Чем отличается сервопривод от электропривода?

Сервопривод ― это модернизированный и усовершенствованный электропривод с обратной отрицательной связью, обеспечивающий более точное позиционирование, скорость вращения, угол поворота.
Электропривод или шаговый двигатель
Электропривод или шаговый двигатель – электродвигатель с дискретным вращением ротора. Шаг вращения задается определенной последовательностью, количеством электронных импульсов, подаваемых на обмотку статора. Для одного полного оборота вала нужно определенное количество и частота импульсов, чем меньше шаг, временной промежуток между импульсами, тем точнее позиционирование электропривода.
Электронные импульсы электропривода декодируются драйвером, который управляется контроллером электропривода.
Обратной связи для настройки и контроля работы электропривода не требуется, так как угол поворота вала двигателя контролируется количеством и частотой подаваемых электронных импульсов.
Электроприводы имеют малую мощность, но отличаются высокой точностью позиционирования, шаг угла поворота может варьироваться от 90 до 0.9 градусов.
Сервоприводы

Сервопривод – электродвигатель, оборудованный контрольным датчиком, который обеспечивает обратную связь между блоком управления и мотором. Контроллер фиксирует мотор в нужном положении, что позволяет электродвигателю работать на высоких скоростях с точностью до микрона.
При подаче электронного импульса на электродвигатель, он начинает вращаться, шаг вращения будет определяться частотой и периодичностью подачи импульсов. В сервоприводах для точной фиксации ротора в нужном положении контроллер постоянно переключает заряд импульсов, ориентируясь на отклик состояния ротора в данный момент времени.
Такой контроль положения ротора исключает отклонения угла наклона, моментально исправляет ошибки, оперативно изменяя направление вращения двигателя даже на высоких скоростях, точно контролируя шаг поворота.
Сравнение характеристик электроприводов (шаговых двигателей) и сервоприводов
На малых скоростях погрешность 0.01 мм
C контурным управлением – погрешность 0.002 мкм на любой скорости;
позиционным управлением – погрешность 0.3 – 1 мм
до 120 об/мин за минуту
от 500 об/мин за 0.1 сек
Принудительная аварийная остановка
Не сказывается на характеристиках двигателя
Может вызвать перегрев, сгорание электродвигателя
Нельзя сказать, что сервопривод лучше или хуже электропривода, просто эти устройства могут применяться для решения разных технических задач.
- Невысокая стоимость благодаря простой конструкции
- Работа на низких оборотах, без установки дополнительных редукторов
- Точность позиционирования угла поворота
- Механическая прочность, стойкость к частым аварийным остановкам
Недостатки – нельзя выполнить индивидуальную корректировку и настройку по положению, работает на заводских настройках. Крутящий момент на высоких скоростях снижается.
- Гибкая настройка и позиционирование
- Высокая скорость работы
- Интенсивное ускорение
- Регулировка крутящего момента при ускорении
Недостатки – требовательность к системам управления, настройкам и корректировке режима работы, низкая ремонтопригодность, высокая стоимость.
Примеры моделей, область применения сервоприводов и электроприводов
Электроприводы для клапанов систем вентиляции, кондиционирования, отопления и охлаждения, газоснабжения:
- Honeywell ML7421A3004 – для проходных, 3-ходовых регулирующих клапанов с ручным и автоматическим управлением
- Honeywell M7410A1001-3М – для гелиосистем и фанкойлов с 3-х позиционной регулировкой
- Siemens SAS – 3-х позиционный и динамический сигнал управления, напряжение 24 и 230 V, в зависимости от модели, время поворота от 30 до 120 сек, модели с возвратным пружинным механизмом и без, предусмотрена возможность перехода на ручное управление
- Siemens SK – применяются как регулирующие и стопорные для 2-х и 3-х ходовых клапанов, с шагом 20 мм, время возврата пружины в диапазоне 10 – 15 сек, диапазон срабатывания на открытие/закрытие – 15 – 120 сек
- Прома DMI-32 – электропривод регулировки расхода газа, 3-х позиционный, поворот заслонки от 0° до 90°. Потенциометр обеспечивает гибкий контроль промежуточного положения заслонки
- Electromotoric Siemens Комби – регулирующие электроприводы, со светодиодной индикацией положения и состояния, дискретным позиционированием (20 мм: 40, 60, 90 или 120 х 40 мм: 80, 120, 180 или 240 с). Есть вспомогательные переключатели, потенциометр, могут работать на переменном токе 230 Дополнительные функции с вспомогательными переключателями, потенциометр и переменный ток 230V
Сервоприводы для газовых заслонок:
- Dungs SAD1.5 – для горелок BALTUR. Обеспечивает регулировку угла поворота заслонки для получения максимального КПД работы системы отопления. Программируемое время открытия на нужный угол поворота (до 90 градусов), низковольтный шаговый электродвигатель, низкое энергопотребление
- Honeywell V9055 – промышленный сервопривод с точным модулирующим управлением подачи газа
- Siemens SQN 90– сервопривод поворота заслонки для одно, двухступенчатых и модулируемых горелок малой и средней мощности на газе и жидком топливе. Усилие до 2,4 Нм, срабатывание на 90° — до 24 секунд.
В каталоге Avitek-I всегда можно подобрать модель сервопривода или электропривода с нужными техническими характеристиками. В ассортименте продукция только оригинальных сертифицированных российских и зарубежных брендов всей номенклатуры модификаций для промышленного, производственного, коммунального и бытового применения.
Особенности электродвигателя
Электрический двигатель – сложная система, компоненты которой способны перерабатывать электрическую энергию, преобразовывая ее в механическую. Она требуется для активации всевозможных механизмов. Электрический двигатель – ведущий компонент электропривода. В зависимости от режима функционирования электродвигатель может выполнять преобразование энергии в обратном направлении, то есть преобразовывать механическую энергию в электрическую – в этом случае он работает как электрогенератор.
Устройства отличаются по разным параметрами, включая тип механического движения, которое формируют. По этим характеристикам они могут быть вращающимися, линейными и другими. Под понятием электрического двигателя зачастую подразумевается вращающаяся система, которая пользуется сегодня повышенным спросом.
Как работает электродвигатель
В принцип функционирования заложена электромагнитная индукция. Это механизм образования электрополя или тока, что происходит ввиду воздействия колеблющегося магнитного поля. Любое электрическое поле, склонно к изменениям, формирует магнитное – взаимодействие этих двух факторов способствует отталкиванию или притягиванию компонентов статора и ротора.
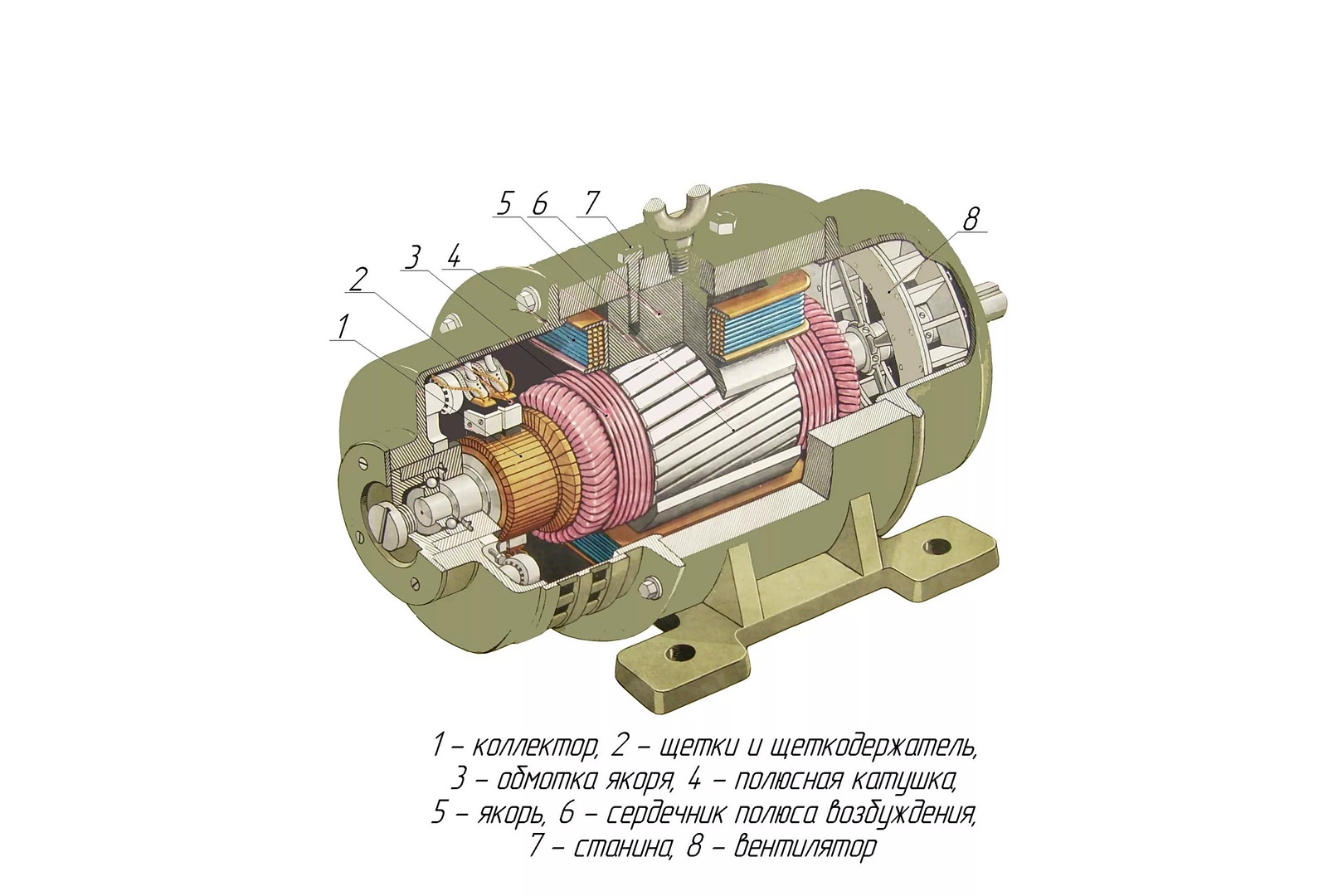
Из чего состоит агрегат
Электродвигатель вращающегося типа состоит из двух основных частей:
статора и ротора. Первый относится к статичным компонентам, второй – к вращающимся. Также в конструкции предусмотрен якорь. Это обмотка, которая является проводником тока при функционировании мотора. Якорь бывает статичным или активным. Зачастую таким наименованием характеризуются подвижный элемент в различных приборах, вырабатывающих электромагнитное поле.
Какие электродвигатели сегодня наиболее актуальны
Существуют разные вариации электрических двигателей, но наиболее востребованными считаются асинхронные и модели постоянного тока
Асинхронные
Отличаются относительно низкой ценой по сравнению с конкурентами. Обладают простой конструкцией. И эти два фактора делают изделие широко востребованным в разных сферах. Особенность конструкций заключается в таком параметре, как скольжение. Он предполагает разницу между частотой вращения магнитного поля статичного элемента и скорости движения ротора. Напряжение на динамичном компоненте машины индуцируется благодаря переменному магнитному полю обмоток статора. Вращение продуцирует взаимодействие электромагнитов неподвижного элемента и магнитного поля ротора, которое образуется ввиду сформированных в нем вихревых токов. По типам обмоток статора бывают двигатели:
- Однофазные – агрегаты могут работать только при наличии внешнего фазосдвигающего компонента, например, конденсатора или индуктивного прибора. Эти двигатели отличаются незначительной мощностью.
- С двумя фазами – машины, которые оснащаются двумя обмотками со смещенными по отношению друг к другу фазами. Модели часто встречаются в бытовой технике, а также в оборудовании, которое не требует мощного электродвигателя.
- С тремя и более фазами – многофазные электрические машины, оснащенные тремя+ обмотками статора, смещенными на определенный угол.
Обмотка ротора электродвигателей первого вида – это стержни, которые лишены изоляции, и изготовлены из сочетания меди и алюминия. Они замкнуты с двух сторон кольцами. Такие электродвигатели обладают внушительным набором сильных сторон:
- Упрощенная система пуска. Также оборудование допускает подключение к электросети посредством устройств коммутации.
- Допустимы короткие нагрузки среднего уровня.
- Могут входить в конструкцию оборудования, эксплуатация которого требует высокой мощности. Моторы этого вида не включают в состав скользящих контактов, которые могут минимизировать мощность.
- Несложное техническое обслуживание и ремонтные работы. Это обусловлено тем, что специалисту не потребуется много времени на разборку простой конструкции.
- Невысокая стоимость – модели стоят значительно дешевле синхронных аналогов.
Среди недостатков асинхронных машин можно отметить:
- Невысокая предельная мощность.
- Сложно реализовать возможность корректировки количества вращений за определённую единицу времени.
- Требует высоких стартовых токов при прямом запуске.
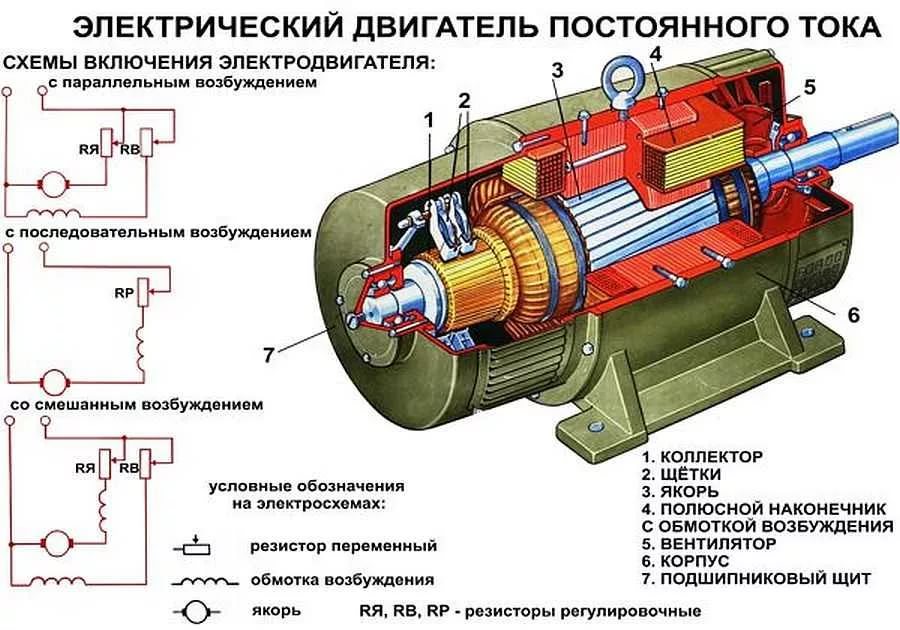
Электродвигатели постоянного тока
Еще один вариант часто используемых электрических машин, которые активно применяются в электрическом транспорте, промышленных аппаратах, в исполнительных механизмах.
Моторы постоянного тока имеют много преимуществ:
- Доступна корректировка частоты вращения посредством изменения уровня напряжения в обмотке. Крутящий момент двигателя постоянного тока остается на едином уровне.
- Большой коэффициент полезного действия – этот параметр в ДПТ несколько выше, чем у самых продвинутых асинхронных моделей. При средней нагрузке на валу коэффициент полезного действия возрастает примерно на десять или пятнадцать процентов.
- Относительно компактные размеры, что позволяет использовать ДПТ в качестве микроприводов для различных механизмов.
- Простое управление. Для старта, реверса, корректировки скорости нет необходимости в покупке сложного и дорогостоящего оборудования, в наличии множества устройств коммутации.
- Способен преобразовывать механическую энергию в электрическую – работать в качестве генератора. Двигатели такого плана подходят в качестве стабильных источников постоянного электричества.
- Пусковой момент, позволяющий использовать машину в сочетании с кранами, тяговыми механизмами, конструкциями, предназначенными для подъема грузов.
Двигатели постоянного тока оборудуются:
- Постоянными магнитами – модели одеты в компактные корпуса, и зачастую применяются как микроприводы;
- Электромагнитным возбуждением – наиболее популярное решение, которое используется в бытовой технике, всевозможном оборудовании.
Электрические моторы с электромагнитным возбуждением различаются по типу обмотки статора:
