Как определить число пар полюсов асинхронного двигателя
Requested virtual server does not exist or temporarily unavailable.
Возможные причины ошибки:
Possible causes of error :
-
Сервер, на котором размещён данный ресурс перегружен;
The server is overloaded;
The virtual server has been incorrectly configured;
Service for requested resource is suspended;
Свяжитесь с нами для получения подробной информации. Контакты
Contact us for more information. Our contacts
Определить число пар полюсов двигателя, номинальное скольжение, номинальные пусковой и вращающие моменты на валу, номинальный и пусковой токи.

Асинхронный электродвигатель с короткозамкнутым ротором подключен к трехфазной сети. Обмотки статора соединены звездой. Определить число пар полюсов двигателя, номинальное скольжение, номинальные пусковой и вращающие моменты на валу, номинальный и пусковой токи.

Обмотку статора асинхронного двигателя соединяем по схеме в звезду, так как линейное напряжение в сети 380 В, а в фазе двигателя220 В.
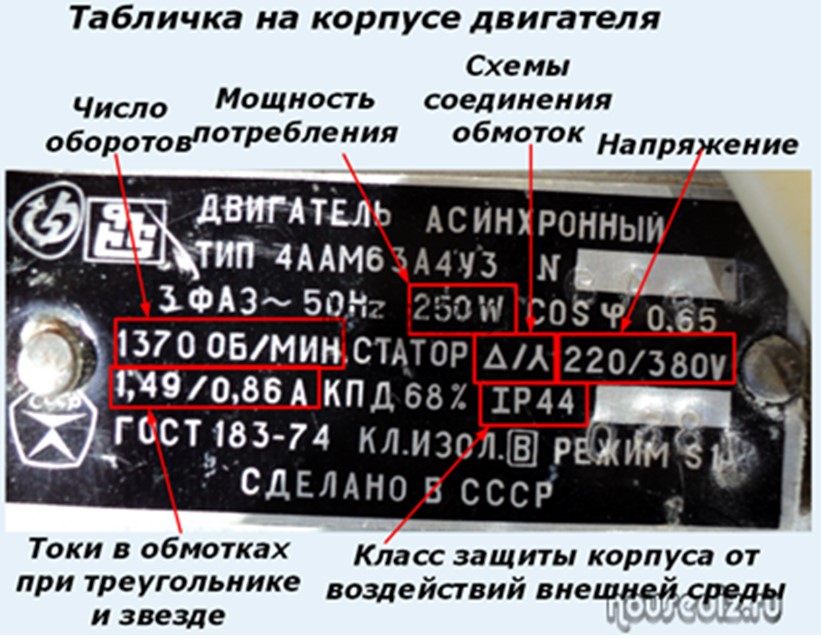
Для определения числа пар полюсов можно воспользоваться маркировкой двигателя, частотой вращения магнитного поля или ротора.
Если известна маркировка, то последнее число в марке двигателя означает количество полюсов. В данном двигателе шесть полюсов; следовательно, три пары. При известной частоте вращения магнитного поля число пар полюсов определяем по формуле:
Все о частотных преобразователях
Частотные преобразователи — это устройства для плавного изменения частоты вращения синхронных и асинхронных двигателей посредством изменения частоты питающего тока.
В современной технике благодаря простоте конструкции и обслуживания, небольшим габаритам, высокой надёжности, и низкой стоимости огромное распространение получили именно асинхронные электродвигатели.
При работе различных устройств, в качестве привода которых применяются асинхронные электродвигатели, часто возникает необходимость в регулировании их скорости вращения.
Исходя из формулы n = (1 — S)60f/p где n — скорость вращения ротора, S — скольжение, f — частота питающей сети, p — количество пар полюсов.
Существует три способа регулирования скорости вращения асинхронного двигателя:
- — изменение скольжения. Этот способ используется в двигателях с фазным ротором. В цепь фазного ротора вводится регулировочный реостат. При использовании этого способа можно получить большой диапазон регулирования частоты вращения в сторону понижения. Однако этот способ имеет, и ряд недостатков, основным из которых является большие потери на регулировочном реостате (нагрев) т.е. снижение КПД. Как следствие этот способ применяют для кратковременного снижения частоты вращения.
- — изменение числа пар полюсов. Этот способ предполагает использование специальных двигателей (многоскоростных) имеющих более сложную обмотку статора, позволяющую изменять число пар полюсов, и короткозамкнутый ротор. Недостатком этого метода является ступенчатое регулирование (3000, 1500, 1000, 750, 600 об/мин – 1,2,3,4,5 обмотки с 1,2,3,4,5 парами полюсов соответственно), большая стоимость и громоздкость двигателя.
- — изменение частоты питающего тока (напряжения). На практике этот метод, в общем случае (самый простой), предполагает вместе с частотой изменять и действующее значение подведенного напряжения таким образом, что бы отношение U/f было постоянно. Это (изменение входного напряжения) делается для сохранения перегрузочной способности двигателя с изменением частоты сети.
В приводах центробежных насосов и вентиляторов, которые являются типичными представителями переменной механической нагрузки (момент нагрузки возрастает с увеличением скорости вращения) используется функция напряжения к квадрату частоты U/f 2 = сonst.
В более совершенных частотных регуляторах для управления скоростью вращения и электромагнитным моментом двигателя независимо, используется так называемое векторное управление. При этом виде управления необходимо управлять амплитудой и фазой статорного тока (т.е. вектором) в зависимости от положения ротора относительно обмотки статора в каждый момент времени.
Применение частотных регуляторов. Зачем нужен частотный регулятор?
Асинхронные двигатели имеют ряд недостатков (сложность регулирования скорости вращения, большие пусковые токи, относительно малый пусковой момент). Однако благодаря своей простоте, надежности и дешевизне получили огромное распространение в промышленности и быту. Применение же частотных регуляторов «устраняет» недостатки асинхронных двигателей и кроме этого позволяет избежать установки различного дополнительного оборудования, уменьшить потери в технологическом процессе, увеличить КПД самого двигателя, уменьшить износ, как самого двигателя, так и оборудования использующегося в данном технологическом процессе.
Рассмотрим более детально применение частотных регуляторов на примере насосного оборудования. Потери в технологической системе зависят от нагрузки создаваемой потребителями (на неё мы влиять не можем) и гидравлическим сопротивлением элементов этой системы. Так поддержание давления у потребителей на постоянном уровне при изменяющейся нагрузке, возможно только при использовании дополнительного оборудования (различных регуляторов давления, мембранных баков, дроссельных задвижек). Использование этого оборудования создает дополнительное гидравлическое сопротивление и как следствие снижает КПД системы в целом. При использовании частотного регулятора двигатель сам регулирует давление в сети посредством изменения частоты вращения. Кроме того при снижении технологической нагрузки уменьшая частоту вращения насоса, КПД самого насоса тоже возрастает. Таким образом достигается как бы двойной эффект увеличивается КПД системы в целом, за счёт исключения из системы лишнего гидравлического сопротивления и увеличение КПД самого насоса как агрегата.
Применение частотного регулятора также значительно снижает эксплуатационные затраты связанные с износом оборудования. Плавное регулирование вращения (и плавный пуск) практически полностью позволяют избежать как гидравлических ударов, так и скачков напряжения в электросети (особенно актуально в системах, где предусмотрен частый пуск/остановка насоса).
Как определить параметры двигателя без шильдика?

