Принцип работы гидравлики
В основе работы гидравлики лежит закон Паскаля, открытый в 17 веке. Закон Паскаля гласит, что давление, действующее на жидкость в закрытом сосуде, передается во всех направлениях с одинаковой силой. На этом принципе базируется работа всех гидравлических машин объемного действия. Они вырабатывают гидравлическую энергию, приводя в движение рабочие органы оборудования. Далее давайте подробнее рассмотрим, как работает гидравлика.
Устройство, схема и принцип работы
Устройство работы гидравлики представляет собой закрытую циклическую систему, где все начинается с насоса, закачивающего гидравлическое масло из маслобака, и заканчивается опять же на возвращении жидкости в бак. Жидкость проходит весь цикл, попутно совершая действия, приводящие в работу отдельные гидроузлы. этого запускаются в работу исполнительные органы машин и механизмов. Любое механическое усилие рабочей техники и сложного промышленного оборудования зависит от гидравлики.
Сфер применений гидравлики сотни, а возможно и тысячи, но принцип везде один – в закрытой системе механизмов преобразуется механическая энергия в энергию жидкости и наоборот. Таким образуем создается механическое усилие посредством жидкости.
Схема гидросистем спецтехники и сложного промышленного оборудования в общем виде одинаковая. Для всех систем в основе лежит перечень обязательных элементов:
- Гидроцилиндр
- Гидронасос
- Гидромотор
- Бак для жидкости
- Клапаны
- Фильтры для очистки масла от примесей
- Гидрораспределитель
В зависимости от назначения техники и оборудования наполнение системы может отличаться.
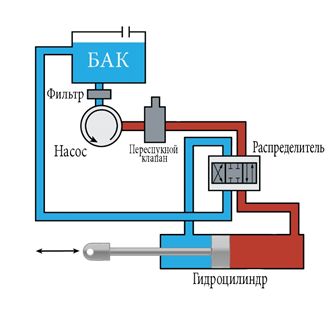
Схема стандартной гидросистемы
Как работает гидравлика?
А теперь рассмотрим на конкретных примерах, как работает гидравлика, и какие конкретные задачи она выполняет.
Как работает гидравлика на тракторе?
Принцип работы гидравлики на тракторе достаточно прост. Насос создает поток рабочей среды в гидросистеме трактора. Далее гидрораспределитель направляет масло от гидронасоса к цилиндрам и гидромотору, которые приводят в движение навесное оборудование трактора.
Как работает гидравлика на экскаваторе?
Принцип работы гидравлики экскаватора такой же, как и у гидравлики трактора, т.к. гидросистема также отвечает за работу навесного оборудования. В данном случае давление жидкости двигает поршень гидроцилиндра, поэтому ковш экскаватора поднимает и опускает грунт на строительной площадке. Управляет данной операцией сам водитель или автоматизированная система.
Как работает гидравлика погрузчика?
Как и в предыдущих примерах используется гидравлика объемного типа. Насос гидравлики погрузчика выкачивает масло из гидробака, далее масло под давлением направляется по трубам к распределителю. Водитель осуществляет управление гидравликой погрузчика при помощи рукояти. Таким образом распределителю поступает сигнал направить масло к гидроцилиндру, а затем масло сливается обратно в бак. После чего цикл движения всех элементов системы гидравлики погрузчика повторяется.
Смотрите также:
- Промышленная гидравлика
- Мобильная гидравлика
- Гидравлическое оборудование
- Принципы работы и виды гидромоторов
Принцип работы какого механизма представлен на рисунке
Тестовые вопросы по теме «Структурный анализ плоских механизмов»
— Вид анализа механизма, при проведении которого исследуют его состав, называется _____ анализом
— Задача структурного анализа пространственных рычажных механизмов – это определение:
1. угловых скоростей
2. приведённой силы
3. линейных ускорений
4. состава структуры
5. положений звеньев
— Формула Чебышева для расчета плоского механизма имеет вид …
1. ∆ W = 3 n – (2 p 5 + p 4 ) + q
2. ∆ W = 3 n – (2 p 5 + p 4 ) — q
3. ∆ W = 6 n – (2 p 5 + p 4 ) + q
4. ∆ W = 6 n – (2 p 5 + p 4 ) – q
— Число избыточных связей « q » для пространственных механизмов определяют формулой…
5. q = W +2 p 5+ p 4-3 n
— Параметрический синтез, … (несколько правильных ответов)
1. в процессе которого определяется структура будущего механизма
2. при котором по заданным звеньям и кинематическим парам механизма находятся размеры звеньев
3. при котором по заданным кинематическим или динамическим свойствам механизма находятся размеры звеньев
4. связывает число степеней свободы с числом и видом кинематических пар
5. геометрическое построение планов скоростей и ускорений
6. представляет собой сложную задачу, которая обычно имеет многовариантное решение
— Анализ механизма это
1. исследование структурных, кинематических или динамических свойств механизма
2. определение класса механизма
3. определение параметров (перемещений, траекторий, скоростей, ускорений)
4. нахождение кинематический схемы по известным параметрам механизма
— Механизм, по Асуру, состоит из _____ механизмов и последовательно присоединённых структурных групп Ассура
— Подвижное звено (вращающееся, качающееся или движущееся возвратно поступательно), которое является направляющей ползуна
-Число звеньев n в группе Ассура и число кинематических пар пятого класса p 5 связаны соотношением…
1. n p 5 = 2 3
2. n p 5 = 3 2
3. n p 5 = 1 2
4. p 5 n = 2 3
— Степень подвижности структурной группы Ассура равна…
— Группой Ассура является кинематическая цепь …
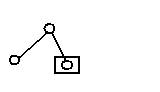
1.
4.
— Число степеней свободы плоского рычажного механизма определяются по формуле …
2. Малышева — Сомова
— Формула, применяемая для определения степени подвижности пространственной кинематической цепи …
— Плоский рычажный механизм, структурная формула которого имеет вид I-III — III, — это механизм … класса
— Число условий связи при числе степеней свободы звеньев кинематической пары равном 5 (один ответ)
— Число условий связи при числе степеней свободы звеньев кинематической пары, равном 1
— Максимальное число условий связи
— Максимальное число степеней свободы звена кинематической пары в относительном движении
— Чему равна степень подвижности группы Ассура ?
— Кинематическая цепь является группой Ассура …

1. 2 класса, 1 порядка
2. 2 класса, 2 порядка
3. 3 класса, 2 порядка
4. 2 класса, 3 порядка
— Кинематическая цепь является группой Ассура …

1. 2 класса, 1 порядка
2. 2 класса, 2 порядка
3. 3 класса, 2 порядка
4. 2 класса, 3 порядка
— Какого класса считается кинематическая пара, если число наложенных связей S=5 и число степеней свободы W=1?
1. это кинематическая пара 1 класса
2. это кинематическая пара 2 класса
3. это кинематическая пара 4 класса
4. это кинематическая пара 5 класса
— Какого класса считается кинематическая пара, если число наложенных связей S=4 и число степеней свободы W=2?
1. это кинематическая пара 1 класса
2. это кинематическая пара 2 класса
3. это кинематическая пара 4 класса
4. это кинематическая пара 5 класса
— Какого класса считается кинематическая пара, если число наложенных связей S=2, а число степеней свободы W=4?
1. это кинематическая пара 1 класса
2. это кинематическая пара 2 класса
3. это кинематическая пара 3 класса
4. это кинематическая пара 5 класса
— Какого класса считается кинематическая пара, если число наложенных связей S=1, а число степеней свободы W=5?
1. это кинематическая пара 1 класса
2. это кинематическая пара 2 класса
3. это кинематическая пара 3 класса
4. это кинематическая пара 5 класса
— Кинематическая пара, в которой звенья соприкасаются по поверхности …
— Кинематическая пара, в которой звенья соприкасаются по линии или в точке
— Какая кинематическая пара относится к 5-му классу?
— Кинематическая пара, допускающая относительное вращательное движение звеньев вокруг оси
1. первого класса
3. третьего класса
— Кинематическая пара, допускающая лишь прямолинейное поступательное относительное движение звеньев …
1. первого класса
3. третьего класса
— Механизм, звенья которого движутся в параллельных плоскостях называется
1. группа Ассура
3. кинематическая цепь
— Механизм, звенья которого описывают траектории, лежащие в пересекающихся плоскостях называется
1. группа Ассура
3. кинематическая цепь
— Укажите правильное утверждение: группа Асура это.
1. кинематическая цепь второго класса, второго порядка
2. кинематическая цепь с нулевой степенью подвижности, не распадающаяся на более простые
3. кинематические цепи с нулевой степенью подвижности
4. кинематическая цепь, не распадающаяся на более простые кинематические цепи
5. кинематическая цепь с нулевой степенью подвижности
— Возможность непрерывного перехода звена из одного заданного положения в другое
2. поворот звена
3. проворачиваемость звена
4. скорость звена
— Механизм с абсолютно жёсткими звеньями без зазора в кинематических парах
— Механизм первого класса…
1. состоит из двух подвижных звеньев
2. состоит из подвижного звена и стойки
3. состоит из двух звеньев и трёх кинематических пар
4. имеет высшую кинематическую пару
— Число механизмов первого класса в механизме равно
1. числу степеней свободы
3. числу условий связи
4. числу групп Ассура
— Звено, совершающее полный оборот вокруг неподвижной оси называется…
— Подвижное звено (вращающееся, качающееся или движущееся возвратно поступательно), которое является направляющей ползуна называется…
1. w = 3n — 2p5
2. w = 3n — 2p5 — p4
3. w = 3n — 2p5 — p4 — p3
4. w = 3n — 2p5 — p4 — p3 — p2
— Формулой w = 3 n — 2 p 5 — p 4 определяется…
1. класс механизма
2. вид механизма
3. число условий связи
4. степень подвижности
— В структурном анализе — k
1. число кинематических пар
2. число степеней свободы
3. общее число звеньев
4. число подвижных звеньев
— В структурном анализе n=k-1
1. число кинематических пар
2. число степеней свободы
3. общее число звеньев
4. число подвижных звеньев
— В формуле Чебышева — p5
1. число звеньев
2. число групп Ассура
3. число кинематических пар 5 класса
4. число степеней подвижности
— Механизм, по Асуру, состоит из первичных механизмов и последовательно присоединённых _____ групп Ассура .
— Степень подвижности «СФЕРИЧЕСКОЙ» кинематической пары равна ____ _ .
— Степень подвижности кинематической пары «Шар – Плоскость» равна
— Количество ограничений налагаемые на относительное движение каждого звена кинематической пары первого класса:
— Число степеней свободы кинематической цепи относительно _____ звена, называется степенью подвижности кинематической цепи.
— Класс кинематической пары определяется …
1. характером соприкосновения звеньев
2. видом движения звеньев
3. числом ограничений на свободу относительного движения звеньев
4. числом звеньев, входящих в соединение
— Кинематическая пара, имеющая одну связь, — это … пара
— Кинематическая пара, имеющая две связи, — это … пара
— Кинематическая пара, имеющая три связи, — это … пара
— Кинематическая пара, имеющая четыре связи, — это … пара
— Кинематическая пара, имеющая пять связей, — это … пара
— Как в теории механизмов и машин определяется класс пары?
1. по числу степеней свободы (W)
2. по числу наложенных связей (S)
3. по числу подвижных звеньев (N)
4. по рабочему ресурсу машины (кол-во лет)
— Какое из перечисленных соединений является кинематической парой?
1. Две сваренные детали
2. Две спаянные детали
3. Вал и подшипник
— Какая кинематическая пара относится к 5-му классу?
— Какая кинематическая пара относится к 1-му классу?
3. Шар на плоскости
4. Цилиндр на плоскости
— Какая кинематическая пара является плоской?
— Какая кинематическая пара является низшей?
1. Шар на плоскости
3. Цилиндр на плоскости
— Сколько неподвижных звеньев в 6-звенном механизме?
— Чему равна степень подвижности группы Ассура?
— Чему равна степень подвижности группы начальных звеньев, состоящей из стойки и одного подвижного звена?
— Чему равна степень подвижности 4-звенного плоского рычажного механизма?
1. Степени подвижности группы Ассура
2. Степени подвижности группы начальных звеньев
— Чему равна степень подвижности плоского рычажного 6-звенного механизма?
— Сколько кинематических пар образуют двукратный шарнир?
— Чему равно число звеньев, соединенных двукратным шарниром?
— Чем определяется класс группы Ассура по классификации Л.В.Ассура?
1. Числом звеньев в группе
2. Числом кинематических пар
3. Классом кинематических пар
4. Видом кинематической цепи
— Чем определяется порядок группы Ассура?
1. Числом звеньев в группе
2. Числом свободных поводков
3. Числом звеньев, не имеющих свободных поводков
4. Числом кинематических пар
— Чем определяется класс и порядок механизма по классификации Л.В.Ассура?
1. Классом и порядком самой сложной группы Ассура
2. Классом и порядком наиболее простой группы Ассура
3. Классом и порядком группы начальных звеньев
4. Видом кинематической цепи механизма
— Механизмы с высшими кинематическими парами превосходят механизмы с низшими кинематическими парами …
1. большей точностью преобразования движения
2. передачей движения на большие расстояния
3. возможностью передачи больших сил
4. использованием меньшего количества звеньев в цепи
— Звенья высшей кинематической пары соприкасаются …
1. по линии или в точке
2. по касательной
3. по поверхности
— Звенья низшей кинематической пары соприкасаются …
2. по касательной
3. по поверхности
— Кинематическая цепь, образованная звеньями входящими НЕ БОЛЕЕ ЧЕМ В ДВЕ кинематические пары, называется ____ _ .
— Кинематическая цепь, имеющая звено, входящая БОЛЕЕ ЧЕМ В ДВЕ кинематические пары, называется … цепью.
— Плоскостная пара имеет число связей S =…
— Определите класс кинематической пары.
— Определите класс кинематической пары.
— Определите класс кинематической пары.
— Определите класс кинематической пары.
— Определите класс кинематической пары.
— Определите класс кинематической пары образованной звеньями 1 и 2.
— Определите класс кинематической пары.
— Определите класс кинематической пары.
— Определите класс кинематической пары.
— Определите класс кинематической пары.
— Определите класс кинематической пары.
— Определите класс кинематической пары.
— Определите класс кинематической пары.
— Кинематическая пара относится к … классу
— Кинематическая пара относится к … классу
— Кинематическая пара является
— Кинематическая пара является
— Какого класса кинематическая пара приведена ниже?
«сфера – сфера со штифтом»
6. класс пары определить невозможно
— Какого класса кинематическая пара приведена ниже?
6. класс пары определить невозможно
— Какого класса кинематическая пара приведена ниже?
6. класс пары определить невозможно
— Какого класса кинематическая пара приведена ниже?
6. класс пары определить невозможно
— Какого класса кинематическая пара приведена ниже?
6. класс пары определить невозможно
— Какого класса кинематическая пара приведена ниже?
6. класс пары определить невозможно
— Какого класса кинематическая пара приведена ниже?
6. класс пары определить невозможно
— Какого класса кинематическая пара приведена ниже?
6. класс пары определить невозможно
— Чему равна степень подвижности механизма?
— Что представляет собой данная механическая система?
3. Группа Ассура
4. Группа начальных звеньев
— Какого класса данный механизм по классификации Л.В.Ассура?
— Чему равна степень подвижности механизма?
— Чему равна степень подвижности механизма?
— Определить степень подвижности механизма и найти его класс.
1. W =1, механизм II класса
2. W =2, механизм I класса
3. W =1, механизм I класса
4. W =2, механизм II класса
— Укажите правильное утверждение: группа Асура это…
1. кинематическая цепь второго класса, второго порядка
2. кинематическая цепь с нулевой степенью подвижности не распадающаяся на более простые кинематические цепи с нулевой степенью подвижности
3. кинематическая цепь, не распадающаяся на более простые кинематические цепи
4. кинематическая цепь с нулевой степенью подвижности
— Сколько групп Ассура присоединено к первичному механизму?
— Какие из приведенных ниже достоинств вы отнесете к преиму ществам низших кинематических пар перед высшими.
1. отсутствие замыкания звеньев
2. высокая технологичность
3. способность передавать большие нагрузки и высокая износо стойкость
4. малые ограничения на относительные движения звеньев
— Число степеней свободы механизма равно

— Число степеней свободы механизма равно
— Число степеней свободы W манипулятора равно.
— Число степеней свободы W манипулятора равно.
— Число степеней свободы W манипулятора равно.
— Число степеней свободы манипулятора равно …
— Число степеней свободы манипулятора равно …
— Число степеней свободы плоского механизма, структурная схема которого приведена на рисунке, равно.
— Число степеней свободы механизма, структурная схема которого приведена на рисунке, равно.
— Число степеней свободы механизма, структурная схема которого приведена на рисунке, равно.
— Число степеней свободы пространственного механизма, структурная схема которого приведена на рисунке, равно.
— Число избыточных связей механизма, структурная схема которого приведена на рисунке, равно.
— Число избыточных связей механизма, структурная схема которого приведена на рисунке, равно.
— Число избыточных связей механизма, структурная схема которого приведена на рисунке, равно.
— Число избыточных связей механизма, структурная схема которого приведена на рисунке, равно.
— Число избыточных связей механизма, структурная схема которого приведена на рисунке, равно.
— Кривошипом является звено.

— Число степеней свободы у сферической кинематической пары равно.

— Число степеней свободы представленного на рисунке механизма равно.
— Порядок группы равен.
— Синтез рычажных механизмов, при котором получаемый механизм точно выполняет заданные условия синтеза только в заданном конечном числе его положений, называется.
1. структурным синтезом
2. интерполяционным синтезом
3. динамическим синтезом
4. кинематическим синтезом
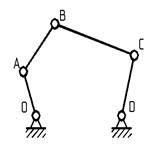
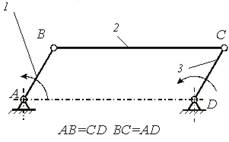
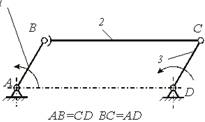
— На рисунке приведена структурная схема шарнирного четырехзвенного механизма (1- кривошип, 3- коромысло). В крайних положениях механизма должны выполняться зависимости
— Если φ y — угол удаления; φд — угол дальнего стояния; φс — угол сближения; φб — угол ближнего стояния, то рабочий профильный угол δ p определяется формулой.
1. δ p = φ y + φ Д + φ С ;
2. δ p = φ б + φ Д ;
3. δ p = φ y + φ С ;
4. δ p = φ y + φ б + φ С ;
5. δ p = φ y + φ Д + φ С + φ б .
— Дополнительные условия синтеза обычно выражаются в виде.
1. неравенств, устанавливающих допустимые области существования параметров синтеза
2. целевой функции
3. функции положения
4. первой передаточной функции
— Плоскостная кинематическая пара имеет.
1. одну вращательную и две поступательных степени свободы
2. одну вращательную и одну поступательную степени свободы
3. две вращательных и одну поступательную степеней свободы
4. три вращательных и одну поступательную степеней свободы
5. одну вращательную и три поступательных степени свободы
— Класс структурной группы равен.

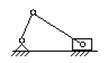
— Ход ползуна 3 H кривошипно-ползунного механизма (см. рисунок) определяется зависимостью. ( l AB — длина кривошипа 1: l BC — длина шатуна 3)
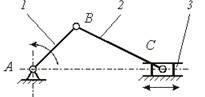
1. H = l BC + l AB
2. H = l AB
3. H = l BC — l AB
4. H =2 l AB
— К методам решения задач оптимизации в синтезе механизмов не относится
1. метод комбинированного поиска
2. метода направленного поиска
3. метод случайного поиска
4. метод планов скоростей и ускорений
— Параметрами синтеза механизма, устанавливаемые заданием на синтез, называются.
1. выходными параметрами синтеза механизмов
2. входными параметрами синтеза механизмов
3. геометрическими параметрами схемы механизма
4. параметрами синтеза механизма
— Свойство, которое выражает назначение механизма и должно быть обязательно выполнено в спроектированном механизме, называется.
1. параметром синтеза
2. этапом синтеза
3. основным условием синтеза
4. дополнительным условием синтеза
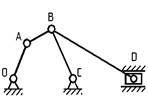
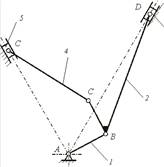
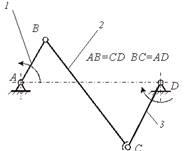
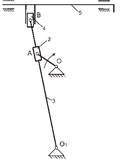
— Точка D будет занимать крайние положения если.
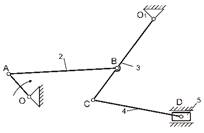
1. кривошип ОА будет находиться в вертикальном положении
2. звенья АО и АВ будут находиться на одной прямой
3. угол АВО1 будет равен 90 °
4. кривошип ОА будет находиться в горизонтальном положении
— Проектирование механизма для получения его заданных свойств называется.
1. структурным синтезом механизма
2. динамическим синтезом механизма
3. синтезом механизма
4. кинематическим синтезом механизма
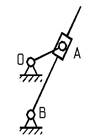
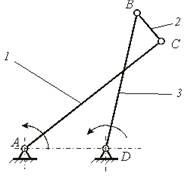
— В рычажном механизме двигателя Баландина (см. рис.) АВ=АС=ОА. Чему равны W , q τ , класс механизма:
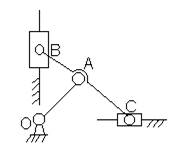
1. W =1, qτ = 1, II класс
2. W =2, qτ = 0, II класс
3. W =0, III класс, q τ = 0
4. W =1, qτ = 0, II класс
— Что произойдет с механизмом (см. рис.), если соотношение длин звеньев сделать произвольным AB ≠ AC ≠ OA :
1. В механизме появится еще одна степень свободы
2. Механизм превратится в статически определимую ферму
3. Механизм превратится в статически неопределимую ферму
4. Структурные признаки ( W , q , класс) останутся без изменения
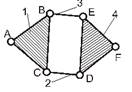
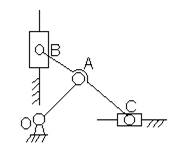
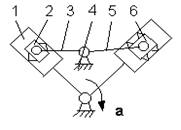
— Дайте характеристику кинематической цепи (см. рис.):

1. Механизм, W = 2, III класс
2. Статически определимая ферма
3. Механизм, W = 1, q τ = 1, III класс
4. Статически определимая ферма, состоящая из двух структурных групп
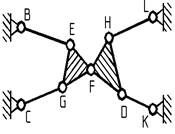
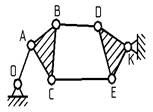
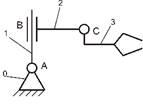
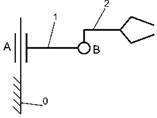
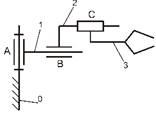
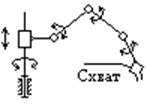
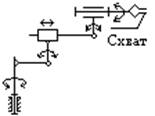
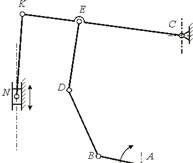
— В структурной схеме механизма долбежного станка (см. рис.) выделите элементарные механизмы и укажите способ их соединения:
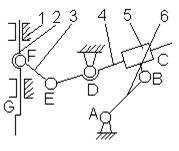
— Спроектируйте самоустанавливающийся механизм долбежного станка (см. рис.). Укажите правильное решение среди перечисленных:
1. А(1в), В(1в), С(1п), D (1в), Е(1в), F (1в), G (1п)
2. А(1в), В(3с), С(2ц), D (1в), Е(1в), F (3с), G (2ц)
3. А(3с), В(3с), С(1п), D (1в), Е(3с), F (3с), G (1п)
4. А(1в), В(3с), С(2ц), D (1в), Е(3с), F (3с), G (1п)
— При проектировании плоского самоустанавливающегося механизма получены следующие структурные схемы (см. рис.). Укажите, что собой представляет кинематическая цепь изображенная: 1) на рис. а; 2) рис. б; 3) рис. в; г) рис. г, если ХХ||Х’Х’||Х»Х» и ХХ YY ? Укажите правильное решение среди перечисленных:
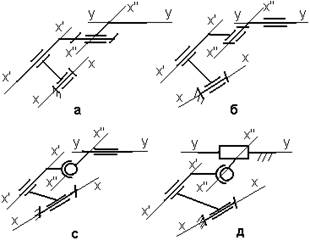
1. Кинематически неизменяемая система
2. Плоский несамоустанавливающийся механизм
3. Плоский самоустанавливающийся механизм
4. Пространственный механизм
5. Сферический механизм
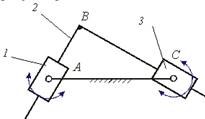
— Какую плоскую кинематическую пару образуют в плоской схеме звенья 1 и 2 (рис. а) механизма двигателя внутреннего сгорания:
1. Высшую одноподвижную
2. Высшую двухподвижную
3. Низшую одноподвижную
4. Низшую двухподвижную
Адрес: Россия, 450071, г.Уфа , почтовый ящик 21
Принцип работы какого механизма представлен на рисунке
Лабораторная работа
Строение и структурный анализ механизмов
1. Цель работы
— Усвоить основные понятия и определения теории механизмов и машин.
— Ознакомиться с простейшими видами механизмов и названиями их звеньев.
— Научиться определять какие схемы кинематических цепей являются схемами механизмов.
— Научиться по моделям строить структурные схемы простейших плоских механизмов, определять степень подвижности их и выделять группы Ассура .
2. Теоретические положения
2.1 Основные понятия и определения
Звено – одно или несколько жестко соединенных твердых тел, входящих в состав кинематической цепи (механизма).
Кинематическая пара – подвижное соединение двух соприкасающихся звеньев, допускающее вполне определенное движение относительно друг друга.
Кинематическая цепь – система звеньев, связанных между собой кинематическими парами.
Механизм – такая кинематическая цепь, в которой при заданном движении одному или нескольким звеньям относительного любого из них, все остальные звенья совершают однозначно определяемые движения.
Плоскими механизмами называются такие, точки звеньев которых описывают траектории, лежащие в параллельных плоскостях.
Кинематические звенья, кинематические пары, кинематические цепи и механизм изображают графически, используя рекомендуемые обозначения (таблица 1).
Звенья механизмов делятся на подвижные и неподвижные. Неподвижное звено называют стойкой. На рисунке 1 стойка обозначена цифрой ноль (0).
Входное звено – звено, которому сообщается движение, преобразуемое механизмом в требуемые движения других звеньев. На схемах входному звену задается движение стрелкой: звено 1 на рисунке 1, а, б , в; звено 8 на рисунке 1, г; звено 10 на рисунке 1, д.
Выходное звено – звено, совершающее движение, для выполнения которого создается механизм: звенья 3, 5, 7, 9, 11 на рисунке 1.
Таблица 1. Условные обозначения пар и звеньев механизмов
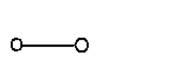
Стержень, рычаг, ось, вал, шатун
Звено в форме треугольника.
Соединение стержней – жесткое. Каждое
представляет собой одно звено.
звено: ползун или камень кулисы.
Вращательная кинематическая пара.
Соединение ведущего звена со стойкой
вращательной парой А.

Поступательно движущееся звено,
состоящее из двух жестко соединенных
Шарнирное соединение стержня с
поступательно движущимся звеном.
