытается предсказать следующее значение на выходе рекурсивного звена , при этом адаптивный фильтр становится нерекурсивной моделью рекурсивного звена .
Вернувшись к первой модели и проанализировав получаемые в результате адаптации коэффициенты фильтра, можно сделать вывод, что каждый коэффициент адаптивного фильтра складывается из двух частей, одна из которых служит для нормализации амплитуды входного сигнала к амплитуде образцового, а вторая для удаления искажающей составляющей сигнала. Исходя из этого, можно сделать вывод что первое слагаемое bi изменяется при изменении амплитуды образцового сигнала и пропорциональна этому изменению, а второе является константой ci и зависит лишь от типа помехи.
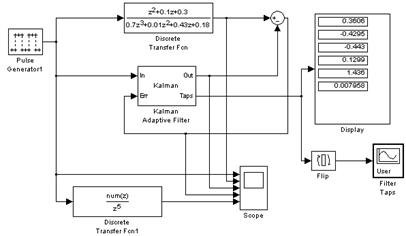
Рис. 8 Модель системы с паралельно включенным адаптивным фильтром
Следовательно, справедливо следующее равенство: