Коэффициенты потери точности.
Оценка точности результатов уравнивания обычно выполняется с помощью ковариационной матрицы Кх или корреляционной матрицы Qx, которые связаны между собой через апостериорную дисперсию единицы веса σ 2 соотношением: Kx=σ2Qx. (8.23) В ковариационной матрице диагональными элементами являются дисперсии неизвестных σi 2 , недиагональные элементы (ковариации) равны произведениям стандартных ошибок и коэффициентов корреляции r, характеризующих линейную зависимость между уравненными величинами. Ковариационная матрица для навигационного решения имеет вид:  (24) Корреляционная матрица имеет вид:
(24) Корреляционная матрица имеет вид:  (25) где рi— веса уравниваемых величин. Рассмотрим случай, когда измерения псевдодальностей принимаются некоррелированными и равноточными, то есть матрица весов измерений Р определяется как P=σ2I (26) где σо— априорная средняя квадратическая ошибка единицы веса; I — единичная матрица размера s x s (s— число спутников). Поэтому корреляционная матрица вычисляется через коэффициенты в матрице уравнений поправок A:
(25) где рi— веса уравниваемых величин. Рассмотрим случай, когда измерения псевдодальностей принимаются некоррелированными и равноточными, то есть матрица весов измерений Р определяется как P=σ2I (26) где σо— априорная средняя квадратическая ошибка единицы веса; I — единичная матрица размера s x s (s— число спутников). Поэтому корреляционная матрица вычисляется через коэффициенты в матрице уравнений поправок A:  (27) Отсюда следует, что оценка точности неизвестных распадается на две части: определение средней квадратической ошибки (или дисперсии) единицы веса, которая зависит от точности измерения псевдодальностей, и нахождение обратной матрицы нормальных уравнений, которая зависит от взаимного расположения определяемого пункта и созвездия спутников, то есть от геометрии засечки. Дисперсия единицы веса σ 2 находится по результатам уравнивания, если число спутников в созвездии больше, чем четыре: σ 2 = v T v/(s — 4). (28) Для оценки влияния геометрии расположения спутников на точность навигационного решения используются коэффициенты потери точности DOP (Dilution of Precision — понижение или потеря точности). Коэффициенты DOP являются функциями диагональных элементов ковариационной матрицы уравненных параметров. В общем случае, σi=σ0DOP, (29) где σi — средняя квадратическая (или стандартная) ошибка, например, для положения в плане или по высоте. Если вектор определяемых параметров X и матрица коэффициентов А задаются уравнениями (15), то оценка точности неизвестных выполняется в соответствии с известными формулами:
(27) Отсюда следует, что оценка точности неизвестных распадается на две части: определение средней квадратической ошибки (или дисперсии) единицы веса, которая зависит от точности измерения псевдодальностей, и нахождение обратной матрицы нормальных уравнений, которая зависит от взаимного расположения определяемого пункта и созвездия спутников, то есть от геометрии засечки. Дисперсия единицы веса σ 2 находится по результатам уравнивания, если число спутников в созвездии больше, чем четыре: σ 2 = v T v/(s — 4). (28) Для оценки влияния геометрии расположения спутников на точность навигационного решения используются коэффициенты потери точности DOP (Dilution of Precision — понижение или потеря точности). Коэффициенты DOP являются функциями диагональных элементов ковариационной матрицы уравненных параметров. В общем случае, σi=σ0DOP, (29) где σi — средняя квадратическая (или стандартная) ошибка, например, для положения в плане или по высоте. Если вектор определяемых параметров X и матрица коэффициентов А задаются уравнениями (15), то оценка точности неизвестных выполняется в соответствии с известными формулами:  (30) полная ошибка положения пункта находится по формуле:
(30) полная ошибка положения пункта находится по формуле:  (31) а полная ошибка положения с учетом ошибок времени — по формуле:
(31) а полная ошибка положения с учетом ошибок времени — по формуле:  (32) Обозначим:
(32) Обозначим:  (33)
(33)  (34)
(34)  (35) Здесь через tr(. ) обозначен след матрицы. Коэффициенты потери точности DOP, называемые также геометрическими факторами, характеризуют: • PDOP (Position DOP) — понижение точности в положении пункта; • TDOP (Time DOP) — понижение точности определения времени; • GDOP (Geometrical DOP) — понижение точности положения и времени из-за геометрии. В данном контексте под геометрией понимается взаимное расположение созвездия спутников и пункта наблюдений (рис.2).
(35) Здесь через tr(. ) обозначен след матрицы. Коэффициенты потери точности DOP, называемые также геометрическими факторами, характеризуют: • PDOP (Position DOP) — понижение точности в положении пункта; • TDOP (Time DOP) — понижение точности определения времени; • GDOP (Geometrical DOP) — понижение точности положения и времени из-за геометрии. В данном контексте под геометрией понимается взаимное расположение созвездия спутников и пункта наблюдений (рис.2). 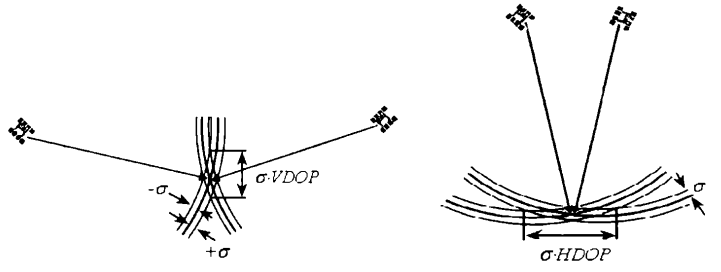 а) б) Рис. 2. Влияние геометрии: а) при расположении спутников вблизи горизонта увеличивается ошибка определения высоты σ VDOP; б) при расположении спутников вблизи зенита увеличивается ошибка определения планового положения σ HDOP Более удобно оценивать точность в топоцентрической координатной системе ENU, поскольку ошибка в координате N равна ошибке в широте, ошибка в координате Е равна ошибке в долготе, и ошибка в U равна ошибке в геодезической высоте Н. Корреляционную матрицу Qx можно преобразовать в корреляционную матрицу для этой координатной системы Q i x с использованием соотношения:
а) б) Рис. 2. Влияние геометрии: а) при расположении спутников вблизи горизонта увеличивается ошибка определения высоты σ VDOP; б) при расположении спутников вблизи зенита увеличивается ошибка определения планового положения σ HDOP Более удобно оценивать точность в топоцентрической координатной системе ENU, поскольку ошибка в координате N равна ошибке в широте, ошибка в координате Е равна ошибке в долготе, и ошибка в U равна ошибке в геодезической высоте Н. Корреляционную матрицу Qx можно преобразовать в корреляционную матрицу для этой координатной системы Q i x с использованием соотношения:  (36) Теперь, используя матрицу Q‘x, можно сделать априорную оценку точности определения положения в плане и по высоте:
(36) Теперь, используя матрицу Q‘x, можно сделать априорную оценку точности определения положения в плане и по высоте:  (37)
(37)  (38) где • VDOP (Vertical DOP) характеризует понижение точности в геодезической высоте; • HDOP (Horizontal DOP) — понижение точности в плановом положении пункта. Коэффициент потери точности GDOP является наиболее общей характеристикой, отражающей геометрию положения и оценку времени. Математически он представляет собой корень квадратный из следа обратной нормальной матрицы tr(A T A) -1 = tr(N) -1 . Геометрическая интерпретация величины PDOP при наблюдении четырех спутников связана с объемом тетраэдра, стороны которого соединяют концы единичных векторов топоцентрических направлений на спутники (рис. 3). Чем больше объем тетраэдра, тем меньше PDOP. Тетраэдр самого большого объема возможен в случае, когда один из спутников находится в зените, а три остальных спутника расположены с равными по азимуту расстояниями ниже горизонта с углом возвышения 19,47 градусов: GDOP при этом будет составлять 1,581. Естественно, GPS приемник не способен принимать сигналы от спутников, расположенных ниже горизонта, поэтому наименьший GDOP (1,732) достижим в случае, когда один из спутников находится в зените, а три остальных спутника расположены вблизи горизонта через 120° по азимуту. Некоторые ранние модели GPS приемников могли отслеживать одновременно только четыре спутника. Эти приемники использовали такой алгоритм выбора видимых спутников, при котором отслеживались только те четыре, которые обеспечивали наибольший объем тетраэдра, и, следовательно, наименьшее значение DOP.
