Шаговый двигатель в часах как работает
Глядя на циферблат современных кварцевых часов с невероятным количеством стрелок, сложно поверить, что долгое время камнем преткновения в их производстве было изготовление шагового двигателя, способного поместиться в корпус разумных размеров.
Возвращаясь к истории развития кварцевых калибров, стоит вспомнить, что своеобразным мостиком от чистой механики к кварцу стали электро-механические часы самых разных конструкций. Мы с умилением рассматриваем хитроумные резонаторы, в т.ч. с использованием кварца, замысловатые системы передачи колебаний на колесную систему, и не задумываемся, что причиной всего этого разнообразия технических решений было отсутствие у часовщиков миниатюрного электродвигателя, способного поместиться в корпусе наручных часов. Традиционные моторы, использовавшиеся в 1950-1960-х годах, категорически не подходили для этой задачи. Перелом произошел, когда в часы удалось поместить шаговый электродвигатель.
Первую победу шаговый двигатель одержал в 1957 году, когда на Всемирной выставке в Брюсселе экспонировался первый в мире советский фрезерный станок с цифровым программным управлением. Этот экспонат был удостоен Большой золотой медали и открыл новую страницу в станкостроении. Современная техника немыслима без фрезерных, токарных, электроэрозионных и многих других станков с цифровым управлением. Большая часть из них действует благодаря шаговым двигателям.

Затем шаговые двигатели обосновались в механизмах управления прокатных станов, прессов и других металлургических машин, стали одним из самых распространенных элементов автоматики. Они работают на кораблях, самолетах и искусственных спутниках Земли — везде, где требуется быстрое, точное и надежное исполнение воли человека.
В обычном электродвигателе магнитное поле страгивает с места ротор, который дальше продолжает вращение по инерции. Точно предсказать, на сколько оборотов или на какую часть оборота повернется ротор, невозможно. Это приемлемо в электровозе, который останавливают с помощью тормозов, но не в часах, стрелки которых должны совершать точно отмеренные движения. Шаговые моторы получили свое название из-за того, что в них ротор каждый раз поворачивается на строго определенный угол, или шаг. Более того: ротор в них не имеет инерции и, даже будучи отключенным от питания, мотор надежно фиксирует вал в том положении, в котором его обесточили. Чтобы добиться таких характеристик, конструкцию классического электродвигателя пришлось кардинально пересмотреть.

На принципиальном уровне шаговые электродвигатели состоят из статора, на котором расположены обмотки возбуждения, и ротора, имеющего намагниченные половины – одну отрицательную и одну положительную. Шаговые двигатели с магнитным ротором позволяют получать больший крутящий момент и обеспечивают фиксацию ротора при обесточенных обмотках.
Ротор гибридного двигателя имеет зубцы, расположенные в осевом направлении. Он разделен на две части, между которыми расположен цилиндрический постоянный магнит. Таким образом, зубцы верхней половинки ротора являются северными полюсами, а зубцы нижней половинки — южными. Кроме того, верхняя и нижняя половинки ротора повернуты друг относительно друга на половину угла шага зубцов. Число пар полюсов ротора равно количеству зубцов на одной из его половинок.
Статор двигателя также имеет зубцы, обеспечивая большое количество положительных и отрицательных полюсов, в отличие от основных полюсов, на которых расположены обмотки: чем больше зубцов, тем меньший шаг может сделать двигатель, а значит, выше будет его точность. К примеру, если у двигателя (как на рисунке 1), 4 основных катушки и 4 зубца на роторе, то за один шаг он сможет повернуться на 90 градусов. При наличии большего числа зубцов (рисунок 2) как на статоре, так и на роторе, длина шага уменьшится, а вместе с ней уменьшится и угол поворота. Зубцы ротора обеспечивают меньшее сопротивление магнитной цепи в определенных положениях ротора, что улучшает статический и динамический момент. Это обеспечивается соответствующим расположением, когда часть зубцов ротора находится строго напротив зубцов статора, а часть между ними.
Главное преимущество шаговых приводов — точность. При подаче тока на обмотки шаговый двигатель повернется строго на определенный угол. Чем меньше угол — тем выше точность.

Увы, описанный выше мотор не мог поместиться в часовой корпус. Но после долгих поисков японские инженеры из компании Seiko смогли произвести на свет миниатюрный шаговый двигатель (рис. 3), у которого была всего одна катушка индуктивности, а ротор и статор имели по два полярных «зубца». Проблем при производстве такого мотора было сразу несколько. Намотать несколько тысяч витков тончайшей проволоки на катушку, обеспечить невысокое энергопотребление данного изделия, получить достаточную мощность для вращения колесной системы – все эти задачи нужно было решить в одном изделии. Японцы с ними справились, и предложенная ими компоновка двигателя применяется и по сей день.

