Универсальный двигатель
Универсальный двигатель — вращающийся электродвигатель, который может работать при питании от сети как постоянного, так и однофазного переменного тока [1].
Конструкция универсального электродвигателя
Конструкция универсального коллекторного электродвигателя не имеет принципиальных отличий от конструкции коллекторного электродвигателя постоянного тока с обмотками возбуждения, за исключением того, что вся магнитная система (и статор, и ротор) выполняется шихтованной и обмотка возбуждения делается секционированной. Шихтованная конструкция и статора, и ротора обусловлена тем, что при работе на переменном токе их пронизывают переменные магнитные потоки, вызывая значительные магнитные потери.
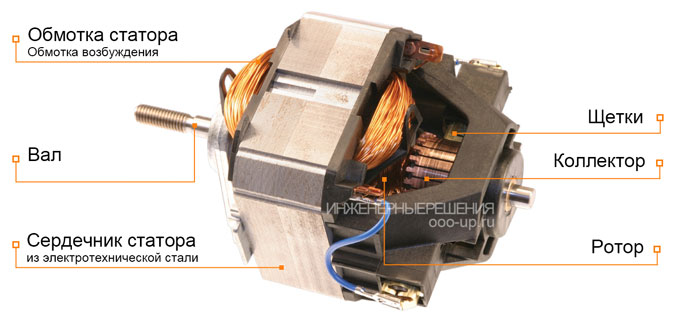
Универсальный двигатель
Секционирование обмотки возбуждения вызвано необходимостью изменения числа витков обмотки возбуждения с целью сближения рабочих характеристик при работе электродвигателя от сетей постоянного и переменного тока [2].
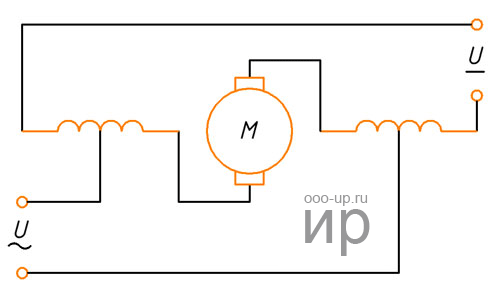
Схема универсального коллекторного двигателя
Универсальный коллекторный электродвигатель может быть выполнен как с последовательным, так и с параллельным и независимым возбуждением.
В настоящее время универсальные коллекторные электродвигатели выполняют только с последовательным возбуждением .

