Эд в электрике что это
Словарь: С. Фадеев. Словарь сокращений современного русского языка. — С.-Пб.: Политехника, 1997. — 527 с.
ЭД
ЭД
в маркировке смол
в маркировке
Пример использования
ЭД
ФЦП «Электронная Россия»
Источник: http://www.e-rus.ru/events/2003/08/141826_7397.shtml
ЭД
Источник: http://www.e-rus.ru/comments/2003/09/101227_8024.shtml
Источник: http://www.mbxxs.ru/Data/ipays_dog.doc
ЭД
Словарь: С. Фадеев. Словарь сокращений современного русского языка. — С.-Пб.: Политехника, 1997. — 527 с.
ЭД
Пример использования
ЭД
электронная документация;
документация в электронной форме
ЭД
Словарь: С. Фадеев. Словарь сокращений современного русского языка. — С.-Пб.: Политехника, 1997. — 527 с.
Источник: http://www.e-rus.ru/events/2003/08/111841_7332.shtml
Источник: http://www.docflow.ru/project_full.asp?param=3014
ЭД
ЭД
Словарь: С. Фадеев. Словарь сокращений современного русского языка. — С.-Пб.: Политехника, 1997. — 527 с.
ЭД
ЭД
атомная пром., мед.
Источник: http://www.mednovosti.by/journal.aspx?article=2078
ЭД
ЭД
социальная некоммерческая программа
Санкт-Петербург
ЭД
ЭД
Источник: http://www.rusmedserv.com/epidinf/m-dokl/25.htm
ЭД
Источник: http://na-senovale.ru/for_men/
Словарь сокращений и аббревиатур . Академик . 2015 .
Принцип действия и устройство электродвигателя
Любой электрический двигатель предназначен для совершения механической работы за счет расхода приложенной к нему электроэнергии, которая преобразуется, как правило, во вращательное движение. Хотя в технике встречаются модели, которые сразу создают поступательное движение рабочего органа. Их называют линейными двигателями.
В промышленных установках электромоторы приводят в действие различные станки и механические устройства, участвующие в технологическом производственном процессе.
Внутри бытовых приборов электродвигатели работают в стиральных машинах, пылесосах, компьютерах, фенах, детских игрушках, часах и многих других устройствах.
Конструктором первого электродвигателя считается физик Питер Барлоу, представивший в 1822 году свое изобретение, позже названное Колесом Барлоу. Это решение не подходило для практического применения, но оно показало, как электричество может управлять простым механизмом.

Основные физические процессы и принцип действия
На движущиеся внутри магнитного поля электрические заряды, которые называют электрическим током, всегда действует механическая сила, стремящаяся отклонить их направление в плоскости, расположенной перпендикулярно ориентации магнитных силовых линий. Когда электрический ток проходит по металлическому проводнику или выполненной из него катушке, то эта сила стремится подвинуть/повернуть каждый проводник с током и всю обмотку в целом.
На картинке ниже показана металлическая рамка, по которой течет ток. Приложенное к ней магнитное поле создает для каждой ветви рамки силу F, создающую вращательное движение.
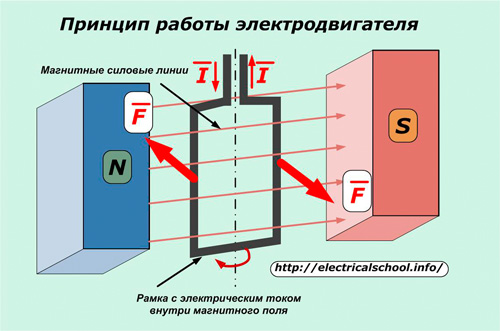
Это свойство взаимодействия электрической и магнитной энергии на основе создания электродвижущей силы в замкнутом токопроводящем контуре положено в работу любого электродвигателя. В его конструкцию входят:
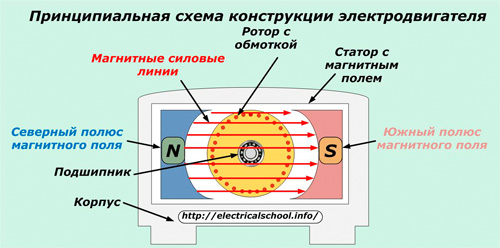
- обмотка, по которой протекает электрический ток. Ее располагают на специальном сердечнике-якоре и закрепляют в подшипниках вращения для уменьшения противодействия сил трения. Эту конструкцию называют ротором;
- статор, создающий магнитное поле, которое своими силовыми линиями пронизывает проходящие по виткам обмотки ротора электрические заряды;
- корпус для размещения статора. Внутри корпуса сделаны специальные посадочные гнезда, внутри которых вмонтированы внешние обоймы подшипников ротора.