Шаг в секунду и быстрее
Решение японских инженеров произвело революцию в часовой отрасли и решило ключевую, но отнюдь не единственную задачу. Подобный мотор хорош для классического трехстрелочника, но плохо подходит для привода хронографа или дополнительного счетчика. Решение этой проблемы нашли уже швейцарские мастера, которые лишь спустя несколько лет после появления Astron смогли прийти в чувства и вновь начать удивлять публику, в том числе и на кварцевом поприще. Среди производителей механизмов особняком от всех стоит швейцарская компания Soprod, начавшая производство кварцевых калибров в 90-х. «Опытное» подразделение исконно механической фабрики стало производить демократичные калибры, но вскоре, оценив перспективы рынка, перенесло фокус внимания на кварцевые механизмы высокого класса. Основным достижением компании Soprod можно считать уникальную методику программирования и начало применения микромоторов с возможностью вращения стрелок в обе стороны благодаря использованию сразу двух маленьких, но мощных катушек индуктивности. Да и шаг стрелки теперь зависел не от колесной передачи, а от того, сколько микроскопических магнитных зубцов удавалось разместить не роторе, непосредственно на котором и была закреплена стрелка каждого счетчика.


Теперь стало можно свободно располагать в любой части циферблата без привязки к колесной системе любое количество стрелок и наделять их совершенно фантастичеким функционалом. Хотите ретроградный указатель дня недели, часа или даже ретроградные минутные или секундные счетчики? Никаких проблем, ведь запрограммировать схему отправлять импульс на микромотор можно в любом порядке и направлении. По одному импульсу в день и возврат в исходное положение на 8-й день – вот вам ретроградный календарь. Ранее такие функции были атрибутами высококлассной механики, теперь они реализованы в самых разных часах и доступны широкому кругу покупателей. Яркий пример подобных часов – флагманские модели бренда Adriatica или Vostok Europa.
Некоторые бренды идут дальше и предлагают совсем необычные решения. Одним из наиболее интересных подходов дизайнеров к платформе калибров свободной компоновки Soprod SOP FM13D является модель Victorinox Swiss Army Chrono Classic 1/100. В ней на два мотора прикреплены счетчики сотых долей секунд, первый диск показывает цифры первого порядка, другой – второго. При запуске хронографа стрелка отсчета секунд начинает движение, отсчитывая целые секунды, и диски начинали вращаться, отмеряя сотые доли. Удивительный симбиоз технической возможности и дизайнерской идеи произвел на свет одну из самых оригинальных моделей хронографов с возможностью отсчета одной сотой.
Точность и мощность
Именно этими двумя словами можно охарактеризовать калибры последнего поколения от лидера индустрии – компании ETA. Если об аспекте точности (PreciDrive) мы говорили в прошлой статье, посвященной вопросам термокомпенсации, то сегодня коснемся вопроса мощности часового мотора. Технология PowerDrive была разработана компанией ETA специально для высокоточных кварцевых хронографов. Шаговые моторы нового поколения способны делать 200 шагов в секунду, что кроме перспектив для маркетологов и дизайнеров открывает совершенно новые просторы в хронометрии. Безусловно, просто мотора для такой работы мало, необходимо изготовить микросхему, которая будет управлять одновременно сразу несколькими моторами, каждый из которых в определенном режиме будет иметь разный функционал. Кроме того, актуальным остается вопрос энергопотребления. В ETA не раскрывают секрета, но говорят, что при ускоренном перемещении стрелок (во время работы хронографа, или при переводе показаний в ускоренном режиме), потребление энергии даже ниже, чем в стандартном режиме. Увы, более подробную информацию о калибрах с данной технологией найти практически невозможно. Производитель хранит все детали в секрете, ведь сейчас это одно из главных конкурентных преимуществ кварцевой линейки некоторых брендов Swatch Group, таких как Certina, Hamolton, Longines.
В любую сторону света
Другим, стоящим отдельно от всех брендом Swatch Group является Tissot с технологией T-Touch. Тактильное стекло в рамках данной статьи мы рассматривать не станем, зато поговорим о том, как с помощью всего двух стрелок часы могут предоставлять информацию о перспективах изменений погоды (как заправский барометр) и даже указывать направление на север и юг (как самый настоящий компас). Процесс перехода из обычного режима отображения времени и превращение часовой и минутной стрелок в стрелки компаса выглядит как некое таинство. Если вращать часы, держа их горизонтально, то ни секунды не оставаясь на месте, стрелки все время будут упорно показывать вам верное направление к полюсам. А как только новоиспеченный турист наиграется с этим прекрасным усложнением, они вновь займут свои места и покажут текущее время. Как же это происходит?

Для этого нам придется заглянуть внутрь одних из первых часов в линейке T-Touch. Уже наметанным взглядом мы увидим по две катушки индуктивности для каждой из стрелок, расположенные не как у Soprod V-образно, а на оборот — параллельно друг другу. Дальше нам остается лишь понять, что под металлической платиной скрываются уже знакомые шаговые моторы с очень маленьким шагом, способные перемещать стрелки на очень маленький угол. Однако стоит отдать марке Tissot должное: даже в кулуарных разговорах с производителями современных калибров все признают, что скорость и точность движения стрелок в T-Touch для многих является недостижимой. Все остальные тонкости реализованы благодаря очень хитрой схеме управления с электронным компасом, барометром, альтиметром и прочими «наворотами», которая передает импульсы на моторы, чтобы те послушно исполнили команды.