Таким образом, результирующий электромагнитный момент при работе двигателя от сети переменного тока пульсирует. Пульсации электромагнитного момента практически не нарушают работу двигателя. Объясняется это тем, что при значительной частоте пульсаций электромагнитного момента () и большом моменте инерции якоря вращение последнего оказывается равномерным.
Управление универсальным электродвигателем
-
Способы подключения универсального электродвигателя к сети питания:
- прямое подключение к сети питания
- подключение через автотрансформатор
- подключение через регулятор
- симисторный
- транзисторный
Особенности универсального двигателя
Коэффициент полезного действия универсального двигателя при его работе от сети переменного тока более низкий, чем при его работе от сети постоянного тока. Другой недостаток универсального двигателя — тяжелые условия коммутации, вызывающие интенсивное искрение на коллекторе при включении двигателя в сеть переменного тока. Этот недостаток объясняется наличием трансформаторной связи между обмотками возбуждения и якоря, что ведет к наведению в коммутируемых секциях трансформаторной ЭДС, ухудшающей процесс коммутации в двигателе.
Наличие щеточно-коллекторного узла является причиной ряда недостатков универсальных коллекторных двигателей, особенно при их работе на переменном токе (искрение на коллекторе, радиопомехи, повышенный шум, невысокая надежность). Однако эти двигатели по сравнению с асинхронными и синхронными при частоте питающего напряжения f = 50 Гц позволяют получать частоту вращения до 10 000 об/мин и более (наибольшая синхронная частота вращения при f = 50 Гц равна 3000 об/мин) [3].
Области использования
Благодаря тому, что универсальный двигатель может иметь высокую скорость вращения при работе от однофазной сети переменного тока без использования дополнительных преобразовательных устройств, он получил широкое применение в таких домашних приборах как пылесосы, блендеры, фены и др. Так же универсальный электродвигатель широко используется в таких инструментах, как дрели и шуруповерты.
Благодаря тому, что скорость вращения универсального двигателя легко регулируется изменением величины питающего напряжения ранее он широко использовался в стиральных машинах. Сейчас благодаря развитию преобразовательной техники более широкое использование получают бесщеточные электродвигатели (СДПМ, АДКР) скорость вращения которых регулируется изменением частоты напряжения питания.
Что характерно для универсального асинхронного двигателя
Requested virtual server does not exist or temporarily unavailable.
Возможные причины ошибки:
Possible causes of error :-
Сервер, на котором размещён данный ресурс перегружен;
The server is overloaded;
The virtual server has been incorrectly configured;
Service for requested resource is suspended;Свяжитесь с нами для получения подробной информации. Контакты
Contact us for more information. Our contactsАсинхронный двигатель
Если поместить во вращающееся магнитное поле короткозамкнутую медную или алюминиевую рамку на валу электродвигателя, то она вместе с валом придет во вращение по направлению вращения поля. Явление это объясняется следующим образом. Пусть угловая скорость вращения рамки n несколько меньше угловой скорости вращения поля no (асинхронное вращение). В этом случае рамка «проскальзывает» относительно поля. Величину s = (no-n)/no называют скольжением. Относительно магнитного поля рамка вращается с угловой скоростью, пропорциональной скольжению. Поэтому в ней возникает индукционный ток, пропорциональный относительной скорости вращения рамки, т. е. скольжению. По закону Ленца, индуцированный ток взаимодействует с полем так, что рамка увлекается полем.
