Что понимают под первичным измерительным преобразователем
Основы автоматического регулирования
1.7 Первичные преобразователи. Датчики
Первичные приборы, датчики или первичные преобразователи предназначены для непосредственного преобразования измеряемой величины в другую величину, удобную для измерения или использования. Выходными сигналами первичных приборов, датчиков являются как правило унифицированные стандартизованные сигналы, в противном случае используются нормирующие преобразователи (см. рис.1.8).
Различают генераторные, параметрические и механические преобразователи:
- Генераторные осуществляют преобразование различных видов энергии в электрическую, то есть они генерируют электрическую энергию (термоэлектрические, пьезоэлектрические, электрикинетические, гальванические и др. датчики).
- К параметрическим относятся реостатные, тензодатчики, термосопротивления и т.п. Данным приборам для работы необходим источник энергии.
- Выходным сигналом механических первичных преобразователей (мембранных, манометров, дифманометров, ротаметров и др.) является усилие, развиваемое чувствительным элементом под действием измеряемой величины
Основные структурные схемы подключения первичных преобразователей:
Рисунок 1.8 — Основные структурные схемы подключения первичных преобразователей
Пояснения к рисунку 1.8.
Первичный преобразователь, датчик Д может иметь выходной унифицированный сигнал см.рис.1.8.а и неунифицированный сигнал см.р ис.1.8.б. Во втором случае используют нормирующие преобразователи НП.
Нормирующий преобразователь НП выполняет следующие функции: преобразует нестандартный неунифицированный сигнал (например, mV, Ом) в стандартный унифицированный выходной сигнал; осуществляет фильтрацию входного сигнала; осуществляет линеаризацию статической характеристики датчика; применительно к термопаре, осуществляет температурную компенсацию холодного спая.
Нормирующий преобразователь НП применяется, также в следующих случаях: когда необходимо подать сигнал измеряемой величины на несколько измерительных или регулирующих приборов; а также когда необходимо передать сигнал на большие расстояния, например сигнал от термопары передается на малые расстояния — до 10м, а унифицированный сигнал постоянного тока может передаваться на большие расстояния — до 100м.
В современных промышленных регуляторах нормирующий преобразователь НП как правило является обязательной составной частью входного устройства регулятора.
1.7.1 Первичные преобразователи для измерения температуры:
По термодинамическим свойствам, используемым для измерения температуры, можно выделить следующие типы термометров:
4. Первичные измерительные преобразователи
Все измерения начинаются с восприятия измеряемых величин и формирования измерительного сигнала, который затем подвергается необходимым преобразованиям. Под восприятием величин подразумевается свойство датчиков выделить и представить входную величину в виде измерительного устройства, удобного для дальнейших действий над нею. Подавляющее число физических неэлектрических величин в процессе измерения преобразуется в электрические величины. Для осуществления подобных преобразований находят широкое применение различные первичные измерительные преобразователи (ПИП). Функцию восприятия входной величины выполняет чувствительный элемент. При этом идентифицируется природа величины и происходит процесс ее восприятия. Чувствительный элемент – это часть измерительного преобразователя в измерительной цепи, воспринимающая входную величину [24]. Основой чувствительных элементов является вещество (материал), которое воспринимает входную физическую величину и в котором с помощью определенного физического эффекта входная величина преобразуется в сигнал, поступающий в последующую измерительную цепь. Измерительная цепь может включать усилители, делители, модуляторы и другие устройства преобразования измерительного сигнала. Следует отметить, что первичный измерительный преобразователь может находиться в измерительной цепи любого средства измерений и необязательно должен быть датчиком. В общем случае под датчиком следует понимать конструктивно обособленную совокупность первичных преобразователей,воспринимающую одну или несколько входных величин и преобразующую их в измерительные сигналы. В дальнейшем при рассмотрении измерительных устройств, воспринимающих входную физическую величину и преобразующих ее в измерительный сигнал, будут использоваться терминыпервичный измерительный преобразователь(ПИП) идатчик.