Для самых маленьких
По иронии судьбы, самые компактные в мире моторы используются в одних из самых крупных и массивных часах на рынке. Речь идет о флагманских моделях Casio в линейке G-Shock. Несколько лет назад компания уже анонсировала самый маленький в мире шаговый мотор, да еще и приводимый в действие солнечной энергией. Но японцам было нужно больше места в и без того не маленьком корпусе. Для чего? Чтобы поместить в часы GPS-антенну, Bluetooth-передатчик и еще пару датчиков (удара и положения стрелок). Перебирая, на чем бы сэкономить место, остановились на моторах. Проволоку взяли потоньше, намотали ее поплотнее – уже минус в объеме и плюс в мощности. Всех секретов японцы опять же не раскрывают, но поместить сразу 5 моторов вместе со всем перечисленным выше списком деталей им удалось. Да и моторы обрели новый статус – «на 26% меньше чем самый маленький мотор в мире» — инженеры Casio улучшили свой собственный рекорд. А покупатели получили новые часы с широчайшим функционалом, потрясающей надежностью и хронографом 1/100 секунды.

Кварцевый люкс
Возможно, для кого-то это выражение звучит немного иронично, но только не для компании Seiko. В верхней линейке марки Grand Seiko кроме высококлассных автоматических или гибридных калибров вроде Spring Drive, имеются и чисто кварцевые модели, которые по качеству материалов и обработке платин не уступают люксовым швейцарским механическим изделиям.

Одной из проблем, характерной для кварцевых часов, является недостаточный момент, развиваемый шаговым двигателем, из-за чего дизайнеры вынуждены использовать облегченные стрелки. В линейке калибров 9F в Grand Seiko пластиковым деталям места нет, и чтобы обеспечить мотору мощность, достаточную для работы с металлической колесной системой, создатели калибра применили в нем двухимпульсную систему регулирования, отправляющую каждую секунду на мотор не один электрический импульс, а целых два. Развивать больший момент двигателю помогает и увеличение индуктивности катушки: разработанная Seiko технология позволила использовать при ее намотке более тонкую проволоку (толщиной 15 мк вместо обычных 30 мк) и добиться более плотной укладки. Как следствие, число витков и напряженность генерируемого катушкой магнитного поля увеличились в четыре с лишним раза. Позже эта технология очень пригодилась Seiko при создании Spring Drive. Теперь кварцевым механизмам линейки по плечу любые стрелки — даже те, с которыми ранее могли справиться только механические часы.
Автор: Дмитрий Лисов
При перепечатке активная ссылка обязательна
105 [Catalogue_ID] => 1 [Parent_Sub_ID] => 0 [Subdivision_Name] => Статьи [Template_ID] => 23 [ExternalURL] => [EnglishName] => articles [LastUpdated] => 2024-03-12 13:04:02 [Created] => 2016-09-26 11:34:35 [LastModified] => 2024-03-12 13:04:02 [LastModifiedType] => 1 [Hidden_URL] => /articles/ [Read_Access_ID] => 1 [Write_Access_ID] => 3 [Priority] => 3 [Checked] => 1 [Edit_Access_ID] => 3 [Checked_Access_ID] => 3 [Delete_Access_ID] => 3 [Subscribe_Access_ID] => 0 [Moderation_ID] => 1 [Favorite] => 0 [TemplateSettings] => [UseMultiSubClass] => 1 [UseEditDesignTemplate] => 0 [DisallowIndexing] => 0 [Description] => [Keywords] => [Title] => [ncH1] => [ncImage] => [ncIcon] => [ncSMO_Title] => [ncSMO_Description] => [ncSMO_Image] => [Language] => ru [DisplayType] => inherit [LabelColor] => purple [Cache_Access_ID] => 0 [Cache_Lifetime] => 0 [Comment_Rule_ID] => 0 [SitemapPriority] => 0.5 [SitemapChangefreq] => daily [IncludeInSitemap] => 1 [img] => [Pic] => [AlterTitle] => [MainMenu] => 1 [SubMenu] => 0 [SectionText] => [MainArea_Mixin_Settings] => [ncDisallowMoveAndDelete] => 0 [_nc_final] => 1 [img_name] => [img_url] => [img_preview_url] => [img_size] => [img_type] => [img_download] => [img_fs_type] => [Pic_name] => [Pic_url] => [Pic_preview_url] => [Pic_size] => [Pic_type] => [Pic_download] => [Pic_fs_type] => [ncIcon_name] => [ncIcon_url] => [ncIcon_preview_url] => [ncIcon_size] => [ncIcon_type] => [ncIcon_download] => [ncIcon_fs_type] => [ncImage_name] => [ncImage_url] => [ncImage_preview_url] => [ncImage_size] => [ncImage_type] => [ncImage_download] => [ncImage_fs_type] => [ncSMO_Image_name] => [ncSMO_Image_url] => [ncSMO_Image_preview_url] => [ncSMO_Image_size] => [ncSMO_Image_type] => [ncSMO_Image_download] => [ncSMO_Image_fs_type] => [_db_inherit_Template_ID] => 22 [_db_inherit_Read_Access_ID] => 1 [_db_inherit_Write_Access_ID] => 3 [_db_inherit_Edit_Access_ID] => 3 [_db_inherit_Checked_Access_ID] => 3 [_db_inherit_Delete_Access_ID] => 3 [_db_inherit_Moderation_ID] => 1 [_db_inherit_LastModifiedType] => 1 [_db_inherit_SitemapPriority] => 0.5 [_db_inherit_Language] => ru [_db_inherit_IncludeInSitemap] => 1 [_db_inherit_SitemapChangefreq] => daily [_db_inherit_DisallowIndexing] => 0 ) —>
Шаговый двигатель
Шаговый двигатель представляет собой устройство, преобразующее электрическую энергию в механическую. По конструкции это бесколлекторный синхронный мотор с ротором, совершающим дискретные перемещения с фиксацией положения после каждого смещения. Величина шага строго определена, что позволяет вычислять абсолютную позицию ротора, подсчитав количество шагов.