- С параллельным возбуждением – якорь и статор в этом случае подключены параллельно по отношению друг к другу. Такие модели не нуждаются в дополнительном источнике питания, а скорость, с которой вращается ротор, не диктуется оказываемой нагрузкой. Подобный вариант уместен для применения в сочетании с оборудованием, которое решает задачи резки металла и в других целях.
- С последовательно подключаемой обмоткой статора. Двигатели этой разновидности обладают высоким пусковым моментом. Они актуальны для транспорта, двигающегося от электричества, в промышленных машинах, где есть нужда в пуске под значительной нагрузкой.
- Смешанное возбуждение. Элемент возбуждения в таких машинах состоит из двух частей. Первая подключена параллельно, вторая – последовательно якорю. Двигатели этой разновидности нужны для функционирования оборудования, требующего высокого пускового момента.
Методы управления электрическими двигателями на практике
Управление электрическими машинами предполагает возможность коррекции таких характеристик, как скорость и мощность. К примеру, если на асинхронную машину подать напряжение определенного параметра, она будет продуцировать вращения с номинальной мощность – выйти за эти пределы оборудование не способно. При необходимости снизить или увеличить скорость вращения применяются преобразователи частот. Они призваны сформировать требуемый ритм разгона и остановки, что позволяет быстро и беспроблемно корректировать частоту функционирования агрегата.
Чтобы создать нужный разгон и торможение без вмешательства в частоту к работе привлекают устройства плавного пуска. При необходимости в управлении исключительно сценарием старта агрегата внедряют систему «звезда-треугольник». Для активации мотора без устройства плавного пуска актуальны специальные контакторы – с их помощью пуском, тормозом и другими параметры управляют на расстоянии, то есть дистанционно.
Прозвон и сопротивление
Асинхронное оборудование зачастую оснащено 3 обмотками. Каждая из них имеет 2 вывода – их помечают в клеммной коробке. Если выводы доступны, их можно прозвонить с целью получения параметра сопротивления и его сравнения с величинами, снятыми с остальных обмоток. Если величины сопротивления отличаются на один процент и менее, то с высокой вероятностью проблем в работе не имеется.
Для вычисления сопротивления обмоток применяется такой прибор, как омметр. Также следует знать, чем выше мощность агрегата, тем меньше показатель сопротивления обмоток.
Вычисление мощности электрического двигателя
Самый простой метод, который может помочь в определении номинальной мощности двигателя – шильдик. На детали прописана механическая мощность – ее значение зачастую ниже той, которая потребляется, что обусловлено потерями на нагреве и трении. Но если шильдик на системе отсутствует, можно использовать визуальный инструмент – оценка по размерам оборудования. Если мотор оснащен валом большого диаметра, его мощность будет достаточно высокой и наоборот.
Также параметр мощности вычисляется по нагрузке и настройкам, выставленным на защитных приборах, которые подают питание на агрегат. Еще один вариант – старт двигателя на номинальной мощности, что даст валу нагрузку. После этого следует измерить ток специальными клещами. Показатель должен быть идентичен по всем обмоткам. Для определения примерной мощности асинхронной машины, которая подключена по алгоритму «звезда», номинальный ток делят на двое.
Увеличение и уменьшение оборотов
Такая функция, как корректировка скорости вращения требуется в следующих режимах функционирования:
Для этого лучше всего прибегнуть к специальному прибору – частотному преобразователю. Корректировка настроек позволяет достичь различной частоты вращения – она зависит от технических параметров электродвигателя. При этом доступно управление другими настройками оборудования, анализ его состояния во время активности. Можно изменять показатель частоты в плавном и ступенчатом режиме.
Управление оборотами на старте и при установке выполняется посредством устройства плавного пуска. Этот прибор уменьшает пусковой ток благодаря медленному разгону и постепенному повышению оборотов.
Особенности вычисления тока и мощности прибора
Если ток асинхронного устройства известен (узнать можно по шильдику или с помощью изменений в номинальном режиме), но при этом мощность остается неизвестной. В этом случае следует прибегнуть к формуле: Р = I (1,73·U·cosφ·η):
- P – полезная мощность в номинальном состоянии в Ваттах (этот параметр производители зачастую указывают на шильдике).
- I – показатель тока агрегата.
- U – напряжение питания обмоток.
- Cosφ – коэффициент мощности.
- η – КПД.
Если мощность известна, и требуется узнать ток, используют формулу: I = P/(1,73·U·cosφ·η).
Для оборудования с мощность более 1.5 кВт, с подключением типа «звезда» используют правило – для примерного расчёта показателя тока его мощность умножают на два.
Настройка мощности: увеличение
Мощность, которую производитель дублирует на шильдике мотора, зачастую ограничена допустимым током, то есть – нагревом корпуса. При повышении показателя требуется предпринять ряд действий, которые направлены на нормализацию температуры корпуса привода двигателя. Например, выполнив установку самостоятельного вентилятора.
При применении преобразователя частоты для увеличения мощности частоту можно изменить посредством ШИМ, но при этом не стоит допускать чрезмерного нагревания преобразователя частоты. Параметр также можно изменить с помощью редуктора или ременной передачи, однако число оборотов при этом уменьшится.
Если вышеперечисленные рекомендации не позволяют справиться с поставленной задачей, остается единственный выход из ситуации – заменить маломощный движок на более производительный.
Потеря мощности при подключении 3-фазного двигателя к 1-фазной сети
