Как проверить, сгорел ли драйвер?
В процессе эксплуатации драйвера шагового двигателя (или серводвигателя) при работе с фрезерно-гравировальным станок ЧПУ, координатно-фрезерным ЧПУ и другим оборудованием может возникнуть подозрение, что драйвер сгорел. В такой ситуации рекомендуется действовать следующим образом:
1. Отключить от драйвера все имеющиеся соединительные провода (питание, сигнальные провода, а также обмотки электродвигателя).
2. Воспользовавшись мультиметром, определить режим измерения сопротивления (Ом — диапазон измерения).
3. К контакту GND на драйвере следует подключить черный провод. Красный провод необходимо подключать поочередно к контактам обмоток электродвигателя. При этом необходимо следить за показаниями прибора.
В случае, если на одном из контактов значение сопротивления будет равно 0 Ом – в данном контакте сгорел силовой транзистор.
4. Черный провод необходимо подключить к контакту + (плюса) силового питания на драйвере шагового двигателя (серводвигателя). В случае, если на одном из контактов значение сопротивления будет равно 0 Ом – в данном контакте сгорел силовой транзистор.
Когда нужен ремонт
Если Ваши опасения подтвердились, и в драйвере сгорел силовой транзистор, необходимо обратиться в службу техподдержки. Драйвер отправляется на ремонт.
Что касается ремонта самих станков с ЧПУ, доверять эту работу следует только специализированным организациям, в штате которых есть специалисты соответствующей квалификации.
Сигналы управления драйвера ШД: PUL/DIR, STEP/DIR, CW/CCW. Управление шаговыми драйверами DM860H, DM556, TB6600. с Arduino.
ГЛАВНАЯ / КАтегории / Сигналы управления драйвера ШД: PUL/DIR, STEP/DIR, CW/CCW. Управление шаговыми драйверами DM860H, DM556, TB6600. с Arduino.
Общие сведения:
Шаговый двигатель это бесколлекторный двигатель, ротор которого вращается не плавно, а шагами (дискретно). Один оборот ротора (360°) состоит из определённого количества шагов. Количество полных шагов в одном обороте указывается в технической документации двигателя.
Например, ротор шагового двигателя 17HS1352-P4130, за один полный шаг, поворачивается на 1,8°. Значит для поворота ротора на 360° двигатель должен совершить 200 полных шагов.
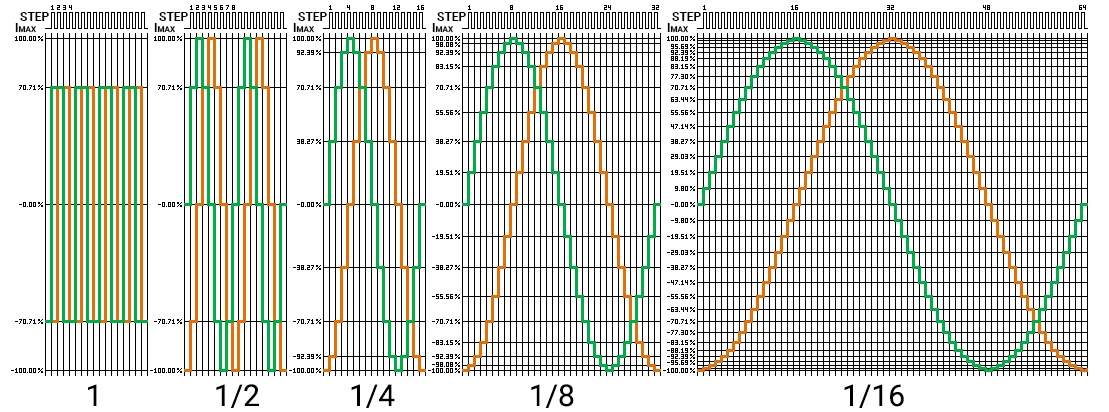
Для совершения одного полного шага на обмотки двигателя поступает серия сигналов от драйвера (как в полношаговом «1», так и в микрошаговых режимах «2», «4», «8», «16»).
С принципом работы шаговых двигателей можно ознакомиться в разделе Wiki — ШД.
Микрошаг:
Большинство драйверов позволяют разделить полный шаг двигателя на несколько микрошагов. Выбор микрошага устанавливается согласно таблице в инструкции к драйверу. В таблице указывается количество микрошагов на полный шаг «Microstep» (1/2/4/8/16/32/. ) и/или количество тактов на полный оборот вала «Pulse/rev» (200/400/800/1600/3200/6400/. ).
Если для целого поворота ротора двигателя в режиме 1 микрошаг на полный шаг требуется 200 тактов, то в режиме 4 микрошага на полный шаг, потребуется уже 800 тактов.
Чем больше микрошагов в полном шаге, тем точнее и плавнее поворачивается ротор шагового двигателя, но для поддержания той же скорости, требуется увеличивать частоту следования тактовых импульсов.
Ограничение тока фазы:
Большинство драйверов позволяют ограничить ток фазы (ток протекающий через обмотки двигателя). Выбор тока фазы осуществляется согласно таблице в инструкции к драйверу. В таблице указывается действующий ток «Current» и/или пиковый ток «PK Current». Чем выше ток, тем выше отдаваемый момент (сила двигателя).