Принципы действия биполярных и униполярных шаговых двигателей
Биполярный
Основные элементы шагового двигателя – ротор и статор. Первый представляет собой постоянный двухполюсный магнит. Он располагается на валу устройства. Статор – это замкнутый магнитопровод в виде кольца, он состоит из двух обмоток, половинки которых находятся на противоположных полюсах. На обмотке АВ – вертикально размещенные, на СD – горизонтально расположенные.
- При подаче напряжения на АВ появляется магнитное поле статора. Сверху полюс N, внизу S. Так как разноименные полюса притягиваются, ротор двигателя займет положение, при котором ось его магнитного поля совпадет с осью работающих АВ. Такое расположение ротора двигателя является очень устойчивым, если попытаться его сдвинуть, возникнет сила, которая будет его возвращать назад.
- Напряжение с обмотки АВ снимается и подается на обмотку CD, в результате чего возникает магнитное поле, в котором полюса расположены горизонтально – справа N, а слева S. Соответственно, постоянный магнит ротора расположится по горизонтальной оси, проделав минимальный путь – повернувшись на четверть оборота. Это будет шагом двигателя.
- Каждая последующая коммутация (со сменой полярности при подключении обмотки) заставит ротор поворачиваться на одну четвертую окружности. На полный оборот потребуется четыре шага. Частота вращения пропорциональна частоте переключения фазных обмоток. Если подключать фазы, меняя полярность в противоположной последовательности, ротор шагового двигателя будет вращаться в обратную сторону.
Униполярный
Выше был описан принцип работы биполярного шагового двигателя – у него для каждой фазы предусмотрено две обмотки. Чтобы менять магнитное поле, необходимо каждую обмотку:
- отключить от источника электротока,
- подключить в прямой полярности,
- подключить в обратной полярности.
Осуществить коммутацию позволяет мостовой драйвер, который представляет собой сложную микросхему. Такой вариант подходит, если ток коммутации не превышает 2 А. Решить вопрос с управлением биполярным двигателем значительно сложнее при потребности в больших коммутационных токах. Значительно проще менять магнитное поле в статоре шагового двигателя, если использовать устройство с униполярными обмотками. В этом случае один вывод у всех четырех обмоток подсоединен к плюсовому выводу, а А, В, С и D последовательно подсоединяются к минусовому сигналу. В результате при каждой коммутации создается магнитное поле, заставляющее ротор двигателя повернуться. Коммутация по такому принципу обеспечивается четырьмя ключами, которые замыкают обмотки на землю. Управление ключами обычно осуществляется с выводов микроконтроллера.
При выборе шагового двигателя следует учитывать, что биполярный, при тех же габаритах, что и униполярный, обеспечивает больший крутящий момент. Выигрыш достигает 40 %. Это связано с тем, что в шаговом униполярном двигателе задействуется одна обмотка, а в биполярном две. Преимуществом устройства с одной обмоткой является простое управление.
Виды шаговых двигателей
Существует несколько разновидностей. К наиболее востребованным относятся модели с переменным магнитным сопротивлением, с постоянным магнитом и гибридные.
Устройства с переменным магнитным сопротивлением
Такие шаговые двигатели не имеют постоянных магнитов в роторе. Для изготовления ротора зубчатой формы используется магнитомягкий материал. Его вращение обеспечивается за счет замыкания магнитного поля статора через зубцы, располагающиеся вблизи полюсов. Зубцы к полюсам притягиваются и ротор поворачивается. Шаговые двигатели с переменным магнитным сопротивлением имеют небольшой крутящий момент в сравнении с моделями других типов при тех же габаритах. Это ограничивает сферу их применения.
Устройства с постоянными магнитами
На примере такого устройства выше разъяснялся принцип работы шаговых двигателей. В реальности роторы таких двигателей имеют несколько постоянных магнитов. От их количества зависит число шагов, за которое ротор выполняет полный оборот. Максимальное значение – 48, угол шага при этом составляет 7,5 градусов.
Гибридные устройства
В конструкции шаговых гибридных двигателей присутствует и зубчатый ротор, и постоянные магниты. Функционирует устройство по тому же принципу, что и двигатель с постоянными магнитами, но гибридный вариант отличается большим числом полюсов. За счет такого количества полюсов у гибридных шаговых двигателей больший момент, выше скорость и меньше величина шага. Максимальное число на один оборот может доходить до 400, при этом угол шага составляет 0,9 градусов. Гибридные устройства сложнее в изготовлении и дороже шаговых устройств других типов, но благодаря высокой функциональности пользуются спросом.