Рассмотрим общие характеристики первичных измерительных преобразователей вне зависимости от их физической природы. Метрологические характеристики средств измерений установлены ГОСТ 8.009-84. В п. 1.4 рассмотрены некоторые из общих характеристик СИ, к которым относятся и первичные измерительные преобразователи. В литературе, кроме рассмотренных ранее характеристик, для описания статических характеристик ПИП широко используются такие понятия как: передаточная функция или уравнение (функция, статическая характеристика) преобразования; диапазон измеряемых или преобразуемых значений (максимальный входной сигнал); диапазон выходных значений; точность; гистерезис; нелинейность; воспроизводимость; разрешающая способность; мертвая зона и др.
Передаточная функция – это идеальное (теоретическое) выражение, устанавливающее взаимосвязь между выходным сигналом датчика Y и внешним (входным) воздействием Х: Y = f(X). Эта взаимосвязь может быть представлена либо в виде таблицы, либо в виде графика, либо в виде математического выражения.
Одномерная передаточная функция – функция, связывающая выходной сигнал только с одним внешним воздействием (одним входным сигналом).
Многомерная передаточная функция – функция, связывающая выходной сигнал несколькими внешними воздействиями.

Примером датчика с одномерной передаточной функцией может являться терморезистивный датчик, а примером датчика с двумерной передаточной функцией является инфракрасный датчик температуры, у которого выходной сигнал (напряжение) связан с измеряемой абсолютной температурой Тх соотношением , где С – константа; Тs – абсолютная температура поверхности чувствительного элемента [20].
Погрешности СИ, в том числе и ПИП, есть отклонения его реальной функции преобразования от номинальной (идеальной передаточной функции).
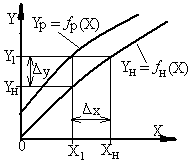
П
усть имеется ПИП с номинальной функцией преобразованияYН = fН (X) и реальной функцией преобразования YР = fР (X), приведенными на рис. 4.1. Если на выходе датчика наблюдается величина Y1, то, зная передаточную функцию YН = fН (X), можно считать, что на вход воздействует величина ХН, подсчитываемая из уравнения Y1 = fН (X), а фактически на выходе будет величина Х1. Величина ΔХ = ХН — Х1 называется погрешностью преобразователя ИП. Иногда ее называют погрешностью на входе. Зная реальную функцию преобразования YР = fР (X), можно перейти от погрешности преобразователя на входе ΔХ к погрешности преобразователя на выходе ΔY:
. (4.1)
Точность есть качество ПИП, отражающее близость к нулю его погрешность. Чем меньше погрешности имеет датчик, тем он считается более точным. Численно точность А определяется отношением значения измеряемой или преобразуемой величиныхк достигнутому при этом интервалу неопределенностиd= 2Δ, т.е. А =х/d= 1/(2γ).
Диапазон измеряемых (преобразуемых) значений ΔХ – это динамический диапазон внешних воздействий, который ПИП может воспринять. Эта величина определяет максимальное значение входного сигнала, которое ПИП (датчик) может преобразовать в выходной сигнал, не выходя за пределы допустимых погрешностей. Различают полный и рабочий диапазоны.
Полный диапазон– это диапазон значений входных воздействий, который датчик может преобразовать с погрешностью, не превышающей 100 %.
Рабочийдиапазон– это часть полного диапазона, в котором относительная погрешность не превышает некоторого заданного значения.
Диапазон выходных значений– алгебраическая разность между выходными сигналами, получаемыми при максимальном и минимальном входном воздействии.