Слишком большой ток приведёт к перегреву двигателя и может вызвать его поломку, а слишком маленький может привести к пропуску шагов, или нестабильному вращению ротора.
У некоторых драйверов ограничение тока осуществляется поворотом потенциометра.
Ток удержания:
Ток удержания это постоянный ток проходящий через обмотки двигателя, удерживающий вал в неподвижном состоянии. Некоторые драйверы позволяют снизить ток удержания.
Снижение тока удержания приводит к снижению нагрева двигателя при его удержании.
Силовые выводы драйвера:
Силовые выводы используются для подачи напряжения питания шагового двигателя и подключения его обмоток.
- Входы «VCC», «GND» / «+V», «GND» / «AC+», «AC-» — предназначены для получения напряжения питания шагового двигателя.
- Выводы «A+» и «A-» — предназначены для подключения первой обмотки шагового двигателя.
- Выводы «B+» и «B-» — предназначены для подключения второй обмотки шагового двигателя.
Подключение обмоток двигателя к драйверу зависит от количества выводов у двигателя.

Драйверы DM860H, DM556, TB6600 позволяют работать только с биполярными двигателями. Двигатели с 4 выводами подключаются по схеме А. Двигатели с 6 выводами подключаются по схеме Б или В. Двигатели с 8 выводами подключаются по схеме Г или Д.
Запрещается подключать или отключать обмотки двигателя на включенном драйвере!
Сигналы управления STEP/DIR (PUL/DIR):
- Вход драйвера «STEP» (он же «PULSE») — предназначен для получения тактовых импульсов. За один импульс ротор двигателя поворачивается на один микрошаг. Вход может работать по фронту или спаду импульса. Чем выше частота импульсов, тем выше скорость вращения ротора.
- Вход драйвера «DIR» — предназначен для выбора направления вращения двигателя («0» — в одну сторону, «1» — в другую сторону). Смена состояния вывода «DIR» должна осуществляться при отсутствии импульсов на выводе «STEP».
- Вход драйвера «ENABLE» — разрешает работу двигателя. У большинства драйверов данный вход является инверсным, работа двигателя разрешена при отсутствии напряжения на входе. Некоторые драйверы позволяют вообще не подключать этот вход. Если работа двигателя запрещена, то его обмотки электрически отключаются и вал двигателя не удерживается.
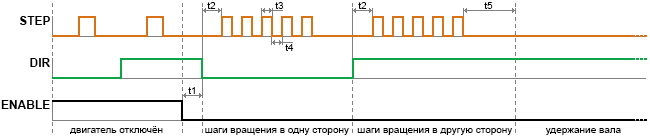
- Двигатель отключён если на входе «ENABLE» есть напряжение.
Сигналы на входах «STEP» и «DIR» игнорируются драйвером. Вал двигателя освобождён. - Вал поворачивается на один микрошаг с каждым импульсом на входе «STEP», при условии что на входе «ENABLE» нет напряжения.
Направление поворота вала зависит от состояния на входе «DIR». - Вал двигателя удерживается в неподвижном состоянии если на входе «ENABLE» нет напряжения и на вход «STEP» не подаются импульсы.
- t1: После снятия напряжения со входа «ENABLE» должно пройти не менее 5мкс до изменения уровня на входе «STEP» или «DIR».
- t2: После изменения состояния на входе «DIR» должно пройти не менее 5мкс до подачи импульса на вход «STEP».
- t3, t4: Длительность импульса или паузы на входе «STEP» не должна быть меньше 2,5мкс.
- t5: Автоматическое снижение тока удержания происходит через 1-2 сек после подачи последнего импульса на вход «STEP». Время зависит от типа драйвера.
Сигналы управления CW/CCW:
(Данные сигналы не поддерживаются драйверами DM860H, DM556, TB6600)
- Вход драйвера «CW» — предназначен для получения тактовых импульсов. За один импульс ротор двигателя поворачивается на один микрошаг. Вход может работать по фронту или спаду импульса. Чем выше частота импульсов, тем выше скорость вращения ротора.
- Вход драйвера «CCW» — выполняет те же действия что и вход «CW», но ротор двигателя поворачивается в другую сторону.
- Вход драйвера «ENABLE» — разрешает работу двигателя. У большинства драйверов данный вход является инверсным, работа двигателя разрешена при отсутствии напряжения на входе. Некоторые драйверы позволяют вообще не подключать этот вход. Если работа двигателя запрещена, то его обмотки электрически отключаются и вал двигателя не удерживается.
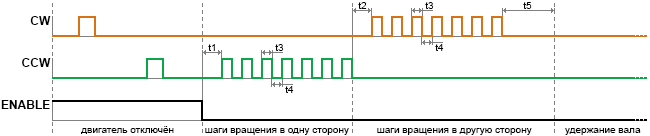
- Двигатель отключён если на входе «ENABLE» есть напряжение.
Сигналы на входах «CW» и «CCW» игнорируются драйвером. Вал двигателя освобождён. - Вал поворачивается на один микрошаг с каждым импульсом на входе «CW» или «CCW», при условии что на входе «ENABLE» нет напряжения.
Направление поворота вала зависит от того, на какой вход поступают импульсы. - Вал двигателя удерживается в неподвижном состоянии если на входе «ENABLE» нет напряжения и на входы «CW» и «CCW» не подаются импульсы.