Особенности управления
Для управления двигателем с дискретным движением ротора используются следующие режимы: полношаговый, полушаговый и микрошаговый.
Полношаговый режим
При таком способе двигателем производится попеременная коммутация фаз. При этом к источнику напряжения фазы подключаются попеременно без перекрытия. Точки равновесия ротора при таком управлении совпадают с полюсами статора. К недостаткам полношагового режима относят то, что в каждый момент времени у биполярного двигателя используется половина обмоток, а у униполярного лишь четверть. Если подключить две фазы на полный шаг, то ротор будет зафиксирован между полюсами статора благодаря подаче питания на все обмотки. При этом увеличивается крутящий момент шагового двигателя, а положение ротора в состоянии равновесия смещается на полшага. Угол шага при этом остается неизменным.
Полушаговый режим
Если каждый второй шаг включать одну фазу, а между этим включать сразу две, можно увеличить количество перемещений на один оборот в два раза. Такая коммутация, соответственно, в два раза уменьшает угол шага. При этом достичь полного момента в полушаговом режиме невозможно. Режим активно используется, так как позволяет простым способом вдвое увеличить число шагов двигателя. Важно учитывать, что при снятии напряжения со всех фаз в полношаговом и полушаговом режиме ротор остается в свободном состоянии и может произойти его смещение при механических воздействиях. Для фиксации ротора требуется в обмотках двигателя формировать ток удержания. Обычно его значение намного меньше номинального. Благодаря способности шагового двигателя фиксировать положение ротора при остановке отсутствует необходимость использовать тормозную систему, фиксаторы и иные приспособления.
Микрошаговый режим
Чтобы максимально увеличить число шагов двигателя, используется микрошаговый режим. Для этого требуется включить две фазы и распределить ток обмоток неравномерно. При смещении магнитного поля статора относительно полюсов смещается и сам ротор. У диспропорции токов между рабочими фазами двигателя обычно наблюдается дискретность, которая определяет величину микрошага. Количество микрошагов на один оборот ротора шагового двигателя может составлять более 1 000. Устройство, работающее в таком режиме, можно максимально точно позиционировать. Однако данный способ управления является достаточно сложным.
Основные достоинства
К достоинствам шаговых двигателей относят:
- точное позиционирование, которое не требует обратной связи. Угол поворота определяется числом электрических импульсов;
- полный крутящий момент, который двигатель обеспечивает при снижении скорости вращении и до полной остановки;
- фиксацию положения шагового двигателя при помощи тока удержания;
- высокую точность регулировки скорости вращения без необходимости использования обратной связи;
- быстрый старт и остановку двигателя, реверс;
- высокую надежность. Устройства долговечны благодаря отсутствию коллекторных щеток.
Основные недостатки
К недостаткам шаговых двигателей можно отнести:
- относительно невысокие скорости вращения;
- сложную систему управления;
- риск эффекта резонанса;
- риск потери позиционирования ротора шагового двигателя под воздействием механических перегрузок;
- низкую удельную мощность.
Характеристики
Двигатель шагового типа является сложным механическим и электротехническим устройством. Список основных характеристик, которые следует учитывать при выборе устройства, включает:
- сопротивление обмотки фазы. Показатель сопротивления обмотки при работе на постоянном токе;
- число полных шагов за один оборот ротора. Это основной параметр шагового двигателя, который определяет точность позиционирования, плавность движения, разрешающую способность;
- угол полного шага. Это величина угла, на который поворачивается ротор за одно перемещение. Для расчета можно разделить 360° на количество шагов;
- номинальный ток. Наибольшее значение тока, при котором двигатель может работать неограниченно долгое время;
- номинальное напряжение. Максимально допустимое постоянное напряжение на обмотке при статическом режиме шагового двигателя;
- сопротивление изоляции. Величина сопротивления между корпусом и обмотками;
- момент инерции ротора. Чем меньше инерционность ротора, тем он быстрее разгоняется;
- крутящий момент. Для шагового двигателя это ключевой механический параметр. Указывается максимальное значение для конкретной модели двигателя;
- пробивное напряжение. Показатель минимального напряжения, при котором возникает пробой изоляции между корпусом и обмотками;
- индуктивность фазы. Данный параметр принимают во внимание, если от двигателя требуется высокая скорость вращения. От него зависит скорость увеличения тока в обмотке. Если фазы следует переключать с высокой частотой, необходимо увеличивать напряжение для быстрого нарастания тока;
- удерживающий момент. Это показатель крутящего момента при остановленном шаговом двигателе и при двух фазах, запитанных номинальным током.
