Что такое угловая характеристика сд

Механическая и угловая характеристики синхронных электродвигателей
Синхронные двигатели начинают широко внедрять в строительное производство, применяя их для привода машин средней и большой мощности, не требующих регулирования скорости: компрессоров, насосов, камнедробилок, экскаваторов.
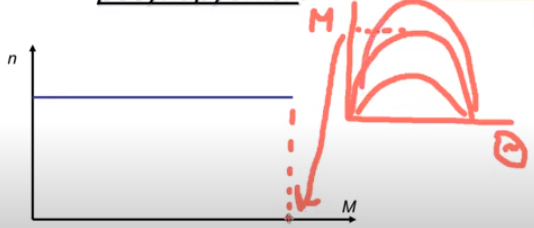
Синхронный двигатель имеет неизменную скорость вращения, поэтому его механическая характеристика представляет прямую линию, параллельную оси абсцисс. В квадранте координатной системы она характеризует двигательный, а в квадранте — генераторный режим (рис. 35,а).
Рекламные предложения на основе ваших интересов:
Дополнительные материалы по теме:
- Оказание первой помощи пострадавшим от поражения электрическим током
- Требования техники безопасности, выполнение которых обязательно при эксплуатации электроустановок
- Общие меры безопасности при эксплуатации электрических установок
- Классификация помещений по степени опасности поражения электрическим током
- Действие электрического тока на организм человека
- Техника безопасности при эксплуатации электрооборудования
- Особенности электроснабжения установок с электрифицированным инструментом
- Преобразователи частоты и понижающие трансформаторы
- Электропривод компрессоров
Рис. 35. Механическая и угловая характеристики синхронного двигателя
а — механическая характеристика; б — угловая характеристика
Синхронный двигатель обладает абсолютно жесткой механической характеристикой. Однако его момент не может иметь беспредельно большого значения. При некотором предельном или максимальном значении нагрузочного момента синхронный двигатель выходит из устойчивой синхронной работы и останавливается.
При увеличении нагрузки синхронного двигателя ротор его начинает отставать от поля статора, угол внутреннего сдвига фаз © при этом возрастает. Увеличению угла © соответствует рост момента синхронного двигателя. Однако при возрастании до значений, больших момент начинает уменьшаться и становится возможным выпадение из синхронизма и остановка двигателя.
Синхронный двигатель может работать и генератором с отдачей энергии в сеть при синхронной скорости, когда нагрузочный момент на его валу будет иметь отрицательное значение. Такой режим используется в сетевых двигателях преобразовательной группы системы Г—Д. Для целей торможения такой режим практического значения не имеет, поскольку при этом нельзя получить снижения скорости.
Торможение синхронных двигателей противовключе-нием практически не применяется из-за больших толчков тока и усложненной аппаратуры управления. Вместо этого обычно применяют динамическое торможение.
При динамическом торможении синхронного двигателя к кольцам ротора подводится постоянный ток, а обмотка статора замыкается на сопротивление. Механические характеристики синхронного двигателя в этом режиме будут подобны характеристикам асинхронного двигателя при динамическом торможении.
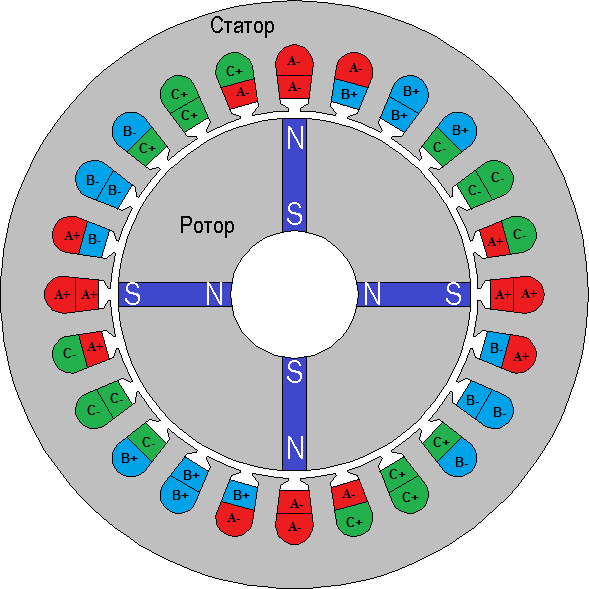
Современные синхронные двигатели имеют в роторе кроме нормальной рабочей обмотки, питаемой постоянным током, еще и специальную пусковую короткозам-кнутую обмотку. С помощью этой обмотки двигатель пускается в ход как асинхронный, поэтому в пусковых режимах он обладает асинхронной характеристикой.
