Что же такое сервомотор?
Сервомотор или как его ещё называют сервопривод за принципом действия очень похож на обыкновенный мотор. Самое главное отличие заключается в том, что приводом сервомотора мы можем управлять. К примеру, задать скорость вращения, либо же поставить в нужное нам положение (определенный градус). По правде говоря, мотор является одним из компонентов сервомотора, можно было догадаться по названию. То есть в середине сервомотора есть мотор с редуктором, который в свою очередь преобразует электричество в механику.
Где используют сервомоторы?
Как вы уже успели догадаться сервоприводы, используют в самых различных сферах робототехники. Они помогают реализовать любое движение робота или нашей системы. К примеру, открывать шлагбаум либо при создании «робо-руки». Ниже представлено фото манипулятора где используют несколько сервомоторов. Купить сервомоторы Вы можете в магазине RoboStore.

Как подключать сервомотор к плате Ардуино Уно?
Подключение любого сервомотора, достаточно простое. Нам необходимо подключить всего три провода к плате Ардуино или какому-то другому МК.
Управление сервоприводами, часть 3. Управляем ШИМ/PWM сервоприводами с разъёмов GPIO компьютеров на примере Repka Pi
Из предыдущих статей нашей серии про сервоприводы вы знаете, что для управления сервоприводами используется широтно-импульсная модуляция ШИМ (Pulse Width Modulation, PWM). Это третья статья серии статей про сервоприводы и в ней мы расскажем, как управлять сервоприводами напрямую с портов GPIO 40-pin разъёма одноплатного микрокомпьютера Repka Pi 3, полностью аналогичного в этом смысле Raspberry Pi 3B+. Мы с Вами разберём, как сделать чисто программный генератор ШИМ, а также как использовать аппаратный генератор ШИМ, доступный в Repka Pi.
Рассмотрим, почему, если нужно управлять большим количеством сервоприводов, то наилучшим решением будет использование специально предназначенных для этого контроллеров серво-драйверов (ServoDriver).
Также рассмотрим, какие меры защиты нужно предпринимать при подключении сервоприводов непосредственно к контактам GPIO одноплатных компьютеров, а также научим запускать программы управления сервоприводами от имени непривилегированных пользователей.
Если Вам интересна тема управления сервоприводами, то все статьи данного цикла статей Вы можете найти здесь:
- Управление сервоприводами, ЧАСТЬ 1. Сервоприводы — устройство и способы управления
- Управление сервоприводами, ЧАСТЬ 2. Управляем сервоприводами с помощью контроллеров-драйверов на примере Robointellect Controller 001 и RI SDK
- Управление сервоприводами, ЧАСТЬ 3. Управляем ШИМ/PWM сервоприводами и светодиодами напрямую с портов GPIO и PWM на примере Repka Pi — это как раз данная статья
- Управление сервоприводами, ЧАСТЬ 4. Прямое управление через порт I2C ШИМ/PWM сервоприводами и светодиодами через аппаратные драйвера на примере Repka Pi и Robointellect Controller 001
- Управление сервоприводами, ЧАСТЬ 5. Асинхронное управление, контроль потребляемой мощности и защита от перегрузки сервоприводов (статья в разработке)
Программный генератор ШИМ
На первый взгляд нетрудно сделать чисто программный генератор, который будет создавать импульсы ШИМ‑модуляции на контактах порта GPIO. При этом длительность импульсов, а также паузу между ними можно задавать при помощи программной задержки или таймеров.
Давайте попробуем использовать задержки в программе, составленной на языке Python.
Собираем макет для тестирования программного ШИМ
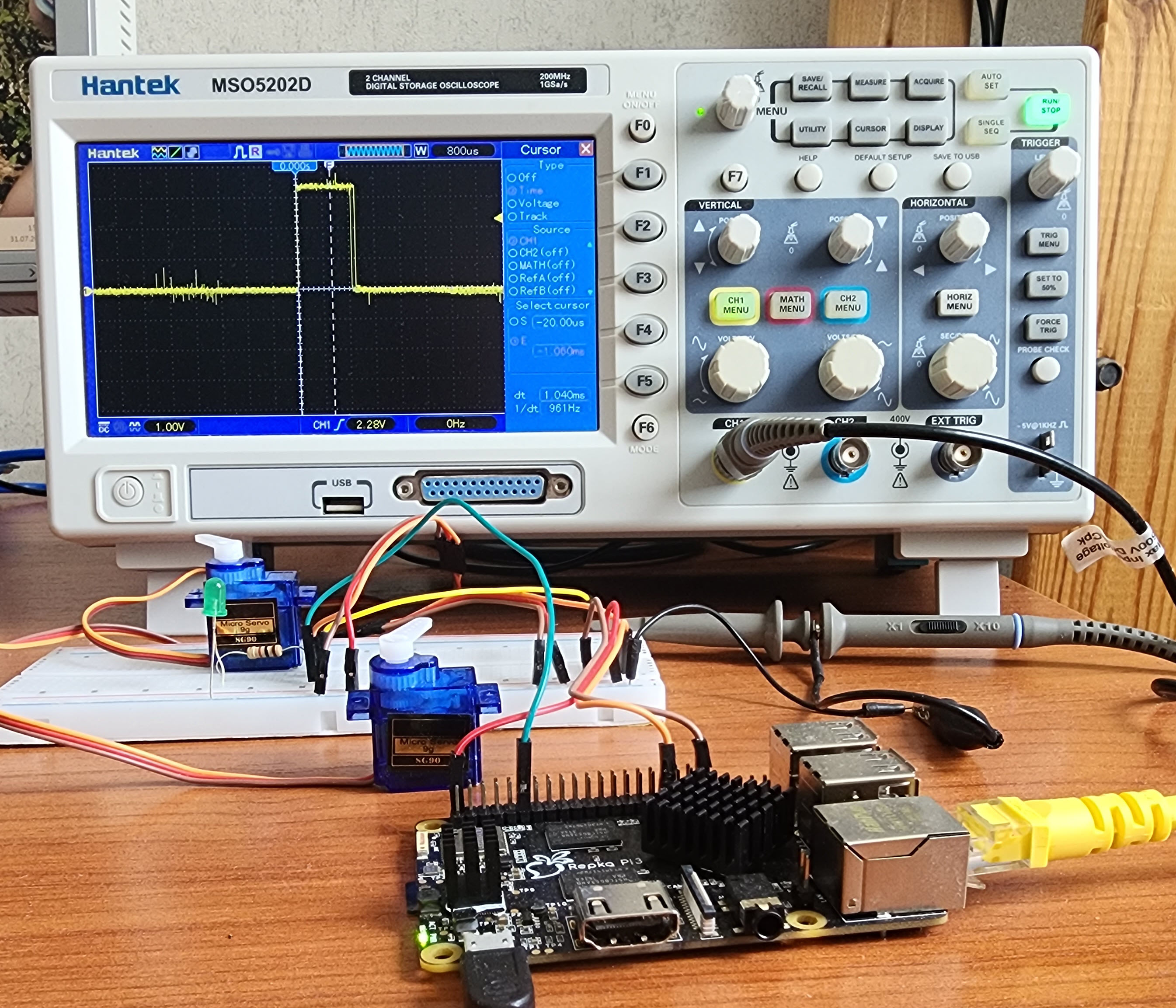
Для изучения возможностей программной генерации ШИМ‑импульсов на микрокомпьютере Repka Pi соберем макет (рис. 1).
Подключите сервопривод к GPIO:
- коричневый провод сервопривода подключите к земле Repka Pi (физические контакты 6, 9, 14, 20, 25, 30, 34 или 39);
- красный провод подключите к питанию +5 В (физические контакты 2 или 4);
- оранжевый провод (используется для передачи управляющих импульсов) подключите к физическому контакту 11 (PA8)
Если в вашем распоряжении имеется осциллограф, подключите его к контакту 11 для контроля качества создаваемых импульсов ШИМ. Также вы можете подключить к этому выводу светодиод через резистор на 1 КОм. Его свечение будет сигнализировать о поступлении импульсов.
Попытка 1: Программная задержка при формировании импульсов
Попробуем использовать для генерации импульсов функцию задержки time.sleep. Исходный код соответствующей программы pwm_sleep.py вы найдете в листинге 1.
import RepkaPi.GPIO as GPIO import time GPIO.setboard(GPIO.REPKAPI3) GPIO.setmode(GPIO.SUNXI) servo_pin = "PA8" GPIO.setup(servo_pin, GPIO.OUT) GPIO.setwarnings(False) def set_servo_angle(angle, frequency_Hz): dutyCycle = angle / 18. + 3. period_duration = 1 / frequency_Hz * 1000 pulse_duration = ((period_duration / 100) * dutyCycle) wait_after_pulse = period_duration - round(pulse_duration, 1) GPIO.output(servo_pin, GPIO.HIGH) time.sleep((pulse_duration / 1000.0)) GPIO.output(servo_pin, GPIO.LOW) time.sleep(wait_after_pulse / 1000.0) try: while True: set_servo_angle(0, 50) except KeyboardInterrupt: GPIO.cleanup()В этой программе исходя из требуемого угла поворота вала сервопривода вычисляется длительность импульса ШИМ pulse_duration, а также длительность паузы перед следующим импульсом wait_after_pulse.
Для формирования импульса на контакте servo_pin функция set_servo_angle с помощью функции GPIO.output вначале устанавливается высокий уровень напряжения (3.3 В), а затем, после задержки на pulse_duration миллисекунд, — низкий уровень.
Функция set_servo_angle вызывается в цикле до тех пор, пока работа программы не будет прервана с помощью комбинации клавиш Ctrl+C.
Перед запуском этой программы на микрокомпьютере Repka Pi необходимо установить библиотеку RepkaPi.GPIO, доступную на GitFlic, а также другие программы и библиотеки.
Установка библиотеки RepkaPi.GPIO выполняется следующим образом:
# apt-get update # apt-get install python3-dev python3-setuptools git # git clone https://github.com/DikShv/RepkaPi3.GPIO.git # cd RepkaPi3.GPIO # python3 setup.py install Установив библиотеку RepkaPi.GPIO, загрузите программу pwm_sleep.py из репозитория по ссылке, приведенной в листинге 1, а затем запустите ее из командной строки:
# python3 pwm_sleep.pyК сожалению, вы будете разочарованы полученным результатом. При таком способе формирования импульсов их длина будет очень нестабильна. Это можно обнаружить с помощью осциллографа.
На этом видео показано, как длительность импульса хаотически изменяется, что приводит к дрожанию вала сервопривода.
Попытка 2: Использование таймеров
Попробуем улучшить стабильность, использовав таймеры вместо функции задержки в программе pwm_threads.py (листинг 2).
import RepkaPi.GPIO as GPIO import time import threading GPIO.setboard(GPIO.REPKAPI3) GPIO.setmode(GPIO.SUNXI) servo_pin = "PA8" GPIO.setup(servo_pin, GPIO.OUT) GPIO.setwarnings(False) def set_servo_angle(angle, frequency_Hz): dutyCycle = angle / 18. + 3. period_duration = 1 / frequency_Hz * 1000 pulse_duration = ((period_duration / 100) * dutyCycle) wait_after_pulse = period_duration - round(pulse_duration, 1) GPIO.output(servo_pin, GPIO.HIGH) threading.Timer(pulse_duration / 1000.0, lambda: GPIO.output(servo_pin, GPIO.LOW)).start() threading.Timer(wait_after_pulse / 1000.0, lambda: set_servo_angle(angle, frequency_Hz)).start() try: threading.Timer(2, lambda: set_servo_angle(0, 50)).start() except KeyboardInterrupt: GPIO.cleanup()Здесь функция set_servo_angle устанавливает высокий уровень напряжения на контакте servo_pin. Затем она запускает таймер threading.Timer на время pulse_duration, а после его срабатывания — сбрасывает уровень напряжения на этом контакте в ноль.
Далее опять же с помощью таймера функция set_servo_angle дожидается окончания паузы wait_after_pulse после импульса, и запускает set_servo_angle снова.
Оказалось, что этот вариант работает даже хуже предыдущего — длительность импульсов не только осталась нестабильной, но еще она превышает заданное значение.
Попытка 3: Давайте все напишем на С++
Но может быть проблема в Python? Все же это интерпретируемый язык, работает не очень быстро.
В листинге 3 мы привели в сокращенном виде исходный код программы pwm_timers.cpp, составленной на языке C++.
… void generate_pulse(int pulse_duration_us) < set_gpio_value(1); std::this_thread::sleep_for(std::chrono::microseconds(pulse_duration_us)); set_gpio_value(0); >void pulse_function() < float dutyCycle = 90 / 18.0f + 3.0f; float period_duration = (1000.0f / 50) * 1000; float pulse_duration = static_cast(period_duration * (dutyCycle / 100.0f)); int pulse_duration_us = static_cast(pulse_duration_ms * 1000); int wait_after_pulse = static_cast(period_duration - pulse_duration_us); std::cout > …Эта программа генерирует импульсы ШИМ с помощью асинхронного запуска функции generate_pulse, формирующей управляющий импульс ШИМ. Далее она дожидается завершения интервала перед началом следующего импульса и запускает генерацию снова.
Скомпилируйте программу и запустите ее с максимальным приоритетом:
# g++ -o pwm_timers pwm_timers.cpp -pthread # nice -n -20 chrt --rr 99 ./pwm_timersНужно сказать, что стабильность длительности импульса стала гораздо выше, чем при использовании программы на Phyton, однако ее все же совершенно недостаточно для управления сервоприводами. Если вы запустите эту программу на выполнение, то увидите заметное дрожание вала сервопривода.
В чем причина нестабильности длительности импульсов при попытке генерации ШИМ‑импульсов чисто программными методами?
Дело в том, что Repka OS, установленная на микрокомпьютере Repka Pi, создана на базе Ubuntu. Это операционная система не предназначена для работы в реальном времени, у нее совсем другие области применения.
Возможно, вы уже успешно генерировали ШИМ‑импульсы программными методами на микроконтроллерах, таких как Ардуино. Да, в этих микроконтроллерах нет такого количества прерываний и переключений процессов, как при использовании Ubuntu, поэтому длительность импульсов будет стабильна.
Но что же делать, если возможностей простых микроконтроллеров не хватает? Как правильно управлять сервоприводами с помощью микрокомпьютера Repka Pi с установленной на нем Repka OS?
Тут есть два решения — использование аппаратного ШИМ‑генератора, встроенного в процессор, а также использование внешних контроллеров ШИМ.
Аппаратный ШИМ-генератор на примере Repka Pi
Если нужно получить стабильные управляющие импульсы ШИМ, не обойтись без аппаратного генератора. Обычно в процессорах, установленных в микрокомпьютерах, уже есть некоторое количество таких генераторов. В микрокомпьютере Repka Pi выход одного из таких генераторов выведен на контакт 33 интерфейса GPIO, чем мы и воспользуемся.
Установка нужной распиновки
Для использования аппаратного генератора ШИМ в Repka Pi нужно после загрузки Repka OS установить пятый вариант распиновки. В результате этого контакт 33 будет играть роль выхода генератора ШИМ, встроенного в процессор.
Для установки распиновки запустите утилиту repka‑config и после выбора частоты процессора в меню 3 Frequency / Pinout Options в меню выбора варианта прошивки задайте пятый вариант, в описании которого встречается строка PWM-1 (рис. 2).
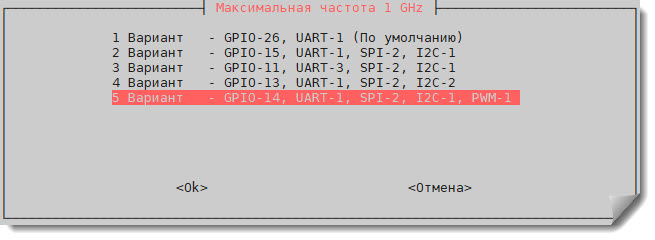
После выбора нужного варианта выделите Ok, нажмите клавишу Enter и перезагрузите ОС. Вообще нужно отметить, что у одноплатника Repka Pi уже успело сформироваться определённое онлайн‑профессиональное сообщество, основавшееся в Телеграм группе обсуждения канала проекта, там можно задавать любые вопросы по проектам на основе Репки, участники дают ответы и помогают разобраться с возникающими вопросами и что не маловажно, как правило весьма дружелюбное отношение и на сложные вопросы часто можно получить ответы от разработчиков одноплатника.
Собираем макет для тестирования аппаратной ШИМ
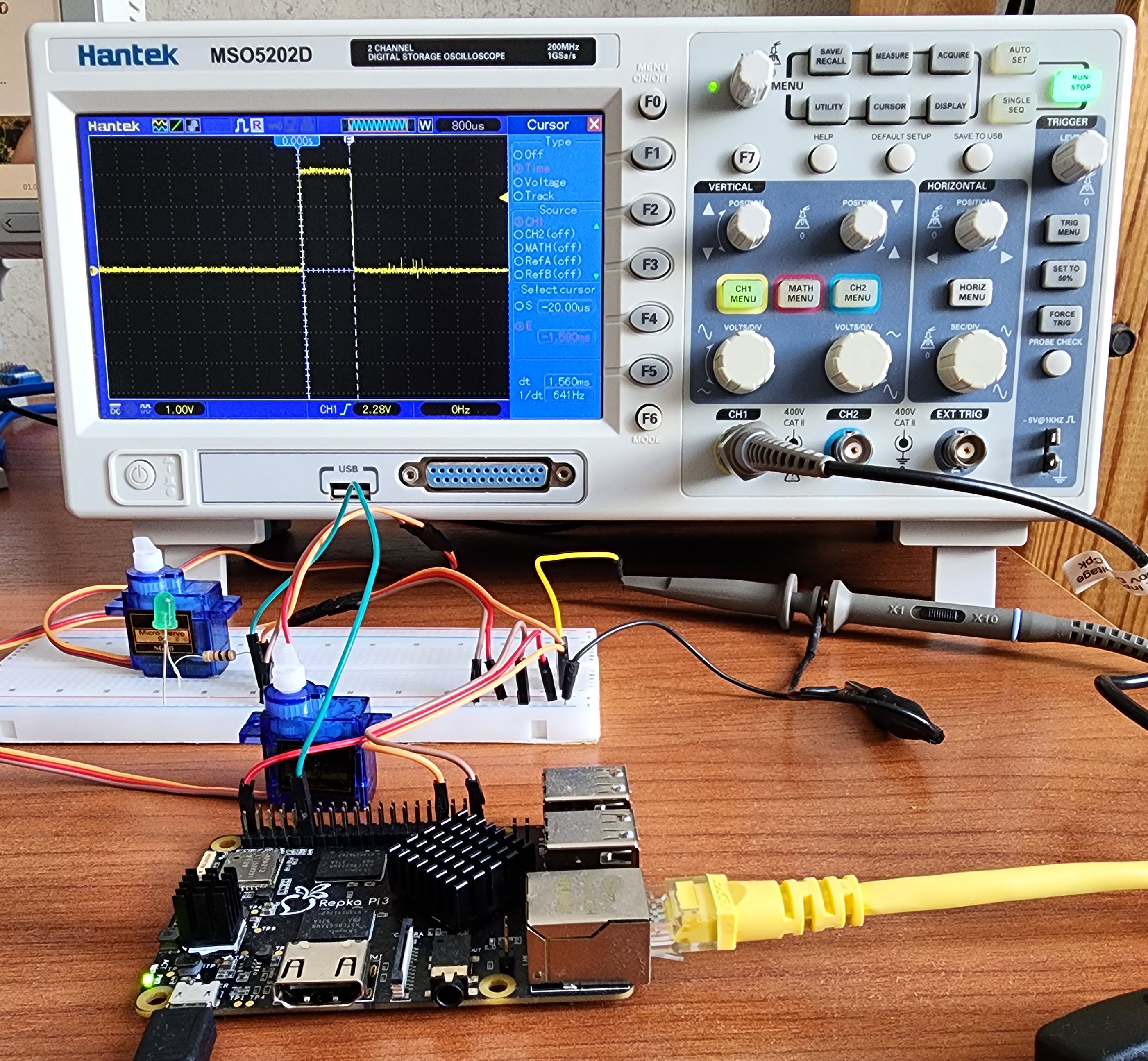
Добавьте к собранному ранее макету еще один сервопривод, подключив его к контакту 33, как это показано на рис. 3.
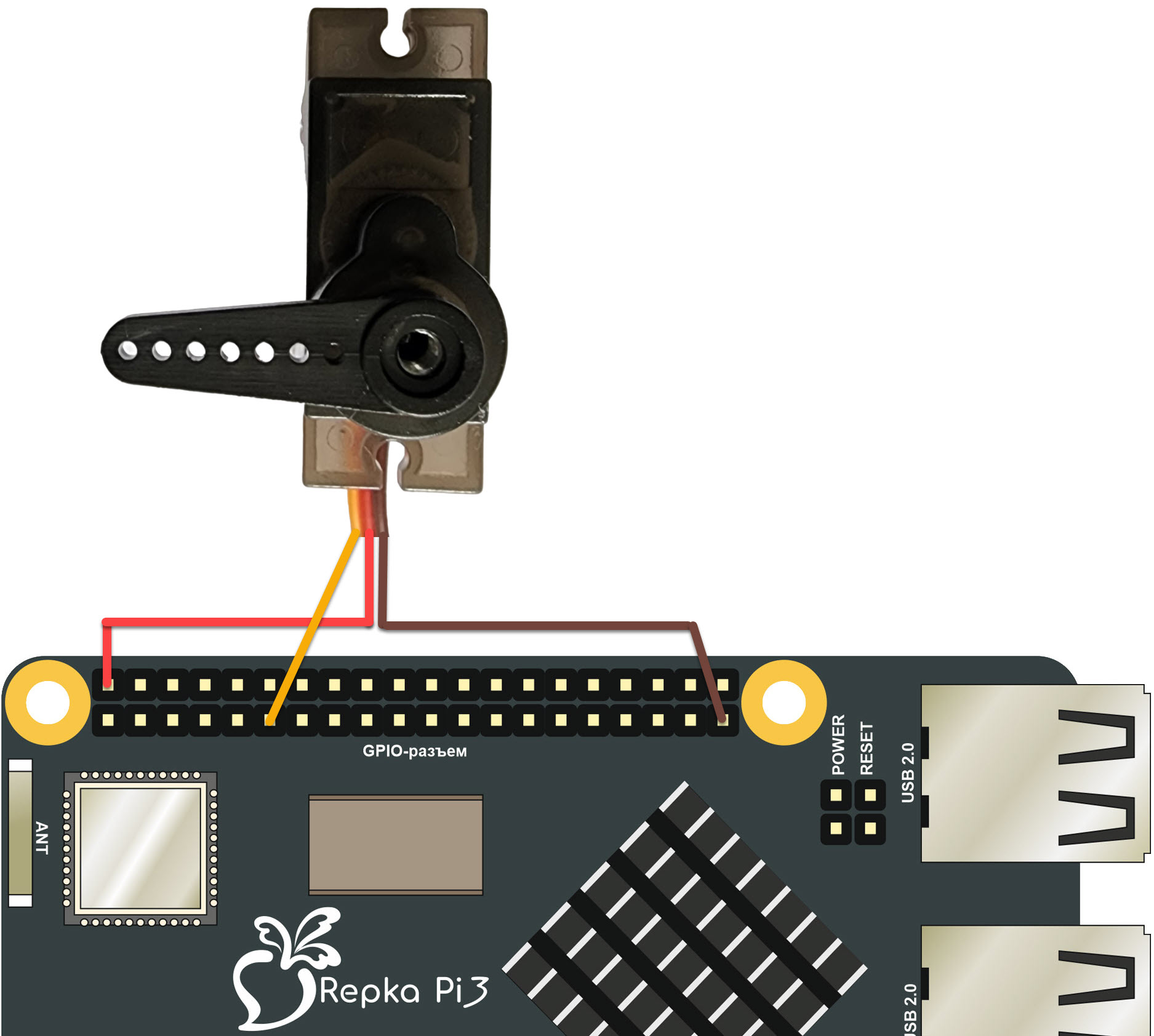
Подключите сервопривод к контакту GPIO аппаратного ШИМ-генератора (рис. 4):