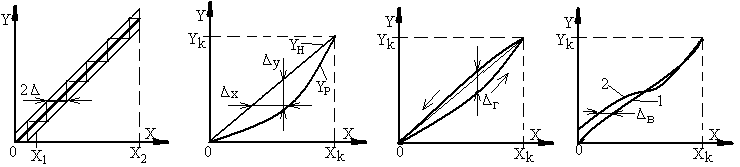
Разрешающая способность характеризует минимальное изменение измеряемой или преобразуемой величины, которое может почувствовать ПИП, и определяется как число градаций измеряемой или преобразуемой величины, различимое на выходе СИ. За различимые градации можно принять неперекрывающиеся интервалы, вписывающиеся в полосу неопределенности 2Δ преобразователя по всей ее длине (например, как показано на рис. 4.2а). Разрешающая способностьRСИ на интервале от Х1до Х2может быть определена по формуле
. (4.2)
Нелинейность– это максимальное отклонение реальной характеристики преобразования от аппроксимирующей прямой линии (рис. 4.2б).
Гистерезис– это разность значений выходного сигнала ПИП для одного и того же входного сигнала, полученных при его возрастании и убывании (рис. 4.2в).
Воспроизводимость– это способность ПИП при соблюдении одинаковых условий выдавать идентичные результаты. Воспроизводимость результатов определяется по максимальной разности выходных значений ПИП, полученных в двух циклах градуировки (рис. 4.2г), и обычно выражается в процентах от максимального значения входного сигнала [20]:
. (4.3)
Насыщение – это состояние датчика, когда при определенном уровне входного воздействия датчик перестает отвечать приведенной градуировочной характеристике.
Так как в любом средстве измерений сигналы, в том числе и входной сигнал, не могут распространяться с бесконечно большой скоростью, ПИП обладают не только статическими, но и динамическими характеристиками, т. е. параметрами, зависящими от времени. Взаимосвязь между входным воздействием и выходным сигналом ПИП (датчиков) можно описывать в виде линейных дифференциальных уравнений с постоянными коэффициентами, которые в зависимости от конструкции датчиков могут иметь разный порядок. Динамические характеристики СИ можно получить из решения таких уравнений.
К динамическим характеристикам датчиков относятся: операторная чувствительность, комплексная чувствительность, переходная характеристика, амплитудно-частотная и фазочастотная характеристики (АЧХ и ФЧХ) и др. Некоторые из этих характеристик определены в п. 1.4.
Если в датчике нет энергонакопительных элементов (конденсаторов, катушек индуктивностей, массы и т. п.), то такой датчик называется датчиком нулевого порядкас передаточной функцией

, (4.4)
где А0– постоянное смещение;S– статическая чувствительность.
Такие датчики относятся к СИ мгновенного действия и для них можно не определять динамические характеристики. На практике в реальных датчиках на очень высоких частотах чувствительность Sуменьшается, что может быть обусловлено наличием упругости, массы, паразитных емкостей и т. д. Поэтому такие датчики называют датчиками квазинулевого порядка. Примером такого датчика может являться реостатный датчик смещения (перемещения).
Датчики, содержащие один энергонакопительный элемент, описываются дифференциальным уравнением первого порядка
. (4.5)
Примером датчика первого порядка является терморезистивный датчик, в котором роль энергонакопительного элемента играет теплоемкость. Для описания динамических характеристик данных датчиков широко используются амплитудно-частотные и фазочастотные характеристики, граничная частота fСР, на которой выходной сигнал уменьшается на 3 дБ. Эта частота считается предельной рабочей частотой датчика и называетсячастотой среза. Она характеризует наибольшую или наименьшую частоту внешних воздействий (входной величины), которую датчик может воспринять без искажений [20].
При подаче на вход датчика первого порядка ступенчатого воздействия его переходная характеристика хорошо аппроксимируется экспонентой вида

, (4.6)
где Y0– установившееся значение выходного сигнала; τ – постоянная времени;t– время.
Постоянная времениτ – это время, в течение которого выходной сигнал датчика достигает уровня, составляющего приблизительно 63 % от установившегося значения при подаче на его вход ступенчатого внешнего воздействия. Постоянная времени является мерой инерционности датчика и в терминах электрических величин находится как τ =C . R. В тепловых терминах под С иRпонимаются теплоемкость и тепловое сопротивление.