Хотя синхронный двигатель является несколько более сложной машиной, чем асинхронный двигатель с ко-роткозамкнутым ротором (из-за наличия у первого возбудителя, колец и щеточного устройства), тем не менее он применяется очень широко, заменяя асинхронный электродвигатель. Объясняется- это главным образом тем, что синхронный двигатель может работать с опережающим cos ф, отдавая в сеть реактивную мощность, необходимую для возбуждения асинхронных машин и трансформаторов. Тем самым повышается cos ф всего предприятия в целом и уменьшается мощность компенсирующих устройств. При значительной мощности синхронных двигателей в данной электроустановке от компенсирующих устройств можно полностью отказаться. Коэффициент полезного действия синхронных двигателей и надежность их выше, чем асинхронных, вследствие увеличенного зазора между статором и ротором и меньшей чувствительности к изменениям напряжения сети. Последнее обстоятельство вызывается тем, что момент асинхронного двигателя пропорционален квадрату напряжения сети, а момент синхронного — первой степени напряжения.
Для уменьшения величины пусковых токов и связанного с ними снижения напряжения, особенно в сетях небольшой мощности, пуск синхронных двигателей осуществляется обычно через реактор, а в некоторых случаях— через автотрансформатор. Ограничение пусковых токов защищает обмотки двигателей от повышенных динамических нагрузок, возникающих при прямом включении в сеть.
Угловая характеристика синхронного двигателя
Угловая характеристика синхронного двигателя — зависимость электромагнитного момента (электромагнитной мощности) от угла нагрузки. При увеличении нагрузки синхронного двигателя ротор его начинает отставать от поля статора, угол внутреннего сдвига фаз Θ при этом возрастает.
Увеличению угла Θ соответствует рост момента синхронного двигателя. Однако при возрастании до критических значений, момент начинает уменьшаться и становится возможным выпадение из синхронизма и остановка двигателя.
Тип задачи
Нелинейная Плоско-параллельная задача магнитостатики.
Геометрия
Длина мотора (по оси z) 65 мм.
Дано
Плотность тока в обмотке j = 3 А/мм²
Коэрцитивная сила магнитов H = 730 кА/м
Задание
Построить угловую характеристику двигателя.
Решение
Предполагается, что ротор вращается синхронно с полем статора. То есть относительно ротора поле не меняется со времени. Можно выбрать произвольный момент времени, указать мгновенные значения токов обмотки j *cos(фазовый угол), установить ротор в правильное положение и решить задачу магнитостатики.
Чтобы снять угловую характеристику, надо решить серию задач с разным положением ротора относительно статора. Удобно поворачивать именно статор, чтобы не требовалось корректировать направление коэрцитивной силы постоянных магнитов.
Для автоматизации используется утилита LabelMover, которая автоматически изменяет модель (вращает статор с шагом 1°) и измеряет электромагнитный момент на каждом шаге.