- коричневый провод сервопривода подключите к земле Repka Pi (физические контакты 6, 9, 14, 20, 25, 30, 34 или 39);
- красный провод подключите к питанию +5 В (физические контакты 2 или 4);
- оранжевый провод (используется для передачи управляющих импульсов) подключите к физическому контакту 33
Перед включением питания микрокомпьютера дважды проверьте соединения. Ошибки могут привести к выходу микрокомпьютера из строя.
Управляем сервоприводом на примере SG90
Для управления сервоприводом sg90 с помощью аппаратного генератора ШИМ, встроенного в процессор микрокомпьютера Repka Pi, загрузите программу sg90_test.py (листинг 4).
import RepkaPi.GPIO as GPIO from time import sleep import sys def setServoAngle(servo, frequency_Hz, angle): servo.start_pwm() dutyCycle = angle / 18. + 3. print("Угол поворота: " + str(angle) + "\xb0") print("Коэффициент заполнения Duty: " + str(dutyCycle) + "%") period_duration = 1 / frequency_Hz * 1000 print("Длительность периода: ", period_duration, "мс, частота " + str(frequency_Hz) + " Гц") pulse_duration = (period_duration / 100) * dutyCycle print("Длительность импульса ШИМ :", round(pulse_duration, 1), "мс") servo.duty_cycle(dutyCycle) sleep(0.3) servo.stop_pwm() if __name__ == "__main__": PWM_chip = 0 PWM_pin = 0 frequency_Hz = 50 Duty_Cycle_Percent = 8 servo = GPIO.PWM_A(PWM_chip, PWM_pin, frequency_Hz, Duty_Cycle_Percent) setServoAngle(servo, frequency_Hz, 0) sleep(2) setServoAngle(servo, frequency_Hz, 90) sleep(2) setServoAngle(servo, frequency_Hz, 180) sleep(2) servo.pwm_close() del servoПосле запуска эта программа поочередно поворачивает вал сервопривода в положения 0⁰, 90⁰ и 180⁰ с интервалом 2 секунды.
Для каждого положения программа выводит на консоль значения коэффициента заполнения Duty, длительность периода и длительность импульса ШИМ:
# python3 sg90_test.py Угол поворота: 0° Коэффициент заполнения Duty: 3.0% Длительность периода: 20.0 мс, частота 50 Гц Длительность импульса ШИМ : 0.6 мс Угол поворота: 90° Коэффициент заполнения Duty: 8.0% Длительность периода: 20.0 мс, частота 50 Гц Длительность импульса ШИМ : 1.6 мс Угол поворота: 180° Коэффициент заполнения Duty: 13.0% Длительность периода: 20.0 мс, частота 50 Гц Длительность импульса ШИМ : 2.6 мсНа видео показано, что теперь программа уверенно задает положение вала сервопривода, нет никакого дрожания или нестабильности. На экране осциллографа видно изменение длительности управляющего импульса и вызванные этими изменениями повороты вала сервопривода.
При вызове функция setServoAngle пересчитывает угол поворота в коэффициент заполнения ШИМ для функции duty_cycle, выдающей управляющий сигнал на сервопривод.
Для преобразования угла в коэффициент заполнения dutyCycle, используется формула:
dutyCycle = angle / 18. + 3.Здесь сначала выполняется деление значения угла на 18. В итоге диапазон изменения угла [0, 180] приводится к диапазону [0, 10]. Далее этот диапазон смещается добавлением значения 3. Как результат получается диапазон [3, 13].
Что касается диапазона изменения длительности импульса ШИМ, то для изменения угла в пределах [0, 180] он составит [0.6, 2.6]. Такой диапазон вполне подходит для управления сервоприводами SG90 и mg90s.
Если нужно задавать другой диапазон изменения длительностей, укажите вместо 3 другое значение в приведенной выше формуле.
Управляем сервоприводом постоянного вращения DS04-NFC
Подавая управляющие импульсы ШИМ на сервоприводы с удержанием угла, вы можете задавать нужное положение вала такого сервопривода.
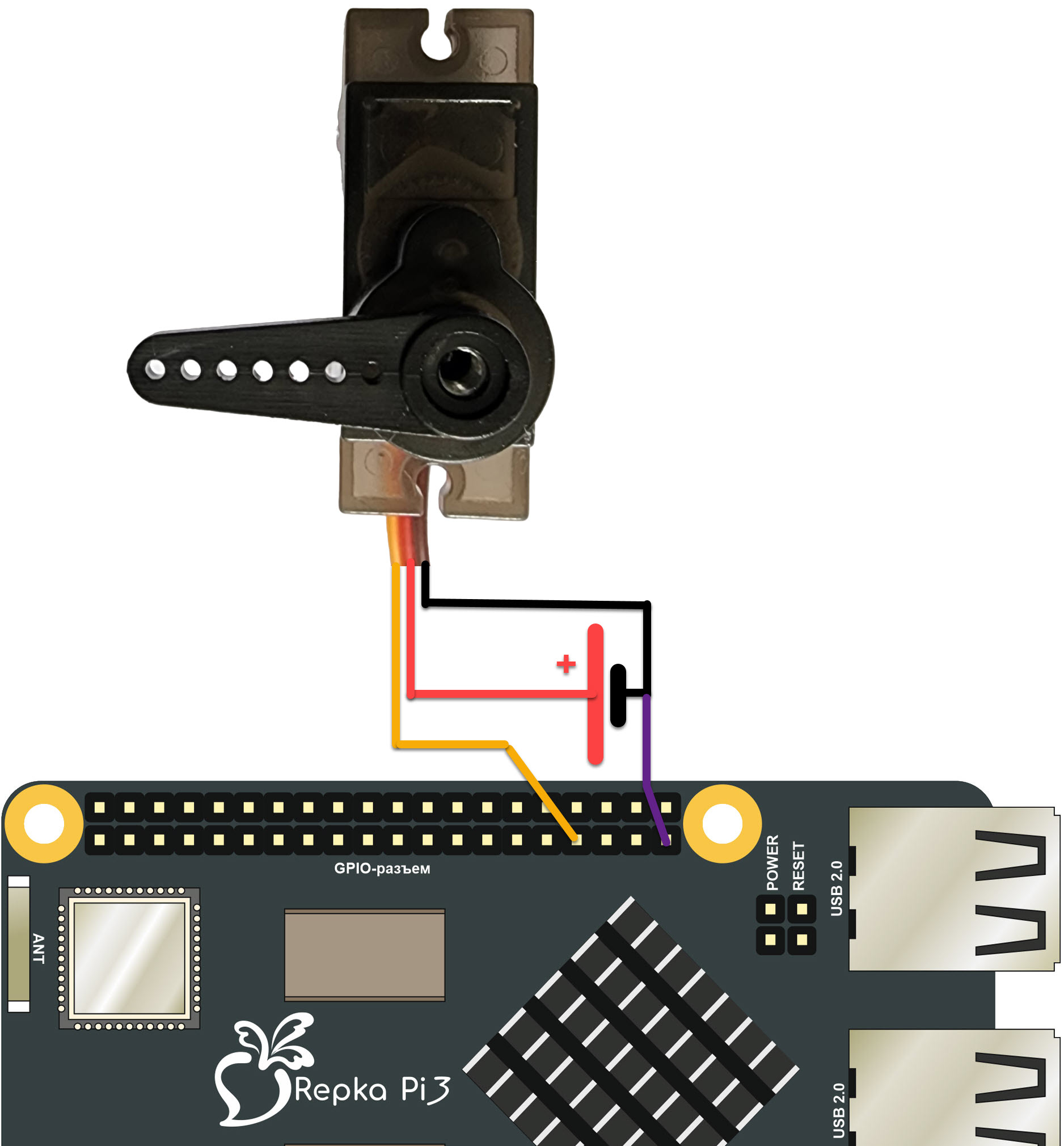
Что касается сервоприводов постоянного вращения (рис. 5), то с помощью импульсов ШИМ можно управлять скоростью и направлением вращения его вала. Также можно полностью остановить вращение.