- t1: После снятия напряжения со входа «ENABLE» должно пройти не менее 5мкс до подачи импульса на вход «CW» или «CCW».
- t2: После последнего импульса на одном входе должно пройти не менее 5мкс до подачи импульса на дрогой вход.
- t3, t4: Длительность импульса или паузы не должна быть меньше 2,5мкс.
- t5: Автоматическое снижение тока удержания происходит через 1-2 сек после подачи последнего импульса. Время зависит от типа драйвера.
Подключение управляющих выводов драйвера:
Для подключения управляющих выводов можно использовать одну их следующих схем:
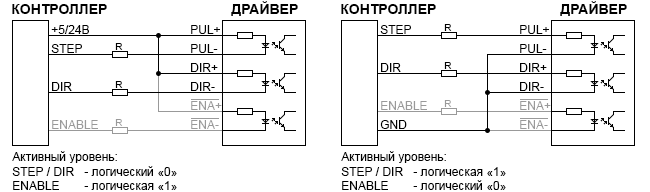
Допускается подключать драйвер к контроллеру без использования сигнала ENABLE, тогда выводы ENA+ и ENA- остаются свободными (не подключёнными).
- При уровне логической «1» = 5В, все сопротивления R исключаются из схемы.
- При уровне логической «1» = 12В, все сопротивления R равны 1кОм.
- При уровне логической «1» = 24В, все сопротивления R равны 2кОм.
Подключение драйвера к Arduino:
Так как логические уровни Arduino UNO равны 5В, то при подключении управляющих выводов к драйверу, ограничивающие сопротивления R не нужны.
Для подключения драйвера к Arduino воспользуемся схемой где выводы PUL-, DIR-, ENA- подключены к GND контроллера (правая схема на картинке выше).
Если подключить драйвер к Arduino без использования сигнала ENABLE, оставив выводы ENA+ и ENA- не подключёнными, то приведённый ниже скетч не сможет освобождать вал. Вал двигателя будет удерживаться всё время, пока он не вращается.
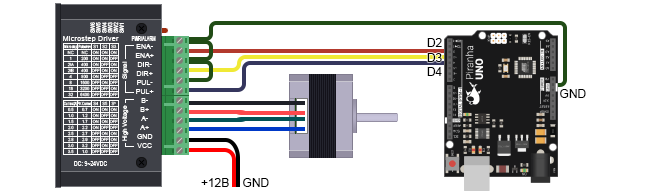
Выводы драйвера ENA+, DIR+ и PUL+ можно подключить к любым выводам Arduino, их номера указываются в начале скетча. В примере это выводы 2, 3 и 4 соответственно.
Если для подключения драйвера воспользоваться схемой где выводы PUL+, DIR+, ENA+ подключены к 5V контроллера (левая схема на картинке выше), то в скетче нужно изменить логические уровни устанавливаемые функциями digitalWrite().
Управление двигателем при помощи Arduino:
Для работы скетча установите микрошаг 1/4, что соответствует 800 тактов на 1 оборот. Микрошаг устанавливается DIP-переключателями драйвера согласно таблице на его корпусе.
Скетч постоянно повторяет 4 действия:
- Поворот вала на 2 полных оборота в одну сторону.
- Остановка двигателя на 5 секунд с удержанием вала.
- Поворот вала на 2 полных оборота в другую сторону.
- Остановка двигателя на 5 секунд с освобождением вала.
const uint8_t pin_ENA = 2; // Вывод Arduino подключённый к входу драйвера ENA+. const uint8_t pin_DIR = 3; // Вывод Arduino подключённый к входу драйвера DIR+. const uint8_t pin_PUL = 4; // Вывод Arduino подключённый к входу драйвера PUL+. // Вывод GND Arduino соединён с входами драйвера ENA-, DIR-, PUL-. uint32_t f = 1000; // Определяем частоту следования микрошагов от 1 до 200'000 Гц. // Чем выше частота, тем выше скорость вращения вала. void setup() < // pinMode( pin_ENA, OUTPUT ); // Конфигурируем вывод Arduino как выход. pinMode( pin_DIR, OUTPUT ); // Конфигурируем вывод Arduino как выход. pinMode( pin_PUL, OUTPUT ); // Конфигурируем вывод Arduino как выход. >// // uint32_t t = 1000000/f/2; // Определяем длительность импульсов t3 и пауз t4 в мкс. // void loop() < // // Готовимся к движению вала: // digitalWrite( pin_ENA, 0 ); // Разрешаем работу двигателя. delayMicroseconds(5); // Выполняем задержку t1 (см. график STEP/DIR). digitalWrite( pin_DIR, 0 ); // Выбираем направление вращения. delayMicroseconds(5); // Выполняем задержку t2 (см. график STEP/DIR). // Поворачиваем вал на 2 оборота: // for(int i=0; i// // Останавливаем вал удерживая его: // Двигатель не вращается, если на вывод PUL не поступают импульсы. delay(5000); // Ждём 5 секунд. В это время двигатель остановлен, его вал удерживается. // Меняем направление движения вала: // digitalWrite( pin_DIR, 1 ); // Меняем логический уровень вывода DIR с 0 на 1. delayMicroseconds(5); // Выполняем задержку t2 (см. график STEP/DIR). // Поворачиваем вал на 2 оборота: // for(int i=0; i // // Останавливаем вал без удержания: // digitalWrite( pin_ENA, 1 ); // Запрещаем работу двигателя, отключаем токи в обмотках. delay(5000); // Ждём 5 секунд. В это время двигатель отключен, его вал свободен. > //
- Движение вала на 2 оборота в одну сторону:
Перед началом движения вала мы разрешаем работу двигателя (установив 0 на выводе ENA) и выбираем направление движения (установив 0 или 1 на вывод DIR), далее выполняем движение подачей импульсов на вывод PUL в теле цикла for. Каждый импульс поворачивает ротор на угол одного микрошага. Микрошаг установлен DIP-переключателями в положение 800 тактов на полный оборот. Код цикла выполняется 1600 раз, значит вал повернётся на 2 оборота. - Остановка вала с удержанием:
Двигатель не вращается, если на вывод PUL не поступают импульсы. Значит обычная задержка на 5000 мс приведёт к остановке двигателя на 5 секунд. Так как работа двигателя была разрешена (на выводе ENA ранее был установлен 0), то через обмотки двигателя будет протекать ток удержания вала. - Движение вала на 2 оборота в другую сторону:
Направление движения вала определяется логическим уровнем на выводе DIR. Ранее на нём был установлен 0, значит теперь нужно установить 1. Далее подачей импульсов на вывод PUL мы заставляем вращаться вал, но теперь в другую сторону. - Остановка вала без удержания:
В предыдущий раз мы останавливали двигатель прекращая подавать импульсы на вывод PUL, но не запрещали работу двигателя, в результате через его обмотки протекал ток удержания вала. Теперь мы запретим работу двигателя установив на выводе ENA уровень логической 1, что приведёт к исчезновению токов в обмотках двигателя. Теперь в течении 5 секунд, двигатель будет не только остановлен, но и его вал можно свободно вращать руками.
Управление шаговым двигателем по прерываниям от 2 таймера Arduino:
const uint8_t pin_ENA = 2; // Вывод Arduino подключённый к входу драйвера ENA+. const uint8_t pin_DIR = 3; // Вывод Arduino подключённый к входу драйвера DIR+. const uint8_t pin_PUL = 4; // Вывод Arduino подключённый к входу драйвера PUL+. // Вывод GND Arduino соединён с входами драйвера ENA-, DIR-, PUL-. volatile uint32_t step=0; // Переменная хранит количество микрошагов, которые требуется совершить. // void setup() < // pinMode( pin_ENA, OUTPUT ); // Конфигурируем вывод Arduino как выход. pinMode( pin_DIR, OUTPUT ); // Конфигурируем вывод Arduino как выход. pinMode( pin_PUL, OUTPUT ); // Конфигурируем вывод Arduino как выход. funcSetTimer2( 1000 ); // Запускаем 2 таймер указав частоту следования микрошагов от 1 до 200'000 Гц. >// Чем выше частота, тем выше скорость вращения вала. // void loop() < // // Готовимся к движению вала: // digitalWrite( pin_ENA, 0 ); // Разрешаем работу двигателя. delayMicroseconds(5); // Выполняем задержку t1 (см. график STEP/DIR). digitalWrite( pin_DIR, 0 ); // Выбираем направление вращения. delayMicroseconds(5); // Выполняем задержку t2 (см. график STEP/DIR). // Поворачиваем вал на 2 оборота: // step=1600; // Указываем количество микрошагов, которые требуется совершить. while(step)// Ждём обнуления переменной. // Останавливаем вал удерживая его: // Двигатель не вращается, если на вывод PUL не поступают импульсы. delay(5000); // Ждём 5 секунд. В это время двигатель остановлен, его вал удерживается. // Меняем направление движения вала: // digitalWrite( pin_DIR, 1 ); // Меняем логический уровень вывода DIR с 0 на 1. delayMicroseconds(5); // Выполняем задержку t2 (см. график STEP/DIR). // Поворачиваем вал на 2 оборота: // step=1600; // Указываем количество микрошагов, которые требуется совершить. while(step) // Ждём обнуления переменной. // Останавливаем вал без удержания: // digitalWrite( pin_ENA, 1 ); // Запрещаем работу двигателя, отключаем токи в обмотках. delay(5000); // Ждём 5 секунд. В это время двигатель отключен, его вал свободен. > // // // ОБРАБОТКА ПРЕРЫВАНИЙ 2 ТАЙМЕРА: // ISR(TIMER2_COMPA_vect) < // Функция вызывается по совпадению регистров TCNT2 и OCR2A. if( step )< // Если требуется выполнять микрошаги, то . bool p = digitalRead(pin_PUL); // Определяем текущее состояние на выводе PUL. digitalWrite(pin_PUL, !p); // Меняем состояние на выводе PUL. if( p )< step--; >// Уменьшаем количество требуемых микрошагов. > // > // // // ФУНКЦИЯ НАСТРОЙКИ 2 ТАЙМЕРА: // void funcSetTimer2(uint32_t f)< // Параметр: «f» - частота тактирования ШД от 1 до 200'000 Гц. if(f>200000) // Определяем значение предделителя: uint16_t i; uint8_t j; f*=2; if(f>(F_CPU/255/ 1))else if(f>(F_CPU/255/ 8))else if(f>(F_CPU/255/ 32))else if(f>(F_CPU/255/ 64))else if(f>(F_CPU/255/128))else if(f>(F_CPU/255/256))else // Устанавливаем регистры 2 таймера: TCCR2A = 0<
Как только переменной step присваивается число отличное от 0, то на драйвер начинают поступать импульсы. Значение step убывает с каждым поданным импульсом, пока не достигнет 0, что приведёт к остановке вала двигателя. Частота подачи импульсов в Гц указывается функцией funcSetTimer2().