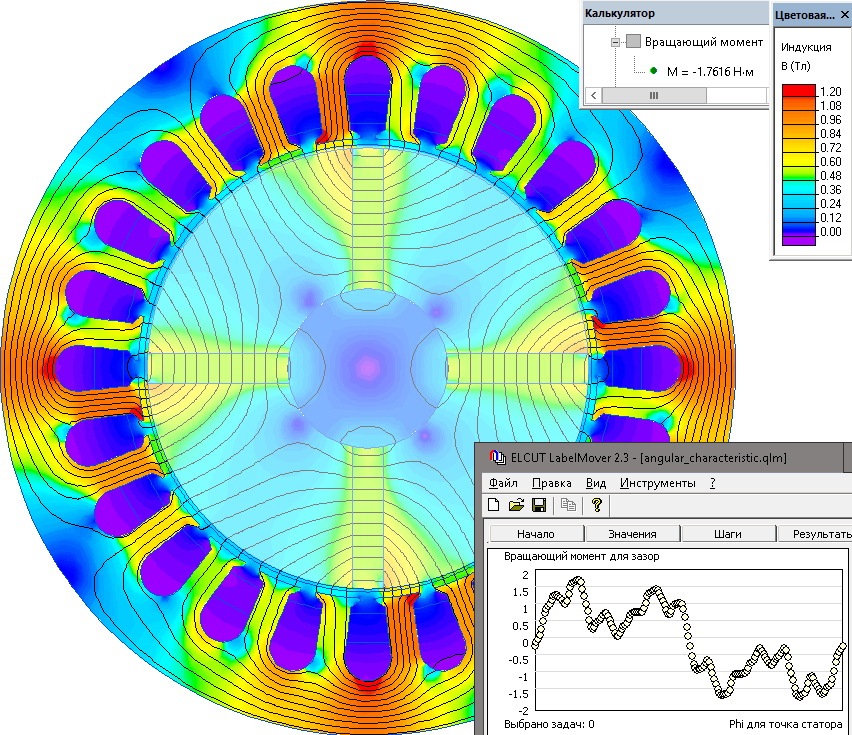
Результат
Распределение магнитного поля и электромагнитный момент для угла нагрузки 30°
- Скачать файлы задачи
Электрические машины — Угловая характеристика синхронной машины
Угловой характеристикой синхронной машины называют зависимость при постоянных токе возбуждения, напряжении и частоте сети (,, ). Знание этой характеристики позволяет установить ряд важных свойств синхронной машины, определяющих устойчивость ее работы параллельно с сетью.
Найдем эту зависимость для синхронной машины с явнополюсным ротором, полагая, что сопротивление якоря равно нулю () и машина не насыщена.
Активная мощность синхронной машины определяется выражением
.
Для преобразования этого выражения в искомую зависимость воспользуемся векторной диаграммой синхронной машины, включенной в мощную сеть с напряжением и и работающей в режиме генератора с выдачей реактивной мощности в сеть (рис. 5.37).
Согласно векторной диаграмме
.
С учетом этого соотношения выражение для активной мощности преобразуется к виду
.
Учитывая, что
, ,
выразим активную мощность через продольную и поперечную составляющие тока якоря:
.
Из векторной диаграммы находим выражения для продольной и поперечной составляющих тока якоря:
; .
Подставляя эти выражения в формулу для активной мощности, получим
.
Если синхронная машина имеет неявнополюсный ротор (), то второе слагаемое обращается в нуль и
.
Согласно этому выражению угловая характеристика неявнополюсной машины является синусоидальной функцией угла q (рис. 5.38). При мощность , машина работает в генераторном режиме. При мощность , машина работает в режиме двигателя. При синхронная машина развивает максимальную по модулю мощность
.
Величина максимальной мощности прямо пропорциональна току возбуждения (определяющему ЭДС ) и обратно пропорциональна полному индуктивному сопротивлению якоря по продольной оси . При проектировании синхронной машины сопротивление выбирают так, чтобы при номинальном токе возбуждения кратность максимального момента была не менее 1,7,
Выражение для угловой характеристики явнополюсной синхронной машины содержит составляющую, зависящую от (рис. 5.39). Эта составляющая обусловлена магнитной несимметрией ротора и появлением в связи с этим в явнополюсной машине чисто магнитного вращающего момента из-за стремления ротора ориентироваться по оси магнитного поля (подобно магнитной стрелке компаса). Этот эффект существует даже при отсутствии возбуждения ().
Синхронные машины, работающие без возбуждения, называются реактивными. Они имеют небольшую мощность (несколько киловатт). С целью повышения мощности в них стремятся конструктивными мерами увеличить разницу между сопротивлениями и , так чтобы отношение . В синхронных машинах нормального исполнения отношение . Поэтому амплитуда второй гармоники мощности не превышает 25% от амплитуды первой гармонической составляющей.
Угловая и механическая характеристики сд.
СД работает в сети с выполнением условий согласования. После включения СД в сеть его частота меняться не может. Так как должны выполняться условия согласования, поле статора и ротор должны вращаться синхронно.
Механическая характеристика есть .
Максимальный момент определяется границей устойчивости двигателя в синхронизме.
Угловая характеристика
Меняя ток возбуждения, получаем максимальные моменты, как меньше, так и больше.