Сфера применения
Шаговые двигатели рассчитаны на использование в составе устройств с дискретным управлением, где необходимо точно позиционировать исполнительные механизмы. Также они применяются в промышленном оборудовании с программным управлением, где требуется обеспечить непрерывное движение по заданной траектории и импульсное влияние исполнительными механизмами. Ротор шагового двигателя способен поворачиваться на заданный угол и на определенное количество оборотов вокруг своей оси. Благодаря этому шаговые устройства позволяют позиционировать считывающие головки проигрывателей оптических дисков, дисковых накопителей, печатающих головок сканеров, принтеров и иных устройств. Такие двигатели широко используются не только на производстве и в составе бытовой техники. Эти устройства востребованы радиотехниками, робототехниками, мастерами-любителями, изготавливающими самодельные станки с ЧПУ, движущиеся устройства и т. д. Для управления применяются специально разработанные контроллеры либо сложные электронные схемы. Управлять импульсными сигналами, заставляющими двигатель работать в заданном режиме, также можно через порт компьютера.
шаговый двигатель, серводвигатель: преимущества и недостатки
Шаговые двигатели и серводвигатели используются для схожих применений, но один из них используется там, где нужна более точное позиционирование и скорость перемещения.
Существенная разница заключается в том, что шаговые двигатели работают без обратной связи. Т.е. Вы посылаете импульс STEP на драйвер и двигатель поворачивается на угол одного шага.
Чтобы понять как работает шаговый двигатель, можно взять кварцевые часы, в которых секундная стрелка на каждый сигнал STEP совершает 1 шаг (перемещается на 1 секунду) и совершает 1 оборот за 60 импульсов STEP или 60 секунд. Точность совершения этих секундных перемещений зависит только от электроники, которая формирует управляющие сигналы.
10 наиболее значимых преимуществ шагового двигателя:
1) Стабильность. Работает при различных нагрузках.
2) Не требует обратной связи. Двигатель имеет фиксированный угол поворота.
3) Относительно невысокая стоимость для организации систем контролированных перемещений
4) Стандартизированные размеры двигателя и угол поворота.
5) Простота в установке и использовании.
6) Надежность. Если что-либо поломается, двигатель остановится.
7) Долгий срок эксплуатации.
8) Превосходный крутящий момент на низких оборотах.
9) Превосходная повторяемость при позиционировании.
10) Шаговый двигатель не может сгореть при нагрузке, превышающей максимальный вращающий момент двигателя. (При такой нагрузке двигатель будет просто пропускать шаги).
10 наиболее важных преимуществ серводвигателей:
1) Высокая мощность по сравнению с размерами и весом двигателя.
2) С помощью энкодера определяется разрешение.
3) Высокая эффективность. Может достичь 90% при небольших нагрузках.
4) Высокий крутящий момент по отношению к инерции. Работает с быстрым ускорением.
5) Резервирует энергию для поддержания питания на короткий период.
6) Резервирует вращающий момент для поддержания вращения на короткий период.
7) Двигатель остается прохладным. Ток потребления пропорционален нагрузке.
8) Высокий крутящий момент на высокой скорости.
9) Тихая работа на высоких скоростях.
10) Отсутствие явлений резонанса и вибрации.
10 наиболее значимых недостатков шаговых двигателей:
1) Низкая эффективность. Мотор потребляет много энергии независимо от нагрузки.
2) Крутящий момент резко снижается при увеличении частоты вращения (крутящий момент обратно пропорционален скорости.)
3) Низкая точность. 1:200 при полном шаге.1:2000 при микрошаге.
4) Склонен к резонансу. Для устранения резонансных процессов требуется микрошаг.
5) Отсутствует обратная связь для контроля шагов.
6) Не может резко стартовать на высокой скорости (Требуется плавный разгон).
7) Высокий нагрев двигателя в процессе работы.
8) Шаговый мотор не может моментально продолжить работу после перегрузки на валу.
9) Шумный на средних и высоких скоростях.
10) Низкая мощность по сравнению с размером и весом.
10 наиболее значимых недостатков серво двигателей (кроме их относительно дорогой стоимости):
1) Для стабильной работы двигателя требуется настройка драйвера (ПИД-регулятор).
2) Мотор может сгореть. Для предотвращения этого требуются специальные защитные цепи в драйвере.
3) Необходимо наличие энкодера.
4) Низкий срок эксплуатации щеток двигателя (требуется регулярное обслуживание и замена).
5) Пиковые нагрузки сокращают рабочий цикл.
6) При длительной работе с перегрузками двигатель может сгореть.
7) Сложность выбора двигателей, энкодеров и серводрайверов.
8) Многократное увеличение потребляемой энергии при пиковых нагрузках.
9) Двигатель развивает пиковую мощность на высокой скорости.
10) Плохое охлаждение двигателя. Требуется внешний вентилятор.
Шаговые двигатели | Продукция | Поддержка | FAQ | Новости | Купить | Робототехника | Карта сайта | RSS

тел. +7(495)726-01-47 Aleksdrive
e-mail: aleksdrive@list.ru ICQ 565033142
Как работает шаговый двигатель?

Шаговый двигатель — это бесщеточный двигатель постоянного тока, который преобразует электрические импульсы в механическое движение. Каждый импульс — это поворот Ротора (подвижной части двигателя) на небольшой угол (шаг). Например, если шаговый двигатель имеет 200 шагов на оборот, то после подачи 50 импульсов он сделает четверть оборота. Частота и последовательность влияют на направление вращения и его скорость.