(38) где • VDOP (Vertical DOP) характеризует понижение точности в геодезической высоте; • HDOP (Horizontal DOP) — понижение точности в плановом положении пункта. Коэффициент потери точности GDOP является наиболее общей характеристикой, отражающей геометрию положения и оценку времени. Математически он представляет собой корень квадратный из следа обратной нормальной матрицы tr(A T A) -1 = tr(N) -1 . Геометрическая интерпретация величины PDOP при наблюдении четырех спутников связана с объемом тетраэдра, стороны которого соединяют концы единичных векторов топоцентрических направлений на спутники (рис. 3). Чем больше объем тетраэдра, тем меньше PDOP. Тетраэдр самого большого объема возможен в случае, когда один из спутников находится в зените, а три остальных спутника расположены с равными по азимуту расстояниями ниже горизонта с углом возвышения 19,47 градусов: GDOP при этом будет составлять 1,581. Естественно, GPS приемник не способен принимать сигналы от спутников, расположенных ниже горизонта, поэтому наименьший GDOP (1,732) достижим в случае, когда один из спутников находится в зените, а три остальных спутника расположены вблизи горизонта через 120° по азимуту. Некоторые ранние модели GPS приемников могли отслеживать одновременно только четыре спутника. Эти приемники использовали такой алгоритм выбора видимых спутников, при котором отслеживались только те четыре, которые обеспечивали наибольший объем тетраэдра, и, следовательно, наименьшее значение DOP.  Рис. 3.Тетраэдр, вершины которого 1, 2, 3, 4 являются концами единичных векторов направлений на спутники с пункта А. Объем тетраэдра обратно пропорционален величине PDOP Средняя величина HDOP и VDOP — около двух. Как общее правило, значения PDOP больше 5 считаются слабыми, а при PDOP больше 7 ответственные измерения обычно не производятся. Коэффициенты DOP можно вычислять на будущее по приближенному положению приемника и предсказанным эфемеридам спутника. Отсюда ясно, почему матрицу коэффициентов А часто называют «матрицей плана»; действительно, можно вычислить корреляционную матрицу заранее, перед сеансом наблюдений, если знать, где будут спутники (которые берутся из альманаха навигационного сообщения). Поэтому можно так «планировать» измерения (в данном случае, выбирать время суток), чтобы точность положения не зависела от «слабой геометрии» спутников.
Рис. 3.Тетраэдр, вершины которого 1, 2, 3, 4 являются концами единичных векторов направлений на спутники с пункта А. Объем тетраэдра обратно пропорционален величине PDOP Средняя величина HDOP и VDOP — около двух. Как общее правило, значения PDOP больше 5 считаются слабыми, а при PDOP больше 7 ответственные измерения обычно не производятся. Коэффициенты DOP можно вычислять на будущее по приближенному положению приемника и предсказанным эфемеридам спутника. Отсюда ясно, почему матрицу коэффициентов А часто называют «матрицей плана»; действительно, можно вычислить корреляционную матрицу заранее, перед сеансом наблюдений, если знать, где будут спутники (которые берутся из альманаха навигационного сообщения). Поэтому можно так «планировать» измерения (в данном случае, выбирать время суток), чтобы точность положения не зависела от «слабой геометрии» спутников.
02.05.2015 91.14 Кб 12 Ксе.doc
02.05.2015 116.74 Кб 31 Курс Высшая математика.doc
11.11.2018 287.43 Кб 8 Курсач Бжд_готовый_Брусынин.docx
10.03.2016 3.69 Mб 39 Курсач Прикладная Геодезия 5 курс.pdf
02.05.2015 904.37 Кб 25 курсач.docx
02.05.2015 391.56 Кб 17 Курсач.docx
02.05.2015 765.95 Кб 23 КУРСАЧ_КАДАСТР.doc
02.05.2015 2.01 Mб 50 Курсовая работа Мухтарова.docx
10.03.2016 67.32 Кб 20 Курсовая — Охрана земель лесного фонда.docx
02.05.2015 75.83 Кб 13 Курсовая — транспортная экспедиция.docx
02.05.2015 54.86 Кб 9 курсовая.docx
Ограничение
Для продолжения скачивания необходимо пройти капчу:
Коэффициент потери точности
Коэффициент потери точности — коэффициент потери точности совокупного определения местоположения (PDOP — position deletion of precision) — определения местоположения (DOP). Фактор DOP учитывает увеличение ошибки определения местоположения в зависимости от расположения; созвездия; спутников ГЛОНАСС на момент измерений. Применительно к GNSS в зависимости от параметров уравнений используют следующие термины: GDOP, PDOP, HDOP, VDOP. Коэффициент потери точности геометрического (по вектору положения) местоположения (GDOP) (geometric deletion of precision). Коэффициент потери точности определения горизонтального (планового) местоположения (HDOP) (horizontal deletion of precision) Коэффициент потери точности определения вертикального (высотного) местоположения (VDOP) (vertical deletion of precision).
Комментарии
Модуль «Форум» не установлен.
СТАТЬИ ГЛОНАСС
3D цифровые модели с помощью беспилотников
Цифровая модель рельефа (ЦМР) — это разновидность трехмерных моделей местности, которая содержит данные только высотных показателей поверхности (без деревьев, домов и других объектов). В последние несколько лет ЦМР создаются после обработки снимков, полученных беспилотными летательными аппаратами (БПЛА).
Необходим поиск отечественных специалистов в области кибербезопасности сельского хозяйства
Перспективы реализации дорожной карты одного из направлений Национальной технологической инициативы (НТИ) в области сельского хозяйства, по просьбе журнала «Вестник ГЛОНАСС», оценил эксперт в навигационно-информационной сфере Семён Видный. В современных, быстроизменяющихся условиях особого решения требуют вопросы безопасности (направление SafeNet), тем более на таком значимом для государства агросекторе. В этом направлении на данный момент – огромное количество профессиональных участников. Но большинство из них используют иностранные наработки, что в настоящий момент и на перспективу неприемлемо. Также все профессионалы никогда не занимались этим специфическим сектором экономики – сельским хозяйством. Так что здесь придётся ещё поискать участников.