Упрощенно конструкцию наиболее простого электродвигателя можно представить картинкой следующего вида.
При вращении ротора создается крутящий момент, мощность которого зависит от общей конструкции устройства, величины приложенной электрической энергии, ее потерь при преобразованиях.
Величина максимально возможной мощности крутящего момента двигателя всегда меньше приложенной к нему электрической энергии. Она характеризуется величиной коэффициента полезного действия.
По виду протекающего по обмоткам тока их подразделяют на двигатели постоянного или переменного тока. Каждая из этих двух групп имеет большое количество модификаций, использующих различные технологические процессы.
Электродвигатели постоянного тока
У них магнитное поле статора создается стационарно закрепленными постоянными магнитами либо специальными электромагнитами с обмотками возбуждения. Обмотка якоря жестко вмонтирована в вал, который закреплен в подшипниках и может свободно вращаться вокруг собственной оси.
Принципиальное устройство такого двигателя показано на рисунке.
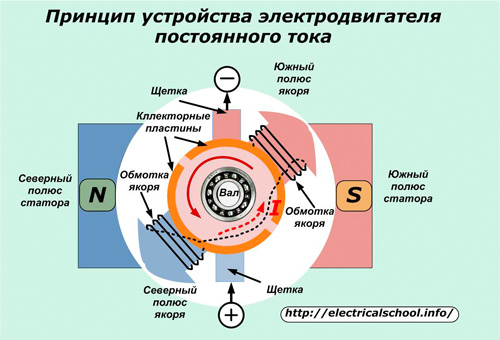
На сердечнике якоря из ферромагнитных материалов расположена обмотка, состоящая из двух последовательно соединенных частей, которые одним концом подключены к токопроводящим коллекторным пластинам, а другим скоммутированы между собой. Две щетки из графита расположены на диаметрально противоположных концах якоря и прижимаются к контактным площадкам коллекторных пластин.
На нижнюю щетку рисунка подводится положительный потенциал постоянного источника тока, а на верхнюю — отрицательный. Направление протекающего по обмотке тока показано пунктирной красной стрелкой.
Ток вызывает в нижней левой части якоря магнитное поле северного полюса, а в правой верхней — южного (правило буравчика). Это приводит к отталкиванию полюсов ротора от одноименных стационарных и притяжению к разноименным полюсам на статоре. В результате приложенной силы возникает вращательное движение, направление которого указывает коричневая стрелка.
При дальнейшем вращении якоря по инерции полюса переходят на другие коллекторные пластины. Направление тока в них изменяется на противоположное. Ротор продолжает дальнейшее вращение.
Простая конструкция подобного коллекторного устройства приводит к большим потерям электрической энергии. Подобные двигатели работают в приборах простой конструкции или игрушках для детей.
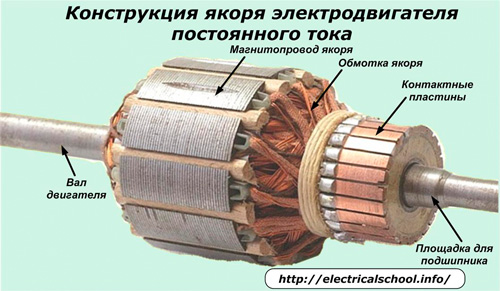
Электродвигатели постоянного тока, участвующие в производственном процессе, имеют более сложную конструкцию:
- обмотка секционирована не на две, а на большее количество частей;
- каждая секция обмотки смонтирована на своем полюсе;
- коллекторное устройство выполнено определенным количеством контактных площадок по числу секций обмоток.
В результате этого создается плавное подключение каждого полюса через свои контактные пластины к щеткам и источнику тока, снижаются потери электроэнергии.
Устройство подобного якоря показано на картинке.
У электрических двигателей постоянного тока можно реверсировать направление вращения ротора. Для этого достаточно изменить движение тока в обмотке на противоположное сменой полярности на источнике.
Электродвигатели переменного тока
Они отличаются от предыдущих конструкций тем, что электрический ток, протекающий в их обмотке, описывается по синусоидальному гармоническому закону, периодически изменяющему свое направление (знак). Для их питания напряжение подается от генераторов со знакопеременной величиной.