Вступление
Шаговые двигатели часто используются в устройствах, требующих высокой точности. Вы можете найти их в фрезерных станках с ЧПУ, 3D принтерах, роботах на заводах, сканерах или приводах CD/DVD. Шаговики — действительно хорошие и удобные устройства, которые обязательно найдут место во многих ваших проектах.
Что такое шаговый двигатель?
Шаговый двигатель — это бесщеточный двигатель постоянного тока. Как уже упоминалось выше, он приводится в действие электрическими импульсами, которые преобразуются во вращательное движение. Вращение не такое плавное, как у классических двигателей постоянного тока. Полный поворот на 360 градусов состоит из определенного (в зависимости от конструкции) количества шагов. Это позволяет валу вращаться точно без какой-либо обратной связи. Так что специальная плата управления ему не нужна.
В мире хобби наиболее популярны шаговые двигатели с 200 шагами на 360°. Это означает, что вал (ротор) будет поворачиваться на 1,8° каждый раз, когда мы даем импульс (360° / 200 = 1,8°).
Направление вращения и его скорость зависят от последовательности и частоты импульсов.
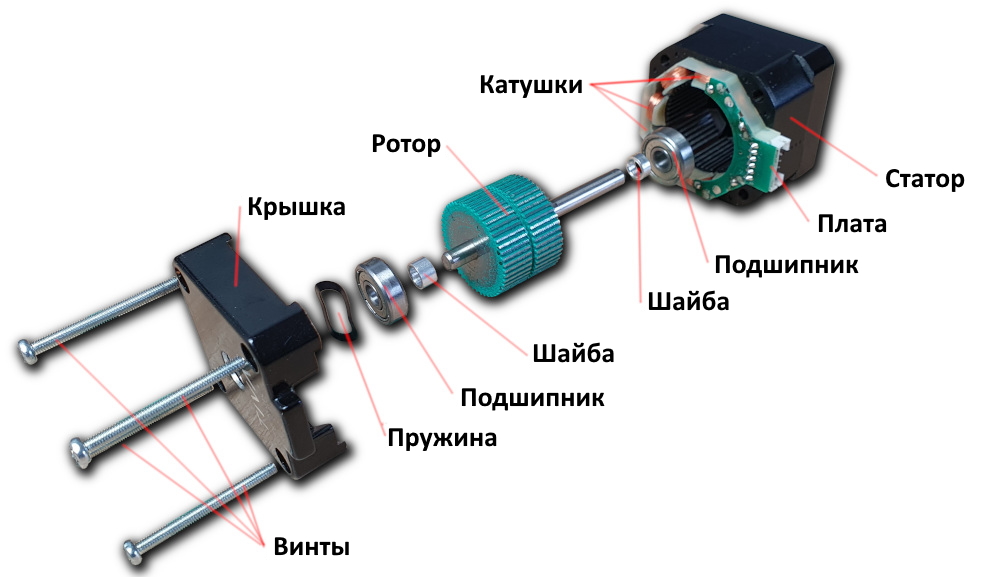
Как устроен шаговый двигатель?
Шаговый двигатель, как классический двигатель постоянного тока, состоит из Ротора и Статора . Статор — неподвижная часть, а ротор, установленный на двух подшипниках, вращается с помощью магнитного поля. Статор — изготовленный из стали или другого металла, выступает в виде рамы для поддержки электромагнитов, которые представляют собой катушки, установленные в определенных местах вокруг ротора. Когда через катушки протекает ток, вокруг них создается магнитное поле. Отдельные магнитные поля имеют направление и интенсивность в зависимости от силы и направления тока, протекающего через данную катушку.
Типы шаговых двигателей
Шаговые двигатели можно разделить по типу конструкции статора и ротора, которая влияет на то, как импульсы преобразуются в движение и по типу способа подключения катушек.
По конструкции:
- Шаговый двигатель с переменным сопротивлением
- Шаговый двигатель с постоянным магнитом
- Гибридный шаговый двигатель
По способу подключения обмоток:
- Униполярный шаговый
- Биполярный шаговый
Как работает шаговый двигатель?
Каждый тип работает по-своему, поэтому описать работу таких двигателей стоит отдельно.
Шаговый двигатель с регулируемым сопротивлением
Двигатели этого типа не имеют хороших параметров и были вытеснены из промышленности шаговыми двигателями других типов, но опишем его для понимания общего принципа работы.
Полный шаг
Сопротивление в шаговом двигателе понимается как магнитное сопротивление. Если мы поместим проводник в магнитное поле электромагнита, он будет притягиваться. Чем ближе он подойдет, тем меньше будет сопротивление.
На рисунке показан пример шагового двигателя с переменным сопротивлением с четырьмя катушками. Они намотаны попарно и на противоположных сторонах статора. Это дает нам восемь полюсов. Ротор сделан из проводника, а количество выступов (плечей) зависит от количества катушек.
Когда соответствующая пара катушек запитана, самые близкие плечи ротора притягиваются к ним больше всего. Таким образом, будет сделан один шаг. В этом случае расчет угла поворота для одного шага будет следующим:
6 плеч ротора × 4 катушки статора = 24 шага
полный оборот 360° / 24 шага = 15° — за шаг для данного шагового двигателя
Половина шага
Чтобы удвоить количество шагов, мы будем использовать Половину шага вместо Полного шага.