Ползун в направляющих: а и б –
охватывают ползун. Ползун
охватывает направляющую – в .
Камень кулисы: а и б – камень кулисы
охватывает кулису; в – кулиса охватывает
Наличие окружности, выполненной
обозначает, что на схеме
представлен зубчатый механизм.
Варианты обозначения зубчатых
механизмов состоящих из двух
цилиндрических колёс внешнего
Кривошип – звено, совершающее полный оборот вокруг неподвижной оси (рисунок 1, а, б , в).
Камень кулисы – звено, поступательно движущееся относительно подвижной направляющей (звено 2, рисунок 1, а).
Кулиса – подвижная направляющая поступательной кинематической пары (звено 3, рисунок 1, а), которая соединена со стойкой (звено 1, рисунок 1).
Шатун – звено, совершающее сложное плоско-параллельное движение и не имеющее кинематических пар со стойкой (звено 4, рисунок 1, б).
Ползун – звено, образующее со стойкой поступательную пару (звено 5, рисунок 1, б).
Коромысло – звено, совершающее колебательные движения относительно неподвижной оси (звено 7, рисунок 1, в).
Кулачок – звено, которое выполнено в виде поверхности переменной кривизны (звено 8, рисунок 1, г).
Толкатель – звено кулачкового механизма, взаимодействующее с рабочей поверхностью кулачка и совершающее поступательное движение (звено 9, рисунок 1, г).
Шестерня – зубчатое колесо с меньшим числом зубьев (меньшего диаметра) по сравнению с другим зацепляющимся с ним зубчатым колесом (на рисунке 1, д, шестерня 10, зубчатое колесо 11).
Названия рычажным механизмам дают по входному и выходному звеньям. На рисунке 1, а «кривошипно-кулисный механизм», «кривошипно-ползун- ный » (рисунок 1, б). Название механизма на рисунке 1, д соответствует конструктивному исполнению звеньев в виде тел вращения с нарезанными зубьями – «зубчатый механизм», на рисунке 1, г – «кулачковый механизм».
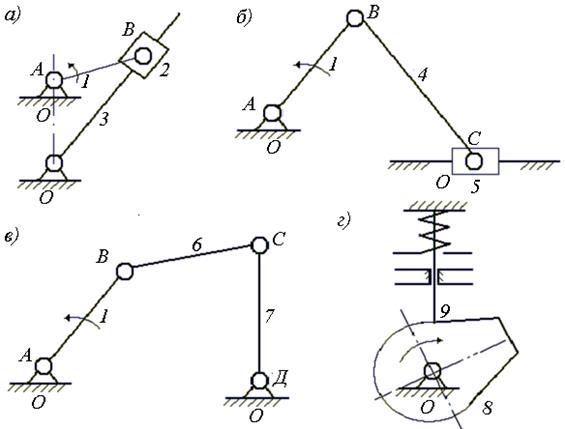
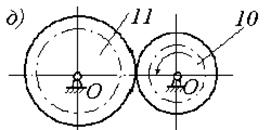
Рис. 1. Схемы механизмов
2.2. Классификация кинематических пар
Любая кинематическая пара ограничивает движение звеньев, эти ограничения называют связями.
Кинематические пары классифицируют по следующим признакам:
По числу связей , налагаемых на относительное движение их звеньев. Класс кинематической пары определяется числом связей.
По форме контакта соприкасающихся звеньев: по поверхности – такие кинематические пары называются низшими; по линии или в точке – высшими.
По виду относительного движения для каждого из образующих ее звеньев:
обратимые кинематические пары реализует один и тот же вид движения для каждого звена (кинематические пары III , IV , V классов);
необратимые кинематические пары ( I , II классов) реализуют разные виды движения для каждого звена образующих их.
2.3. Структурный анализ
Степень подвижности плоских механизмов определяется по формуле Чебышева:
где n – число подвижных звеньев механизма;
p 5 – число кинематических пар пятого класса;
p 4 – число кинематических пар четвертого класса.
В основе структурной теории лежат два понятия: механизм первого класса и структурная группа (группа Ассура ).
Механизмом первого класса или начальным механизмом – условно названо входное звено, соединенное со стойкой кинематической парой V класса, вращательной или поступательной (рисунок 2) .
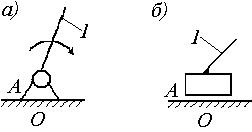
Рис. 2. Механизмы первого класса
Лекция 2. Структура механизмов .
Система – полный, целостный набор элементов, взаимосвязанных между собой так, чтобы могла реализоваться функция системы.
В любой научной теории переход от описания к объяснению, от явлений к сущности, от формы к содержанию совпадает с познанием структуры исследуемых систем и процессов, с переходом от одних структурных уровней к другим, более глубоким. Структура – строение и внутренняя форма организации системы, выступающая как единство устойчивых взаимосвязей между ее элементами, а также законов данных взаимосвязей. Структура – неотъемлемый атрибут всех реально существующих объектов и систем. Связь элементов в структуре подчиняется диалектике взаимоотношения части и целого.
Все многообразие существующих механизмов можно представить как внешнее проявление состояния внутренних параметров системы, имя которой механизм. Для изучения этих параметров удобно и естественно использовать структурные модели различного уровня сложности.
Знакомство с механизмом начинается с выделения его составных частей и определения связей между ними, т.е. с изучения структуры.
От структуры зависят вид и все основные свойства механизма, например, механическая система в зависимости от ее строения может быть манипулятором, имитирующим движение руки человека, зубчатым механизмом или статически неопределенной фермой. Поэтому естественно, что структурная теория является одним из фундаментальных разделов теории механизмов и машин.
Структурная теория как подсистема теории механизмов дает возможность понять законы строения и работу механизма и на этой основе строить его расчетные схемы; проектировать схему механизма по заданным свойствам, судить о технологичности существующих и вновь создаваемых конструкций механизмов и их эксплуатационных свойствах; систематизировать механизмы и с помощью классификаций охватить все их многообразие; использовать аналогичные методы анализа и синтеза для родственных групп механизмов. Целью учения о структуре как системы является познание составных частей механизма и связей между ними, отражающих их взаимодействие, а также общих методов исследования строения механизма (структурный анализ) и проектирования его структуры по заданным свойствам (структурный синтез).