Ремонт техники и оборудования на электрическом приводе часто требует замены двигателя. Чтобы производительность и другие параметры производственной линии, или отдельного механизма не изменились, нужно выбирать аналогичный мотор, или, по крайней мере, с максимально приближенными характеристиками. Главные характеристики электродвигателя:
- мощность;
- номинальный ток;
- напряжение питания;
- схема подключения;
- обороты.
В большинстве случаев для того, чтобы определить параметры достаточно посмотреть на шильдик, закрепленный на корпусе двигателя. Но не всегда табличка присутствует, или читается. Многие электромоторы эксплуатируются в достаточно сложных условиях, надписи истираются, шильдик может быть деформирован, или закрашен.
Мощность и ток
Существует ряд способов, как определить рабочие характеристики электродвигателя без информации производителя. Но необходимо сразу оговориться, что некоторые параметры будут определены приблизительно. Причем, чем мощнее мотор, тем точнее будут показатели.
Мощность и частоту вращения определяют по габаритным размерам мотора. Большинство электродвигателей стандартизированы. Если замерить размеры корпуса и толщину вала, форму и размеры лап крепления, то по специальным таблицам легко найти марку двигателя, а, значит, и его характеристики. В случае отсутствия таблиц, можно сравнить возможности неизвестного мотора с образцом, параметры которого определены по шильдику. При одинаковых размерах, двигатель, у которого вал больше по диаметру, будет мощнее, а количество оборотов меньше.
Более точный способ определить мощность электродвигателя — замерить номинальный ток на обмотках при помощи токоизмерительных клещей. Для этого нужно знать величину нагрузки на валу. Обычно этот параметр находят в паспорте оборудования. При измерении необходимо обращать внимание на такой факт — сила тока должна быть одинакова на всех обмотках.
Мощность электродвигателя без бирки также можно вычислить, разделив ток на обмотках на 2 для моторов мощнее (предположительно) 1,5 кВт и на 2,2 для более мощных. Пользуясь замерами сопротивления обмоток на отключенном двигателе также несложно найти типовую мощность. Здесь тоже нужен справочник или таблица по двигателям. У моторов одинакового типа и мощности сопротивление обмоток равное (в некотором приближении).
Частота вращения
Как уже упоминалось, у тихоходных двигателей диаметр вала больше, чем у скоростных. Сравнивая результаты измерений валов двух двигателей, характеристики одного из которых известны, можно определить рабочие характеристики в довольно точном диапазоне. Но есть и более точный способ. Нужно посчитать количество пар полюсов статора и подставить в формулу N= 60F/P, где F – частота питающего тока. В классическом варианте — это 50 Гц, но при вычислении нужно уточнить этот параметр для конкретного участка цепи.
Для того чтобы узнать количество полюсов, нужно демонтировать крышку мотора. Делать это можно только при отключенном питании. Асинхронный двигатель может иметь одну, две, три и более пар полюсов. Для точного определения числа полюсов необходимо разбираться в особенностях намотки статора. Таким способом можно рассчитать количество оборотов с точностью до 10%, что вполне приемлемо для большинства промышленного оборудования.
Напряжение питания
Для определения, к какой сети подключать двигатель, необходимо вскрыть коробку борно. Если провода соединены звездой, значит мотор подключают к трехфазной сети питания, если треугольником — к 220 В через преобразователь частоты, или конденсатор, необходимые для запуска двигателя. На внутренней стороне крышки нанесено изображение схемы подключения и указано напряжение питания. Обычно надписи сохраняются при самых сложных условиях работы мотора.