А так как магнитное поле вращается, то это приводит к вращению рамки. Вращающий момент, действующий на рамку, пропорционален индуцированному току и тем самым скольжению. Этот вращающий момент уравновешивается внешней нагрузкой. Таким образом, в установке данного типа рамка всегда вращается несколько медленнее вращения поля. Такое вращение называют асинхронным (т. е. неодновременным, несогласованным). Сам двигатель получил название асинхронного.
Дополнительно по теме
- Активные и индуктивные сопротивления обмоток
- Расчет магнитной цепи
- Основные уравнения, схемы замещения и векторная диаграмма
- Основные энергетические соотношения и механическая характеристика
- Потери и КПД
- Круговая диаграмма, рабочие характеристики
- Определение главных размеров двигателей
Асинхронный двигатель наиболее распространен в качестве электропривода различных механизмов благодаря своей простоте и надежности. . Их применяют для привода машин и механизмов, не требующих строго постоянной частоты вращения и ее регулировки. Важнейшими достоинствами данного двигателя являются простота его устройства и большая надежность, вызванная отсутствием скользящих контактов. Двигатель имеет достаточный пусковой момент, легко реверсируется (т. е. в нем легко меняется направление вращения ротора). В результате этого асинхронные двигатели являются самыми распространенными в технике электрическими машинами. Более 60 % всей вырабатываемой в мире энергии преобразуется в механическую, в основном, с помощью асинхронных двигателей. Мощность двигателей колеблется от десятков ватт до сотен киловатт.
Асинхронный двигатель изготавливается в однофазном, двухфазном и трехфазном исполнении.
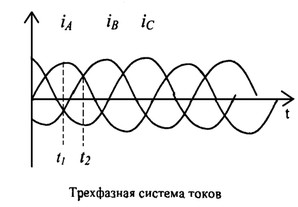
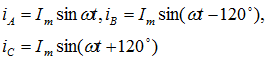
Рассмотрим вращающееся поле переменного тока трехфазной цепи короткозамкнутого асинхронного двигателя с тремя обмотками, сдвинутыми по окружности на 120° и соединенными звездой .
Обмотки статора питаются симметричным трехфазным напряжением. Начальную фазу тока в обмотке А-х принимаем равной нулю. Тогда:
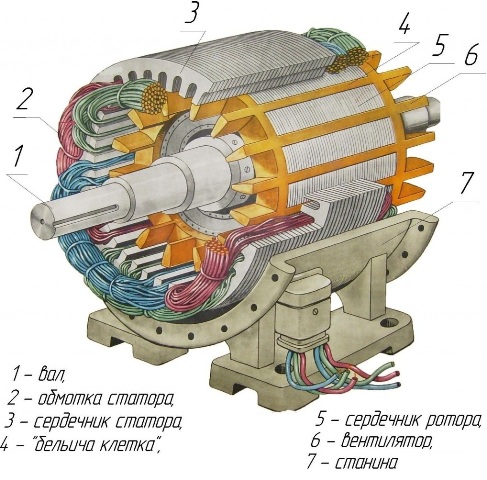
Асинхронный двигатель состоит из статора и ротора. Статор представляет собой литой корпус (стальной или чугунный) цилиндрической формы. Внутри статора располагается магнитопровод с вырубленными пазами, в которые укладывается статорная обмотка. Концы обмоток выводятся в клеммную коробку и могут быть соединены как треугольником, так и звездой. Корпус статора с торцов закрыт подшипниковыми щитами, в которые запрессовываются подшипники вала ротора. Ротор состоит из стального вала с напрессованным на него магнитопроводом.
По конструкции роторов двигатели делятся на две группы. Первая — с короткозамкнутым ротором и вторая — с фазным. У двигателя с короткозамкнутым ротором в пазы заливаются алюминиевые стержни и накоротко замыкаются по торцам. У фазового ротора имеются три обмотки, соединенные в звезду. Выводы обмоток присоединены к кольцам, закрепленным на валу. К кольцам при пуске прижимаются неподвижные щетки, к которым подключаются сопротивления. В начальный момент пуска ротор находится в заторможенном состоянии, затем сопротивление уменьшается и двигатель плавно запускается, что позволяет снизить пусковой ток.
К обмоткам статора подводится трехфазное напряжение, а ротор вращается посредством вращающегося магнитного поля, создаваемого системой трехфазного тока.
В момент времени t1: . Если ток фазы А положителен, т.е. течет от начала к концу, то, пользуясь правилом правоходового винта, можно найти картину распределения магнитного поля для времени t1.
В момент времени t2 вектор результирующей магнитной индукции Вm развернется на угол a1 и далее по часовой стрелке с периодом обращения 360°. Для данного примера угол a1 = 60°.
Таким образом, магнитная индукция представляет собой вращающееся поле с амплитудой