В данном скетче мы ждём завершение вращения вала проверяя значение step в цикле while, вместо этого можно выполнять другие действия, например, опрашивать концевики, датчики, измерять пройденное расстояние и т.д.
Код работает на Arduino UNO, Pro Mini, Nano, Mega.
Ссылки
- Шаговые двигатели.
- Драйвер шагового двигателя, TB6600 (4.0А).
- Драйвер шагового двигателя DM556 (5.6A).
- Драйвер шагового двигателя DM860H (7.2A).
- Wiki — Шаговые двигатели.
Arduino.ru
как проверить, что не работает из пары шаговый мотор 28byj-48 и драйвер uln2003?
- Войдите на сайт для отправки комментариев
26 ответов [Последнее сообщение]
Втр, 05/07/2016 — 16:21
Зарегистрирован: 20.06.2016
Был в наборе шаговый двигатель с драйвером 28byj-48 и uln2003, наконец добрались руки поэксперементировать, но сразу возникла проблема — ни на один из тестовых скетчей в различных конфигурациях двигатель не реагирует, светодиодики не загараются.
Пробовал и на разные порты ардуины подключать и 3 разных библиотеки и бнез библиотеки и с отдельным питанием и с питанием от МЕГИ — никакой реакции. Микросхему вытащил-вставил, по двигателю пальцем пощелкал .
Не подскажете, как без покупки второгокомплекта проверить работоспособность?
- Войдите на сайт для отправки комментариев
Втр, 05/07/2016 — 16:31
Зарегистрирован: 20.01.2015
Для начала проверить сопротивление обмоток ШД, но он скорее всего в порядке. Потом показать как подключаете — скорее всего неправильно. Ну и неработающий скетч тоже не помешает показать.
- Войдите на сайт для отправки комментариев
Втр, 05/07/2016 — 16:36
Зарегистрирован: 20.06.2016
Подключаю к цифровым выводам 8,9,10,11 соответственно, выводы IN1, IN2, IN3, IN4
Питание, либо с выводов Ардуины либо с блока питания на макетной плате к контактам — + на драйвере. Джампер рядом с контактами замкнут. Мотор по-другому не вставить, у него разъем соединения с драйвером.
Скетч, например, такой:
// Bounce.pde // -*- mode: C++ -*- // // Make a single stepper bounce from one limit to another // // Copyright (C) 2012 Mike McCauley // $Id: Random.pde,v 1.1 2011/01/05 01:51:01 mikem Exp mikem $ #include // Define a stepper and the pins it will use #define HALFSTEP 8 #define motorPin1 8 //IN1 #define motorPin2 9 //IN2 #define motorPin3 10 //IN3 #define motorPin4 11 //IN4 AccelStepper stepper(HALFSTEP, motorPin1, motorPin2, motorPin3, motorPin4); void setup() < // Change these to suit your stepper if you want stepper.setMaxSpeed(1000); stepper.setAcceleration(100); stepper.setSpeed (200); stepper.moveTo(5000); >void loop() < // If at the end of travel go to the other end if (stepper.distanceToGo() == 0) stepper.moveTo(-stepper.currentPosition()); stepper.run(); >
- Войдите на сайт для отправки комментариев
Втр, 05/07/2016 — 16:39
Зарегистрирован: 20.06.2016
Пробовал вот такой скетч:
const int motorPin1 =8; const int motorPin2 =9; const int motorPin3 =10; const int motorPin4 =11; void setup() < // initialize the digital pin as an output. // Pin 13 has an LED connected on most Arduino boards: pinMode(motorPin1, OUTPUT); pinMode(motorPin2, OUTPUT); pinMode(motorPin3, OUTPUT); pinMode(motorPin4, OUTPUT); >void loop() < // HALF STEP int motorDelay=5; digitalWrite(motorPin1, HIGH); digitalWrite(motorPin2, LOW); digitalWrite(motorPin3, HIGH); digitalWrite(motorPin4, LOW); delay(motorDelay); digitalWrite(motorPin1, HIGH); digitalWrite(motorPin2, LOW); digitalWrite(motorPin3, HIGH); digitalWrite(motorPin4, HIGH); delay(motorDelay); digitalWrite(motorPin1, HIGH); digitalWrite(motorPin2, LOW); digitalWrite(motorPin3, LOW); digitalWrite(motorPin4, HIGH); delay(motorDelay); digitalWrite(motorPin1, HIGH); digitalWrite(motorPin2, HIGH); digitalWrite(motorPin3, LOW); digitalWrite(motorPin4, HIGH); delay(motorDelay); digitalWrite(motorPin1, LOW); digitalWrite(motorPin2, HIGH); digitalWrite(motorPin3, LOW); digitalWrite(motorPin4, HIGH); delay(motorDelay); digitalWrite(motorPin1, LOW); digitalWrite(motorPin2, HIGH); digitalWrite(motorPin3, HIGH); digitalWrite(motorPin4, HIGH); delay(motorDelay); digitalWrite(motorPin1, LOW); digitalWrite(motorPin2, HIGH); digitalWrite(motorPin3, HIGH); digitalWrite(motorPin4, LOW); delay(motorDelay); digitalWrite(motorPin1, HIGH); digitalWrite(motorPin2, HIGH); digitalWrite(motorPin3, HIGH); digitalWrite(motorPin4, LOW); delay(motorDelay); >
/* ULNStepper Library Library to use with controller ULN2003 for stepper motors. Created by A. Carpini, 24 April 2015. Contact: [email protected] — Demo Sketch — */ #include // Connect a ULN2003 controller to digital pin 8,9,10 and 11 of Arduino // Connect to ULN2003 controller board a motor step with 200 steps per // revolution (1.8 degree) ULNStepper motor(200, 8, 9, 10, 11); void setup() < // set up Serial library at 9600 bps Serial.begin(9600); Serial.println("Stepper test!"); // set motor speed to 10 rpm motor.setSpeed(10); >void loop()
Никакой реакции. Плюс еще много разныхз с библиотеками и без. Видимо, что-то не в порядке с железом, хотя, не хотелось бы.