Статор таких двигателей выполняется магнитопроводом. Его делают из ферромагнитных пластин с пазами, в которые помещают витки обмотки с конфигурацией рамки (катушки).

На картинке ниже показан принцип работы однофазного двигателя переменного тока с синхронным вращением электромагнитных полей ротора и статора.
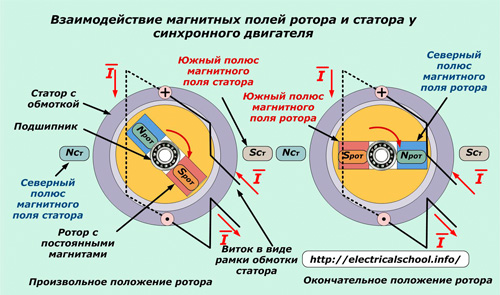
В пазах статорного магнитопровода по диаметрально противоположным концам размещены проводники обмотки, схематично показанные в виде рамки, по которой протекает переменный ток.
Рассмотрим случай для момента времени, соответствующего прохождению положительной части его полуволны.
В обоймах подшипника свободно вращается ротор с вмонтированным постоянным магнитом, у которого ярко выражены северный «N рот» и южный «S рот» полюса. При протекании положительной полуволны тока по обмотке статора в ней создается магнитное поле с полюсами «S ст» и «N ст».
Между магнитными полями ротора и статора возникают силы взаимодействия (одноименные полюса отталкиваются, а разноименные — притягиваются), которые стремятся повернуть якорь электродвигателя из произвольного положения в окончательное, когда осуществляется максимально близкое расположение противоположных полюсов относительно друг друга.
Если рассматривать этот же случай, но для момента времени, когда по рамочному проводнику протекает обратная — отрицательная полуволна тока, то вращение якоря будет происходить в противоположную сторону.
Для придания непрерывного движения ротору в статоре делают не одну обмотку-рамку, а определенное их количество с таким учетом, чтобы каждая их них питалась от отдельного источника тока.
Принцип работы трехфазного двигателя переменного тока с синхронным вращением электромагнитных полей ротора и статора показан на следующей картинке.
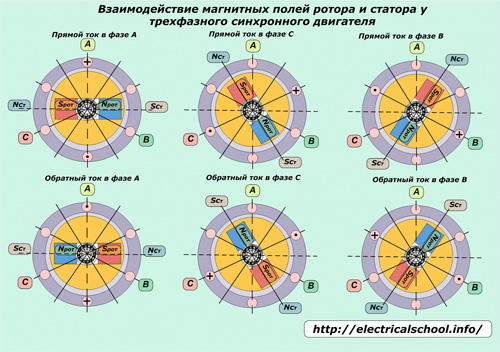
В этой конструкции внутри магнитопровода статора смонтированы три обмотки А, В и С, смещенные на углы 120 градусов между собой. Обмотка А выделена желтым цветом, В — зеленым, а С — красным. Каждая обмотка выполнена такими же рамками, как и в предыдущем случае.
На картинке для каждого случая ток проходит только по одной обмотке в прямом или обратном направлении, которое показано значками «+» и «-».
При прохождении положительной полуволны по фазе А в прямом направлении ось поля ротора занимает горизонтальное положение потому, что магнитные полюса статора формируются в этой плоскости и притягивают подвижный якорь. Разноименные полюса ротора стремятся приблизиться к полюсам статора.
Когда положительная полуволна пойдет по фазе С, то якорь повернется на 60 градусов по ходу часовой стрелки. После подачи тока в фазу В произойдет аналогичный поворот якоря. Каждое очередное протекание тока в очередной фазе следующей обмотки будет вращать ротор.
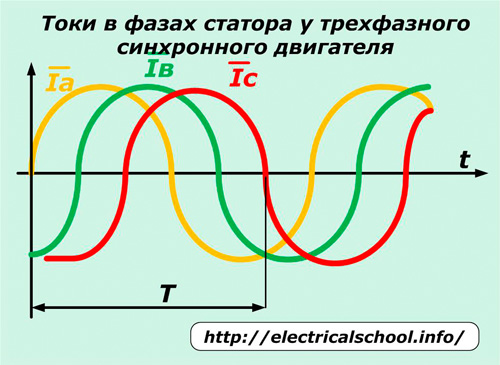
Если к каждой обмотке подвести сдвинутое по углу 120 градусов напряжение трехфазной сети, то в них будут циркулировать переменные токи, которые раскрутят якорь и создадут его синхронное вращение с подведенным электромагнитным полем.