Такой формат подключения предполагает использование пускового и рабочего конденсатора для сдвига фазы. Номинальная мощность на валу в этом случает останется неизвестной, а потеря составит около тридцати процентов от номинала. Это обусловлено отсутствием возможности сформировывать перекос по фазам при колебании нагрузок.
Исполнения двигателей
Электрические двигатели отличаются методом установки, степенью защиты, по климатическому предназначению. Асинхронные модели устанавливаются одним из двух методов:
- на лапах;
- посредством фланца.
Двигатели, отличающиеся по климатическому исполнению, применяются в разных условиях. Это может быть умеренный климат, преимущественно низкая температура или средняя, жаркое время года. Также двигатели предназначаются для размещения в разных условиях, например, в стенах помещения, на свежем воздухе, под определенной защитой, например, под навесом, который будет защищать оборудование от осадков.
Производители присваивают продукции определенный класс защиты, который чаще всего характеризует степень защищенности от пыли, воды. Зачастую в продаже представлены приводы с сертификацией IP 55.
Для чего двигателю нужен тормоз
В некоторых видах оборудования, например, в лифтах, грузоподъемных устройствах, при торможении мотора нужна фиксация вала в статичном положении. Для этого используется электромагнитный тормоз, включённый в состав агрегата – он прикреплен к тыльной части. Управление этим компонентом выполняется посредством частотного преобразователях или микросхемы.
Как двигатель обозначается на электрических схемах
Электрический двигатель отображается на схемах посредством буквы «M», которая очерчена кругом. Также схемы могут включать порядковый номер продукта, число фаз, разновидность тока, метод подключения обмоток, показатель мощности.
Причины перегрева двигателя
Двигатель – активное оборудование, которое может перегреваться, а причинами этому являются:
- естественный износ подшипников, что создает более активное трение между деталями и провоцирует перегрев;
- высокая нагрузка в области вала;
- некорректное напряжение;
- пропадание фазы;
- короткое замыкание, произошедшее в обмотке;
- отсутствие нормального охлаждения.
Нагрев электродвигателя в негативном ключе отражается на его долговечности и коэффициенте полезного действия. Также высокая температура может со временем спровоцировать износ привода. В этом случае может потребоваться сложный и дорогостоящий ремонт или полная замена агрегата.
Частые неисправности электродвигателей
Отмечают два типа поломок, к которым склонны большинство моделей электрических двигателей. Они могут носить механический и электрический характер.
Электрические неисправности
Предполагают проблемы в обмотке:
- замыкание между витками;
- замыкание обмотки на корпус;
- механическое повреждение обмотки.
Механические неисправности
- естественный износ в подшипниках, повешенное трение;
- прокручивание ротора на валу;
- износ корпуса мотора;
- поломка, связанная с повреждением крыльчатки обдува
Чтобы не допускать проблемных ситуаций, пользователю следует позаботиться о своевременной замене подшипников. Важно учитывать их износ, срок эксплуатации мотора. Это же относится к другим деталям. Электрические неисправности требуют только профессионального ремонта, ведь неаккуратное действие со стороны пользователя может потребовать замены всего агрегата.
Как применяются электрические двигатели
На сегодня электродвигатели – основные потребители энергии. Около 50% этого ресурса приходится на различные варианты оборудования. Двигатели широко востребованы во многих сферах промышленности и жизни в целом. Они применяются для работы бытовой техники, производственного оборудования, для транспорта, спецтехники.
Основные направления, в которых используется это оборудование:
- металлообрабатывающие и шлифовальные предприятия;
- деревообрабатывающие заводы, конвейерное производство;
- для изготовления компрессионного, климатического оборудования;
- в строительной сфере – моторы включены в конструкции спецтехники и оборудования для подъёма, опускания строительного оборудования;
- в системах лифтов, в отопительном оборудовании, в системах вентиляции;
- в бытовых устройствах, начиная холодильником, заканчивая уборочной техникой;
- для персональных компьютеров, ноутбуков.
Преимущества электрических двигателей
Это оборудование имеет множество сильных сторон, которые обеспечивают его востребованность:
- относительно простые конструкции;
- простая установка и эксплуатация;
- пригодность к ремонту – благодаря высококачественным компонентам, которые используют производители, современные двигатели способны стабильно работать годами;
- в продаже доступен солидный выбор устройств, отличающихся мощностью и другими техническими характеристиками. Благодаря этому найти вариант под определенное оборудование не составит труда;
- доступность опции регулировки скорости вращения вала мотора;
- высокая скорость функционирования, готовность к запуску и остановке;
- автоматическое управление оборудованием, доступное в большинстве случаев;
- функция реверса;
- для установки и технического обслуживания со стороны пользователя не потребуется крупных финансовых вложений;
- длительный эксплуатационный период;
- высокий коэффициент полезного действия;
- оборудование изготавливается из экологически безопасных материалов и компонентов. Работа двигателя не предполагает негативное влияние на здоровье пользователей и состояние природы.
Но к главному достоинству электрического привода можно отнести возможность его контроля и регулировки, при этом местоположение оборудования не имеет принципиального значения – можно включать и отключать устройство на расстоянии. Эклектический мотор не продуцирует неприятного шума, не способен нанести вреда здоровью человека в отличие от механических аналогов.
Похожие статьи