Для этого нужно изменить последовательность включения катушек. В предыдущем случае использовалась только одна пара катушек за раз. На этот раз мы используется две соседние дополнительные пары, чтобы сделать промежуточный шаг. Теперь у нас есть 8 комбинаций (а не 4) катушек с питанием. Это означает, что мы удвоили разрешение до 48 шагов и 7.5° для одного шага.
6 плеч ротора × 8 катушек статора = 48 шагов
полный оборот 360° / 48 шагов = 7.5° — за шаг для данного шагового двигателя
Микро шаг
Возможно еще больше увеличить разрешение. Для этого нам нужно иметь возможность регулировать ток таким образом, чтобы протекающий через катушки был вдвое меньше. Благодаря этому мы удваиваем количество возможных состояний по сравнению с методом Половины шага. Теперь мы имеем 96 шагов и 3,25° на один шаг.
6 плеч ротора × 8 катушки статора × 2 состояния силы тока = 96 шагов
полный оборот 360° / 96 шагов = 3.25° — за шаг для данного шагового двигателя
Таким образом, мы можем все больше и больше увеличивать разрешение. К сожалению, помимо очевидных преимуществ такого метода, у него есть и большие недостатки. Чем больше количество микрошагов, тем чаще переключаются катушки и, следовательно, меньше крутящий момент.
Упомянутые методы управления (Полный, Половина и Микро), применяются для шагового двигателя с переменным сопротивлением. Однако они могут также применяться для любого последующего типа двигателей.
Шаговый двигатель с постоянным магнитом
Шаговый двигатель с постоянным магнитом работает за счет взаимодействия полюсов магнитов. Разные полюса ( S — юг — N — север ) притягиваются друг к другу, а одинаковые ( S — S и N — N ) отталкиваются. В результате шаговые двигатели этого типа имеют гораздо больший крутящий момент. В отличие от шагового двигателя с переменным магнитным сопротивлением, двигатель с постоянным магнитом не имеет плеч на роторе. Он построен как бы из нескольких магнитов, попеременно и радиально намагниченных. Разрешение двигателя зависит от количества таких магнитов. Однако чем больше этих магнитов, тем они меньше по размеру и поэтому они меньше взаимодействуют с электромагнитами в статоре. В результате двигатель имеет меньший крутящий момент.
В следующем простом примере показан ротор с шестью магнитными полюсами. С двумя полюсами электромагнитов это дает 12 полных шагов на оборот. Чаще всего встречаются двигатели имеющие 24 или даже 48 шагов.
Гибридный шаговый двигатель
Гибридные шаговые двигатели в настоящее время являются наиболее популярным типом, особенно в промышленности. Они сочетают в себе преимущества двигателей с постоянным магнитом и двигателей с переменным сопротивлением. Благодаря этому у них лучшие параметры, такие как крутящий момент и разрешение. Разрешение типичного гибридного шагового двигателя составляет от 0.9° до 3.6°, что дает от 100 до 400 полных шагов на оборот, а помимо этого к ним также можно применять Микро шаг.
Ротор выполнен из постоянных магнитов, однако, в отличие от двигателя, описанного выше, магниты расположены аксиально, а не радиально. Кроме того, как вы можете видеть на картинке, ротор разделен на два (иногда четыре) кольца. У каждого из них маленькие зубцы. Чем их больше, тем выше разрешение. Зубья на обоих концах (кольцах) ротора смещены на ползуба. У статора тоже есть зубцы, но они на одной прямой. Благодаря этому, когда зубцы одного кольца имеют разные полюса и притягиваются друг к другу, зубцы второго кольца (имеющего тот же полюс, что и катушка) будут точно посередине. Это улучшает характеристики двигателя и увеличивает его крутящий момент.

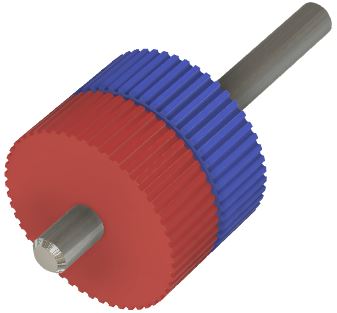
Ротор шагового двигателя
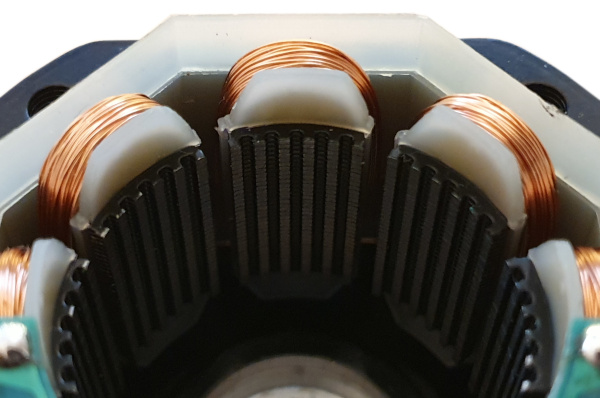
Статор шагового двигателя