На практике для установления τ или fдатчиков первого порядка можно использовать формулу [20]fСР= 0,159/τ.
Датчики, содержащие два энергонакопительных элемента, описываются дифференциальным уравнением второгопорядка

. (4.7)
Примером датчика второго порядка является акселерометр, в котором роль энергонакопительных элементов играют масса и пружина.
При подаче на вход датчика второго порядка ступенчатого воздействия на его выходе практически всегда появляются колебания. Любой датчик второго порядка характеризуется собственной (резонансной) частотой, на которой происходит значительное увеличение выходного сигнала. Обычно рабочий диапазон датчиков выбирается либо значительно ниже собственной частоты (на 60 % и более), либо выше ее, кроме тех датчиков, для которых резонансная частота является рабочей. Для датчиков второго порядка необходимо указывать значение собственной частоты и егокоэффициент затухания, который может быть определен как отношение большей амплитуды к меньшей амплитуде пары последовательно взятых полуволн колебаний относительно установившегося значения.
Кроме метрологических характеристик при эксплуатации средств измерения важно знать и неметрологические характеристики: показатели надежности, электрическую прочность, сопротивление изоляции, устойчивость к климатическим и механическим воздействиям, время установления рабочего режима, экономичность и др.
Что понимают под первичным измерительным преобразователем
П ервичные приборы, датчики или первичные преобразователи предназначены для непосредственного преобразования измеряемой величины в другую величину, удобную для измерения или использования. Выходными сигналами первичных приборов, датчиков являются как правило унифицированные стандартизованные сигналы, в противном случае используются нормирующие преобразователи (см. рис.1).
- Генераторные осуществляют преобразование различных видов энергии в электрическую, то есть они генерируют электрическую энергию (термоэлектрические, пьезоэлектрические, электрикинетические, гальванические и др. датчики).
- К параметрическим относятся реостатные, тензодатчики, термосопротивления и т.п. Данным приборам для работы необходим источник энергии.
- Выходным сигналом механических первичных преобразователей (мембранных, манометров, дифманометров, ротаметров и др.) является усилие, развиваемое чувствительным элементом под действием измеряемой величины.
Рисунок 1 — Основные структурные схемы подключения первичных преобразователей
Пояснения к рисунку 1. Первичный преобразователь, датчик Д может иметь выходной унифицированный сигнал см.рис.1.8.а и неунифицированный сигнал см.рис.1.8.б. Во втором случае используют нормирующие преобразователи НП.
Нормирующий преобразователь НП выполняет следующие функции: преобразует нестандартный неунифицированный сигнал (например, mV, Ом) в стандартный унифицированный выходной сигнал; осуществляет фильтрацию входного сигнала; осуществляет линеаризацию статической характеристики датчика; применительно к термопаре, осуществляет температурную компенсацию холодного спая.
Нормирующий преобразователь НП применяется, также в следующих случаях: когда необходимо подать сигнал измеряемой величины на несколько измерительных или регулирующих приборов; а также когда необходимо передать сигнал на большие расстояния, например сигнал от термопары передается на малые расстояния — до 10м, а унифицированный сигнал постоянного тока может передаваться на большие расстояния — до 100м. В современных промышленных регуляторах нормирующий преобразователь НП как правило является обязательной составной частью входного устройства регулятора.
Первичные преобразователи для измерения температуры:
- термометры расширения, основанные на свойстве температурного расширения жидких и твердых тел;
- термометры газовые и жидкостные манометрические;
- термометры конденсационные;
- электрические термометры (термопары);
- термометры сопротивления;
- оптические монохроматические пирометры;
- оптические цветовые пирометры;
- радиационные пирометры.
Первичные преобразователи для измерения давления:
- жидкостные (основанные на уравновешивании давления столбом жидкости);
- поршневые (измеряемое давление уравновешивается внешней силой, действующей на поршень);
- пружинные (давление измеряется по величине деформации упругого элемента);
- электрические (основанные на преобразовании давления в какую-либо электрическую величину).