За период поле делает один оборот, , (где f = 50 Гц), и является промышленной частотой питающего переменного напряжения и тока.
При синусоидальном характере вращающегося поля его скорость no равна отношению af/p (где р — число пар полюсов). В рассматриваемом примере р = 1 и частота вращения равна соответственно 3000 оборотам в минуту. Если число катушек в каждой фазе увеличить в два раза, а сдвиг фаз между токами сохранить 120°, то частота вращения уменьшится в два раза за счет увеличения числа пар полюсов. Особенностью короткозамкнутого асинхронного двигателя является наличие постоянной частоты вращения поля статора, определяемой числом пар полюсов.
Если поменять местами любые две фазы, то возникнет поле обратной последовательности и ротор начнет вращаться в другую сторону. Еще одной особенностью асинхронных двигателей является разность частоты вращения полей статора no и ротора n, что делает возможным их электромагнитное взаимодействие. При этом поле ротора будет как бы скользить относительно поля статора

где s — скольжение, при номинальной мощности двигателя скольжение составляет 0,01-0,03.
Основное вращающееся магнитное поле индуцирует в обмотках статора и ротора ЭДС, аналогично трансформатору, так как при разомкнутом роторе асинхронный двигатель представляет собой трансформатор в режиме холостого хода:

где индекс 1 относится к параметрам статора, а 2 — к параметрам ротора; Кобм — обмоточные коэффициенты, определяемые способом укладки обмоток (петлевая или волновая). Кобм=0,92-0,98; Е2s=E2S; Е2 — действующее значение ЭДС неподвижного ротора при s = 1; f2=f1S.
В асинхронном двигателе кроме основного магнитного потока создаются потоки рассеяния. Один охватывает проводники статора, другой — ротора. Потоки рассеяния характеризуются соответствующими индуктивными сопротивлениями Х1 и Х2s.
Уравнения электрического состояния фаз обмоток статора и ротора:

Момент асинхронного двигателя
Вращающий электромагнитный момент двигателя в соответствии с законом электромагнитных сил

См — конструктивная постоянная;
j2s- фазовый сдвиг между током и магнитным потоком.
Отношение максимального момента Мmax к номинальному Мн определяет перегрузочную способность двигателя и составляет 2,0-2,2 (дается в каталожных данных). Максимальный момент соответствует критическому скольжению sк, определяемому активными и индуктивными сопротивлениями двигателя, и пропорционален активному сопротивлению цепи ротора.
Потери в асинхронном двигателе
Потери делятся на потери в статоре и в роторе. Потери в статоре состоят из электрических потерь в обмотке Рэ1 и потерь в стали Рст, а потери в роторе — из электрических Рэ2 и механических Рмех плюс добавочные потери на трение и вентиляцию Рдоб.
где К = 2,9-3,6 определяется диаметром статора D1.
Потери в стали в рабочем режиме во много раз меньше электрических потерь в роторе и ими обычно пренебрегают.
КПД асинхронного двигателя составляет от 0,75 до 0,95.
Рабочий момент двигателя пропорционален квадрату напряжения, что необходимо учитывать при включении двигателя в протяженных распределительных сетях. Номинальному моменту соответствует номинальное скольжение, а пусковому — sп.
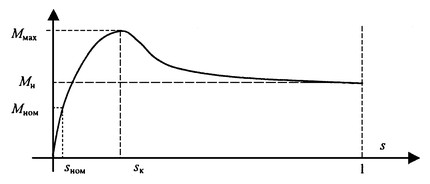
Зависимость момента двигателя от скольжения М=f(s) приведена на рисунке.
На участке от 0 до Мmax двигатель работает в устойчивом режиме, а участок от Sk называется режимом опрокидывания двигателя, при котором двигатель в результате перегрузки останавливается и не может вернуться в рабочий режим без очередного запуска. Пусковые свойства двигателя определяются соотношением пускового момента Мп и номинального. В соответствии с каталожными данными оно составляет 1,6-1,7. При пуске асинхронного двигателя cosj очень мал и пусковой ток в обмотке статора может возрастать в 5-7 раз по сравнению с номинальным. Ограничение его осуществляется изменением частоты питающего напряжения для двигателя с короткозамкнутым ротором и увеличением активного сопротивления в цепи ротора для двигателя с фазовым ротором. Для механизмов, имеющих тяжелые условия пуска, где желательно использовать асинхронный двигатель с короткозамкнутым ротором, применяются двигатели с улучшенными пусковыми свойствами: с большим пусковым моментом и меньшим пусковым током, чем у двигателей общего назначения.
Механическая характеристика асинхронного двигателя
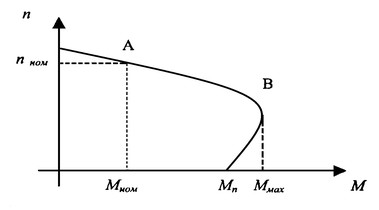
Зависимость скорости вращения от нагрузки на валу двигателя называется механической характеристикой асинхронного двигателя.
Участок АВ механической характеристики соответствует устойчивому режиму работы асинхронного двигателя. Увеличение нагрузки (тормозного момента) ведет к некоторому снижению частоты вращения ротора, что вызывает увеличение вращающего момента. При превышении тормозным моментом критического, двигатель останавливается. Точка В на графике соответствует точке критического или опрокидывающего момента.
Регулирование частоты вращения
Регулирование частоты вращения может быть осуществлено тремя способами: изменением частоты питающего напряжения, переключением числа пар полюсов и изменением скольжения.
Для регулирования частоты вращения двигателей с короткозамкнутым ротором в настоящее время широко используются частотные преобразователи с микропроцессорным управлением.
Тормозные режимы возникают в машине при определенных условиях или создаются искусственно с целью ускорения процесса остановки двигателя. Торможение может быть:
- генераторное с отдачей энергии в сеть;
- противовключением;
- динамическое.
Генераторным тормозным режимом называется режим работы двигателя, когда под действием внешнего момента ротор двигателя вращается в том же направлении, что и магнитное поле, но с большей скоростью.
Тормозной режим противовключения возникает в том случае, когда под действием внешнего момента, приложенного к валу двигателя, ротор вращается в противоположную сторону относительно вращающегося магнитного поля.
Динамический тормозной режим получается при отключении обмотки статора от сети трехфазного тока и подключении ее на время торможения к источнику энергии постоянного тока.
Расчетные формулы для выбора двигателя имеют вид:

Выбор двигателя по каталогу осуществляется следующим образом. По заданному моменту рабочего механизма и частоте вращения определяется необходимая мощность. После этого определяются условия окружающей среды, выбирается исполнение по типу монтажа и высоте оси рабочего вала двигателя. Зная эти параметры, по каталогу проверяют необходимую перегрузочную способность, КПД, массу и момент инерции.
Для шахтных условий используются двигатели взрывозащищенного исполнения; для крановых механизмов — двигатели с повышенным скольжением и т.д.
В бытовых приборах используются однофазные двигатели. Однофазный двигатель отличается от трехфазного тем, что его статорная обмотка подключается к однофазному источнику питания. Ротор выполняется короткозамкнутым. На статоре размещаются две обмотки, оси которых смещены друг относительно друга на 90 электрических градусов. Одна называется рабочей, а другая -пусковой.
Рабочие характеристики асинхронного двигателя
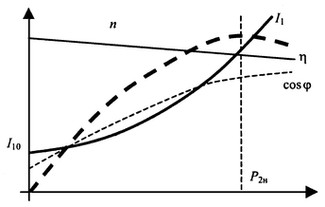
Рабочими характеристиками асинхронного двигателя являются зависимости от мощности на валу Р2 таких параметров, как момент, частота вращения, ток статора, КПД и cosj.Анализ характеристик показывает, что частота вращения ротора падает с увеличением нагрузки, а момент пропорционален ей. Ток статора изменяется по нелинейному закону, что связано с магнитной системой двигателя и при Р2=0 определяется током холостого хода, составляющего до 40% его номинального значения.
В системах управления используются двигатели, в которых одна из обмоток статора постоянно подключена к сети переменного тока (обмотка возбуждения), а ко второй (обмотка управления) подводится напряжение управления. Такие двигатели относятся к классу микромашин.
Микромашины используются в информационных системах, где они выполняют функции первичных преобразователей для вычислительных операций в системах автоматики и телемеханики.
Одним из примеров является сельсин, предназначенный для передачи на расстояние угловых перемещений валов, механически не связанных друг с другом. По конструкции сельсины делятся на контактные и бесконтактные. Контактные сельсины выполняются в двух вариантах. В одном обмотка возбуждения располагается на роторе, а трехфазная обмотка, называемая обмоткой синхронизации, в пазах статора. В другом варианте наоборот. При включении обмотки возбуждения сельсина на однофазное напряжение ток создает пульсирующее магнитное поле, которое индуцирует в каждой фазе обмотки синхронизации переменную ЭДС. Действующее значение ЭДС каждой фазы зависит от расположения осей этих фаз относительно оси потока возбуждения.
В простейшем случае схема дистанционной передачи угловых перемещений состоит из двух одинаковых сельсинов, у которых одноименные зажимы обмоток синхронизации соединены проводами линии связи, а на обмотки возбуждения подается напряжение сети. Один из сельсинов называют сельсин-датчиком, другой — сельсин-приемником.
Дополнительно по теме
- Активные и индуктивные сопротивления обмоток
- Расчет магнитной цепи
- Основные уравнения, схемы замещения и векторная диаграмма
- Основные энергетические соотношения и механическая характеристика
- Потери и КПД
- Круговая диаграмма, рабочие характеристики
- Определение главных размеров двигателей
Типы асинхронных двигателей, разновидности, какие бывают двигатели
Электродвигатели переменного тока, использующие для своей работы вращающееся магнитное поле статора, являются в настоящее время весьма распространенными электрическими машинами. Те из них, у которых частота вращения ротора отличается от частоты вращения магнитного поля статора, называются асинхронными двигателями .

