§ 40. РАДИОЛОКАЦИОННЫЕ СТАНЦИИ
Существующие радиолокационные станции (РЛС) дают возможность определять расстояния до наблюдаемых на экране индикатора кругового обзора (ИКО) ориентиров, курсовые углы или пеленги. Полученные наблюдения (величины расстояний, курсовых углов или пеленгов) используют для определения места судна. При этом с помощью РЛС могут быть более точно измерены расстояния, чем пеленги. Поэтому точность полученного обсервованного места будет больше при определении его по трем или двум расстояниям, чем по трем или двум пеленгам. Кроме того, точность обсервованного места будет выше, если оно получено по точечным ориентирам. К точечным относятся специальные ориентиры — знаки с активными и пассивными радиолокационными отражателями, а также надводные скалы, небольшие, с отвесными берегами, островки. К объемным относятся вершины гор, мысы, скалистые выступы берега, острова и др.
Точность определения места и обеспечение безопасности плавания зависят также от натренированности судоводителя и его умения опознавать местность по ее радиолокационному изображению. Каждый облучаемый на местности объект виден на экране РЛС в виде светлого пятна или полосы эхо-сигнала, отличающихся по величине, форме и яркости. На экране РЛС просматриваются только склоны возвышенных берегов, а более низкие их части, расположенные за ними, попадают в зону радиолокационной тени. Обрывистые берега, надводные скалы дают более яркие и четкие эхо-сигналы, воспроизводя свою форму и контуры. Растительность, покрывающая берега, дает пятнистый, а ровный берег, покрытый лесом, — яркий эхо-сигнал. Низкие песчаные берега, пляжи обнаруживаются на экране РЛС только на близком расстоянии.
Волноломы, причальные стенки дают хорошо видимый эхо-сигнал в соответствии с их контурами.
Спокойная вода не дает, а волны — дают эхо-сигналы, беспорядочно располагающиеся по экрану в радиусе, зависящем от высоты волны.
Определение места судна может производиться по трем и более, а также по двум и одному ориентиру, но эти ориентиры обязательно должны быть нанесены на карте.
Расстояния до опознанных на экране ИКО точечных или характерных точек объемных ориентиров измеряют с помощью подвижного или неподвижного колец дальности. В последнем случае для большей точности можно на визир прикреплять масштабную линейку.
При этом следует учитывать, что при движении судна величина изменения расстояния будет больше для ориентиров, расположенных под острыми углами к диаметральной плоскости судна, чем близких к 90°. Поэтому первыми должны измеряться расстояния до ориентиров, находящихся ближе к траверзу, а затем расположенных по носу или по корме.
Отсчет курсового угла производится при ориентировке изображения относительно диаметральной плоскости (по курсу) по неподвижной шкале, в момент прохождения светящейся круговой развертки через ориентир. Одновременно с этим записывают компасный курс судна.
Для получения пеленга используют формулу ИП = КК + АК + + КУ, соблюдая для А/С и КУ правила знаков.
Если РЛС работает совместно с гирокомпасом и изображения ориентированы по норду, то по неподвижной шкале на ИКО снимается сразу КП, который исправляют поправкой компаса и получают ИП (курсовые углы при этом снимаются по подвижной шкале).
Определение места судна с помощью РЛС
Место судна с помощью РЛС определяют по двум, трем расстояниям, пеленгу и расстоянию, крюйс-расстоянию. При этом расстояния должны быть измерены до точечных ориентиров.
Определение места судна по двум, трем расстояниям и по пеленгу и расстоянию с помощью РЛС аналогично способам, изложенным в § 29 и 31.
Определение по крюйс-расстоянию. Этот способ применяется в случаях, когда имеется только один опознанный ориентир М и нет уверенности в достоверности поправки компаса. Вначале измеряют расстояние D1 (рис. 102) до ориентира М и замечают время и отсчет лага. Через некоторый промежуток времени измеряют расстояние D2 до того же ориентира и замечают время и отсчет лага. Затем из ориентира М на карте как центра радиусами D1 и D2 проводят дуги и линию, параллельную линии курса, по направлению движения судна. На этой линии откладывают рол (отрезок MB) за время измерения расстояний, и из полученной точки В радиусом, равным D1 делают засечку на дуге радиуса D2. Точка Р пересечения двух дуг даст счислимо-обсервованное место судна.
При отсутствии точечных ориентиров можно приближенно определять место судна по объемным ориентирам.