Подключение сервопривода DS04-NFC
Замените в нашем макете сервопривод с удержанием угла sg90 сервоприводом постоянного вращения DS04-NFC.
Подключите его к контакту аппаратного ШИМ‑генератора GPIO, к питанию и земле следующим образом:
- черный провод сервопривода подключите к земле Repka Pi (физические контакты 6, 9, 14, 20, 25, 30, 34 или 39);
- красный провод подключите к питанию +5 В (физические контакты 2 или 4).
- белый провод нужно подключить к физическому контакту 33 (используется для передачи управляющих импульсов)
Проверьте все соединения дважды перед включением питания микрокомпьютера.
В зависимости от длительности управляющего импульса ШИМ вал сервопривода будет находиться в одном из трех состояний:
- 1 мс — вал вращается с полной скоростью против часовой стрелки;
- 1.5 мс — вал остановлен;
- 2 мс — вал вращается с полной скоростью по часовой стрелке
Промежуточные значения длительности импульсов от 1 мс до 1.5 мс и от 1.5 мс до 2 мс используются для управления скоростью вращения вала.
Программа управления сервоприводом DS04-NFC
Для управления скоростью и направлением вращения вала сервопривода DS04-NFC мы подготовили программу [DS04-NFC.py](http://DS04-NFC.py) (листинг 5).
#!/usr/bin/env python3 import RepkaPi.GPIO as GPIO import time import warnings if __name__ == '__main__': try: PWM_chip = 0 PWM_pin = 0 frequency_Hz = 50 Duty_Cycle_Percent = 0 servo = GPIO.PWM_A(PWM_chip, PWM_pin, frequency_Hz, Duty_Cycle_Percent) while True: pulse_width = float(input("Введите длительность импульса (1-2): ")) pulse_width = pulse_width / 1000; duty = pulse_width / (1 / frequency_Hz) * 100 print(pulse_width) print(duty) servo.start_pwm() servo.duty_cycle(duty) time.sleep(10) servo.stop_pwm() except KeyboardInterrupt: servo.pwm_close() del servo GPIO.cleanup()Запустите программу DS04-NFC.py в командной строке без параметров. После запуска программа попросит вас ввести длительность импульса в мс. Указывайте здесь значения в диапазоне [1, 2]:
# python3 DS04-NFC.py Введите длительность импульса (1-2): 1 Длительность импульса ШИМ :0.001 mc Коэффициент заполнения Duty: 5.0% Введите длительность импульса (1-2): 2 Длительность импульса ШИМ :0.002 mc Коэффициент заполнения Duty: 10.0% Введите длительность импульса (1-2): 1.5 Длительность импульса ШИМ :0.0015 mc Коэффициент заполнения Duty: 7.5%Убедитесь, что сервопривод работает, как ожидается. Для завершения работы программы нажмите в консоли комбинацию клавиш Ctrl+C.
Управляем светодиодом
С помощью ШИМ‑генератора можно управлять яркостью свечения светодиода. Чем больше коэффициент заполнения duty, тем дольше длится вспышка светодиода, и тем он ярче светится.
Подключите положительный вывод светодиода через резистор 1 КОм к контакту 33, как это показано на рис. 6.