В связи с большими мощностями энергетических систем и большой протяженностью электрических сетей энергоснабжение потребителей всегда осуществляется на переменном токе. Поэтому естественно стремление к максимальному использованию электрических двигателей переменного тока. Это, казалось бы, освобождает от необходимости многократного преобразования энергии.
К сожалению, двигатели переменного тока по своим свойствам, и прежде всего по управляемости, существенно уступают двигателям постоянного тока, поэтому они используются преимущественно в установках, где не требуется регулирование скорости.
Относительно недавно начали активно использоваться регулируемые системы переменного тока с подключением электродвигателей переменного тока через частотные преобразователи.
Асинхронный электродвигатель с короткозамкнутым ротором представляет собой вращающийся трансформатор, первичная обмотка которого — это статор, а вторичная — ротор. Между статором и ротором находится воздушный зазор. Как и в любом реальном трансформаторе, каждая обмотка имеет также и собственное активное сопротивление.
При подключении двигателя в электрическую сеть в статоре возникает магнитное поле, которое вращается синхронно с частотой питающей сети. За счет явления электромагнитной индукции под действием магнитного поля статора в электрически замкнутых обмотках ротора возникает электрический ток.
Наведенный электрический ток ротора создаст собственное магнитное поле, которое вступает во взаимодействие с вращающимся магнитным полем статора. В результате ротор начинает вращаться, и на валу двигателя возникает механический момент, пропорциональный току статора.

Модель трехфазного асинхронного двигателя в разрезе
Характерной особенностью асинхронного двигателя является то, что за счет взаимодействия полей статора и ротора скорость вращения вала двигателя несколько меньше, чем частота питающей сети. Разность между частотой питающей сети и скоростью вращения называют скольжением.
Очень широко применяются в различных отраслях хозяйства и производства асинхронные двигатели в силу простоты их изготовления и высокой надежности. Между тем, можно выделить четыре основных типа асинхронных двигателей:
- однофазный асинхронный двигатель с короткозамкнутым ротором;
- двухфазный асинхронный двигатель с короткозамкнутым ротором;
- трехфазный асинхронный двигатель с короткозамкнутым ротором;
- трехфазный асинхронный двигатель с фазным ротором.

Однофазный асинхронный двигатель содержит на статоре лишь одну рабочую обмотку, на которую в процессе работы двигателя подается переменный ток. Но для пуска двигателя на его статоре есть и дополнительная обмотка, которая кратковременно подключается к сети через конденсатор или индуктивность, либо замыкается накоротко. Это необходимо для создания начального сдвига фаз, чтобы ротор начал вращаться, иначе пульсирующее магнитное поле статора не столкнуло бы ротор с места.
Ротор такого двигателя, как и любого другого асинхронного двигателя с короткозамкнутым ротором, представляет собой цилиндрический сердечник с залитыми алюминием пазами, с одновременно отлитыми вентиляционными лопастями. Такой ротор, типа «беличья клетка» и называется короткозамкнутым ротором. Однофазные двигатели применяются в маломощных приборах, таких как комнатные вентиляторы или небольшие насосы.