- Войдите на сайт для отправки комментариев
Втр, 05/07/2016 — 20:20
Зарегистрирован: 23.02.2015
Звук есть какой-нибудь. Если есть, то Скорее всего надо номера пинов переставить в скетче без библиотеки. Пользуюсь подобным.
- Войдите на сайт для отправки комментариев
Втр, 05/07/2016 — 20:27
Зарегистрирован: 20.06.2016
нет звуков никаких и светодиоды не горят
- Войдите на сайт для отправки комментариев
Втр, 05/07/2016 — 21:04
Зарегистрирован: 23.02.2015
Можно подавать сигналы на пины и тестером смотреть как проходят. Там схема простейшая. На рин подаешь «хай» и соответсвующая ножка улнки должна конец обмотки замкнуть на землю. Если нет звуков от двигателя , нет контакта на землю.
- Войдите на сайт для отправки комментариев
Пнд, 13/03/2017 — 11:50
Зарегистрирован: 13.03.2017
Чтобы новую тему не создавать напишу здесь.
Та же пробелма что и у автора — не робит. Мультиметром меряю напряжение — на пинах проходит 5 V в соответствии со скетчем. На питании выдает постоянно 5V. На контактах штекера (который с ключом) — 0,6 V постоянно. Диоды не горят. Что еще можно проверить?
- Войдите на сайт для отправки комментариев
Пнд, 13/03/2017 — 12:07
Зарегистрирован: 02.09.2016
масса общая?, с unl2003 насколько помлю не + появляется а -, на мотор на центральном проводе должен быть + на остальные от микрухи — ,
- Войдите на сайт для отправки комментариев
Пнд, 13/03/2017 — 13:13
Зарегистрирован: 13.03.2017
Эм..а для чайников? 🙂
Куда ткнуть красным щупом, а куда черным?
- Войдите на сайт для отправки комментариев
Ср, 31/05/2017 — 00:49
Зарегистрирован: 31.05.2017
Та же проблема! Долго искал подобную тему, т.е. людей у которых та же ситуация. Во всех форумах, примерах и описаниях как подключать NEMA И ARDUINO, используется красный L298N ( чёрт подери, словно все сговорились. ). В общем в моей ситуации используется «Robotdyn driver motor L298N». Подключил в точности как описано в текстах на примере ( мучаюсь 3-е сутки ), как и автор этой дискусии опробовал разные методы: подключал с разных источников питания, менял провода местами и т.д. п. т. Единственное чего я добился, это ВНИМАНИЕ! : ВКЛ. «logic on» и задействовал 4-е пина (IN 1 E1 E2 IN3 ), воткнул в эти D8 D9 D10 D11 И ЗАГРУЗИЛ СКЕТЧ «Stepper». в итоге мотор «замурчал» тихо тихо и загорелись лампочки движения на драйвере. Короче «ЖОПА»
- Войдите на сайт для отправки комментариев
Выход из строя драйвера двигателя


- Пол: Мужчина
- Город: Н.Новгород
- Из:Н.Новгород
Отправлено 14 Июль 2008 — 12:14
С чем может быть связан выход из строя драйвера двигателя? У кого есть опыт откликнитесь.
Знаю технику безопасности как свои три пальца.Эксперт — это существо, которое перестало мыслить, ибо оно знает!В мире еще много граблей, на которые не ступала нога человека.
Пожалуйста! Исправляйте мои глупые ошибки (но оставьте мои умные ошибки)!
#2  OFFLINE _NEON_
OFFLINE _NEON_

- Пол: Мужчина
- Город: г. Анапа
- Интересы: Компьютеры, роботы и много подобных электронных вещей!
- Из:г. Анапа
Отправлено 15 Июль 2008 — 08:47
Привет! Было такое дело! Это связанно с перегрузкой станка (или станок работал на высокой скорости или на высокой скорости под нагрузкой!). драйвер перегрелся и вышел из строя. у меня было такое по неопытности, сейчас стараюсь задавать оптимальные параметры.