В листинге 6 мы привели исходный код программы, меняющей яркость от нулевой до максимальной и обратно.
import RepkaPi.GPIO as GPIO from time import sleep import sys if __name__ == "__main__": PWM_chip = 0 PWM_pin = 0 frequency_Hz = 1000 Duty_Cycle_Percent = 8 led = GPIO.PWM_A(PWM_chip, PWM_pin, frequency_Hz, Duty_Cycle_Percent) try: while True: for duty_cycle in range(0, 101, 5): led.start_pwm() led.duty_cycle(duty_cycle) sleep(0.1) led.stop_pwm() for duty_cycle in range(100, -1, -5): led.start_pwm() led.duty_cycle(duty_cycle) sleep(0.1) led.stop_pwm() except KeyboardInterrupt: pass led.pwm_close() del ledПри инициализации ШИМ‑генератора программа устанавливает частоту управляющих импульсов, равную 1000 Гц. При такой частоте мерцание светодиода будет незаметно.
Далее программа в первом цикле меняет значение duty от нуля до 100 с интервалом 5, а затем во втором цикле выполняет аналогичным образом постепенное уменьшение duty.
Чтобы прервать работу программы, нажмите комбинацию клавиш Ctrl+C.
Результат работы программы можно посмотреть на этом видео.
Защита при подключении сервопривода к микрокомпьютеру
Контакты интерфейса GPIO в микрокомпьютере Repka Pi имеют очень небольшую нагрузочную способность — к ним можно подключать устройства, потребляющие ток не более нескольких миллиампер. Если контакт GPIO используется как вход, то на него должно подаваться положительное напряжение величиной до 3.3 В.
Защитный резистор
Для защиты контактов GPIO от чрезмерного выходного тока при подключении таких устройств, как, например, светодиод или управляющий вход сервопривода небольшой мощности можно использовать резистор сопротивлением 1 кОм.
Преобразователи уровней
Если возникла необходимость управления мощными сервоприводами, перед подключением необходимо узнать из документации (даташита) значение управляющего напряжения и тока, а также напряжения и тока питания самого сервопривода.
Может оказаться, что для управления сервоприводом необходимо напряжение порядка 5 В, да и ток управления может оказаться довольно большим.
Например, для управления сервоприводом MG995 необходимы импульсы ШИМ амплитудой от 4.8 В до 7.2 В. Вы не сможете управлять этим сервоприводом, подключив его непосредственно к GPIO микрокомпьютера Repka Pi — там на выходе всего лишь 3.3 В.
Чтобы решить эту задачу, можно использовать преобразователи уровней, например 8-канальный преобразователь TXS0108E или аналогичный. В этой статье вы найдете пример подключения этого преобразователя.
Другой вариант — использование микросхемы ULN2003A, содержащей в себе семь пар транзисторов, включенных по схеме Дарлингтона. Учтите, что эта схема выполняет инвертирование управляющих сигналов.
Если нужна гальваническая развязка между микрокомпьютером и сервоприводами, то пригодятся такие устройства, как оптопары, например, 6N137.
Внешний источник питания сервопривода
Другой важный момент — не всегда можно использовать для питания сервопривода напряжение 5 В, взятое с физических контактов 2 или 4 разъема GPIO микрокомпьютера Repka Pi. Ток, потребляемый мощными сервоприводами, может оказаться слишком большим, поэтому тут лучше использовать отдельный источник питания.
Разумеется, земля внешнего источника питания сервопривода должна быть соединена с землей микрокомпьютера (если только вы не используете оптопары для гальванической развязки). Но это нужно сделать так, чтобы через контакты микрокомпьютера не протекал большой ток питания сервопривода.
Пример подключения внешнего источника питания для сервопривода показан на рис. 7.
Обратите внимание, что большой ток, необходимый для работы сервопривода, идет «в обход» платы микрокомпьютера. Однако ток управления поступает в сервопривод по другому, слаботочному контуру.
Использование контроллера для управления сервоприводами
Хотя процессоры, на базе которых создаются микрокомпьютеры, содержат в себе довольно много аппаратных генераторов ШИМ, их обычно не выводят все на интерфейс GPIO.
Во‑первых, у GPIO не так много контактов и они могут быть нужны для других целей. Во‑вторых, подключение большого количества сервоприводов к GPIO вызывает слишком большую токовую нагрузку.
Наилучшее решение для подключения сервоприводов к микрокомпьютеру — использование специализированных контроллеров. Такие контроллеры совместимы с GPIO микрокомпьютеров и обеспечивают необходимые параметры управляющих сигналов для сервоприводов.
Кроме того, контроллеры допускают одновременное подключение большого количества сервоприводов. Например, к контроллеру Robointellect Controller 001 (рис. 8), созданному на базе микросхемы PCA9685, можно подключить до 16 сервоприводов. И при необходимости такие контроллеры можно каскадировать через I2C, подключая десятки и сотни сервоприводов.
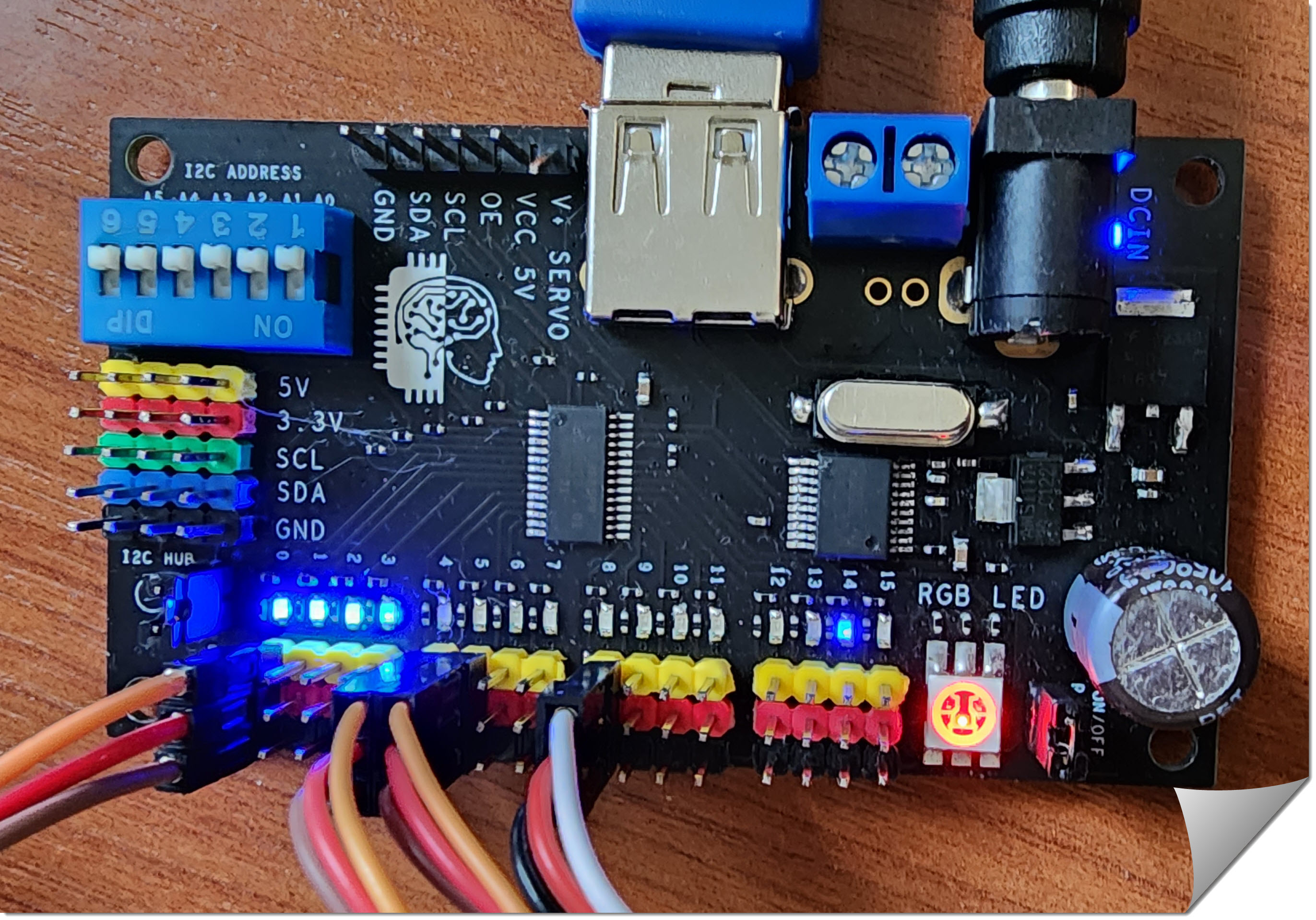
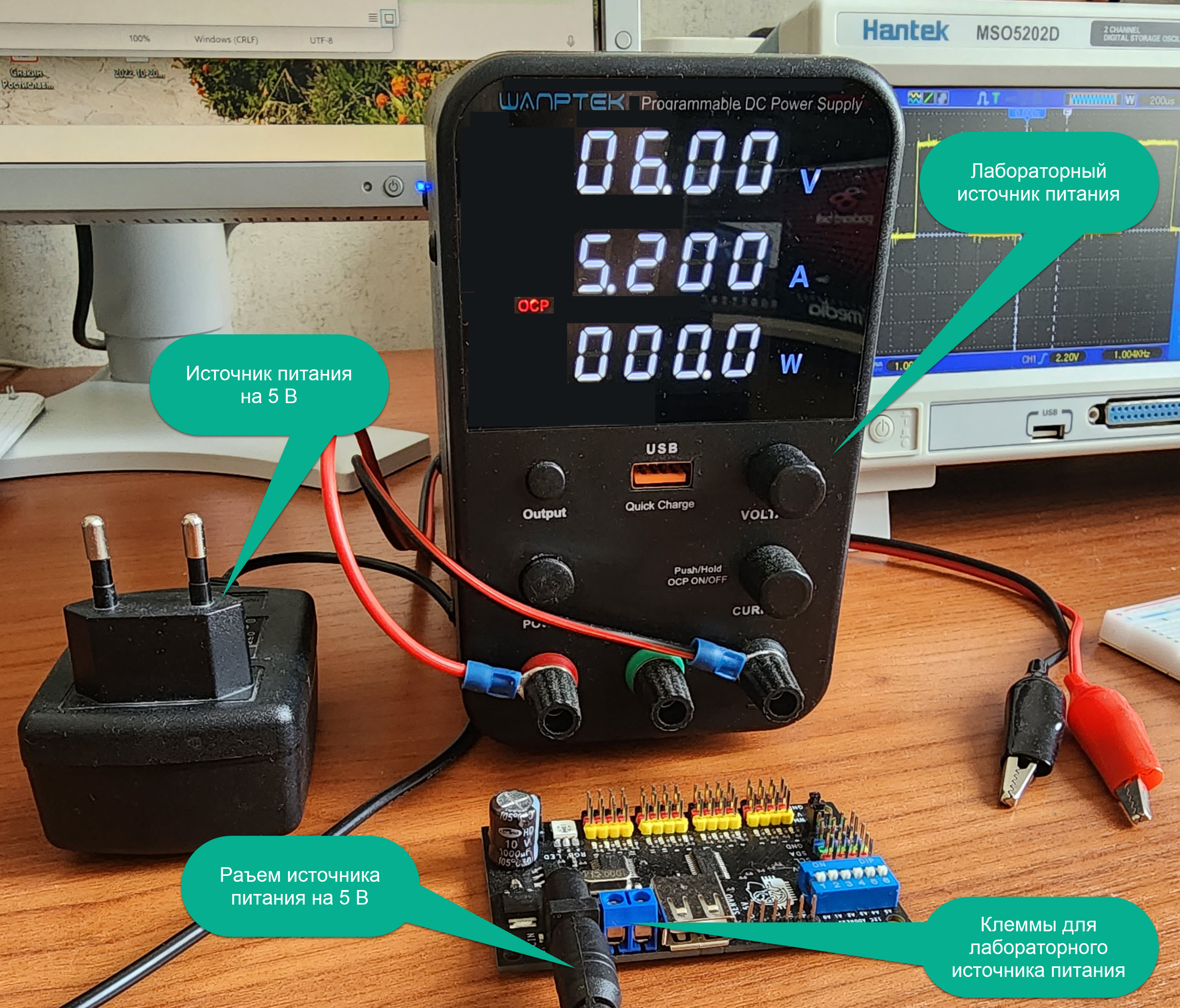
Контроллер Robointellect Controller 001 позволяет питать подключенные к нему сервоприводы как от внешнего блока питания на 5 В, так и от лабораторного блока питания, или любого внешнего блока питания с подключением через клеммы (рис. 9)
Запуск с правами обычного пользователя