Определение по трем и более расстояниям. По трем и более расстояниям до объемных ориентиров можно приближенно определить место судна, применяя прием вмещения ориентирных расстояний.
Получив с помощью РЛС, например, три курсовых угла и три расстояния до каких-то трех береговых точек, берут кальку, наносят на нее линию пути судна АА’ (рис. 103) и выбирают на этой линии произвольную точку О. В точке О строят по транспортиру курсовые углы и проводят внешние линии этих углов Оа, Ob, Ос. По каждой из линий откладывают измеренные расстояния D1 D2 , D3. После этого накладывают кальку на карту и, перемещая ее вдоль нанесенной на карте линии пути судна или параллельно ей около счислимого места С, находят такое положение кальки, чтобы концы линий Оа, Оb, Ос одновременно касались характерных выступов береговой черты. Точка О даст обсервованное место судна, но ей особо доверяться нельзя.

Рис. 102
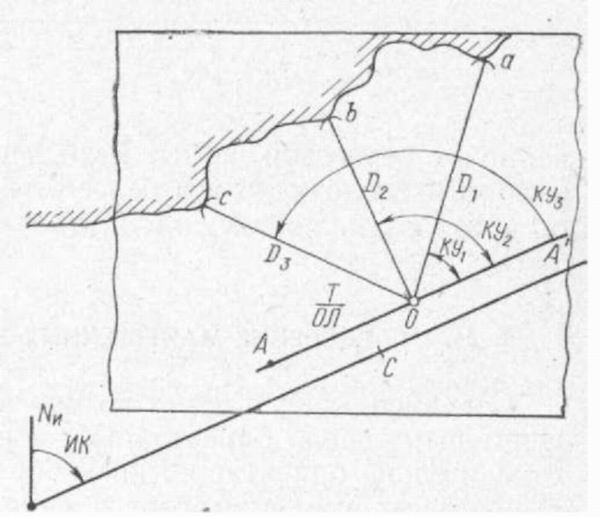
Рис. 103
Если скорость судна больше 12 узлов, то следует на кальке внешние линии второго и третьего курсовых углов проводить не из точки О, а из других точек, расположенных на линии АА’ , с учетом пройденного судном расстояния за промежутки времени, затраченные на измерение соответствующего курсового угла и расстояния.
При следовании судна вдоль побережья с малоизрезанной береговой чертой измеряют расстояния до береговой черты на одинаковых курсовых углах через равные промежутки времени, замечая при этом отсчеты лага. На кальке проводят линию АА1 (рис. 104) и через равные пройденные расстояния AS = vt (где v — скорость судна, t — промежуток времени, через который производились измерения) через точки О, O1 O2 и т. д. проводят линии, соответствующие курсовому углу, и откладывают на них величины измеренных расстояний D1 D2 D3 и т. д. Затем кальку накладывают на карту в районе счислимого места судна и перемещают, удерживая линию АА1 на кальке параллельно линии пути судна, нанесенной на карте, до тех пор, пока концы отрезков на кальке не совпадут с береговой линией на карте.

Рис. 104
Обсервованное место получают в точке последнего измеренного расстояния и записывают около него соответствующий момент времени и отсчет лага (Е/ол). Используя данные методы, необходимо помнить, что отраженные сигналы, изображение которых видно на ИК0 , могут быть получены не непосредственно от береговой черты, находящейся у уреза воды, а от более высоко расположенных и более отвесных участков берега, удаленных от уреза воды, поэтому полагаться на точность определения не следует.
Где же она?
Точка, в которой находится в данный момент цель, в нашей станции определяется дальностью до цели и двумя углами — углом места и азимутом. Азимут — угол в горизонтальной плоскости, отсчитываемый от направления на север (термин заимствован, вероятно, у путешественников и туристов). Угол места — угол в вертикальной плоскости, отсчитываемый от горизонтальной плоскости (термин, по-видимому, придумали специально для радиолокации). Угол места и азимут (точнее, пересечение плоскостей, которые они определяют) дают нам прямую линию, на которой расположена цель, а дальность указывает, где именно на этой прямой находится цель. Значит, точно измерить угловые координаты и дальность.
Начнем с измерения дальности.