Аграриям предстоит работать в одной системе координат
Как известно, основой современного цифрового агрокомплекса является картогорафирование. Семён Видный, эксперт в области применения современных навигационно-информационных технологий в сельском хозяйстве поделился с читателями журнала «Вестник ГЛОНАСС» с кругом решаемых проблем при обработке массивов картографических данных. Таким образом, выяснилось, что все используют данные в различных системах координат, но пытаются укладывать их на одну картографическую основу и, соответственно, получают нестыковки и ошибки. Всё это приводит к тому, что используемые данные из Роскадастра, из Центров химизации и от высокоточных источников (данные дистанционного зондирования Земли, данные с беспилотников и высокоточных навигационных или геодезических приборов) не состыковываются друг с другом и только вводят в заблуждение сельхозтоваропроизводителей и собственников сельхозземель. И это также отражается на отношениях со смежными землепользователями.
Одинарная или двойная точность?
В научных вычислениях мы часто используем числа с плавающей запятой (плавающей точкой). Эта статья представляет собой руководство по выбору правильного представления числа с плавающей запятой. В большинстве языков программирования есть два встроенных вида точности: 32-битная (одинарная точность) и 64-битная (двойная точность). В семействе языков C они известны как float и double , и здесь мы будем использовать именно такие термины. Есть и другие виды точности: half , quad и т. д. Я не буду заострять на них внимание, хотя тоже много споров возникает относительно выбора half vs float или double vs quad . Так что сразу проясним: здесь идёт речь только о 32-битных и 64-битных числах IEEE 754.
Статья также написана для тех из вас, у кого много данных. Если вам требуется несколько чисел тут или там, просто используйте double и не забивайте себе голову!
Статья разбита на две отдельные (но связанные) дискуссии: что использовать для хранения ваших данных и что использовать при вычислениях. Иногда лучше хранить данные во float , а вычисления производить в double .
Если вам это нужно, в конце статьи я добавил небольшое напоминание, как работают числа с плавающей запятой. Не стесняйтесь сначала прочитать его, а потом возвращайтесь сюда.
Точность данных
У 32-битных чисел с плавающей запятой точность примерно 24 бита, то есть около 7 десятичных знаков, а у чисел с двойной точностью — 53 бита, то есть примерно 16 десятичных знаков. Насколько это много? Вот некоторые грубые оценки того, какую точность вы получаете в худшем случае при использовании float и double для измерения объектов в разных диапазонах:
| Масштаб | Одинарная точность | Двойная точность |
|---|---|---|
| Размер комнаты | микрометр | радиус протона |
| Окружность Земли | 2,4 метра | нанометр |
| Расстояние до Солнца | 10 км | толщина человеческого волоса |
| Продолжительность суток | 5 миллисекунд | пикосекунда |
| Продолительность столетия | 3 минуты | микросекунда |
| Время от Большого взрыва | тысячелетие | минута |
(пример: используя double , мы можем представить время с момента Большого взрыва с точностью около минуты).
Итак, если вы измеряете размер квартиры, то достаточно float . Но если хотите представить координаты GPS с точностью менее метра, то понадобится double .
Почему всегда не хранить всё с двойной точностью?
Если у вас много оперативной памяти, а скорость выполнения и расход аккумулятора не являются проблемой — вы можете прямо сейчас прекратить чтение и использовать double . До свидания и хорошего вам дня!
Если же память ограничена, то причина выбора float вместо double проста: он занимает вдвое меньше места. Но даже если память не является проблемой, сохранение данных во float может оказаться значительно быстрее. Как я уже упоминал, double занимает в два раза больше места, чем float , то есть требуется в два раза больше времени для размещения, инициализации и копирования данных, если вы используете double . Более того, если вы считываете данные непредсказуемым образом (случайный доступ), то с double у вас увеличится количество промахов мимо кэша, что замедляет чтение примерно на 40% (судя по практическому правилу O(√N), что подтверждено бенчмарками).
Влияние на производительность вычислений с одинарной и двойной точностью
Если у вас хорошо подогнанный конвейер с использованием SIMD, то вы сможете удвоить производительность FLOPS, заменив double на float . Если нет, то разница может быть гораздо меньше, но сильно зависит от вашего CPU. На процессоре Intel Haswell разница между float и double маленькая, а на ARM Cortex-A9 разница большая. Исчерпывающие результаты тестов см. здесь.
Конечно, если данные хранятся в double , то мало смысла производить вычисления во float . В конце концов, зачем хранить такую точность, если вы не собираетесь её использовать? Однако обратное неправильно: может быть вполне оправдано хранить данные во float , но производить некоторые или все вычисления с двойной точностью.
Когда производить вычисления с увеличенной точностью
Даже если вы храните данные с одинарной точностью, в некоторых случаях уместно использовать двойную точность при вычислениях. Вот простой пример на С:
float sum(float* values, long long count) < float sum = 0; for (long long i = 0; i < count; ++i) < sum += values[i]; >return sum; >Если вы запустите этот код на десяти числах одинарной точности, то не заметите каких-либо проблем с точностью. Но если запустите на миллионе чисел, то определённо заметите. Причина в том, что точность теряется при сложении больших и маленьких чисел, а после сложения миллиона чисел, вероятно, такая ситуация встретится. Практическое правило такое: если вы складываете 10^N значений, то теряете N десятичных знаков точности. Так что при сложении тысячи (10^3) чисел теряются три десятичных знака точности. Если складывать миллион (10^6) чисел, то теряются шесть десятичных знаков (а у float их всего семь!). Решение простое: вместо этого выполнять вычисления в формате double :
float sum(float* values, long long count) < double sum = 0; for (long long i = 0; i < count; ++i) < sum += values[i]; >return (float)sum; >Скорее всего, этот код будет работать так же быстро, как и первый, но при этом не будет теряться точность. Обратите внимание, что вовсе не нужно хранить числа в double , чтобы получить преимущества увеличенной точности вычислений!
Пример
Предположим, что вы хотите точно измерить какое-то значение, но ваше измерительное устройство (с неким цифровым дисплеем) показывает только три значимых разряда. Измерение переменной десять раз выдаёт следующий ряд значений:
3.16, 3.15, 3.16, 3.18, 3.15, 3.11, 3.14, 3.11, 3.14, 3.15Чтобы увеличить точность, вы решаете сложить результаты измерений и вычислить среднее значение. В этом примере используется число с плавающей запятой в base-10, у которого точность составляет точно семь десятичных знаков (похоже на 32-битный float ). С тремя значимыми разрядами это даёт нам четыре дополнительных десятичных знака точности:
3.160000 + 3.150000 + 3.160000 + 3.180000 + 3.150000 + 3.110000 + 3.140000 + 3.110000 + 3.140000 + 3.150000 = 31.45000В сумме уже четыре значимых разряда, с тремя свободными. Что если сложить сотню таких значений? Тогда мы получим нечто вроде такого:
314.4300Всё ещё остались два неиспользованных разряда. Если суммировать тысячу чисел?