Первый камень в конструкцию учения о структуре заложили Г. Монж (1746-1818) и его ученики, разложившие машину на ее элементарные составляющие – механизмы, задачей которых являлось преобразование движений [12]. До этого считалось, что любую машину можно свести к «простым машинам» — рычагу, блоку, вороту, наклонной плоскости, клину, принцип работы которых основан на равновесии сил. Следующий шаг сделал А. Баумгартнер (1793-1855), который выделил последовательное и параллельное соединения механизмов. Немецкий машиновед Ф. Рело (1829-1905) создал учение о кинематических парах (подвижных соединениях звеньев). Он сделал вывод, что сущность механизма состоит не в физической весомости звеньев, а в связывающей их пустоте – паре. Рело ввел понятие кинематических цепей как совокупности звеньев и кинематических пар и представил механизм как частный случай кинематической цепи. Он положил начало структурному анализу, разложив механизм на звенья и пары, и структурному синтезу, показав, что механизм можно получить, закрепив одно из звеньев кинематической цепи. Ф. Грасгоф (1826-1893) при классификации кинематических пар использовал понятие степеней свободы. После опубликования его работы на повестку дня встал вопрос определения связи между числом степеней свободы механизма и числом звеньев и кинематических пар. Первым эту задачу решил П. Л. Чебышев (1821-1894), опубликовав в 1869 г. структурную формулу для плоских шарнирных механизмов с одной степенью свободы. Исследования в этом направлении продолжили М. Грюблер (1851-1935) и П.О. Сомов (1852-1919). Грюблер разработал ряд частных структурных формул для стержневых систем, в том числе для статически неопределимых механизмов и ферм, а Сомов предложил структурную формулу для кинематической цепи общего вида. Х.И. Гохман (1851-1916) нашел формулу, связывающую число замкнутых контуров механизма с числом образующих его звеньев и пар. Появление структурных формул расширило возможности структурного анализа и синтеза механизмов.
Структурная теория двигалась вслед за машиностроением, но никак не могла его догнать. Проектирование схемы механизма по заданным структурным свойствам с использованием структурных формул оказалось малоэффективным. Требовались новые, более мощные методы. Вплотную к решению этой задачи подошел Л. Бурместер (1840-1927), который использовал такие понятия, как элементарный механизм, состоящий из двух звеньев и одной пары, простой механизм, представляющий собой замкнутую кинематическую цепь, и составной механизм. Однако основоположником нового метода структурного синтеза механизмов стал Л.В. Ассур (1878-1920). До него были известны примеры построения механизмов путем присоединения к исходному механизму ферм, состоящих из двух звеньев и трех кинематических пар и даже фермы из четырех звеньев и шести пар. Ассур обобщил полученные индуктивным способом частные решения и сформулировал общий принцип образования плоских шарнирных механизмов, в соответствии с которым любой плоский шарнирный многозвенник можно получить путем последовательного наслоения на исходный элементарный механизм кинематических цепей нулевой подвижности (структурных групп). Он также разработал метод получения новых (ранее неизвестных) структурных групп. Первый этап развития структурной теории закончился в начале XX в. с появлением структурных классификаций механизмов по М. Грюблеру и Л. Ассуру . В основе классификации Грюблера лежала замкнутая кинематическая цепь, а у Ассура – структурная группа.
Отличительными чертами первого этапа развития структурной теории являются, с одной стороны, создание отдельных тематических компонент системы знаний о строении механизма: учений о кинематических парах и кинематических цепях, структурных формул, теории структурных групп, структурный анализ и структурный синтез, структурные классификации, а с другой,– отсутствие или слабая связь этих компонент между собой и с практикой проектирования.
Второй этап развития структурной теории (с середины 20-х до середины 60-х годов XX в .) характеризуется переосмыслением ранее полученных теоретических результатов с учетом нового фактического материала. А.П. Малышев (1879-1962) уточнил структурные формулы Чебышева и Сомова с учетом избыточных связей и произвольного числа степеней свободы. Он разделил кинематические пары на классы по числу условий связи, накладываемых на относительное движение звеньев. В.В. Добровольский (1880-1957) предложил различать кинематические пары по числу степеней свободы в относительном движении звеньев, выделив одноподвижные, двухподвижные и т.д. пары. Г.Г. Баранов (1899-1968) и В.В. Добровольский нашли новые способы получения структурных групп, а Г.Г. Баранов и И.И. Артоболевский (1905-1977) разработали их классификации. Накопившийся за годы исследований справочный материал по кинематическим и динамическим свойствам механизмов сделал возможным подбирать структурную схему механизма исходя не только из структурных, но и кинематических и динамических условий.
Главным достижением второго периода развития структурной теории стало создание И.И. Артоболевским и В.В. Добровольским учения о строении механизмов как системы, в которой отдельные тематические компоненты (теории кинематических пар и структурных групп, структурные анализ и синтез, структурная классификация) стали взаимосвязаны. Универсальная структурная классификация позволила связать между собой строение механизмов и методы их кинематического и силового анализа. Структурная теория стала каркасом новой науки и учебной дисциплины – теории механизмов, выделившейся из механики машин в конце 30-х гг. XX в.
На современном этапе развития структурной теории наряду с продолжением работ в традиционных разделах получили развитие новые направления. В связи с развитием вычислительной техники стало возможным на базе построения математических моделей структуры механизма проводить оценки функциональных возможностей сложных механизмов, что расширяет возможности структурного синтеза. В последние годы усилиями Л.Н. Решетова, О.Г. Озола , С.Н. Кожевникова (1906-1988) и их учеников интенсивно развивается новое направление в структурном синтезе механизмов – проектирование самоустанавливающихся (без избыточных связей) механизмов.
Понятие о структурном синтезе и анализе
C труктура любой технической системы определяется функционально связанной совокупностью элементов и отношений между ними. При этом для механизмов под элементами понимаются звенья, группы звеньев или типовые механизмы, а под отношениями подвижные (КП) или неподвижные соединения. Поэтому под структурой механизма понимается совокупность его элементов и отношений между ними, т.е. совокупность звеньев, групп или типовых механизмов и подвижных или неподвижных соединений. Геометрическая структура механизма полностью описывается заданием геометрической формы его элементов, их расположения, указания вида связей между ними. Структура механизма может быть на разных стадиях проектирования описываться различными средствами, с разным уровнем абстрагирования: на функциональном уровне — функциональная схема, на уровне звеньев и структурных групп — структурная схема и т.п. Структурная схема (рис.2.1) — графическое изображение механизма, выполненное с использованием условных обозначений рекомендованных ГОСТ (см. например ГОСТ 2.703-68) или принятых в специальной литературе, содержащее информацию о числе и расположении элементов (звеньев, групп), а также о виде и классе кинематических пар, соединяющих эти элементы. В отличие от кинематической схемы механизма, структурная схема не содержит информации о размерах звеньев и вычерчивается без соблюдения масштабов.
Любой механизм является трехмерным объектом, поэтому для описания его строения используют трехмерные (пространственные) структурные модели. Для описания строения плоских механизмов используют также двумерные (плоские) структурные модели, представляющие собой проекцию трехмерных на плоскость.
Кинематическая схема механизма – структурная схема механизма с указанием размеров звеньев, необходимых для кинематического анализа механизма.
Стойка на структурной схеме отмечается штриховкой; все звенья нумеруются; кинематические пары обозначаются латинскими буквами. Звено, входящее в одну или две низшие пары, изображается в виде стержня, а звенья, входящие в три и более кинематические пары, могут изображаться также в виде треугольника, четырехугольника и т.д. и заштриховываться. Если на схеме несколько звеньев соединяются одним шарниром, то это многократный шарнир и число кинематических пар в нем на единицу меньше числа сходящихся звеньев. Следует отметить, что треугольник, образованный тремя звеньями и тремя кинематическими парами, является одним звеном, так как образовавшие его стержни не имеют относительного движения. Поэтому в структурной схеме такой жесткий треугольник часто заштриховывается (рис.2.1). Для звеньев, образующих высшую кинематическую пару, показываются элементы кинематических пар. Структурная схема механизма может быть представлена и аналитической записью.