Все программы, приведенные в этой статье, требуют для своей работы прав пользователя root. Это связано с тем, что нужной для этих программ библиотеке RepkaPi.GPIO требуется доступ к системным файлам, например, к файлу /sys/class/pwm/pwmchip0/export:
# ls -lh /sys/class/pwm/pwmchip0/export --w------- 1 root root 4,0K авг 3 08:19 /sys/class/pwm/pwmchip0/exportЕсли по каким‑то причинам требуется запустить программу, управляющую сервоприводами, от непривилегированного пользователя, придется использовать sudo.
Добавление пользователя
Допустим, нужно создать обычного пользователя с именем developer. Вы можете это сделать с помощью команды adduser, указав ей в качестве параметра имя пользователя:
# adduser developer Добавляется пользователь «developer» . Добавляется новая группа «developer» (1000) . Добавляется новый пользователь «developer» (1000) в группу «developer» . Создаётся домашний каталог «/home/developer» . Копирование файлов из «/etc/skel» . Новый пароль : Повторите ввод нового пароля : passwd: пароль успешно обновлён Изменение информации о пользователе developer Введите новое значение или нажмите ENTER для выбора значения по умолчанию Полное имя []: Номер комнаты []: Рабочий телефон []: Домашний телефон []: Другое []: Данная информация корректна? [Y/n] yТакже задайте пароль пользователя и подтвердите его добавление.
Предоставление прав на sudo
После добавления пользователя разрешите ему работать с командой sudo:
# usermod -aG sudo developerТеперь проверьте запуск какой-нибудь программы из этой статьи от имени непривилегированного пользователя с помощью sudo, например:
$ git clone https://github.com/AlexandreFrolov/repka-pi-pwm.git $ cd repka-pi-pwm $ sudo python3 DS04-NFC.pyЕсли все работает, то можно разрешить запуск программы DS04-NFC.py от имени пользователя developer.
Разрешение запуска программы DS04-NFC.py
При настройке разрешения запуска программы DS04-NFC.py (или любой другой) обычному пользователю с предоставлением ей прав root нужно указывать полный путь к программе, а не ее имя. В противном случае злоумышленник сможет создать программу с таким же именем и запустить ее с правами root.
Чтобы можно было запускать программу DS04-NFC.py не как параметр для python3, а непосредственно из командой строки, указывая полный путь к ее файлу, нужно добавить путь к python3 в первую строку файла программы:
#!/usr/bin/env python3 import RepkaPi.GPIO as GPIO …Также потребуется установить атрибут, разрешающий запуск программы.
$ chmod +x DS04-NFC.pyТеперь проверьте, что программа запускается с указанием ее полного пути от имени непривилегированного пользователя developer:
$ sudo /home/developer/repka-pi-pwm/DS04-NFC.pyСоздайте файл DS04-NFC.sh с таким содержимым:
#!/bin/bash sudo /home/developer/repka-pi-pwm/DS04-NFC.pyРазрешите запуск программы DS04-NFC.py и скрипта DS04-NFC.sh:
$ chmod +x /home/developer/repka-pi-pwm/DS04-NFC.py $ chmod +x DS04-NFC.shПроверьте, что скрипт DS04-NFC.sh запускается по его полному пути от имени пользователя developer:
$ /home/developer/repka-pi-pwm/DS04-NFC.shДобавление программы в sudoers
Введите команду visudo от имени пользователя root:
# visudoНа экране появится редактор файла sudoers.
Добавьте в него после строки, задающей права root новую строку для пользователя developer:
root ALL=(ALL:ALL) ALL developer ALL=(ALL:ALL) /home/developer/repka-pi-pwm/DS04-NFC.shСохраните содержимое файла при помощи комбинации клавиш Ctrl+O, подтвердив сохранение файла, а затем закройте редактор комбинацией клавиш Ctrl_X.
Проверьте, что теперь вы можете запускать программу DS04-NFC.py через полный путь к скрипту DS04-NFC.sh:
developer@Repka-Pi:~$ /home/developer/repka-pi-pwm/DS04-NFC.shИтоги
Из этой статьи Вы узнали, как можно управлять сервоприводами, подключенными непосредственно к контактам GPIO на примере одноплатного микрокомпьютера Repka Pi (Raspberry совместимого Российского аналога).
Вы так же попробовали создать чисто программные ШИМ‑генераторы, управляющие уровнем выходного напряжения на контактах GPIO. Вы убедились, что длительность создаваемых такими генераторами, весьма нестабильна, так как Repka OS, как и большинство подобных операционных систем общего назначения, не является операционной системой реального времени и предназначена для решения других задач.
Однако с помощью аппаратного ШИМ‑генератора, доступного в Repka Pi, можно вырабатывать стабильные импульсы, подходящие в т.ч. для точного и стабильного управления сервоприводами и подобными им устройствами.
Вы также знаете, что при необходимости управления большим количеством сервоприводов имеет смысл использовать контроллер RoboIntellect Controller 001 или подобные ему контроллеры серво‑драйверы. С учетом возможности каскадирования такие контроллеры могут управлять десятками и сотнями сервоприводов одновременно.
Мы с Вами рассмотрели необходимые меры безопасности, которые позволят сохранить исправность Вашего одноплатного микрокомпьютера при подключении к нему сервоприводов большой мощности.
Вы также теперь умеете запускать программы управления сервоприводами с правами непривилегированного пользователя в ОС Linux.
- Разработка робототехники
- Разработка для интернета вещей
- Разработка на Raspberry Pi
- Робототехника
- DIY или Сделай сам
Arduino для начинающих. Урок 4. Управление сервоприводом