Предел саморегулирования – граница устойчивости СД в синхронизме.
Момент нагрузки не должен превышать максимального момента СД.
Регулирование коэффициента мощности сд, V-образные характеристики.

При изменении момента нагрузки происходит изменение активной мощности, которую СД вырабатывает. Активная мощность любого СД никак не регулируется, она зависит только от нагрузки:
В силу свойства саморегулирования двигатели создают момент вращения, равный моменту сопротивления:
СД отличается от прочих двигателей тем, что у ТАД или у ДПТ изменение момента всегда сопутствует изменению частоты, а у СД частота не меняется, меняется угол рассогласования. Чем больше угол рассогласования, тем больший момент передается от двигателя. Чем выше момент сопротивления, тем больший угол рассогласования, так как ротор начинает тормозиться относительно поля статора, а чем выше угол рассогласования, тем по угловой характеристике выше момент. Двигатель будет переходить в новое устойчивое состояние с большим углом рассогласования. Предел увеличения момента – достижение .
При больших моментах сопротивления СД может выпасть из синхронизма. Чтобы этого не происходило, повышают ток возбуждения ротора.
Реактивная потребляемая СД из сети мощность регулируется током возбуждения ротора (как в СГ).
Пусть ток чисто активный, реактивная мощность не потребляется.

Уменьшим ток возбуждения ( ). ЭДС по величине уменьшается. Строим ЭДС, затем вектор , затем ток . запаздывает относительно . Двигатель потребляет индуктивную мощность. Аналогично строится (опережает ). Двигатель потребляет емкостную мощность.
Так как момент нагрузки не меняется – , и :
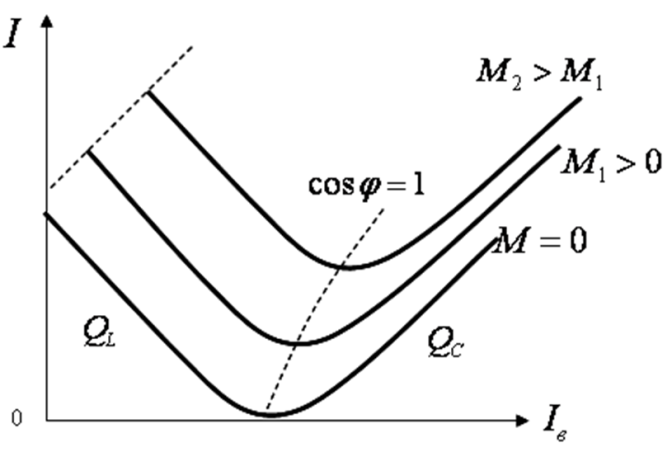
V-образные характеристики
При малом токе возбуждения потребляемая мощность носит индуктивный характер, при большом – емкостной.
Существует граница регулирования реактивной мощности. Мы не можем делать очень маленький ток возбуждения, так как момент вращения двигателя становится меньше момента нагрузки. Двигатель выходит из синхронизма (частотная авария).
Обычно СД работает с перевозбуждением, чтобы улучшить коэффициент мощности энергосистемы (синхронный компенсатор).
Синхронный компенсатор.
Синхронный компенсатор – СД, работающий без нагрузки на валу. Он потребляет из сети только реактивную емкостную мощность. Это нужно для того, чтобы компенсировать реактивную мощность двигателей, которые включены в энергосистему.
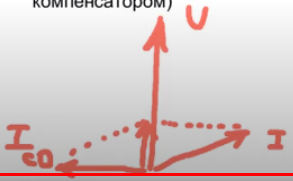
Допустим, есть ТАД, который потребляет из энергосистемы очень большой реактивный ток. Чтобы не гонять в энергосистеме по проводам большие реактивные токи, параллельно ТАД подключают СД, который работает без момента на валу, то есть не производит активной работы. При большом токе возбуждения он потребляет из энергосистемы реактивный ток . Складывая потребляемые токи СД и ТАД, видим, что ток, потребляемый от энергосистемы заметно меньше по величине, чем ток, который потреблялся бы просто ТАД. За счет этого увеличивается КПД энергосистемы, поскольку по проводам не бегает большой ток, и потери, пропорциональные квадрату тока, в линии электропередач не возникают.