Эта же механическая конструкция успешно применяется в трехфазном шаговом двигателе . Только в каждую обмотку с помощью управления специальным контроллером (драйвером шагового двигателя) подаются и снимаются импульсы постоянного тока по описанному выше алгоритму.
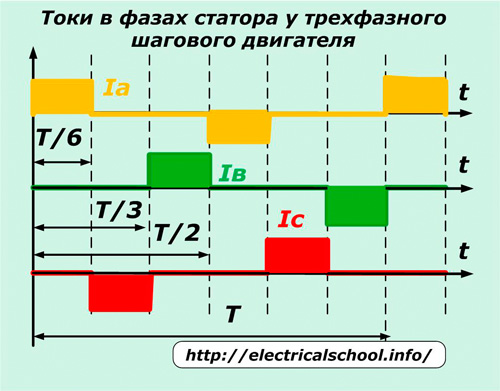
Их запуск начинает вращательное движение, а прекращение в определенный момент времени обеспечивает дозированный поворот вала и остановку на запрограммированный угол для выполнения определенных технологических операций.
В обеих описанных трехфазных системах возможно изменение направления вращения якоря. Для этого надо просто поменять чередование фаз «А»-«В»-«С» на другое, например, «А»-«С»-«В».
Скорость вращения ротора регулируется продолжительностью периода Т. Его сокращение приводит к ускорению вращения. Величина амплитуды тока в фазе зависит от внутреннего сопротивления обмотки и значения приложенного к ней напряжения. Она определяет величину крутящего момента и мощности электрического двигателя.
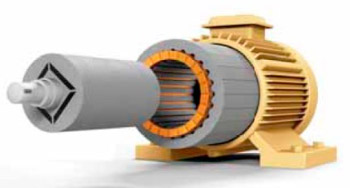
Эти конструкции двигателей имеют такой же статорный магнитопровод с обмотками, как и в ранее рассмотренных однофазных и трехфазных моделях. Они получили свое название из-за несинхронного вращения электромагнитных полей якоря и статора. Сделано это за счет усовершенствования конфигурации ротора.
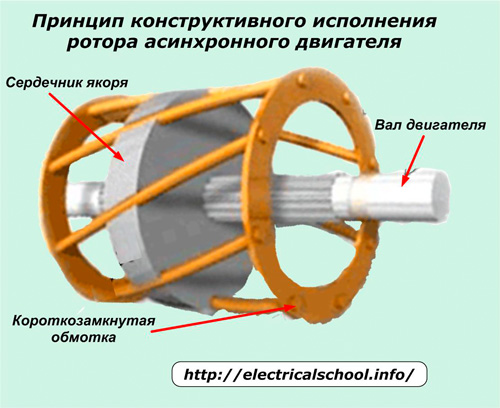
Его сердечник набран из пластин электротехнических марок стали с пазами. В них вмонтированы алюминиевые либо медные тоководы, которые по концам якоря замкнуты токопроводящими кольцами.
Когда к обмоткам статора подводится напряжение, то в обмотке ротора электродвижущей силой наводится электрический ток и создается магнитное поле якоря. При взаимодействии этих электромагнитных полей начинается вращение вала двигателя.
У этой конструкции движение ротора возможно только после того, как возникло вращающееся электромагнитное поле в статоре и оно продолжается в несинхронном режиме работы с ним.
Асинхронные двигатели проще в конструктивном исполнении. Поэтому они дешевле и массово применяются в промышленных установках и бытовой домашней технике.

Взрывозащищенный электродвигатель ABB
Многие рабочие органы промышленных механизмов выполняют возвратно-поступательное или поступательное движение в одной плоскости, необходимое для работы металлообрабатывающих станков, транспортных средств, ударов молота при забивании свай …
Перемещение такого рабочего органа с помощью редукторов, шариковинтовых, ременных передач и подобных механических устройств от вращательного электродвигателя усложняет конструкцию. Современное техническое решение этой проблемы — работа линейного электрического двигателя.
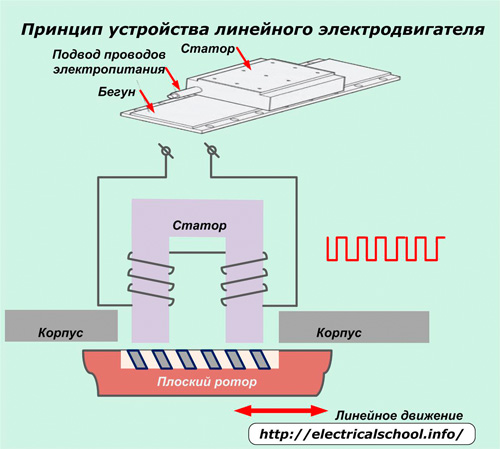
У него статор и ротор вытянуты в виде полос, а не свернуты кольцами, как у вращательных электродвигателей.