Продолжаем серию уроков “Arduino для начинающих”. Сегодня собираем модель с сервоприводом — это также одна из базовых схем. Сервоприводы используются в робототехнике для управления движениями робота. В посте помимо видео-инструкции листинг программы и схема подключения.
Сервопривод — это мотор, положением вала которого мы можем управлять. От обычного мотора он отличается тем, что ему можно точно в градусах задать положение, в которое встанет вал. Сервоприводы используются для моделирования различных механических движений роботов.
Видео-инструкция сборки модели:
Для сборки модели с сервоприводом нам потребуется:
- плата Arduino
- 3 провода “папа-папа”
- сервопривод
- программа Arduino IDE, которую можно скачать с сайта Arduino.

Компоненты для сборки модели Arduino с сервоприводом
Схема подключения модели Arduino с сервоприводом:

Схема подключения сервопривода на Arduino
Для работы этой модели подойдет следующая программа (программу вы можете просто скопировать в Arduino IDE):
#include //используем библиотеку для работы с сервоприводом
Servo servo; //объявляем переменную servo типа Servo
void setup() //процедура setup
servo.attach(10); //привязываем привод к порту 10
>
void loop() //процедура loop
servo.write(0); //ставим вал под 0
delay(2000); //ждем 2 секунды
servo.write(180); //ставим вал под 180
delay(2000); //ждем 2 секунды
>
Последние четыре команды программы задают угол поворота вала сервопривода и время ожидания (в миллисекундах) до следующего поворота. Эти цифры можно поменять — в видео во втором варианте мы поставили 0-1000-90-1000, что означает поворот на 90 градусов с ожиданием в 1 секунду (1000 миллисекунд), возврат обратно и т.д. (процедура loop повторяется циклично).
Кроме того, в этом уроке мы впервые используем библиотеки.
Библиотека — это набор дополнительных команд, который позволяет вводить программу в упрощенном формате. Здесь мы используем библиотеку для работы с сервоприводами Servo.h.
Так выглядит собранная модель Arduino с сервоприводом:

Собранная модель Arduino с сервоприводом
Смотрите также:
Посты по урокам:
- Первый урок: Светодиод
- Второй урок: Кнопка
- Третий урок: Потенциометр
- Четвертый урок: Сервопривод
- Пятый урок: Трехцветный светодиод
- Шестой урок: Пьезоэлемент
- Седьмой урок: Фоторезистор
- Восьмой урок: Датчика движения (PIR) и E-mail
- Девятый урок: Подключение датчика температуры и влажности DHT11 или DHT22
Все посты сайта «Занимательная робототехника» по тегу Arduino.
Наш YouTube канал, где публикуются видео-уроки.
Не знаете, где купить Arduino? Все используемые в уроке комплектующие входят в большинство готовых комплектов Arduino, их также можно приобрести по отдельности. Подробная инструкция по выбору здесь. Низкие цены, спецпредложения и бесплатная доставка на сайтах AliExpress и DealExtreme. Если нет времени ждать посылку из Китая — рекомендуем интернет-магазины Амперка и DESSY. Низкие цены и быструю доставку предлагает интернет-магазин ROBstore. Смотри также список магазинов.
Автор: Александр Гагарин.
Читайте также
39 комментариев к статье “Arduino для начинающих. Урок 4. Управление сервоприводом”
Виктор
16.01.2015
При съёмке видео отодвиньте человека его от стены. Лучше будет.
Алексей
21.01.2015
на видео ошибка в озвучивании цветов сервопривода: Красный для «земли»….. Красный для питания
Занимательная робототехника
02.03.2015
Пример использования схемы: проект «О’кей Google, Сезам, открой дверь». Реализовано открывание двери с помощью голосовой команды. Чтобы попасть в дом, нужно просто сказать: «Сезам, откройся». Описание здесь.
Александр
20.11.2015
Есть переделанный сервопривод для вращения по кругу на 360 градусов, как подредактировать скетч чтобы через каждые 90 градусов останавливался на 3 сек. Пока что он крутится без остановки.
#include
Servo myservo; void setup()
// устанавливаем пин как вывод управления сервой
myservo.attach(10);
> void loop()
// устанавливаем угол 0°
myservo.write(0);
delay(3000);
// устанавливаем угол 90°
myservo.write(90);
delay(3000);
// устанавливаем угол 180°
myservo.write(180);
delay(3000);
// устанавливаем угол 270°
myservo.write(270);
delay(3000);
>
Slaveg
17.08.2017
Похоже забыл подключить соурц файл с кодом для севопривода: #include //используем библиотеку для работы с сервоприводом Хотя он не должен компилироваться в таком случае
Владимир
06.12.2015
Как управлять сервой arduino которая подключена к роутеру на openwrt через веб-морду?
Павел
13.12.2015
очень хорошие уроки. лучше стандартных. все просто . и как введение для новичка не знакомого с програмированием- всамый раз.я даже некоторые вещи сам без помощи уже могу делать
Даниил
12.01.2016
Помогите пожалуйста с программой(
Есть 3 сервопривода, запитанных от отдельного источника питания, нужно чтобы при нажатии одной кнопки сработал сперва один серопривод, а потом сразу же другой, при повторном нажатии первый сервопривод остаётся на месте а второй и третий двигаются ( по градусам сам расставлю), а при нажатиина вторую кнопку сервоприводы возвращались в своё изначальное положение.
Виталий
18.01.2016
Небольшая доработка скетча под управление двумя сервами. Вторую серву подключаем к 8му порту. #include //используем библиотеку для работы с сервоприводом Servo servo; //объявляем переменную servo типа Servo Servo servo1; //объявляем переменную servo типа Servo1 void setup() //процедура setup < servo.attach(10); //привязываем привод 1 к порту 10 servo1.attach(8); //привязываем привод 2 к порту 8 >void loop() //процедура loop < servo.write(0); //ставим вал под 0
servo1.write(0); //ставим вал под 0 delay(2000); //ждем 2 секунды servo.write(30); //ставим вал под 30
servo1.write(180); //ставим вал под 180 delay(2000); //ждем 2 секунды servo.write(60); //ставим вал под 60
servo1.write(0); //ставим вал под 0 delay(2000); //ждем 2 секунды servo.write(90); //ставим вал под 90
servo1.write(180); //ставим вал под 180 delay(2000); //ждем 2 секунды servo.write(120); //ставим вал под 120
servo1.write(0); //ставим вал под 0 delay(2000); //ждем 2 секунды servo.write(150); //ставим вал под 150
servo1.write(180); //ставим вал под 180 delay(2000); //ждем 2 секунды servo.write(180); //ставим вал под 180
servo1.write(0); //ставим вал под 0 delay(2000); //ждем 2 секунды servo.write(90); //ставим вал под 90
servo1.write(90); //ставим вал под 90 delay(2000); //ждем 2 секунды >
Ярослав
30.01.2018
int n = 0;
servo.write(n+30); //ставим вал под 0
n = 0;
servo1.write(n+180); //ставим вал под 0
n = 0;
delay(2000); //ждем 2 секунды
Как проверить сервопривод на работоспособность дома
Сервопривод коллекторный. Выбор и правила подключения.
В этой статье я научу Вас использовать сервоприводы. И покажу схемы подключения.
Данный сервопривод иногда обзывают: Электроприводом, сервомотором, термоприводом и т. д.
Его официальное название электротермический сервопривод ( Проще: Термопривод ). Сервомоторами называют приводы с электромагнитным двигателем
Существуют сервоприводы для трехходовых клапанов информация об этом здесь:
Такой сервопривод (термопривод) можно использовать как для теплого пола, так и для радиаторного отопления. Как для коллектора, так и для термостатического клапана (вентиля). В данном случае мы рассмотрим подключение для теплого пола и подключение радиаторного регулирования.
В этой статье Вы поймете правила подключения такого сервопривода и наконец, закроете все вопросы по автоматическому регулированию отопления.

Данные сервоприводы бывают нормально открытые и нормально закрытые.
Нормально открытый — Открытый клапан по умолчанию. То есть когда на сервопривод не идет сигнал (напряжение), он находится в положение «Открытый клапан». В данном случае при отсутствии напряжения теплоноситель проходит через открытый клапан.
Нормально закрытый — Закрытый клапан по умолчанию. То есть когда на сервопривод не идет сигнал (напряжение), он находится в положение » Закрытый клапан». В данном случае при отсутствии напряжения теплоноситель не проходит через закрытый клапан.
Универсальные, переключающиеся термоприводы — такие термоприводы можно переключать на одно из двух положений: Нормально открытый и нормально закрытый.
Вид сервоприводов может иметь различные формы:

Когда встает вопрос о выборе варианта — открытого или закрытого типа, то нужно понимать следующее:
Если клапан большее время находится в открытом положении, то выбирается режим нормально открытый.
Если клапан большее время находится в закрытом положении, то выбирается режим нормально закрытый.
В условиях суровой зимы выбирается вариант нормально открытый. В частности в России. В теплых краях можно выбирать нормально закрытый. Впрочем, все зависит от множества факторов. Самый распространенный вариант сервоприводов — это нормально открытый. К тому же, когда сервопривод выходит из строя, то нет риска, заморозить помещение от холода.
Сервоприводы по напряжению бывают на 220 вольт, но бывают и на другое напряжение, например, 24 вольт. Также не исключено, что сервоприводы могут принимать постоянный ток или переменный ток. В большинстве случаев это переменный ток 50 Гц.
Чтобы сервопривод начал закрывать или открывать клапан, ему нужен сигнал в виде напряжения. Обычный сигнал сервоприводу — это обычное питание, которое указывается в паспорте сервопривода. (220в/24в).
Как работает сервопривод?

Рассмотрим такой термопривод. Производитель: Oventrop.
Внутри имеется такой механизм:

Принцип действия сервопривода
Принцип действия привода основан на расширении жидкости (толуола) в сильфоне за счет прохождения электрического тока через нихромовый нагревательный элемент.
В механизме сервопривода имеется пружинный механизм и емкость, в которой умещена специальная жидкость, которая под действием температуры расширяется и давит на шток. Шток, выдвигаясь, давит на шток термоклапана и клапан закрывается. Под действием напряжения происходит прогрев жидкости, и жидкость расширяется. То есть этот сервопривод не имеет электромагнитного мотора. Использование силы взято от расширяющейся жидкости под действием температуры, поэтому данный сервопривод обзывают термоприводом. Так как сила движения происходит от расширения жидкости при его нагреве.
Поэтому когда подается напряжение на сервопривод, то привод закрывает клапан не мгновенно, а по истечению некоторого времени, на которое уходит прогрев жидкости. Это около 1-3 минут в зависимости от производителя.
Когда в термоприводе отсутствует напряжение, то клапан приходит в исходное положение, когда достаточно для этого остынет. Остывает сервопривод намного дольше, чем нагревается. Поэтому время открывания термопривода от 5 до 15 минут.
Существуют термоприводы (сервоприводы), в которых нет жидкости для расширения. В таких сервоприводах перемещение штока достигается посредством нагрева компенсационного термоэлемента. Термоэлемент может быть похож на пластину или пружину, которая при нагреве изменяет свое положение. Такое можно наблюдать в электрических термостатах электрических плит.