3140.89031412.87Пока что всё хорошо, но теперь мы используем все десятичные знаки для точности. Продолжим складывать числа:
31412.87 + 3.11 = 31415.98Заметьте, как мы сдвигаем меньшее число, чтобы выровнять десятичный разделитель. У нас больше нет запасных разрядов, и мы опасно приблизились к потере точности. Что если сложить сто тысяч значений? Тогда добавление новых значений будет выглядеть так:
314155.6 + 3.12 = 314158.7Обратите внимание, что последний значимый разряд данных (2 в 3.12) теряется. Вот теперь потеря точности действительно происходит, поскольку мы непрерывно будем игнорировать последний разряд точности наших данных. Мы видим, что проблема возникает после сложения десяти тысяч чисел, но до ста тысяч. У нас есть семь десятичных знаков точности, а в измерениях имеются три значимых разряда. Оставшиеся четыре разряда — это четыре порядка величины, которые выполняют роль своеобразного «числового буфера». Поэтому мы можем безопасно складывать четыре порядка величины = 10000 значений без потери точности, но дальше возникнут проблемы. Поэтому правило следующее:
Если в вашем числе с плавающей запятой P разрядов (7 для float , 16 для double ) точности, а в ваших данных S разрядов значимости, то у вас остаётся P-S разрядов для манёвра и можно сложить 10^(P-S) значений без проблем с точностью. Так, если бы мы использовали 16 разрядов точности вместо 7, то могли бы сложить 10^(16-3) = 10 000 000 000 000 значений без проблем с точностью.
(Существуют численно стабильные способы сложения большого количества значений. Однако простое переключение с float на double гораздо проще и, вероятно, быстрее).
Выводы
- Не используйте лишнюю точность при хранении данных.
- Если складываете большое количество данных, переключайтесь на двойную точность.
Приложение: Что такое число с плавающей запятой?
Я обнаружил, что многие на самом деле не вникают, что такое числа с плавающей запятой, поэтому есть смысл вкратце объяснить. Я пропущу здесь мельчайшие детали о битах, INF, NaN и поднормалях, а вместо этого покажу несколько примеров чисел с плавающей запятой в base-10. Всё то же самое применимо к двоичным числам.
Вот несколько примеров чисел с плавающей запятой, все с семью десятичными разрядами (это близко к 32-битному float ).
1.875545 · 10^-18 = 0.000 000 000 000 000 001 875 545
3.141593 · 10^0 = 3.141593
2.997925 · 10^8 = 299 792 500
6.022141 · 10^23 = 602 214 100 000 000 000 000 000
Выделенная жирным часть называется мантиссой, а выделенная курсивом — экспонентой. Вкратце, точность хранится в мантиссе, а величина в экспоненте. Так как с ними работать? Ну, умножение производится просто: перемножаем мантисссы и складываем экспоненты:
1.111111 · 10^42 · 2.000000 · 10^7
= (1.111111 · 2.000000) · 10^(42 + 7)
= 2.222222 · 10^49
Сложение немного хитрее: чтобы сложить два числа разной величины, сначала нужно сдвинуть меньшее из двух чисел таким образом, чтобы запятая находилась в одном и том же месте.
3.141593 · 10^0 + 1.111111 · 10^-3 =
3.141593 + 0.0001111111 =
3.141593 + 0.000111 =
3.141704
Заметьте, как мы сдвинули некоторые из значимых десятичных знаков, чтобы запятые совпадали. Другими словами, мы теряем точность, когда складываем числа разных величин.
- float
- double
- плавающая запятая
- плавающая точка
- одинарная точность
- двойная точность
2 какую размерность имеют коэффициенты потери точности
В.Д.Попов. Контроль параметров зеркал лазерных гироскопов. Лекции. 1996.
ЛЕКЦИЯ 2. ИЗМЕРЕНИЕ КОЭФФИЦИЕНТА ОТРАЖЕНИЯ
На предыдущей лекции мы рассмотрели вредную часть полного коэффициента отражения — коэффициент рассеяния или коэффициент диффузного отражения. Рассмотрим теперь более подробно полезную часть — коэффициент зеркального отражения.
Напомню теорию отражения света от диэлектрика. Пусть луч света падает на границу раздела сред 1 и 2 (рис.14). Выбираем систему координат таким образом, чтобы плоскость xOy совпадали с плоскостью раздела сред, а плоскость zOx — с плоскостью падения. Плоскость падения называется плоскость, проходящая через луч падающий, луч отраженный и нормаль к плоскости падения. Произвольное состояние поляризации в падающей волне может быть представлено в виде двух компонент — одна из компонент имеет напряженность электрического поля в плоскости падения и, следовательно, в силу поперечности электромагнитной волны, магнитный вектор перпендикулярен к плоскости падения. Такая компонента обозначается символами ТМ (сокращение английского transverse magnetic) или p-(parallel). Перпендикулярная компонента называется TE (transverse electric) или s-(saggital).
 |
| Рис.14. Ход лучей при отражении света.Основные обозначения |
Схемы расположения волновых векторов и напряженностей в падающей, отраженной и преломленной волне изображены на рис.14. Между амплитудами падающей, отраженной и преломленных волн существуют соотношения, известные как формулы Френеля.
Амплитудные коэффициенты отражения в данном случае — величины вещественные. Поэтому фазы отраженной, преломленной и падающей волн либо совпадают, либо отличаются на p . Заметим, что направления, выбранные для наших векторов в качестве положительных, конечно, условны (так же, как во всякой геометрической задаче). Найденные соотношения имеют общий смысл, пока мы придерживаемся на всем протяжении своего рассмотрения единых обозначений. Наш выбор положительных направлений означает, в частности, что волны i, r и t совпадают по фазе, если амплитуды Ei, Er и Et имеют одинаковые знаки, и противоположны по фазе, если знаки различны. Мы следуем тем соглашениям о правилах знаков, которые приняты в эллипсометрии [Аззам и Башара]. Рассматривая какой-либо вопрос следует придерживаться одной системы обозначений и соглашений — чтобы не прийти к противоречивым заключениям. Это тем более важно, что соглашения о правилах знаков не являются общепринятыми.
Из формул 2 и 4 следует, что при любом значении углов y и j знаки Etp и Eip и знаки Ets и Eis совпадают между собой. Это означает, что на поверхности раздела и фазы их совпадают, т.е. преломленная волна во всех случаях сохраняет без изменения фазу падающей. Для компонент отраженной волны в зависимости от угла падения и значения показателя преломления сред будут иметь место различные соотношения, в частности, при y + j < p /2 и j >y (т.е. при n1>n2) Ers и Eip противоположны по знаку. Это означает, что при отражении от более плотной среды происходит потеря полуволны, скачки фаз при отражении различны и разность скачков фаз составляет p .
Из формулы 1 также следует, что при tg( y + j ) ® ¥ и rp ® 0. Условие rp удовлетворяется при угле падения
На опыте всегда можно удовлетворить этому условию. Например, для стекла с n=1,5 j =56°19′; для кварца марки КУ-1 n=1,4571 j Б=56°33′.
Соответствующий угол j Б называют углом Брюстера, а обращение в нуль коэффициента отражения rp при j = j Б называют законом Брюстера.
Разность скачков фаз в p означает, что диэлектрическая отражающая поверхность действует так же как фазовая пластинка в l /2. Этот факт легко проверяется эспериментально и является следствием того, что отраженный в зеркале мир имеет противоположную симметрию — правое становится левым и наоборот. То же справедливо для состояния поляризации света — направление поляризации при отражении изменяется на противоположное.
Меняет знак поляризации также и рассеянное излучение. В зеемановском кольцевом лазере этот эффект дает так называемую полязирационную развязку, то есть уменьшение связи встречных волн через рассеяние за счет использования круговой поляризации. К сожалению, вследствие частичной деполяризации рассеянного излучения эффект поляризационной развязки не превышает 10 раз.
Физическое истолкование смысла закона Брюстера может быть дано на основе представления о вторичных волнах, испускаемых атомами или молекулами вещества. Падающая волна возбуждает в среде II колебания электронов, которые становятся источником встречных волн; эти волны и дают отраженный свет. Направление колебаний электронов совпадает с направлением электрического вектора световой волны, то есть для среды II перпендикулярно к преломленной волне.