#3 OFFLINE vv92
- Пол: Мужчина
- Город: Н.Новгород
- Из:Н.Новгород
Отправлено 15 Июль 2008 — 11:22
Спасибо NEON, но мне казалось, что драйвер тупо отдает выставленный ток, а шаговик при повышенных нагрузках просто прошагивает. Попробую замерить сопротивление обмоток (правда думаю правильней рабочий ток).
Знаю технику безопасности как свои три пальца.Эксперт — это существо, которое перестало мыслить, ибо оно знает!В мире еще много граблей, на которые не ступала нога человека.
Пожалуйста! Исправляйте мои глупые ошибки (но оставьте мои умные ошибки)!
#4 OFFLINE _NEON_
- Пол: Мужчина
- Город: г. Анапа
- Интересы: Компьютеры, роботы и много подобных электронных вещей!
- Из:г. Анапа
Отправлено 16 Июль 2008 — 08:09
У тебя причина попроще . А мне приходилось на ремонт таскать, в телемастерскую. там хоть и впервый раз это чудо видели, но всё равно сделали.
Прикрепленные изображения
#5 OFFLINE vv92
- Пол: Мужчина
- Город: Н.Новгород
- Из:Н.Новгород
Отправлено 16 Июль 2008 — 12:42
У меня он сгорел, заменю на новый по гарантии, но хотелось бы понять из-за чего сгорел.
Знаю технику безопасности как свои три пальца.Эксперт — это существо, которое перестало мыслить, ибо оно знает!В мире еще много граблей, на которые не ступала нога человека.
Пожалуйста! Исправляйте мои глупые ошибки (но оставьте мои умные ошибки)!
#6 ONLINE 3D-BiG

- Пол: Мужчина
- Город: Ареал обитания — вся страна, но обычно встречаюсь в Новосибирске.
- Интересы: Полежать на диване, пофлудить на форуме.
- Из:СССР
Отправлено 17 Июль 2008 — 12:33
Чаще всего выходят из-за производственного брака, или из-за малого технологического запаса по параметрам (мы его используем при предельных напряжениях и токе — во время резкого торможения индуктивный выброс на шаговом двигателе — вот и умерли выходные каскады. ). Лучше, когда у нас на приводах не используются предельные параметры. Может также выйти по входной цепи, если на входную оптопару дали больший ток, чем положено, тогда светодиоду оптопары — кирдык. но здесь будет ток удержания на моторе, а или по направлению нет отработки, или по шагам.
Лужу, паяю, станки ЧПУ починяю.
Еще частенько здесь болтаю: Телеграм сообщество ЧПУшников: t.me/cncunion
#7 OFFLINE vv92
- Пол: Мужчина
- Город: Н.Новгород
- Из:Н.Новгород
Отправлено 18 Июль 2008 — 13:23
Сгорел очередной драйвер, после 15 миотной работы. Так, что скорее всего не брак драйвера. А работает он похоже на пределе, при заявленном напряжении питания 28-40 В, на нем 40В и есть, на двух остальных по 36-37В. Для надежной работы двигателя хорошо, а для драйвера-смерть. Жду связку: двигатель, драйвер, блок питания. Починю, раскажу.
Знаю технику безопасности как свои три пальца.Эксперт — это существо, которое перестало мыслить, ибо оно знает!В мире еще много граблей, на которые не ступала нога человека.
Пожалуйста! Исправляйте мои глупые ошибки (но оставьте мои умные ошибки)!
#8 OFFLINE vv92
- Пол: Мужчина
- Город: Н.Новгород
- Из:Н.Новгород
Отправлено 20 Июль 2008 — 23:05
Расковыряли драйвер-выгорела часть, формирующяя его питание, так что понижаем входное напряжение и работаем.
Знаю технику безопасности как свои три пальца.Эксперт — это существо, которое перестало мыслить, ибо оно знает!В мире еще много граблей, на которые не ступала нога человека.
Пожалуйста! Исправляйте мои глупые ошибки (но оставьте мои умные ошибки)!
#9 OFFLINE vv92
- Пол: Мужчина
- Город: Н.Новгород
- Из:Н.Новгород
Отправлено 22 Июль 2008 — 17:13
Интересно, до какой температуры может нагреваться драйвер, чтобы не выйти из строя?
Знаю технику безопасности как свои три пальца.Эксперт — это существо, которое перестало мыслить, ибо оно знает!В мире еще много граблей, на которые не ступала нога человека.
Пожалуйста! Исправляйте мои глупые ошибки (но оставьте мои умные ошибки)!
#10 OFFLINE Buzl

- Пол: Мужчина
- Город: СССР, Пенза
- Из:USSR, Komsomolsk-on-Amure
Отправлено 22 Июль 2008 — 18:16
пока запах не пойдет.
#11 OFFLINE vv92
- Пол: Мужчина
- Город: Н.Новгород
- Из:Н.Новгород
Отправлено 22 Июль 2008 — 23:02
Вопрос не празный, двигатели спокойно переносят нагрев до 80 град., а на многих драйверах стоят мощные радиаторы и вентиляторы. Всетаки кто нибудь знает рабочие темпиратуры драйверов?
Знаю технику безопасности как свои три пальца.Эксперт — это существо, которое перестало мыслить, ибо оно знает!В мире еще много граблей, на которые не ступала нога человека.