- манометры (измерение избыточного давления);
- вакуумметры (измерение давления разряжения);
- мановакуумметры (измерение как избыточного давления, так и давления разряжения);
- напорометры (для измерения малых избыточных давлений);
- тягомеры (для измерения малых давлений, разряжений, перепадов давлений);
- тягонапорометры;
- дифманометры (для измерения разности или перепада давлений);
- барометры (для измерения барометрического давления).
Первичные преобразователи для измерения расхода пара, газа и жидкости:
П риборы, измеряющие расход, называются расходомерами. Эти приборы могут быть снабжены счетчиками (интеграторами), тогда они называются расходомерами-счетчиками. Такие приборы позволяют измерять расход и количество вещества.
- Механические: Объемные: ковшовые, барабанного типа, мерники. Скоростные: по методу переменного или постоянного перепада давления, напорные трубки, ротационные.
- Электрические: электромагнитные, ультразвуковые, радиоактивные.
Первичные преобразователи для измерения уровня:
П од измерением уровня понимается индикация положения раздела двух сред различной плотности относительно какой-либо горизонтальной поверхности, принятой за начало отсчета. Приборы, выполняющие эту задачу, называются уровнемерами. Методы измерения уровня: поплавковый, буйковый, гидростатический, электрический и др.
Д атчик, сенсор (от англ. sensor) — термин систем управления, первичный преобразователь, элемент измерительного, сигнального, регулирующего или управляющего устройства системы, преобразующий контролируемую величину в удобный для использования сигнал.
Общие сведения
Датчики являются элементом технических систем, предназначенных для измерения, сигнализации, регулирования, управления устройствами или процессами. Датчики преобразуют контролируемую величину (давление, температура, расход, концентрация, частота, скорость, перемещение, напряжение, электрический ток и т. п.) в сигнал (электрический, оптический, пневматический), удобный для измерения, передачи, преобразования, хранения и регистрации информации о состоянии объекта измерений.
Исторически и логически датчики связаны с техникой измерений и измерительными приборами, например термометры, расходомеры, барометры, прибор «авиагоризонт» и т. д. Обобщающий термин датчик укрепился в связи с развитием автоматических систем управления, как элемент обобщенной логической концепции датчик — устройство управления — исполнительное устройство — объект управления. Специальный случай представляет использование датчиков в автоматических системах регистрации параметров, например, в системах научных исследований.
Применение датчиков
В последнее время в связи с удешевлением электронных систем всё чаще применяются датчики со сложной обработкой сигналов, возможностями настройки и регулирования параметров и стандартным интерфейсом системы управления. Имеется определённая тенденция расширительной трактовки и перенесения этого термина на измерительные приборы, появившиеся значительно ранее массированного использования датчиков, а также по аналогии — на объекты иной природы, например, биологические. Понятие датчика по практической направленности и деталям технической реализации близко к понятиям измерительный инструмент и измерительный прибор, но показания этих приборов в основном читаются человеком, а датчики, как правило, используются в автоматическом режиме.
- виду выходных величин
- измеряемому параметру
- принципу действия
- характеру выходного сигнала
- количеству входных величин
- технологии изготовления
Первичные преобразователи. Датчики
Первичные приборы, датчики или первичные преобразователи предназначены длянепосредственного преобразования измеряемой величины в другую величину, удобную для измерения илииспользования. Выходными сигналами первичных приборов, датчиков являются как правилоунифицированные стандартизованные сигналы, в противном случае используются нормирующие преобразователи (см. рис.1).
Различают генераторные, параметрические и механические преобразователи:
- Генераторные осуществляют преобразование различных видов энергии в электрическую, то есть они генерируют электрическую энергию (термоэлектрические, пьезоэлектрические, электрикинетические, гальванические и др. датчики).
- К параметрическим относятся реостатные, тензодатчики, термосопротивления и т.п. Данным приборам для работы необходим источник энергии.
- Выходным сигналом механических первичных преобразователей (мембранных, манометров, дифманометров, ротаметров и др.) является усилие, развиваемое чувствительным элементом под действием измеряемой величины.