Принцип работы заключается в придании возвратно-поступательного линейного перемещения бегуну-ротору за счет передачи электромагнитной энергии от неподвижного статора с незамкнутым магнитопроводом определенной длины. Внутри него поочередным включением тока создается бегущее магнитное поле.
Оно воздействует на обмотку якоря с коллектором. Возникающие в таком двигателе силы перемещают ротор только в линейном направлении по направляющим элементам.
Линейные двигатели конструируются для работы на постоянном или переменном токе, могут работать в синхронном либо асинхронном режиме.
Недостатками линейных двигателей являются:
- сложность технологии;
- высокая стоимость;
- низкие энергетические показатели.
Телеграмм канал для тех, кто каждый день хочет узнавать новое и интересное: Школа для электрика
Если Вам понравилась эта статья, поделитесь ссылкой на неё в социальных сетях. Это сильно поможет развитию нашего сайта!
Не пропустите обновления, подпишитесь на наши соцсети:
Обозначения выводов трехфазного короткозамкнутого электродвигателя

В настоящее время встречаются две основные схемы обозначения выводов обмоток электродвигателей:
— система в соответствии с ГОСТ183-74, применяется на электродвигателях разработанных до 1987г.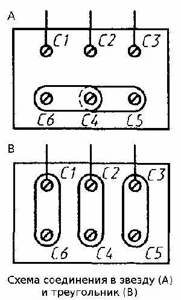
— система в соответствии с ГОСТ26772-85, которая соответствует международным стандартам.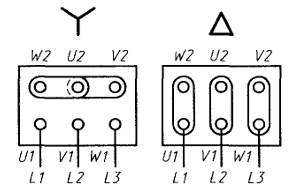
В соответствии с первой системой выводы обмоток статора обозначаются буквой «С» и цифрой, которой пронумерованы начала и концы фаз: первая фаза — С1 и С4, вторая — С2 и С5, третья — С3 и С6. Нейтраль — О.
Допускается обозначать выводы обмоток статора изоляцией разного цвета: первая фаза — желтый (С1), желтый с черным (С4), вторая фаза — зеленый (С2), зеленый с черным (С5), третья фаза — красный (С3), красный с черным (С6). Нейтраль — черный.
В соответствии с международными стандартами в настоящее время выводы обозначают латинскими буквами: первая фаза обмотки статора — U, вторая — V, третья — W. Начало и конец фазы обозначают цифрами: 1 и 2. Нейтраль — N.
Цветовые обозначения такие же как описаны выше.
Обозначения должны наносится непосредственно на концы выводов или на колодку зажимов рядом с выводами.
В случае если соединения фаз сделаны внутри корпуса двигателя, то начала и концы фаз не обозначают, а наносят только буквенные обозначения без цифр.
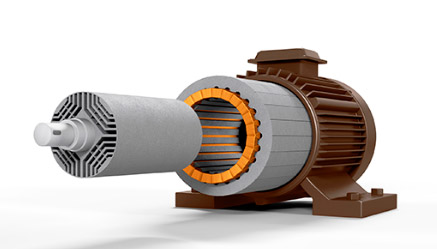
Синхронный электродвигатель
Синхронный двигатель – тип электрических машин с равной частотой вращения вала и крутящегося магнитного поля неподвижного узла. За счет относительно сложной конструкции такие двигатели не так распространены, как асинхронные двигатели, однако, в некоторых случаях являются практически незаменимыми.
Рассмотрим конструкцию синхронных электродвигателей, их преимущества и недостатки.
Принцип работы
Принцип действия синхронных электрических машин основан на сцеплении крутящегося магнитного поля статора и постоянного магнитного поля ротора.
При этом концепция та же, что у асинхронного двигателя: при подаче трехфазного напряжения на обмотки неподвижного узла, сдвинутые на 1200, возникает магнитное поле с попеременно меняющимися полюсами.
При этом на обмотки ротора подается постоянный ток, который наводит постоянное магнитное поле.