Пожалуйста! Исправляйте мои глупые ошибки (но оставьте мои умные ошибки)!
#12 ONLINE 3D-BiG
- Пол: Мужчина
- Город: Ареал обитания — вся страна, но обычно встречаюсь в Новосибирске.
- Интересы: Полежать на диване, пофлудить на форуме.
- Из:СССР
Отправлено 23 Июль 2008 — 09:58
Температура при которой могут работать привода шаговых двигателей прописана в их даташите, например:
2BE30-50 — рабочая температура среды 0°C ~ 50°C
Q3HB110M рабочая температура среды до 50°C при температуре корпуса до 70°C
Q2HB88M Q2HB613M рабочая температура среды до 50°C при температуре корпуса до 70°C
— думаю, что тенденция понятна.
НО ЛУЧШЕ В ПРЕДЕЛЬНЫЕ РЕЖИМЫ НЕ ЗАГОНЯТЬ. Например: вентиляторик навесить — пусть попрохладней будут
Лужу, паяю, станки ЧПУ починяю.
Еще частенько здесь болтаю: Телеграм сообщество ЧПУшников: t.me/cncunion
#13 OFFLINE vv92
- Пол: Мужчина
- Город: Н.Новгород
- Из:Н.Новгород
Отправлено 23 Июль 2008 — 11:02
Знаю технику безопасности как свои три пальца.Эксперт — это существо, которое перестало мыслить, ибо оно знает!В мире еще много граблей, на которые не ступала нога человека.
Пожалуйста! Исправляйте мои глупые ошибки (но оставьте мои умные ошибки)!
#14 OFFLINE ZulukBAY

- Пол: Мужчина
- Город: Новокузнецк
Отправлено 27 Ноябрь 2011 — 19:49
Сгорел 2-й раз микродрайвер двигателя.
Сначала Z оси
Теперь один из двух Y оси
Станок ZK1325 Китай
Делал зеркало MR1 3dbyte.ru
Зеркало
Программа NCStudio
Проблемы:
1 как выяснить причины.
2. где выполнить ремонт
Драйвера 2MA860H
www.jmc-motion.com
более читаемо:2MA860H
Станок без гарантии — новые драйвера скоро приедут, но это не выход, мешок дров не купишь они дорогие довольно
Сообщение отредактировал ZulukBAY: 27 Ноябрь 2011 — 20:21
Станок: ZK1325. Step/Dir 2MA860H, NC-Studio Фото моих работ
#15 OFFLINE ZulukBAY
- Пол: Мужчина
- Город: Новокузнецк
Отправлено 10 Декабрь 2011 — 08:52
Выявил неисправные детали: сгорел предохранитель 10А, и 2 полевых — транзистора IRF640N. Интерсно какова причина.
Станок: ZK1325. Step/Dir 2MA860H, NC-Studio Фото моих работ
#16 OFFLINE EugenPKH

- Из:Каир
Отправлено 11 Декабрь 2011 — 02:34
А диоды обратные не выгорели ?
Предохранитель выгорает обычно последним так как появляются сквозные токи а транзисторы скорее всего изза перегрузки выгорели .
#17 ONLINE 3D-BiG
- Пол: Мужчина
- Город: Ареал обитания — вся страна, но обычно встречаюсь в Новосибирске.
- Интересы: Полежать на диване, пофлудить на форуме.
- Из:СССР
Отправлено 11 Декабрь 2011 — 08:18
Какое напряжение питания идет на драйвера? С каким током работают двигатели? какая рабочая температура драйверов в момент долгой работы? Какая наработка драйверов?
Просто гадать по факту, что сгорело 2 драйвера — бесполезно, нужна еще информация.
Возможные варианты выхода из строй:
— конкретный брак.
— работали с напряжением близким к предельному и на торможении индуктивный выброс напряжения двигателей позволил превысить предельное напряжение.
— ко всему прочему могли работать при перегреве..
— проблемы с подводящими проводами (был случай когда фазу коротило из-за плохо собранного стыкованного провода).
Лужу, паяю, станки ЧПУ починяю.
Еще частенько здесь болтаю: Телеграм сообщество ЧПУшников: t.me/cncunion
#18 OFFLINE 0sIrIs

- Пол: Мужчина
- Город: Ярославль\Тель-Авив
- Интересы: Инжиниринг и конструиринг. Лазерная техника. Сэкс, наркотики, рок-н-ролл, жесткий петтинг.
- Из:Ярославль
Отправлено 12 Декабрь 2011 — 11:48
На пурелоджике есть очень интересный девайс, который ставится в цепь между двигателем и драйвером с целью защитить от индуктивного выброса на торможении. При больших нагрузках лучше его использовать.
Китайская техника настраивается бубном, ломом и заклинаниями, чинится самоустранением поломки и юзается кривыми руками!Инструкция – это такая интересная бумага, которую читают только в двух случаях: Первый – это когда читать больше нечего.Второй – это когда все, что уже можно было сломать, сломано.Наша цель — причинить пользу и нанести добро! שלום לכולם
#19 OFFLINE Lodochnik
- Пол: Мужчина
- Из:Королев
Отправлено 12 Декабрь 2011 — 11:56
который ставится в цепь между двигателем и драйвером с целью защитить от индуктивного выброса