Слева нагретый сервопривод, справа остывший.

Сверху у сервопривода имеется выдвигающийся механизм, он нужен для того, чтобы:
Во-первых, определять посадку сервопривода в термоклапане.
Во-вторых, уведомляет о режиме клапана: Вкл/Выкл.
То есть если он поднят вверх — это говорит о том, что клапан закрыт. Если он опущен, то клапан открыт.
Если данный механизм имеет на стандартные размеры по высоте, то следует насторожиться. Данный термопривод может не подходить к термоклапану или не правильно быть подключен. То есть размеры выдвигаемого штока не совпадают с термоклапаном.
В сервоприводах стоит защита от перегрева. Там встроен механизм отключения питания.
Данный сервопривод можно проверить на ощупь, если он нагрет — клапан закрыт, если он холодный — клапан открыт.
Данный сервопривод подключается на термостатический клапан коллектора или это может быть отдельный термостатический клапан как показано на изображении:


Электрическая схема сервопривода и термостата на 220 вольт.

Так же можно одним термостатом подключить 2-3 сервопривода.

По поводу тока и напряжения, описано ниже. этот текст отсюда не видать.
Вопрос в том стоит ли соблюдать фазу ноль? Если Вы даже перепутаете фазу с нулем, данная схема все равно будет работать. Но учтите ее, когда вы будите подключать более сложные электронные устройства. В сложных устройствах могут возникать ошибки. В любом случае смотрите паспорта электрического устройства и соблюдайте Фазу и ноль. Фаза (L). Ноль (N). Земля (PE).
Существуют теромприводы с плавной регулировкой! Для таких теромприводов нужен специальный сигнал! Такой сервопривод может называться: Термоэлектронный привод постоянного тока. Обычно он с напряжением 24 Вольт. Управляющий сигнал от 0 до 10 Вольт. То есть для него идет специальный электронный регулятор. Этот электронный регулятор в зависимости от специального электронного температурного датчика, подает необходимое напряжение термоэлектронному приводу. В зависимости от напряжения термоэлектронный привод получает точное положение штока, который давит на термостатический клапан. Данный термоэлектронный привод подойдет там, где необходимо пропускать теплоноситель дозированно, для плавной регулировки. Для теплого водяного пола он не нужен!
Поэтому когда будите покупать или заказывать сервопривод, убедитесь в том, что бы Вы случайно не приобрели термоэлектронный сервопривод. Так как такой привод должен использоваться совместно с электронным регулятором.
Между сервоприводом и термостатом может быть подключен Коммутационный блок, который выглядит таким образом:

Коммутационный блок
Коммутационные блоки для коммутации термостатов и сервоприводов называют по-разному: Коммуникатор зональный, коммутатор для смесительных узлов, клеммная колодка для сервоприводов и насосной логикой, просто коммуникатор и так далее.
Данный коммуникатор служит для передачи управляющих сигналов (вкл/выкл) от комнатных термостатов на сервоприводы термостатических клапанов, управляющих подачей теплоносителя по контурам.
При отсутствии запроса на подачу теплоносителя во все присоединительные контура, реле коммутатора подает команду на отключение циркуляционного насоса смесительного узла.
Коммутаторы, также подразделяются по напряжению и существуют коммутаторы на 220 вольт.
То есть данные коммутаторы могут быть полезны для того чтобы отключить насос, когда все контура закрыты. Существуют коммутаторы с различной программной средой, которые могут быть не менее полезным функционалом для систем регулирования, о которых Вы сможете узнать у производителя.
Некоторые коммутаторы бывают с радиоэлектронным сигналом. Продаются в сборе с термостатами, которые сообщают информацию по средствам радиосигнала. Такие термостаты можно поставить в любое место на стене без прокладки кабеля. В общем, по функциям они очень разннобразны.
Электрическая схема сервопривода, термостата и коммутатора

Для новичков я рекомендую купить сервопривод на 220 вольт с переменным питанием 50 Гц. Для тех, кто живет в России. То есть такой сервопривод можно спокойно подключить к сети питания 220 вольт. В других странах могут быть изменены напряжения сети. При подключении к сети, нормально открытый клапан будет закрываться.
Также рекомендую ознакомиться с мощностью термостатов. Чтобы напряжение и ток в термостате не превышал заданные производителем. Для примера скажу, чтобы не было проблем с перегрузками, берите термостат с напряжением 220 Вольт и с током до 10 Ампер. А сервоприводы на 220 вольт имеют ток около 0, 3 Ампер. Так что перегрузки по токам с таким термостатом не должны быть. Соответственно электропровод по сечению может быть 1-1, 5 мм2.
Электропровод, ведущий от термостата до сервопривода, лучше сделать трех жильным, так как рабочие контакты термостата, имеют три соединения. Общий, рабочий и реверсивный сигнал. На будущее вдруг Вам понадобиться обратный сигнал (противоположная команда) от термостата.
Если Вы плохо разбираетесь в электричестве, то коммутаторы вообще не рекомендую брать. Во-первых, они дорогие. Во-вторых, функцию по отключению насоса можно пережить. Впрочем, Вам решать.
Когда существует вероятность того, что все контура закроются, и насос будет работать на нулевой расход, в этом случае обязательно устанавливают перепускной клапан, который дает расход, когда все контура закрыты.
Комнатный термостат. Комнатные регуляторы температуры.

Электрические комнатные терморегуляторы называют термостатом.
Терморегулятор — это электрический датчик температуры, который посредствам выбранной температуры дает сигнал сервоприводу на закрытие или открытие клапана. В терморегуляторе присутствует возможность выбрать комнатную температуру или механическим способом (рукоятка) или электронным способом (кнопка).
Термостат обладает одним или двумя датчиками температуры. Основной датчик температуры встроен вовнутрь устройства. Он служит для получения температуры воздуха. Другой считается выносным и называется выносным погружным зондом. Выносной зонд нужен для того, чтобы измерять температуру поверхности теплого пола. Его нужно монтировать вовнутрь теплого водяного пола, то есть в бетонное основание теплого пола. Выносной датчик служит для измерения температуры поверхности пола. Данный зонд нужно устанавливать там, где основание пола будет всегда открыто. Также не допускается зонд устанавливать возле окон и дверей где возможен сквозняк. Зонд нужно установить между подающей и обратной трубой. Высота датчика (зонда) должна быть не ниже середины по высоте бетонной стяжки.
Датчик для определения температуры воздуха, должен находиться от пола на расстоянии 0, 8-1, 5 метра. Чем ближе датчик к полу, тем больше он чувствует тепло. Чем дальше, тем меньше он чувствует тепла. Это говорит о том, что если датчик будет дальше от пола, то регулятор температуры будет выставлен больше. Если ближе к полу, то наоборот.
Устанавливается датчик только на внутренних стенах. Внутренняя стена является той стеной, за которой находиться отапливаемое помещение. Наружной стеной — является стена, за которой нет помещений. Наружная стена является холодной. Датчик, установленный на наружной стене, будет обманывать и давать результаты того, что в помещение холодно.
Нельзя заслонять стену (шкафами, полками, столом, креслом, диваном) где стоит датчик температуры воздуха. Данная стена должна быть свободна для естественной циркуляции воздуха через датчик температуры. Для этого подходит стена возле входной двери. Если дверь постоянно открыта, то датчик от двери нужно установить дальше от двери на расстояние примерно 1 м. Возле датчика температуры воздуха нельзя ставить оборудование, которые выделяет тепло.
Необходимо убедиться, что бы возле датчика температуры воздуха не было каких-либо сквозняков, например вентиляции. Теоретически, идеальное место для датчика температуры воздуха, это центр отапливаемого помещения, как по ширине и длине, так и по высоте.
Термостат, обладающий двумя датчиками, может контролировать сразу два параметра: температуру воздуха и температуру пола. В таком термостате задаются пороги отключения для температуры воздуха и температуры пола. Если превысит порог температуры любого из двух датчиков, то идет отключение сервопривода.
Программируемые термостаты

Такие термостаты называют хронотермостатами. В них можно задавать работу сервоприводов по времени и (или) по дням.
Термостаты или коммутаторы с беспроводным датчиком.
Эра новых технологий не стоит на месте и с каждым десятилетием появляются новые изобретения. Скажу лишь то, что такие термостаты существуют. Панель управления термостатов может быть установлена в любом месте, а вот термодатчик определяющий, температуру может находиться там, где это необходимо. Термодатчик по средствам радиосигнала посылает команду термостату.
Подписаться на рассылку
Оставьте свой E-mail и мы на него отправим новые интересные статьи и видео о расчетах водоснабжения и отопления