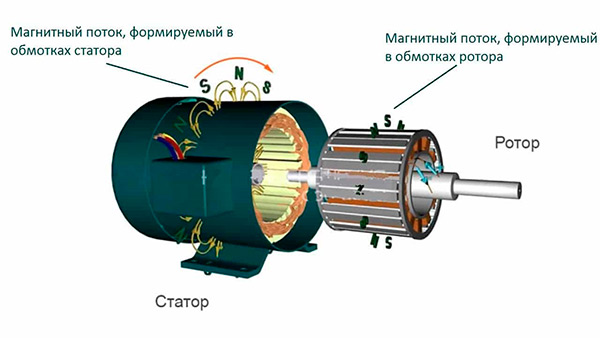
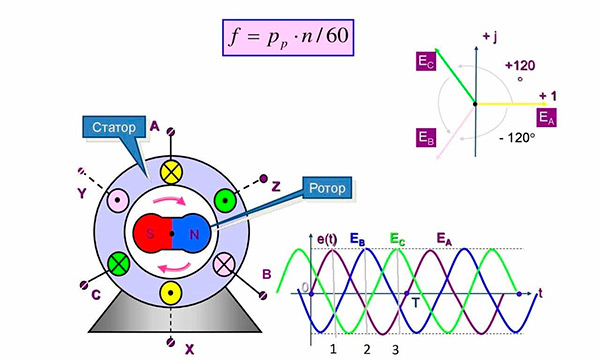
При подаче переменного трехфазного напряжения на статор и постоянного тока на ротор, разноименные полюса магнитного поля ротора будут притягиваться к соответствующим полюсам вращающегося поля статора. При таком взаимодействии возникает крутящий момент, который вращает вал. При этом его скорость будет равна частоте вращающегося магнитного поля, наводимого обмотками неподвижного узла. Наглядно принцип действия синхронных электрических машин представлен на рисунке ниже.
Конструкция и виды синхронных двигателей
Синхронные двигатели с роторными обмотками – самые распространенные электрические машины такого типа. Силовые агрегаты состоят из следующих основных узлов:
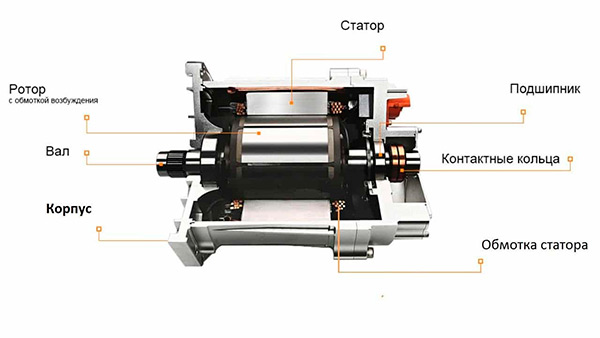
- Станины и корпуса. Элементы конструкции предназначены для размещения других узлов и опоры.
- Статора. Неподвижная часть включает сердечник и трехфазные обмотки переменного тока.
- Ротора. Вращающийся узел состоит из магнитопровода с уложенной в нем обмотки постоянного тока.
- Вала. Элемент конструкции предназначен для подключения механической нагрузки, на нем также размещены катушки возбуждения.
- Контактных колец. Узлы предназначены для подачи постоянного напряжения на обмотки ротора.
Конструкция синхронных двигателей может различаться в зависимости от вида. Например, в электрических машинах типа СДПМ для создания магнитного поля применяют постоянные магниты, такие электродвигатели также не имеют электрических колец. Различают роторы явно и неявнополюсной конструкции. Первые применяют в двигателях приводов низкооборотистого оборудования, работающего при значительной нагрузке.
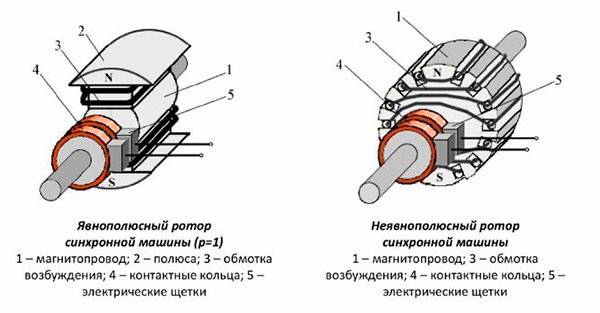
Электродвигатели с неявнополюсным вращающимся узлом используют в скоростных приводах. По конструкции статора различают синхронные электрические машины с распределенной (на рисунке слева) и сосредоточенной обмоткой (на рисунке справа).