Представим, что свет с электрическим вектором в плоскости чертежа падает под углом Брюстера, т.е. y + j = p /2. Это означает, что отраженный луч перпендикулярен преломленному. Однако известно, что колеблющийся электрический заряд не излучает электромагнитных волны вдоль направления своего движения, т.е. отражение в направлении отраженной волны отсутствует.
Энергетические коэффициенты отражения для двух поляризаций получаются из формул 1 и 2 путем из возведения в квадрат. Зависимость энергетических коэффициентов отражения от угла падения представляется графиками (рис.15).
 |
| Рис.15. Зависимость коэффициента отражения прозрачного диэлектрика (n=1,52, стекло) от угла падения. |
При нормальном падении коэффициент отражения в двух поляризациях равен между собой, ибо теряет смысл понятие поляризации, и коэффициент отражения
Формула (5) не следует непосредственно из соотношений Френеля, ибо формулы (1) и (3) при j ® 0 имеют неопределенность вида 0/0.
Из формулы (5) следует, что коэффициент отражения при нормальном падении тем больше, чем больше показатель преломления.
Из графика рис.15 следует, что коэффициент отражения в s-поляризации при всех углах падения больше коэффициента отражения в p-поляризации. Это соотношение между коэффициентами отражения сохраняется у многослойного покрытия.
Коэффициент отражения многослойного покрытия зеркала представляет собой важнейшую характеристику зеркала, определяющую возможность получения генерации в резонаторе кольцевого лазера.
Вследствие явной зависимости от поляризации коэффициент отражения должен измеряться в двух поляризациях, например, в двух линейных p- и s-поляризациях. Если измерять коэффициент отражения в круговой поляризации, то остается неизвестным параметр, связанный с разностью коэффициентов отражения — амплитудная анизотропия.
Практически, учитывая, что коэффициенты потерь (единица минус коэффициент отражения) в s-полязирации всегда меньше, чем p-поляризации, иногда в технологии допускается измерять только те потери, которые больше, т.е. в p-поляризации.
Рассматривая методики измерения рассеяния, мы могли пренебречь зависимостью рассеяния от поляризации: либо потому, что при измерении мал угол падения (4° — при измерении интегрального рассеяния), либо потому, что такая зависимость мала или неоднозначна.
Вообще говоря, коэффициент отражения можно измерять с помощью установки для измерения рассеяния, рассмотренной на прошлой лекции — с помощью схемы однолучевого фотометра.
Плохо то, что точность таких измерений невелика — 10% от измеряемой величины, т.е. фактически от 100%. Реально нужно измерять коэффициенты отражения 99-100% с погрешностью 0,01%.
Мы применяем установку для измерения потерь, основанную на методе внесения калиброванных оптических потерь.
Такая установка не дает наивысшей точности измерений — есть методы лучше; не обладает, может быть, наилучшей производительностью. Мы рекомендуем установку потому, что она наиболее продвинута в конструктивном и технологическом отношении, имеются чертежи и эксплуатационная документация, решены вопросы метрологической аттестации и поверки — то, чем не располагают те установки, о которых имеются сообщения в печати.
 |
| Рис.16. Схема установки для измерения потерь зеркал. 1 — плоское подвижное зеркало установки, 2 — измеряемое зеркало, 3,4 — пластинки механизма внесения потерь, 5 — фильтр, отрезающий 3,39 мкм, 6 — активный элемент, 7 — диафрагма, 8 — сферическое зеркало, 9 — светофильтр, 10 — фотоприемник, 11- индикаторный прибор. |
Установка для измерения коэффициентов потерь зеркал (рис.16) содержит He-Ne лазер, образованный зеркалами 1 и 8 и активным элементов 6. Зеркало 8 сферическое, имеет заметный коэффициент пропускания (более 0,3%) и установлено в юстировочном механизме. Зеркало 1 установлено также в юстировочном механизме и может занимать 3 положения 1, 1′ и 1». Положение 1» не показано на рисунке, поскольку соответствует повороту над плоскостью чертежа и относится к измерениям в TE-поляризации. Внутри резонатора установлен механизм внесения потерь, состоящий из двух кварцевых пластинок 3 и 5, установленных под углом Брюстера, связанных друг с другом кинематически и снабженных отсчетным механизмом угла с точностью около 1′. Активный элемент установки должен обеспечивать генерацию только на одной длине волны. Поскольку He-Ne активная среда имеет несколько переходов, на которых возможна инверсная заселенность и, соответственно, лазерная генерация, необходимо принимать меры, чтобы генерация возникала только на одной длине волны, а именно 632,8 нм. Особенно вредна генерация на длине волны 3390 нм (ИК переход). Коэффициент усиления активной среды на l =3390 нм составляет ~103 1/м (против ~0,1 1/м для перехода 632,8 нм). Переход с l =3390 нм имеет общий верхний уровень с переходом l =632,8 нм и опустошает его — мощность генерации на l =632,8 уменьшается. Для обеспечения генерации на одной длине волны внутрь резонатора вводится селектирующий фильтр 5, изготовленный из материала с большим поглощением на l =3390 нм, например, из стекла ЛК-4. Наилучшие результаты получаются с метановым фильтром, состоящим из двух кварцевых пластинок, пространство между которыми заполнено метаном (природный газ содержит более 70% метана).
За сферическим зеркалом установлен фотоприемник 9, соединенный с индикаторным прибором 10. Для защиты от спонтанного излучения активной среды фотоприемник снабжен светофильтром 8. Другим способом защиты от спонтанного излучения, примененным в нашей установке, является увеличение расстояния между зеркалом и фотоприемником. Чтобы не увеличивать габариты установки, луч поворачивается системой зеркал.
Измеряемое зеркало помещается на предназначенное для него место; зеркало 1 установки занимает положение 1′ (или 1» — в зависимости от состояния полязирации, в котором производятся измерения).
В полученном Г-образном резонаторе элементы юстируются на максимум мощности генерации с помощью органов юстировки подвижного зеркала.
Сферическое зеркало при проведении измерений не юстируется для того, чтобы обеспечить по возможности стабильное положение каустики внутри активного элемента и обеспечить тем самым стабильность коэффициента усиления, а также избежать смещения измеряемой зоны поверхности зеркала.
На рис.17 дана фотография установки со снятыми кожухами, где хорошо видны элементы ее конструкции.
 |
| Рис.17. Конструкция установки для измерения коэффициентов отражения зеркал. |
На рис.18 показана та часть установки, которая позволяет осуществлять измерения потерь в двух состояниях поляризации. Измерения в p-поляризации производятся в одной плоскости — так, как это показано на рис.16. При измерении в s-поляризации измеряемое зеркало поворачивается на 90° вокруг оси, параллельной от трубки. Зеркало установки 7 занимает тогда положение в верхнем юстировочном механизме.
 |
| Рис.18. Конструкция поворотного стола установки для измерения коэффициентов отражения зеркал. |
Возможны два различных метода проведения измерений; условно назовем один из них «по мощности» генерации, другой — «по порогу».
При измерении потерь «по мощности» генерации установка должна быть более тщательно отъюстирована; генерация должна осуществляться в одномодовом режиме; каустика моды должна идти по центру активного элемента
Измеряемое зеркало устанавливается на отведенное ему место, подвижное зеркало установки помещается в положение 7′, и установка с помощью юстировочного механизма зеркала 7′ юстируется на максимум мощности генерации, уровень которой Р1 регистрируется индикаторным прибором 10. Затем измеряемое зеркало удаляют, а зеркало установки перемещают в положение 7.