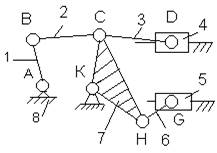
Рис.2.1. Структурная схема механизма
Как на любом этапе проектирования при структурном синтезе различают задачи синтеза и задачи анализа.
Задачей структурного анализа является задача определения параметров структуры заданного механизма — числа звеньев и структурных групп, числа и вида КП, числа подвижностей (основных и местных), числа контуров и числа избыточных связей.
Задачей структурного синтеза является задача синтеза структуры нового механизма, обладающего заданными свойствами: числом подвижностей, отсутствием местных подвижностей и избыточных связей, минимумом числа звеньев, с парами определенного вида (например, только вращательными, как наиболее технологичными) и т.п.
Основные понятия структурного синтеза и анализа
Подвижность механизма — число независимых обобщенных координат однозначно определяющее положение звеньев механизма на плоскости или в пространстве.
Связь — ограничение, наложенное на перемещение тела по данной координате.
Избыточные (пассивные) — такие связи в механизме, которые повторяют или дублируют связи, уже имеющиеся по данной координате, и поэтому не изменяющие реальной подвижности механизма. При этом расчетная подвижность механизма уменьшается, а степень его статической неопределимости увеличивается. Иногда используется иное определение: Избыточные связи — это связи число которых в механизме определяется разностью между суммарным числом связей, наложенных кинематическими парами, и суммой степеней подвижности всех звеньев, местных подвижностей и заданной (требуемой) подвижностью механизма в целом.
Местные подвижности — подвижности механизма, которые не оказывают влияния на его функцию положения (и передаточные функции), а введены в механизм с другими целями (например, подвижность ролика в кулачковом механизме обеспечивает замену в высшей паре трения скольжения трением качения).
Свойства связей
В классической механике связями называют ограничения, налагаемые на положения и скорости точек механической системы, которые должны выполняться при любых действующих на систему силах . Они могут быть записаны в виде уравнений или неравенств. Уравнения, которым в силу наложенных связей должны удовлетворять координаты точек механической системы и их скорости (первые производные от координат по времени), называются уравнениями связей. Самыми распространенными в механизмах являются геометрические связи, которые ограничивают относительные перемещения звеньев и уравнения которых содержат только координаты точек (и, может быть, время). Такие связи имеют все кинематические пары и кинематические соединения с твердыми промежуточными элементами.
Кроме геометрических связей, в механизмах могут быть дифференциальные (кинематические) связи, уравнения которых содержат координаты точек и производные от этих координат по времени (и, может быть, время). Если эти уравнения интегрируются, то дифференциальная связь приводится к геометрической . Дифференциальные интегрируемые и геометрические связи называются голономными связями. Дифференциальные связи, уравнения которых не могут быть проинтегрированы, являются неголономными связями. Неголономные связи появляются в кинематических парах при учете трения.
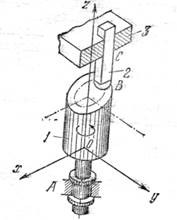
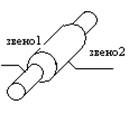
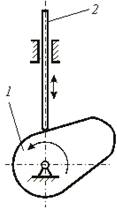
Особое место занимает фрикционная пара. Рассмотрим фрикционную передачу (рис.2.1.1), состоящую из цилиндрических катков 1 и 2, стержня 3, стойки 5 и пружины 4, которая не входит в число звеньев и предназначена для обеспечения необходимого прижатия катков.
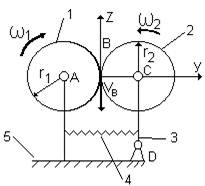
Выясним, какие связи накладывает высшая кинематическая пара В , которая образуется в месте соприкосновения катков. Цилиндрические колеса соприкасаются по общей образующей, совпадающей с осью Х, проходящей перпендикулярно плоскости чертежа. Кинематическая пара ликвидирует перемещение вдоль оси У и вращение вокруг оси Z, накладывая две геометрические связи. Если трение между катками настолько велико, что нет проскальзывания, то наложена еще одна (дифференциальная) связь. Уравнение этой связи следует из кинематического условия V в = ω 1 r1 = ω 2 r 2 .
Интегрируя и принимая, что в начале φ 1 = 0 и φ 2 = 0, получаем φ 2 = φ 1 r 1 / r 2 . Полученное уравнение связи выражает зависимость между угловыми перемещениями колес и имеет вид геометрической связи. Известно, что передача движения во фрикционной передаче обусловлена упругим скольжением деформированных участков катков, поэтому приведенное уравнение связи можно рассматривать только как первое приближение к действительному. С учетом упругого скольжения φ 2 = φ 1 r 1 (1- λ )/ r 2 , где λ – коэффициент скольжения, зависящий от силы прижатия катков, материала катков и вида смазочного материала. Во втором приближении коэффициент скольжения λ считается постоянным (определяется опытным путем). Второе приближение оказывается достаточно точным в инженерных расчетах при оценке сил и прочности в передаче (» Детали машин »). Ввиду малости коэффициента λ (0,03…0,001) для кинематического анализа обычно достаточно и первого приближения. Связь, обусловленную трением между катками во фрикционной передаче, называют псевдокинематической .
Кроме голономной или неголономной связь может быть удерживающей или неудерживающей, стационарной или нестационарной. Связи, в уравнения которых время явно не входит, называют стационарными. В уравнение нестационарной связи время входит в явной форме. Удерживающими называют связи, при наличии которых для любого возможного перемещения точки механической системы противоположное ему перемещение также является возможным. Удерживающие связи описываются равенствами, а неудерживающие — неравенствами. Неудерживающие связи характерны для гибких звеньев.
В курсе «Теория механизмов» рассматриваются механизмы с голономными, стационарными и удерживающими связями. В механизмах связи обычно действуют постоянно. Однако существуют механизмы переменной структуры, в которых связи, оставаясь стационарными, изменяются в какой-то момент времени. Например, в планетарной коробке скоростей из одного зубчатого механизма с несколькими степенями свободы путем включения элементов управления (муфт и тормозов) получают несколько различных по строению механизмов с одной степенью свободы. Другим примером механизма переменной структуры может служить фрикционный механизм (рис.2.1.1), в котором при недостаточной силе прижатия катков начинается буксование: входное звено вращается, а выходное — неподвижно.
Степень свободы и классы кинематических пар
Соединение двух соприкасающихся звеньев, допускающее их относительное движение, называется кинематической парой.
Совокупность поверхностей, линий и отдельных точек звена, по которым оно может соприкасаться с другим звеном, образуя кинематическую пару, называется элементом кинематической пары.