Станция включилась в работу. Сигнал срывается с передающей антенны и со скоростью света устремляется к цели. Одновременно на экране индикатора световой луч развертки начинает свой путь из точки, которая обозначает место расположения станции. Система развертки устроена таким образом, что при отсутствии цели луч будет все время прочерчивать на экране светящуюся горизонтальную линию (но будем все-таки считать, что цель есть). Вот сигнал достиг цели, отразился от нее и, вернувшись к станции, попал на огромное полотнище приемной антенны. И в этот момент луч сделает на экране засечку — цель обнаружена. То же происходит и со всеми последующими сигналами. Если цель приблизится к станции, то сигнал совершит свое путешествие к ней и обратно быстрее, а значит и луч развертки раньше засветит отметку от цели. Так как скорость, с которой путешествует сигнал, постоянна, то время, прошедшее с момента излучения сигнала до его приема, пропорционально удвоенному расстоянию до цели. Поэтому, выбрав подходящий коэффициент пропорциональности, мы можем измерить расстояние на индикаторе, которое успел пробежать луч развертки за это время, непосредственно в километрах или милях. Так мы получаем шкалу дальности на экране индикатора. Теперь нам достаточно заметить цифру, у которой возникает отметка от цели, чтобы сказать, на какой дальности она находится. Но как точно мы можем измерить это расстояние? Чем больше делений на нашей шкале дальности, тем точнее можно произвести отсчет.
Попробуйте измерить длину подмосковного окунишки рулеткой, на которой деления расположены через 25 сантиметров. По-моему, довольно трудно. Значительно легче сделать это, имея под рукой линейку с миллиметровыми делениями. Шкала индикатора в нашем распоряжении, и казалось бы, что точность может быть как угодно высокой. Не тут-то было. Представим себе обычную жизненную ситуацию. Вы приходите на стадион минут за двадцать до начала футбольного матча. Кое-где уже сидят зрители. Вы подходите к своему ряду и не можете найти своего законного места, скажем № 216. Вы видите место № 214, далее восседает мужчина, несколько похожий на Тартарена из Тараскона, а за ним на скамейке виден № 218. Учитывая стремление дирекции стадиона разместить на трибунах как можно больше зрителей и внушительные габариты ранее пришедшего болельщика, Вы с грустью вынуждены констатировать, что сидеть вам придется на ступеньках лестницы. По-моему, сейчас самое подходящее время решить задачу, на каком же месте сидит болельщик.
Теперь Вам должно быть понятно состояние оператора, определяющего дальность до цели, отметка от которой перекрывает сразу несколько делений шкалы.
Поскольку ширина отметки прямо пропорциональна длительности сигнала, то нетрудно понять, что для повышения точности отсчета и станции необходимо использовать более короткие сигналы и тогда отметка от цели станет уже и не перекроет соседних делений. Применение коротких сигналов позволит нам выполнить и третье требование заказчика— обеспечить высокую разрешающую способность станции по дальности. Если две цели расположены таким образом, что отметки от них перекрываются и образуют одну суммарную отметку, то специалисты говорят, что цели не разрешены. Если это не совсем понятно, то посмотрите на рисунок. Представьте себе, что Вы смотрите на футболистов сверху. В ситуации, показанной слева на рисунке, Вы увидите отдельно каждого из футболистов и мяч. Это и означает, что вы «разрешаете» данные цели. А в ситуации, изображенной справа, задача потруднее. Тут не всегда даже можно сказать, сколько Вы видите футболистов, а где находится мяч и вовсе не понятно (не забывайте, что Вы смотрите сверху!). Вы видите лишь группу футболистов.

В этом случае Вы цели «не разрешаете» — они слились для Вас в одну. Теперь понятно, что такое разрешение?
Будем укорачивать сигналы, то есть сужать отметки от них на экране индикатора. Когда ширина отметок станет меньше расстояния между ними, произойдет разрешение целей и каждая из них будет наблюдаться отдельно. Естественно, что заказчик заинтересован в получении станции, которая бы правильно определяла бы и положение, и число целей. Значит, да здравствуют короткие сигналы? Но ведь раньше мы убедились, что нам нужны длинные сигналы. Опять конфликт. Обещаем справиться и с ним. А пока поверьте на слово, что специалисты сумели сделать это. Объяснение запишем себе в долг.