С помощью юстировочного механизма 7 зеркало снова юстируется на максимум мощности генерации. В этом случае потери в резонаторе меньше на величину потерь измеряемого зеркала, и мощность генерации Р2>Р1. Избыток мощности генерации уменьшается путем введения потерь, возникающих при повороте пластин механизма внесения потерь от угла Брюстера. При достижении равенства Р2=Р1 потери, внесенные механизмом внесения потерь, равны потерям измеряемого зеркала. Угол поворота пластин от угла Брюстера отсчитывается и с помощью графиков, таблиц или компьютера пересчитывается в потери измеряемого зеркала.
При измерении потерь «по порогу» измеряется угол поворота пластин, необходимый для полного погасания генерации, в двух состояниях резонатора установки: с измеряемым зеркалом (А1) и без него (А2). Таким образом измеряется запас коэффициента усиления активной среды G(А1) и G(А2).
Разность G(А2)- G(А1) — потери измеряемого зеркала.
В отличие от первого метода в этом случае не требуется столь точная юстировка — генерация имеется сразу в любом положении. Метод 2 несколько уступает по точности первому — так как измеряемая малая величина потерь получается как разность двух сравнительно больших. Зато закон распределения погрешности более близок к нормальному. Несмотря на большее число отсчетов производительность этого метода выше за счет отсутствия трудоемких юстировок. Основное преимущество второго метода — возможность измерения коэффициентов потерь зеркал на сферических подложках. В методе измерения потерь по мощности генерации при сферическом измеряемом зеркале в Г-образном и прямом резонаторе существенно различны объемы взаимодействия моды с активной средой и, как следствие, различна мощность генерации. Коэффициент усиления активной среды, точнее, его превышение над потерями или запас коэффициента усиления в первом приближении зависит только от длины активной части — что дает возможность измерять потери сферических зеркал, с которыми резонатор сохраняет устойчивость. Практически могут быть измерены сферические зеркала с радиусом кривизны R>3000 мм.
Вследствие высоких требований к точности измерений потерь первоначальная юстировка установки представляет собой сложную задачу. Рассмотрим последовательность юстировки установки.
Пусть собран резонатор из двух зеркал: плоского и сферического; заведомо известно, что зеркала хорошие. Между ними установлена газоразрядная трубка, включен разряд. Резонатор должен быть съюстирован визуально.
 |
| Рис.19. Схема визуальной юстировки He-Ne лазера. а) — конструкция оправы юстировочного светофильтра. б) — расположение зеркала резонатора (1), юстировочного светофильтра (2) и глаза наблюдателя (3) при юстировке. в) — вид поля зрения наблюдателя. 1 — зеркало, 2 — покрытие зеркала, 3 — окно активного элемента. 4 — ближний край трубки активного элемента. 5 — дальний край трубки, 6 — отражение перекрестия юстировочного светофильтра в покрытии зеркала. |
Для визуальной юстировки применяется светофильтр, конструкция которого показана на рис.19 а). Светофильтр изготовлен из стекла КС-17 и имеет оправу с ручкой. Она сторона оправы имеет чернение, другая покрашена в белый цвет и имеет гравированное перекрестие,закрашенное в черный цвет. Светофильтр располагается между глазом наблюдателя и одним из зеркал резонатора (рис.19 б). Глаз наблюдателя должен быть расположен по оси трубки, т.е. ближний и дальний края трубки должны быть концентричны. С помощью юстировочного механизма необходимо совместить центр отражения перекрестия светофильтра в зеркале с центром трубки. Затем такая операция повторяется с другой стороны резонатора — юстируется второе зеркало. Критерием правильности юстировки зеркал является: 1) наличие в центре трубки отражения трубки в противоположном зеркале; 2) наличие яркого «предгенерационного» пятна, пропадающего при нарушении правильной юстировки; 3) возникновение генерации.
В случае 1 необходимо более точной юстировкой добиться возникновения предгенерационного пятна. В случае 3 производится юстировка на максимум мощности генерации, которая контролируется визуально. В случае 2 необходимо протереть (очистить) окна трубки. Для протирки используется вата хлопчатобумажная медицинская глазная и спирт этиловый двойной перегонки из пищевого сырья. Кусочек ваты диаметром 1,2-2 см выворачивается так, чтобы наружу вышли внутренние волокна и сворачивается тампоном. На ватный тампон наносится 1-2 капли спирта из капельницы и немедленно производится протирка окна одним движением. Тампон используется только один раз. Как правило, на протирку одной поверхности уходит от двух до пяти тампонов. Контроль качества протирки ведется визуально по яркости свечения протираемой поверхности.
Как правило, протирка окон при наличии «предгенерационного» пятна приводит к возникновению генерации. В случае отсутствия генерации и наличии пятна следует попытаться поменять разрядный ток, изменяя его в пределах от 10 до 50 мА. если генерация все равно не возникает, следует считать трубку дефектной.
Затем устанавливаются пластинки механизма внесения потерь и грубо ориентируются под угол Брюстера. Генерация должна появиться сразу или после протирки пластинок. При наличии генерации положение пластинок уточняется по минимуму отражения от них.
Затем зеркало установки перемещается в положение 7′ (рис.16), устанавливается измеряемое зеркало, резонатор снова юстируется до получения генерации. Путем постепенного перемещения сферического зеркала достигается совмещение пятна генерации с центром измеряемого зеркала. Затем такая же операция производится в другой поляризации: необходимо добиться, чтобы при изменении поляризации пятно смещалось по поверхности зеркала не более чем на доли мм.
В различных положениях зеркала установки луч должен попадать в одну и ту же точку. Достигается это перемещением соответствующих юстировочных механизмов в пределах, определяющихся размерами прорезей для винтов крепления — в одном направлении, и изменением количества прокладок под этими механизмами — в другом. Первоначальные положения луча на зеркале установки отмечаются на обратной стороне подложки с помощью тонкого фломастера или капиллярной ручкой. Эта юстировка производится под визуальным контролем; нескорректированное смещение составляет около 0,1 мм.
Последней юстировочной операцией устанавливается нуль механизма внесения потерь — пластинки при этом должны точно установиться под углом Брюстера. Для этой операции используется зависимость потерь от угла падения вблизи угла Брюстера (рис.20).
 |
| Рис.20. Зависимость мощности излучения Р и потерь L от угла поворота пластинок механизма внесения потерь. |
Напомним, что пластинки установлены ранее под углом, близким к углу Брюстера — ошибка может составлять 15-20′. Вращая маховичок механизма внесения потерь против часовой стрелки, устанавливается мощность генерации, заметно отличающаяся от максимальной, например, Р1. Этой мощности соответствует угол поворота пластин j 1, отсчитанный по лимбу механизма внесения потерь. Затем маховичок вращается по часовой стрелке до тех пор, пока мощность генерации, пройдя максимум, примет то же значение Р1 при угле поворота j 2 (внимательно отсчитывать угол при повороте маховика по часовой стрелке!).Вычисляется суммарный угол j 1+ j 2 и, пользуясь табличной зависимостью L( j 1+ j 2) определяется уровень потерь L1, внесенных в резонатор. Затем, по другим таблицам определяются углы j 1′(L1) и j 2′(L1), которые соответствуют потерям L1 и отсчитаны от правильного исходного положения. Разность представляет собой поправку, на которую нужно сместить лимб механизма внесения потерь относительно маховичка. Поскольку лимб механизма внесения потерь должен быть установлен с точностью 1′-3′, эти измерения производятся в 10 точках диапазона измерения потерь, вычисляется средняя поправка, на которую сдвигается лимб. Для освобождения лимба относительно маховичка, необходимо ослабить три винта, расположенных на маховичке.