Если звенья подвижно соединяются в нескольких местах, то кинематическая пара является разветвленной , а отдельные части этого соединения называются ветвями кинематической пары.
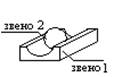
Любой механизм состоит из звеньев, соединенных между собой кинематическими парами. Возможные подвижные соединения звеньев весьма разнообразны. Например, на рис.2.1.2,а показана так называемая вращательная кинематическая пара, в которой соединение звеньев А и В образуется двумя цилиндрами, находящимися в постоянном соприкосновении.
На рис.2.1.2, б изображен другой способ соединения двух звеньев А и В. Эта пара допускает относительное перекатывание, скольжение или верчение.
а) б)
Таким образом, на относительное движение каждого звена кинематической парой накладываются ограничения, зависящие от способа соединения звеньев в пары. Эти ограничения называются числом условий связи S. Рассмотрим теперь, какие же связи и в каком количестве могут быть наложены на относительное движение звеньев кинематической парой.
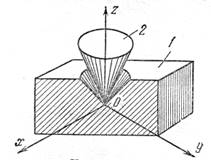
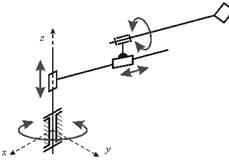
Для абсолютно твердого тела, свободно движущегося в пространстве пространстве (в декартовой системе координат X, Y, Z), число независимых параметров, определяющих его положение в пространстве или число степеней свободы, равно шести (рис.2.2): три возможных перемещения вдоль неподвижных координатных осей X, Y и Z и три возможных вращения вокруг этих осей.
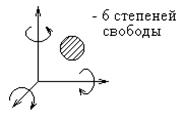
Рис. 2.2. Степени свободы тела в пространстве
Для звеньев, вошедших в кинематическую пару, число степеней свободы всегда меньше шести, так как кинематическая пара уменьшает число возможных перемещений и накладывает число условий связи S на относительное движение каждого звена, зависящих от способа соединения звеньев в пары. В таком случае число степеней свободы H кинематической пары равно
H = 6 − S . (1)
Все кинематические пары делятся на классы в зависимости от числа условий связи, налагаемых ими на относительное движение звеньев. Так как число условий связи может быть от одного до пяти, то число классов пар равно пяти. В соответствии с этим имеем кинематические пары I − V классов. Например, если телами (звеньями), образовавшими кинематическую пару, утрачено по 5 степеней свободы каждым, эту пару называют кинематической парой 5-го класса. Если утрачено 4 степени свободы – 4-го класса и т.д. (рис.2.3). При S =0 пары не существует, а есть два тела, движущихся независимо друг от друга. При S =6 кинематическая пара становится жестким соединением двух звеньев, т.е. одним звеном.
Класс кинематической пары может быть определен из зависимости (1):
S = 6 – H . (2)
На рис. 2.3 представлены кинематические пары различных классов.
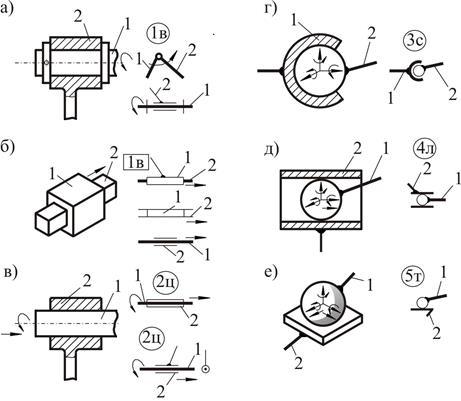

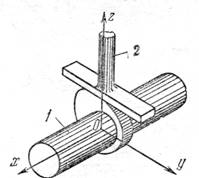
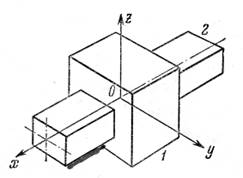
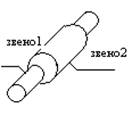
SHAPE \* MERGEFORMAT Одноподвижные кинематические пары V класса ( Н=1, S =5) могут быть двух видов: одноподвижная вращательная пара (условное обозначение , рис. 2.3,а) допускает лишь одно относительное вращательное движение звеньев вокруг оси (показано стрелкой); звенья 1 и 2 соприкасаются по цилиндрической поверхности; следовательно, это низшая пара, замкнута геометрически. Роль такой кинематической пары выполняет более сложная конструкция — шарикоподшипник.

Одноподвижная поступательная кинематическая пара V класса (условное обозначение , рис. 2.3,б) с геометрическим замыканием, низшая, допускает лишь одно прямолинейное поступательное относительное движение звеньев.

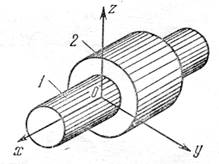
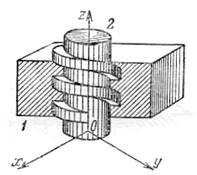
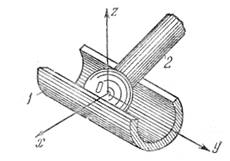
Двухподвижная цилиндрическая кинематическая пара IV класса (Н=2, S =4, условное обозначение , рис. 2.3,в) с геометрическим замыканием, низшая, допускает независимые относительные движения звеньев – вращательное вокруг оси и поступательное вдоль оси кинематической пары.

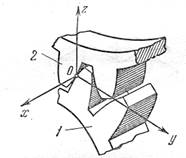
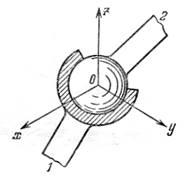
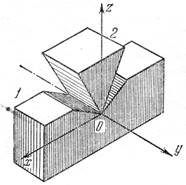
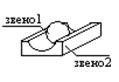
Трехподвижная сферическая кинематическая пара III класса (Н=3, S =3, условное обозначение , рис. 2.3,г) с геометрическим замыканием, низшая, допускает три независимых относительных вращения звеньев вокруг осей x , y , z .
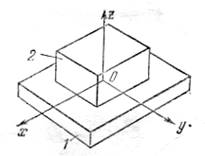
Четырехподвижная линейная кинематическая пара II класса (Н=4, S =2) и пятиподвижная точечная кинематическая пара I класса (Н=5, S =1) и их условные обозначения (  и
и  , даны на рис. 2.3,д ,е ). Возможные независимые относительные движения звеньев (вращательные и поступательные) показаны стрелками. Это высшие пары, поскольку контакт элементов звеньев линейный (шар в цилиндре) и точечный (шар на плоскости). Пара
, даны на рис. 2.3,д ,е ). Возможные независимые относительные движения звеньев (вращательные и поступательные) показаны стрелками. Это высшие пары, поскольку контакт элементов звеньев линейный (шар в цилиндре) и точечный (шар на плоскости). Пара  – с геометрическим замыканием, а пара
– с геометрическим замыканием, а пара  требует силового замыкания.
требует силового замыкания.
Таблица 1. Возможные комбинации независимых вращательных (В)
и поступательных (П) движений в кинематических парах