Горизонтальный и вертикальный тип
По местам нахождения осей вращения быстроходного и тихоходного вала в пространстве все механические устройства делятся на вертикальные и горизонтальные. Горизонтального типа В эту группу входят механизмы с осями, находящимися в единой горизонтальной плоскости, при том возможно параллельное и п..

Как узнать мощность электродвигателя?
Чаще всего мощность двигателя обозначена в техническом паспорте к устройству и продублирована на корпусе, где есть специальная наклейка или планка с основными техническими параметрами. Однако нередко случается, что данные на корпусе являются не читаемыми, а технический паспорт давно утерян. Ка..

Все что стоит знать о зубчатой муфте, ее разновидностях, приемке и транспортировке
Зубчатая муфта — это устройство, которое используется для передачи вращающего момента между двумя валами, которые должны иметь возможность переключаться между вращением в синхронном или асинхронном режимах. Она состоит из двух основных компонентов – муфты с внутренними зубьями и муфты с наружными..

Муфты – назначение, разновидности и правила работы
Муфта – это устройство, которое используется для соединения и разъединения вращающихся частей механизма. Оно передает крутящий момент с одной вращающейся части на другую без какого-либо напряжения на соединительной точке. Муфты используются в автомобильной промышленности, самолетостроении, производс..
Двигатель и привод — в чем разница?
Очень важно понимать разницу между двигателями и приводами. Двигатель (мотор) — это механическое или электрическое устройство, генерирующее вращательное или линейное усилие, используемое для движения механизмов. К двигателю обычно также прилагается устройство управления, называемое драйвер — это электронное устройство, управляющее электрической энергией, передаваемой мотору. Драйвер обеспечивает двигатель электроэнергией различной амплитуды и частоты, косвенно управляя скоростью и крутящим моментом мотора.
Существуют две основные разновидности управляющих устройств: стандартный инвертор (преобразователь частоты) с управлением только частотой вращения и крутящим моментом, и серводрайвер (сервоусилитель) с управлением не только частотой вращения и крутящим моментом, но и позиционированием компонентов оборудования при выполнении операций, требующих сложного движения узлов механизма. В отдельных случаях на мотор в ЧРП можно установить энкодер, и создать систему с обратной связью по положению, получив опять же сервопривод.
Устройство управления вместе с мотором и образуют узел, называемый «привод».
Электродвигатели
Электрический двигатель, сокращенно электродвигатель — электрическая машина, с помощью которой электрическая энергия преобразуется в механическую, для приведения в движение различных механизмов. Электродвигатель является основным элементом электропривода.
В некоторых режимах работы электропривода электродвигатель осуществляет обратное преобразование энергии, то есть работает в режиме электрического генератора.
По виду создаваемого механического движения электродвигатели бывают вращающиеся, линейные и др. Под электродвигателем чаще всего подразумевается вращающий электродвигатель, так как он получил наибольшее применение.
Областью науки и техники изучающей электрические машины является — электромеханика. Принято считать, что ее история начинается с 1821 года, когда был создан первый электродвигатель М.Фарадея.
Конструкция электродвигателя
Основными компонентами вращающегося электродвигателя являются статор и ротор. Статор — неподвижная часть, ротор — вращающаяся часть.
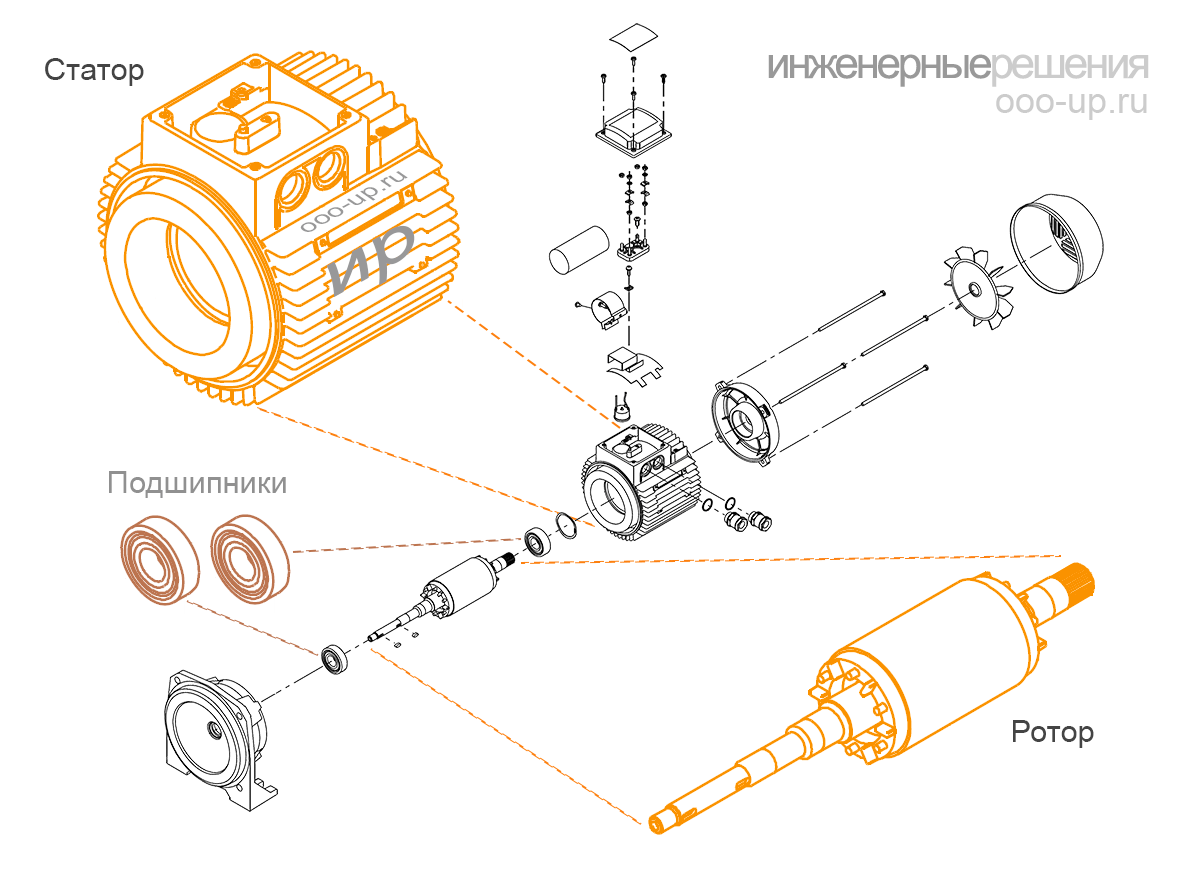
Стандартная конструкция вращающегося электродвигателя
У большей части электродвигателей ротор располагается внутри статора. Электродвигатели у которых ротор находится снаружи статора называются электродвигателями обращенного типа.
Принцип работы электродвигателя
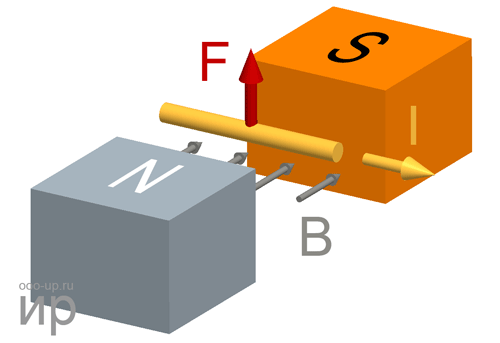
1. Согласно закону Ампера на проводник с током I в магнитном поле будет действовать сила F.