В асинхронных двигателях ЭДС вращающегося узла наводится под воздействием магнитного поля статора. Вследствие этого возникает разница между скоростями вращения магнитного поля и ротора, называемая скольжением. Синхронные электрические машины не имеют скольжения, благодаря чему такие двигатели можно применять в приводах точных механизмов.
К преимуществам синхронных двигателей с роторными обмотками также относят высокую перегрузочную способность, увеченный к.п.д (может достигать до 95%), пропорциональную зависимость момента на валу от питающего напряжения, стабильную скорость при переменной нагрузке. К недостаткам синхронных машин относят относительную сложность конструкции, наличие источника постоянного тока для обмотки возбуждения, сложность пусковой схемы.
Способы пуска и возбуждения синхронных двигателей
Синхронные машины требуют источник постоянного тока для питания обмотки ротора. Наибольшее распространение получили статические системы возбуждения на базе тиристорных преобразователей. Системы с генератором постоянного тока на валу электродвигателя уже практически не применяют.
Электропитание тиристорных возбудителей осуществляется от трансформатора, включенного в одну сеть с двигателем. Системы позволяют регулировать напряжение, коэффициент мощности, величину реактивной составляющей обмоток статора.
Синхронные электрические машины не могут запускаться прямым включением в сеть, так как смена полюсов вращающегося магнитного поля происходит слишком быстро, из-за инерции разгон ротора до синхронной скорости невозможен.
Существует несколько схем пуска электродвигателей синхронного типа.
Двигательный. Запуск синхронного двигателя осуществляется за счет разгона ротора до синхронной частоты при помощи вспомогательной электрической машины. При этом электродвигатель включается в сеть после достижения синхронной частоты, после чего вспомогательный двигатель останавливают. Двигательные схемы считаются морально устаревшими, из-за высокой стоимости и значительных габаритов и массы их уже практически не применяют.
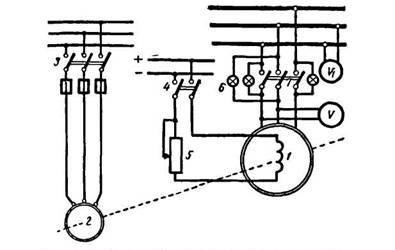
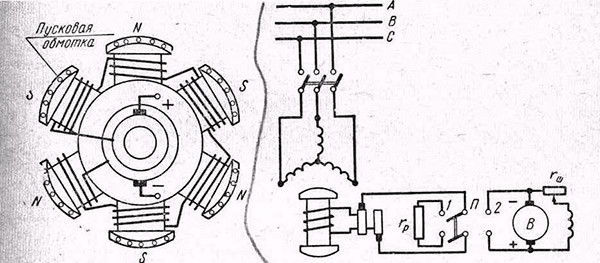
Асинхронный. Синхронные двигатели с асинхронным стартом имеют дополнительную обмотку типа «беличья клетка» на полюсных наконечниках ротора. Пуск электродвигателя осуществляется при отсутствии постоянного тока в обмотке возбуждения, как у асинхронных электрических машин. После разгона до скорости, близкой к синхронной, на роторную катушку подают постоянный ток, двигатель начинает работать в синхронном режиме. Во время старта, до входа в синхронизм, роторную обмотку замыкают на сопротивление, это необходимо для ограничения тока, наводимого полем статора при пуске и разгоне. Такой метод позволяет осуществлять запуск синхронной машины напрямую от сети. К недостаткам относят значительный пусковой ток, затруднение старта под нагрузкой.
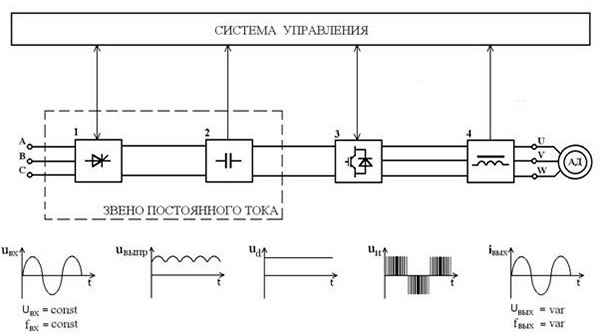
Частотный. При этом электродвигатель подключают к частотному преобразователю. Пуск электрической машины осуществляется путем подачи напряжения низкой частоты и плавного ее увеличения до номинального значения, двигатель все время работает в режиме синхронизма. Такой способ позволяет уменьшить время переходных процессов и пусковые токи, снизить тепловые нагрузки, осуществлять пуск синхронных электрических машин под нагрузкой. Недостатком способа является относительно высокая цена специализированного преобразователя частоты. Частотный пуск – наиболее перспективный, он позволяет устранить многие недоставки синхронных электрических машин.