Двухфазные асинхронные двигатели наиболее эффективны при работе от однофазной сети переменного тока. Они содержат на статоре две рабочие обмотки, расположенные перпендикулярно, причем одна из обмоток подключается к сети переменного тока напрямую, а вторая – через фазосдвигающий конденсатор, так получается вращающееся магнитное поле, а без конденсатора ротор бы сам не сдвинулся с места.
Эти двигатели также имеют короткозамкнутый ротор, а их применение гораздо шире, чем у однофазных. Здесь уже и стиральные машины, и различные станки. Двухфазные двигатели для питания от однофазных сетей называют конденсаторными двигателями, так как фазосдвигающий конденсатор является зачастую неотъемлемой их частью.

Трехфазный асинхронный двигатель содержит на статоре три рабочие обмотки, сдвинутые относительно друг друга так, что при включении в трехфазную сеть, их магнитные поля получаются смещенными в пространстве относительно друг друга на 120 градусов. При подключении трехфазного двигателя к трехфазной сети переменного тока, возникает вращающееся магнитное поле, приводящее в движение короткозамкнутый ротор.
Обмотки статора трехфазного двигателя можно соединить по схеме «звезда» или «треугольник», причем для питания двигателя по схеме «звезда» требуется напряжение выше, чем для схемы «треугольник», и на двигателе, поэтому, указываются два напряжения, например: 127/220 или 220/380. Трехфазные двигатели незаменимы для приведения в действие различных станков, лебедок, циркулярных пил, подъемных кранов, и т.д.

Трехфазный асинхронный двигатель с фазным ротором имеет статор аналогичный описанным выше типам двигателей, — шихтованный магнитопровод с тремя уложенными в его пазы обмотками, однако в фазный ротор не залиты алюминиевые стержни, а уложена уже полноценная трехфазная обмотка, в соединении «звезда». Концы звезды обмотки фазного ротора выведены на три контактных кольца, насаженных на вал ротора, и электрически изолированных от него.
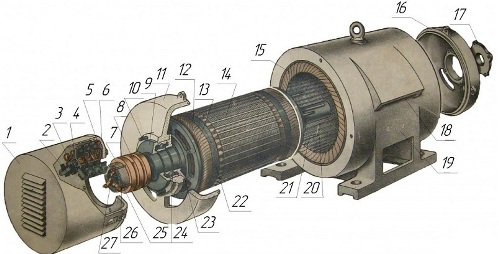
1 — кожух с жалюзями, 2 — щетки, 3 — щеточная траверса со щеткодержателями, 4 — палец крепления щеточных траверс, 5 — выводы от щеток, 6 — колодка, 7 — изоляционная втулка, 8 — контактные кольца, 9 — наружная крышка подшипника, 10 — шпилька крепления коробки и крышек подшипника, 11 — задний подшипниковый щит, 12 — обмотка ротора, 13 — обмоткодержатель, 14 — сердечник ротора, 15 — обмотка ротора, 16 — передний подшипниковый щит, 7 — наружная крышка подшипника, 18 — вентиляционные отверстия, 19 — станина, 20 — сердечник статора, 21 — шпильки внутренней крышки подшипника, 22 — бандаж, 23 — внутренняя крышка подшипника, 21 — подшипник, 25 — вал, 26 — контактные кольца, 27 — выводы обмотки ротора
Посредством щеток, на кольца также подается трехфазное переменное напряжение, и подключение может быть осуществлено как напрямую, так и через реостаты. Безусловно, двигатели с фазным ротором стоят дороже, но их пусковой момент под нагрузкой значительно выше, чем у типов двигателей с короткозамкнутым ротором. Именно в силу повышенной мощности и большого пускового момента, этот тип двигателей нашел применение в приводах лифтов и подъемных кранов, то есть там, где устройство запускается под нагрузкой, а не вхолостую.
Подробнее про этот тип двигателей читайте здесь: Асинхронные электродвигатели с фазным ротором
Телеграмм канал для тех, кто каждый день хочет узнавать новое и интересное: Школа для электрика