2. Если проводник с током I согнуть в рамку и поместить в магнитное поле, то две стороны рамки, находящиеся под прямым углом к магнитному полю, будут испытывать противоположно направленные силы F
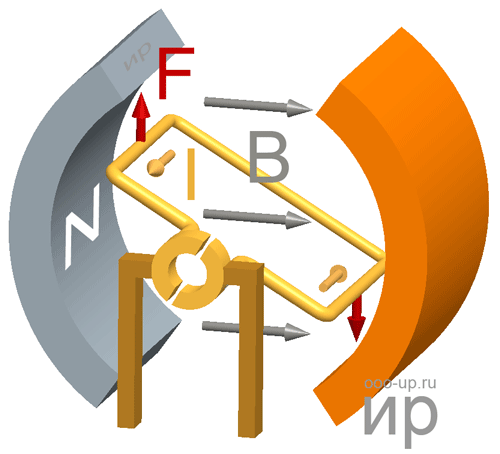
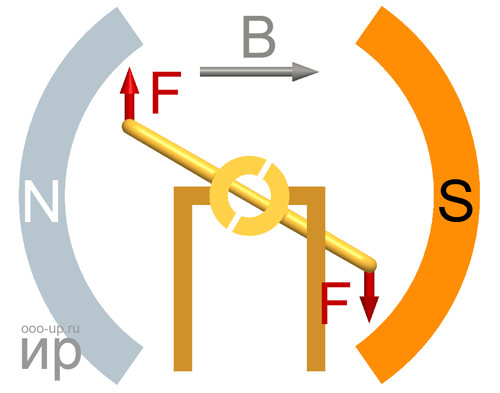
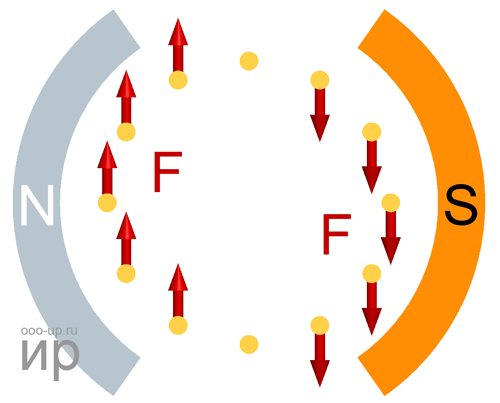
3. Силы, действующие на рамку, создают крутящий момент или момент силы, вращающий ее.
4. Производимые электродвигатели имеют несколько витков на якоре, чтобы обеспечить больший постоянный момент.
5. Магнитное поле может создаваться как магнитами, так и электромагнитами. Электромагнит обычно представляет из себя провод намотанный на сердечник. Таким образом, по закону электромагнитной индукции ток протекающий в рамки будет индуцировать ток в обмотки электромагнита, который в свою очередь будет создавать магнитное поле.
-
Подробное описание принципа работы электродвигателей разных типов:
- Принцип работы однофазного асинхронного электродвигателя
- Принцип работы трехфазного асинхронного электродвигателя
- Принцип работы синхронного электродвигателя
Классификация электродвигателей
- Универсальный
- Репульсионный
- КДПТ с обмоткой возбуждения
-
Включение обмотки
- Независимое
- Последовательное возбуждения
- Параллельное
- Комбинированное
- БДПТ
(Бесколлекторный двигатель + ЭП |+ ДПР) - ВРД
(Реактивный двигатель с ротором с явновыраженными полюсами и сосредоточенной обмоткой статора + ЭП |+ ДПР)
- Трехфазный
(многофазный)- АДКР
- АДФР
- с пусковой обмоткой
- с экранированными полюсами
- с асимметричным магнитопроводом
- СДОВ
(с контактными кольцами и щетками) —> - СДПМ 5 —>
- СДПМВ
- СДПМП
- Гибридный
Примечание:
- Указанная категория не представляет отдельный класс электродвигателей, так как устройства, входящие в рассматриваемую категорию (БДПТ, ВРД), являются комбинацией бесколлекторного двигателя, электрического преобразователя (инвертора) и, в некоторых случаях, — датчика положения ротора. В данных устройствах электрический преобразователь, в виду его невысокой сложности и небольших габаритов, обычно интегрирован в электродвигатель.
- Вентильный двигатель может быть определен как электрический двигатель, имеющий датчик положения ротора, управляющий полупроводниковым преобразователем, осуществляющим согласованную коммутацию обмотки якоря [5].
- Вентильный электродвигатель постоянного тока — электродвигатель постоянного тока, вентильное коммутирующее устройство которого представляет собой инвертор, управляемый либо по положению ротора, либо по фазе напряжения на обмотки якоря, либо по положению магнитного поля [1].
- Электродвигатели используемые в БДПТ и ВРД являются двигателями переменного тока, при этом за счет наличия в данных устройствах электрического преобразователя они подключаются к сети постоянного тока.
- Шаговый двигатель не является отдельным классом двигателя. Конструктивно он представляет из себя СДПМ, СРД или гибридный СРД-ПМ.
Аббревиатура:
- КДПТ — коллекторный двигатель постоянного тока
- БДПТ — бесколлекторный двигатель постоянного тока
- ЭП — электрический преобразователь
- ДПР — датчик положения ротора
- ВРД — вентильный реактивный двигатель
- АДКР — асинхронный двигатель с короткозамкнутым ротором
- АДФР — асинхронный двигатель с фазным ротором
- СДОВ — синхронный двигатель с обмоткой возбуждения
- СДПМ — синхронный двигатель с постоянными магнитами
- СДПМП — синхронный двигатель c поверхностной установкой постоянных магнитов
- СДПМВ — синхронный двигатель со встроенными постоянными магнитами
- СРД — синхронный реактивный двигатель
- ПМ — постоянные магниты
- ЧП — частотный преобразователь
Типы электродвигателей
Коллекторные электродвигатели
Коллекторная машина — вращающаяся электрическая машина, у которой хотя бы одна из обмоток, участвующих в основном процессе преобразования энергии, соединена с коллектором [1]. В коллекторном двигателе щеточно-коллекторный узел выполняет функцию датчика положения ротора и переключателя тока в обмотках.