Рисунок 1 — Основные структурные схемы подключения первичных преобразователей
Пояснения к рисунку 1. Первичный преобразователь, датчик Д может иметь выходнойунифицированный сигнал см.рис.1.8.а и неунифицированный сигнал см.рис.1.8.б. Во втором случаеиспользуют нормирующие преобразователи НП.
Нормирующий преобразователь НП выполняет следующие функции: преобразует нестандартныйнеунифицированный сигнал (например, mV, Ом) в стандартный унифицированный выходной сигнал;осуществляет фильтрацию входного сигнала; осуществляет линеаризацию статической характеристикидатчика; применительно к термопаре, осуществляет температурную компенсацию холодного спая.
Нормирующий преобразователь НП применяется, также в следующих случаях: когда необходимоподать сигнал измеряемой величины на несколько измерительных или регулирующих приборов; а такжекогда необходимо передать сигнал на большие расстояния, например сигнал от термопары передается намалые расстояния — до 10м, а унифицированный сигнал постоянного тока может передаваться на большиерасстояния — до 100м.В современных промышленных регуляторах нормирующий преобразователь НП как правилоявляется обязательной составной частью входного устройства регулятора.
Первичные преобразователи для измерения температуры:
П о термодинамическим свойствам, используемым для измерения температуры, можно выделитьследующие типы термометров:
- термометры расширения, основанные на свойстве температурного расширения жидких и твердых тел;
- термометры газовые и жидкостные манометрические;
- термометры конденсационные;
- электрические термометры (термопары);
- термометры сопротивления;
- оптические монохроматические пирометры;
- оптические цветовые пирометры;
- радиационные пирометры.
Первичные преобразователи для измерения давления:
П о принципу действия:
- жидкостные (основанные на уравновешивании давления столбом жидкости);
- поршневые (измеряемое давление уравновешивается внешней силой, действующей на поршень);
- пружинные (давление измеряется по величине деформации упругого элемента);
- электрические (основанные на преобразовании давления в какую-либо электрическую величину).
По роду измеряемой величины:
- манометры (измерение избыточного давления);
- вакуумметры (измерение давления разряжения);
- мановакуумметры (измерение как избыточного давления, так и давления разряжения);
- напорометры (для измерения малых избыточных давлений);
- тягомеры (для измерения малых давлений, разряжений, перепадов давлений);
- тягонапорометры;
- дифманометры (для измерения разности или перепада давлений);
- барометры (для измерения барометрического давления).
Первичные преобразователи для измерения расхода пара, газа и жидкости:
П риборы, измеряющие расход, называются расходомерами. Эти приборы могут быть снабженысчетчиками (интеграторами), тогда они называются расходомерами-счетчиками. Такие приборы позволяютизмерять расход и количество вещества.
Классификация преобразователей для измерения расхода пара, газа и жидкости:
- Механические: Объемные: ковшовые, барабанного типа, мерники. Скоростные: по методу переменного или постоянного перепада давления, напорные трубки, ротационные.
- Электрические: электромагнитные, ультразвуковые, радиоактивные.
Первичные преобразователи для измерения уровня:
П од измерением уровня понимается индикация положения раздела двух сред различной плотностиотносительно какой-либо горизонтальной поверхности, принятой за начало отсчета. Приборы, выполняющиеэту задачу, называются уровнемерами.Методы измерения уровня: поплавковый, буйковый, гидростатический, электрический и др.
Популярное
- Проектирование АСУТП. Книга 2. Методическое пособие
- П-, ПИ-, ПД-, ПИД — регуляторы
- В мире АСУТП
- Показатели качества процесса управления
- Типовые звенья систем регулирования
- Законы регулирования: П, ПИ, ПИД
- Первичные преобразователи. Датчики
- Определение параметров переходных характеристик
- Передаточная функция
- Сигналы и стандарты
- Классификация систем автоматического регулирования
- Стадии и этапы создания АСУТП