В настоящее время существует масса других методов измерения малых потерь. Наиболее полный обзор этих методов приведен в книге [Бухштаба]. Еще раз подчеркнем, что использованный нами метод и основанная на нем установка не могут считаться наиболее точными на данный момент времени; но они более всего продвинуты в конструктивном, технологическом и метрологическом отношении.
 |
| Рис.21. Структура погрешности установки для измерения потерь, основанной на методе внесения калиброванных потерь. |
На рис.21 представлена структура погрешности установки для измерения потерь и приведены величины оценок отдельных составляющих. Хотя масштаб величин составляющих погрешности имеет размер от 10 до 100 ррм, их большое количество способно снизить точность установки до 1000 ррм=0,1%. Анализ составляющих погрешности, разумеется, возможен; часть их подробно исследована в наших работах. Однако, с чисто практической целью можно получить оценки точности другим методом.
Как известно, задача обеспечения единства измерений сводится, грубо говоря к указанию для каждого результата измерения некоего интервала, называемого доверительным, в пределах которого действительное значение измеряемой величины находится с некоторой вероятностью, называемой доверительной.
Задача обеспечения единства измерений решается в государственном или всемирном масштабе путем разработки и хранения эталонов, поверочных схем и т.д. Такие эталоны существуют для измерений, которые производятся достаточно массово. Вряд ли будет когда-либо целесообразно воздавать и хранить эталон коэффициента отражения. Задачу обеспечения единства измерений коэффициента отражения можно решить другим путем.
Если в нашем распоряжении имеется достаточно большой статистический материал, полученный на разных экземплярах средства измерения, на разных объектах и т.д., то величины оценок доверительного интервала и доверительной вероятности могут быть получены чисто эмпирически. За рамками такого метода остаются те виды погрешности, которые свойственны всему классу измерительных средств, т.е. методические.
Мы применили для обеспечения единства измерений коэффициента отражения зеркал статистический метод кругового сличения.
- Наличие некоторого числа однотипных измерительных средств. Достоверность результатов, полученных методом кругового сличения увеличивается с увеличением количества измерительных средств.
- Должны быть сделаны определенные предположения относительно соотношения точностей отдельных установок. Простейшее предположение — равенство точностей всех установок. В последующих сличениях в качестве исходного может использоваться соотношение точностей, полученное в предыдущем сличении.
- Должны быть известны или заданы законы распределений случайных величин, характеризующих процесс измерения. Мы предполагали справедливым нормальный закон распределения погрешностей.
- Сличение должно производиться в нескольких точках диапазона измерений — как минимум, в начале и конце диапазона измерений. Для каждой точки диапазона измерений должны быть приготовлены контрольные образцы. Учитывая, что RP
Анализ показал, что средние коэффициенты на каждый из установок не совпадают, т.е. имеются систематические погрешности, которые могут быть учтены, например, постоянными поправками :
или поправками, зависящими от измеряемой величины (линейно)
где коэффициенты определяются методом линейной регрессии:
Средние квадратические отклонения поправок Sk являются оценками погрешности k-той установки
Эмпирическая дисперсия поправок характеризует среднее квадратическое отклонение систематической составляющей погрешности для всех установок:
В двух последних формулах поправки могут быть постоянными или линейно зависящими от измеряемой величины.
При первом сличении наших установок величина S D оказалась равна 0,1%, причем в диапазоне потерь от 0 до 0,5% она составляет 0,07%, а в диапазоне потерь от 0,5 до 1° — 0,13%. Использование постоянных поправок уменьшает погрешность примерно вдвое, а зависящих от измеряемой величины — почти на порядок.
Систематическое использование методики кругового сличения для поверки установок позволяет держать под контролем парк измерительных средств, и, своевременно проводя профилактические работы по юстировке установок, замене зеркал и т.д., держать погрешность всех установок на уровне 0,02%-0,03%.
Описанная методика кругового сличения обладает двумя существенными недостатками. Во-первых, она чрезвычайно трудоемка — число измерений составляет 2·N·M·2·n, что при N=6, M=9, n=6 дает 1944. Расчеты не представляют существенных трудностей — существует программа, позволяющая получать результаты достаточно оперативно.
Вторым недостатком является то, что, находясь в рамках одного измерительного метода, мы не гарантированы от существования постоянной методической ошибки. На возможность существования такой погрешности указывает также тот факт, что в нашей практике наблюдалось систематическое превышение суммы потерь зеркал, измеренных нашим методом, над суммарными потерями образованного ими резонатора, которые измеряются по ширине резонансного пика.
Мы использовали всюду предположение, что распределения погрешностей подчиняются нормальному закону. Это предположение кажется естественным, но, к сожалению, оно несправедливо. Мы неоднократно исследовали это распределение и убедились, что оно не соответствует нормальному закону. Главное отличие эмпирического распределения заключается в его несимметричности (рис.22).
 |
| Рис.22. Эмпирическое частотное распределение коэффициентов интегрального обратного рассеяния, покрытие ZnS-MgF2 , 21 слой, n — число образцов. |
Действительно, нормальный закон предполагает, что рассматриваемая величина может принимать, по крайней мере принципиально, любое значение от -Ґ до +Ґ, или, по крайней мере любое значение на интервале, значительно большем величины d среднего квадратического отклонения, характеризующего данное распределение. В нашем случае измеряемая величина ограничена положительными значениями и очень близка к краю области определения.
С другой стороны, известно, что в силу теоремы Ляпунова нормальный закон распределения справедлив, когда имеется множество независимых влияющих факторов. В нашем случае большая часть факторов действует в сторону увеличения коэффициента потерь и, следовательно, условия применимости теоремы Ляпунова нарушаются.
Итак, мы рассмотрели различные аспекты измерений энергетического коэффициента отражения (потерь). Займемся фазовой частью коэффициента отражения.
Отражение светового пучка от некоторой однородной отражающей системы описывается путем введения двух комплексных коэффициентов отражения
; ;
здесь Esотр, Esпад, Epотр, Epпад — комплексная амплитуды электрических векторов отраженного и падающего световых пучков для s- и p- компонент соответственно;
rs и rp характеризуют изменение модулей комплексных амплитуд, а
d S и d P — фазовые сдвиги.
В качестве характеристики отражающей системы, поддающейся экспериментальному определению, удобно ввести относительный коэффициент отражения
 |
| Рис.23. Действие полуволновой пластинки. а) — падающий луч, б) — прошедший луч. |
Общепринятыми являются обозначения: rp/rs = tg y ; d p — d s = D
Величины D и y называются поляризационными или эллипсометрическими углами.
Величина D k= D — p в теории кольцевых лазеров называется фазовой анизотропией, т.е. это дополнительная к p разность скачков фаз p- и s- компонент отраженного света.
Физически наличие фазовой анизотропии приводит к изменению состояния поляризации.
Заметим, что в теории кольцевых лазеров используется также понятие амплитудной анизотропии:
Нетрудно получить, что для высокоотражающих зеркал величина c мала; соответственно для них y » p /4 с точностью 1-2 угловых минуты.