Универсальный электродвигатель
Может работать на переменном и постоянном токе. Широко используется в ручном электроинструменте и в некоторых бытовых приборах (в пылесосах, стиральных машинах и др.). В США и Европе использовался как тяговый электродвигатель. Получил большое распространение благодаря небольшим размерам, относительно низкой цены и легкости управления.
Коллекторный электродвигатель постоянного тока
Электрическая машина, преобразующая электрическую энергию постоянного тока в механическую. Преимуществами электродвигателя постоянного тока являются: высокий пусковой момент, быстродействие, возможность плавного управления частотой вращения, простота устройства и управления. Недостатком двигателя является необходимость обслуживания коллекторно-щеточных узлов и ограниченный срок службы из-за износа коллектора.
Бесколлекторные электродвигатели
У бесколлекторных электродвигателей могут быть контактные кольца с щетками, таким образом не надо путать бесколлекторные и бесщеточные электродвигатели.
Бесщеточная машина — вращающаяся электрическая машина, в которой все электрические связи обмоток, участвующих в основном процессе преобразования энергии, осуществляются без скользящих электрических контактов [1].
Асинхронный электродвигатель
Наиболее распространенный электродвигатель в промышленности. Достоинствами электродвигателя являются: простота конструкции, надежность, низкая себестоимость, высокий срок службы, высокий пусковой момент и перегрузочная способность. Недостатком асинхронного электродвигателя является сложность регулирования частоты вращения.
Cинхронный электродвигатель
Синхронные двигатели обычно используются в задачах, где требуется точное управление скоростью вращения, либо где требуется максимальное значение таких параметров как мощность/объем, КПД и др.
- С обмоткой возбуждения
- С постоянными магнитами
- Реактивный
- Гистерезисный
- Реактивно-гистерезисный
- Шаговый
Специальные электродвигатели
Серводвигатель
Серводвигатели не являются отдельным классом двигателей. В качестве серводвигателя могут использоваться электродвигатели постоянного и переменного тока с датчиком положения ротора. Серводвигатель используется в составе сервомеханизма для точного управления угловым положением, скоростью и ускорением исполнительного механизма. Для работы серводвигатель требует относительно сложную систему управления, которая обычно разрабатывается специально для сервопривода.
Основные параметры электродвигателя
- Момент электродвигателя
- Мощность электродвигателя
- Коэффициент полезного действия
- Номинальная частота вращения
- Момент инерции ротора
- Номинальное напряжение
- Электрическая постоянная времени
- Механическая характеристика
Момент электродвигателя
Вращающий момент (синонимы: вращательный момент, крутящий момент, момент силы) — векторная физическая величина, равная произведению радиус вектора, проведенного от оси вращения к точке приложения силы, на вектор этой силы.

,
- где M – вращающий момент, Нм,
- F – сила, Н,
- r – радиус-вектор, м
Справка: Номинальный вращающий момент Мном, Нм, определяют по формуле
,
- где Pном – номинальная мощность двигателя, Вт,
- nном — номинальная частота вращения, мин -1 [4]
Начальный пусковой момент — момент электродвигателя при пуске.
Справка: В английской системе мер сила измеряется в унция-сила (oz, ozf, ounce-force) или фунт-сила (lb, lbf, pound-force)
1 oz = 1/16 lb = 0,2780139 N (Н)
1 lb = 4,448222 N (Н)момент измеряется в унция-сила на дюйм (oz∙in) или фунт-сила на дюйм (lb∙in)
1 oz∙in = 0,007062 Nm (Нм)
1 lb∙in = 0,112985 Nm (Нм)Мощность электродвигателя
Мощность электродвигателя — это полезная механическая мощность на валу электродвигателя.
Механическая мощность
Мощность — физическая величина, показывающая какую работу механизм совершает в единицу времени.

,
- где P – мощность, Вт,
- A – работа, Дж,
- t — время, с
Работа — скалярная физическая величина, равная произведению проекции силы на направление F и пути s, проходимого точкой приложения силы [2].