Типы синхронных электродвигателей
Электрические силовые агрегаты с синхронной частотой вращения применяют для решений приводов самого различного назначения: оборудования для инженерных систем и промышленности, бытовых и производственных механизмов. Кроме электрических машин с роторными обмотками, существует еще несколько типов синхронных двигателей. Рассмотрим их типы и конструкцию подробнее.
Двигатели с постоянными магнитами
Конструкция СДПМ напоминает синхронные двигатели с обмотками ротора. Главное отличие – наличие постоянных магнитов на вращающейся части вместо обмоток. Электродвигатели с постоянными магнитами не требуют источника постоянного тока для питания обмотки возбуждения.
- Упрощенная в сравнении синхронным двигателем с обмотками ротора конструкция.
- Увеличенный к.п.д.
- Улучшенное отношение масса/мощность.
- Возможность точного управления моментом и скоростью.
СДПМ имеют более высокую стоимость, что несколько ограничивает их использование. Область применения электрических машин – приводы средней и малой мощности.
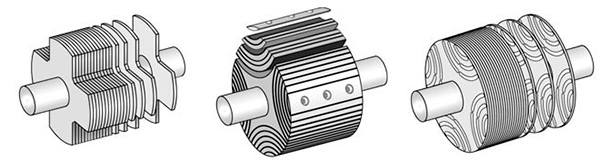
Синхронный реактивный двигатель
Вращение вала таких электродвигателей осуществляется за счет разности магнитной проводимости ротора в поперечной и продольной плоскости. Чем больше эти значения отличаются, тем выше крутящий момент на валу электрической машины. Конструкция статора реактивных электродвигателей не отличается от стандартных синхронных электрических машин с распределенной или сосредоточенной трехфазной обмоткой.
Варианты конструкции крутящейся части: с явновыраженными полюсами (слева), аксиально-расслоенная (по середине) и поперечно-расслоенная (справа).
Синхронный реактивный двигатель обладает следующими достоинствами:
- Простая конструкция ротора без магнитов и обмоток.
- Небольшой нагрев.
- Низкая инеркцинность.
- Возможность задания скорости в широком диапазоне.
К недостаткам электрических машин относят невысокий коэффициент мощности. Область применения таких двигателей – приводы маломощного оборудования и механизмов.
Гистерезисный двигатель
Принцип действия гистерезисных электрических машин основан на явлении гитерезиса магнитовтвердых материлов. Крутящий момент возникает под действием остаточного намагничивания ротора, которое осуществляется магнитным полем статора электродвигателя, в остальном принцип работы электродвиагателей сходен с СДПМ.
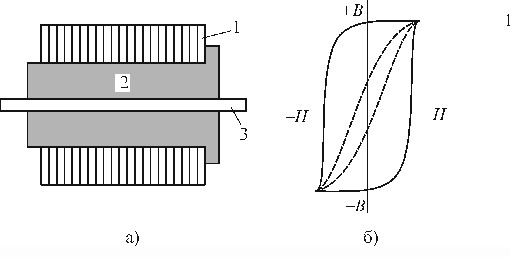
Вращающаяся часть гистерезисных двигателей имеет неявнополюсную сборуную конструкцию. К приемуществам электрических машин относятся:
- Простой старт без дополнительной аппаратуры.
- Отсутвие высоких пусковых токов.
- Плавный вход в синхронный режим.
- Простая конструкция.
- Более высокий коэффициент мощности чем у реактивных синхронных двигателей.
К недостаткам относят высокую цену, которая обсуловлена стоимостью магнитотвердых материалов с широкой петлей гистерезиса для ротора.
Реактивно-гистерезисный электродвигатель
Реактивно-гистерезисный двигатели – тип синхронных электрических машин с явнополюсным ротаторном. Пуск осуществляется за счет крутящего момента, возникающего при взаимодействии вращающегося магнитного поля статора и гистерезиса ротора.

Дальнейшая работа двигателя в синхронном режиме – за счет реактивного момента и остаточного намагничивания. Таким образом, двигатели совмещают достоинства реактивных и гистерезисных электрических машин:
- Простота конструкции.
- Самозапуск без дополнительного оборудования.
- Возможность работы от однофазной электросети.
К недостаткам относятся низкие КПД и cosφ. Область применения реактивно-гистерезисных двигателей: микроприводы различного назначения.