В первой лекции мы выяснили, что действие идеального зеркала на пучок эквивалентно действию фазовой пластинки в l /2; поворот падающей линейной поляризации на угол a приводит к повороту поляризации в отраженном луче на угол 2 a относительно одного из главных направлений (рис.23). Если реальный сдвиг на зеркале не равен p, эффект действия фазовой пластинки не сведется к повороту плоскости поляризации, а даст эллипс поляризации. Максимальная приобретаемая эллиптичность соответствует азимуту поляризации (углу между главным направлением и электрическим вектором падающей волны), равному p/4. На таком принципе основан простейший метод измерения фазовой анизотропии зеркал.
 |
| Рис.24. Простейшая установка для измерения фазовой анизотропии зеркал. 1 — лазер, 2 — поляризатор, 3 — Измеряемое зеркало, 4 — анализатор. 5 — фотоприемник, 6 — измерительный прибор. |
Установка (Рис.24) состоит из лазера 1, поляризатора 2, измеряемого зеркала 3, анализатора 4 и фотоприемника 5 с измерительным прибором. Для измерений при различных углах падения j анализатор и фотоприемник размещены на основании, имеющем возможность поворота вокруг оси, лежащей в плоскости измеряемого зеркала. Поляризатор 2 установлен так, что электрический вектор составляет 45° с плоскостью падения. Анализатор вращают и измеряют максимальную Imax и минимальную интенсивность Imin прошедшего света. Фазовая анизотропия вычисляется по формуле ,
где — e — эллиптичность отраженного света.
Следует учитывать, что поскольку Imax/Imin«10 4 . 10 6 , от фотоприемника требуется высокая линейность световой характеристики. Например, может быть использован фотодиод в режиме короткого замыкания.
Чувствительность и точность такого метода измерения составляет около 0,01 радиана (~0,6 градуса). На таком фотометрическом методе была основана установка, применявшаяся нами ранее.
Поскольку требования к зеркалам прибора ZLK-16 не слишком высоки ( ½ D ½ не более 0,1 радиан), такая установка была бы достаточна для технологического контроля зеркал. Мы поставляем вам на порядок более чувствительную установку для того, чтобы вы могли ставить и решать некоторые задачи по анализу отказов датчиков. Более подробно я расскажу об этом в лекции 4.
Значительно более высокая точность свойственна так называемому методу гашения. В этом методе падающему лучу придается такая эллиптичность, чтобы после отражения от измеряемого образца поляризация стала строго линейной.
 |
| Рис.25. Оптическая схема установки для измерения фазовой анизотропии зеркал. основанной на методе гашения. 1 — лазер. 2 — круговой поляризатор, 3 — поляризатор, 4 — компенсатор, 5 — измеряемое зеркало, 6 — анализатор, 7 — фотоприемник, 8 — индикаторный прибор. |
Оптическая схема такой установки показана на рис.25. Схема содержит оптический компенсатор 4, в качестве которого используется пластинка l /4 (компенсатор Сенармона). Эффект действия пластинки l /4 показан на рис.26.
 |
| Рис.26. Действие четвертьволновой пластинки. а) -падающая волна, б) — прошедшая волна. |
Компенсатор устанавливают так, чтобы его оси составляли угол ±45° с плоскостью падения. Поляризатор и анализатор вращают вокруг оси, параллельной оси луча так, чтобы получить полное гашение падающего луча. Для наблюдения гашения применяется фотоприемник с индикаторным прибором. Поляризатор, анализатор и компенсатор имеют устройства, позволяющие отсчитывать их углы поворота, из которых вычисляются поляриметрические углы измеряемого образца. Необходимо учесть, что физически неразличимыми являются 2 положения анализатора (отличающиеся друг от друга на 180°), 2 положения анализатора и т.д. — всего 32 различных отсчета, распределяющихся по четырем так называемым измерительным зонам. В принципе измерение достаточно произвести один раз в одной из зон. К сожалению, такое измерение обременено большой систематической погрешностью из-за неидеальности оптических элементов. Более широкое применение получили измерения в двух и четырех измерительных зонах.
Конструкция установки для измерения фазовой анизотропии показана на рис.27.
 |
| Рис.27. Устройство установки для измерения фазовой анизотропии. 1 — основание, 2 — блок управления, 3 — крышка, 4 — устройство поворота компенсатора, 5 — устройство поворота поляризатора, 6 — крышка, 7 — ручка поворота поляризатора, 8 — винты, 9 — ручка переключателя источника, 10 — плечо поляризатора, 11 — микрообъектив, 12 — экран отсчёта угла поляризатора, 13 — экран отсчета угла падения, 14 — патрон с лампой подсветки, 15 — индикатор, 16 — корпус, 17 — экран коллимационного устройства, 18 — экран отсчёта угла поляризатора, 19 — плечо анализатора, 20 — ручка переключения индикации, 21 — ручка переключения приемника, 22 — ручка поворота поляризатора, 23 — крышка, 24 — устройство поворота анализатора, 25 — крышка, 26 — трубка с диафрагмой, 27 — зеркало, 28 — ручка, 29 — источник питания лазера, 30 — спаренная ручка, 31 — ручка фиксатора, 32 — кронштейн, 33 — винты, 34 — столик, 35 — уровень, 36 — опора, 37 — трубка с диафрагмой |
Процедура измерения фазовой анизотропии заключается в том, что после первоначальной юстировки измеряемого образца,
 |
| Рис.28. Характерные зависимости фазовой анизотропии от угла падения. |
элементы оптической схемы — поляризатор и анализатор приводятся в положение гашения. При этом эллиптическое излучение, падающее на образец, преобразуется образцом в строго линейно поляризованное, которое затем гасится анализатором. Практически процесс нахождения положения гашения состоит из двух частей: первоначально используется визуальная индикация на экране 17, затем прибор переключается на фотоэлектрический метод индикации и отыскивается минимум сигнала на индикаторном приборе 15.
Пересчет положений поляризатора и анализатора в значения параметров D и y может производиться по несложным формулам, отличающимся в различных зонах. Выбор зон представляет собой довольно сложную логическую задачу, поэтому мы рекомендуем для расчетов пользоваться нашей программой.
Установка имеет чувствительность около ±1 угл. мин. и позволяет измерять фазовую анизотропию с точностью ±10 угл.мин.(0,003 рад) и параметр y с точностью ±2угл.мин.
Фазовая анизотропия представляет параметр, сильно зависящий от толщины последнего слоя покрытия. Точно напыленный четвертьволновый слой имеет нулевую фазовую анизотропию. Характерная зависимость фазовой анизотропии от угла падения излучения показана на рис.28.
У всякого зеркала существует ненулевой угол фазовой изотропности.
Если угол фазовой изотропии больше угла падения, то фазовая анизотропия отрицательна и наоборот.
Фазовая анизотропия зеркала сильно зависит от всех параметров процесса напыления и, поскольку контроль ведется по коэффициенту пропускания свидетеля, получение требуемых значений фазовой анизотропии представляет собой довольно сложную технологическую задачу. В качестве примера на рис.29 показана зависимость фазовой анизотропии от координаты по диаметру покрытия, иллюстрирующая эффект экранирования краем маски.
 |
| Рис.29. Зависимость фазовой анизотропии от координаты по диаметру покрытия при различных диаметрах покрытия d. |