,
- где s – расстояние, м
Для вращательного движения

,

- где – угол, рад,

,

- где – углавая скорость, рад/с,
Таким образом можно вычислить значение механической мощности на валу вращающегося электродвигателя

Справка: Номинальное значение — значение параметра электротехнического изделия (устройства), указанное изготовителем, при котором оно должно работать, являющееся исходным для отсчета отклонений.
Коэффициент полезного действия электродвигателя
Коэффициент полезного действия (КПД) электродвигателя — характеристика эффективности машины в отношении преобразования электрической энергии в механическую.

,

- где – коэффициент полезного действия электродвигателя,
- P1 — подведенная мощность (электрическая), Вт,
- P2 — полезная мощность (механическая), Вт
-
При этом потери в электродвигатели обусловлены:
- электрическими потерями — в виде тепла в результате нагрева проводников с током;
- магнитными потерями — потери на перемагничивание сердечника: потери на вихревые токи, на гистерезис и на магнитное последействие;
- механическими потерями — потери на трение в подшипниках, на вентиляцию, на щетках (при их наличии);
- дополнительными потерями — потери вызванные высшими гармониками магнитных полей, возникающих из-за зубчатого строения статора, ротора и наличия высших гармоник магнитодвижущей силы обмоток.
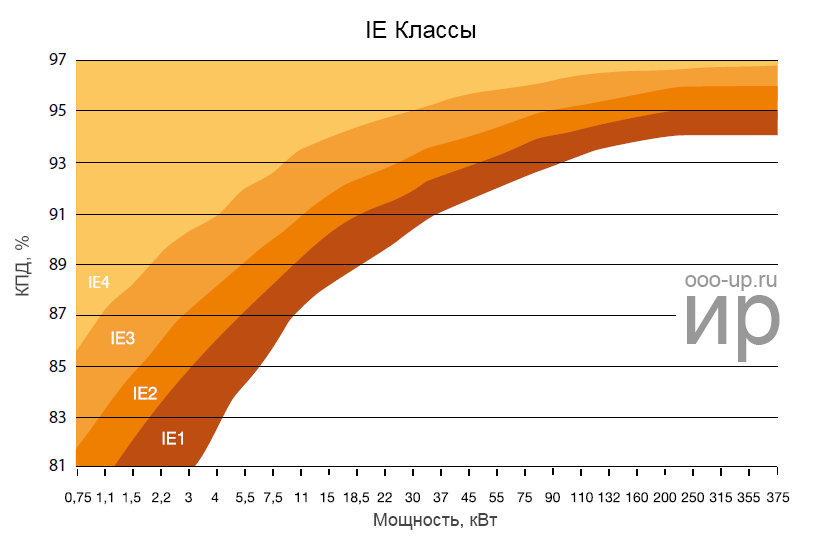
КПД электродвигателя может варьироваться от 10 до 99% в зависимости от типа и конструкции.
Международная электротехническая комиссия (International Electrotechnical Commission) определяет требования к эффективности электродвигателей. Согласно стандарту IEC 60034-31:2010 определено четыре класса эффективности для синхронных и асинхронных электродвигателей: IE1, IE2, IE3 и IE4.
Частота вращения

- где n — частота вращения электродвигателя, об/мин
Момент инерции ротора
Момент инерции — скалярная физическая величина, являющаяся мерой инертности тела во вращательном движении вокруг оси, равна сумме произведений масс материальных точек на квадраты их расстояний от оси
,
- где J – момент инерции, кг∙м 2 ,
- m — масса, кг
Справка: В английской системе мер момент инерции измеряется в унция-сила-дюйм (oz∙in∙s 2 )
1 oz∙in∙s 2 = 0,007062 kg∙m 2 (кг∙м 2 )
Момент инерции связан с моментом силы следующим соотношением

,

- где – угловое ускорение, с -2 [2]

,
Справка: Определение момента инерции вращающейся части электродвигателя описано в ГОСТ 11828-86
Номинальное напряжение
Номинальное напряжение (англ. rated voltage) — напряжение на которое спроектирована сеть или оборудование и к которому относят их рабочие характеристики [3].
Электрическая постоянная времени
Электрическая постоянная времени — это время, отсчитываемое с момента подачи постоянного напряжения на электродвигатель, за которое ток достигает уровня в 63,21% (1-1/e) от своего конечного значения.

,

- где – постоянная времени, с
Механическая характеристика
Механическая характеристика двигателя представляет собой графически выраженную зависимость частоты вращения вала от электромагнитного момента при неизменном напряжении питания.
Сравнение характеристик внешне коммутируемых электрических двигателей
Ниже представлены сравнительные характеристики внешне коммутируемых электродвигателей, в ракурсе применения в качестве тяговых электродвигателей в транспортных средствах.
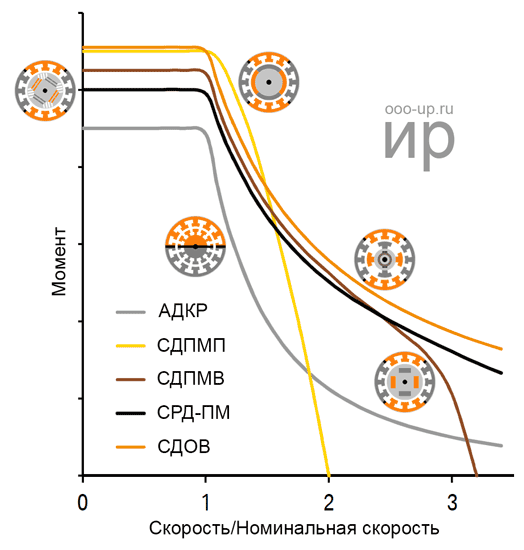
Сравнение механических характеристик электродвигателей разных типов при ограниченном токе статора
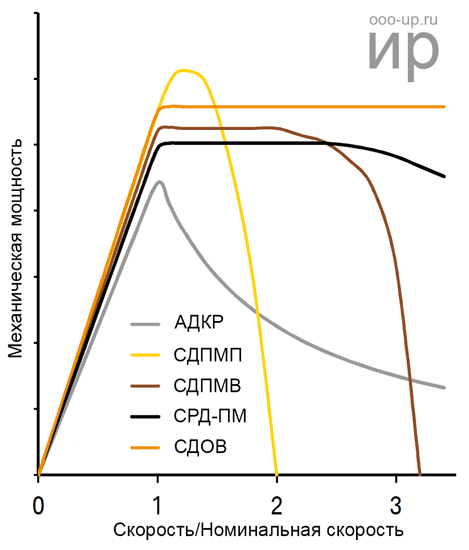
Зависимость мощности от скорости вращения вала для двигателей разных типов при ограниченном токе статора