А как определить угол места и азимут цели? Эту миссию выполняет антенна станции, которая обладает направленностью. Что это значит? Антенна принимает только сигналы, приходящие из узкого пространственного конуса. Функция, с помощью которой математики сумели описать это свойство — возможность селектировать цели по угловым координатам, — называется диаграммой направленности антенны. На сигналы от целей, находящихся вне диаграммы направленности, антенна по существу не реагирует. Зная угловые координаты этого конуса, мы тем самым определяем и угловые координаты цели. Если в конус попадают две или три цели, то все они будут иметь одни и те же угловые координаты, то есть, как говорят специалисты, они не разрешены по углам. Значит, нужно уменьшить угловые размеры конуса, иначе говоря, сужать диаграмму направленности. Когда она сузится настолько, что при любом положении в нее будет попадать единственная цель, мы сможем торжественно сообщить заказчику, что добились полного разрешения целей по угловым координатам. Но такая ситуация принципиально невозможна. Во-первых, диаграмма направленности не может быть бесконечно узкой (как будет показано ниже, для этого потребуется бесконечно большая антенна). Ну и кроме того, несколько целей могут оказаться на одном и том же направлении, но на разных дальностях. Тогда мы, может быть, сумеем разрешить их по дальности, но никогда не сможем разрешить их по угловым координатам.
В реальной жизни, однако, никогда не требуют «бесконечно хороших» показателей. Требуют просто хороших. Это значит, что нужно разрешать цели, которые достаточно близко расположены. Что значит «достаточно близко»? А это уже зависит от конкретной задачи. Иногда специалистов удовлетворяют станции, которые разрешают цели с угловыми координатами, отличающимися на минуты или даже градусы, а в некоторых случаях требования к угловой разрешающей способности будут определяться секундами.
При узкой диаграмме направленности угловые координаты каждой цели можно определить точнее. Ведь число возможных неперекрывающихся положений в пространстве у узкого конуса больше, чем у широкого. А это равносильно выбору шкалы отсчета с большим количеством делений. Значит, нужно сужать диаграмму. Как это сделать?
Специалистам хорошо известно, что ширина диаграммы направленности определяется в основном размерами антенны. Чем больше антенна, тем уже ее диаграмма направленности, тем лучше она измеряет угловые координаты целей и разрешает цели по углам. Конечно, длина волны станции при увеличении антенны должна оставаться постоянной. Следовательно, нашему заказчику нужна станция с очень большой антенной. В общем-то, если не считать чисто технических ограничений, ничто не мешает построить радиолокационную станцию с антенной любой величины. Правда, если длина антенны будет измеряться несколькими километрами или десятками километров, то придется учитывать такие факторы, как кривизна Земли, различие температур воздуха на краях антенны и т. д. Но до этого, кажется, дело еще не дошло.
Если бы наша станция была живым человеком, то можно было бы предложить и другой способ. Ширина диаграммы направленности для человека, то есть угол, в котором он может видеть окружающие объекты, не поворачивая головы, в нормальном состоянии равна 140–150 градусам. Если же человек (мужчина, конечно) выпьет сто граммов водки или эквивалентное количество алкогольного напитка любого сорта, то его диаграмма направленности, по официальным данным ГАИ, сузится до 40 градусов. Вот и готовый рецепт сужения диаграммы направленности.
Но мы, кажется, несколько отвлеклись от темы. Извините. Вспомним — речь шла о наблюдении цели только в узком пространственном конусе. А где гарантия, что цели когда-нибудь попадут в него? Нет такой гарантии. Поэтому станция не ждет, пока цели попадут в ее диаграмму направленности, а сама активно ищет их.
Первые образцы радиолокационных станций были смонтированы в автофургонах, причем антенна неподвижно крепилась к крыше фургона. Для поиска целей в пространстве поворачивался весь фургон вместе с антенной и оператором относительно вертикальной оси. Шасси все-таки оставалось неподвижным. При этом пространство просматривалось на все 360 градусов и цели обнаруживались на любом направлении. Чем быстрее вращался фургон, тем чаще пробегал луч по каждому участку неба и тем труднее было цели проскользнуть незамеченной.
Число оборотов станции в минуту или в секунду называют темпом обзора пространства.

Пока самолеты летали со сравнительно малыми скоростями, их надежно обнаруживали и при небольшом темпе обзора. Но самолеты стали летать быстрее. Пока станция разворачивается, они могли пролететь огромное расстояние и незаметно приблизиться к охраняемому объекту. Нужно увеличить темп обзора. Но если вращать фургон быстрее, то ощущение сидящего в нем оператора можно, по-видимому, сравнить только с ощущениями космонавтов, проходящих проверку на центрифуге. Какая уж тут работа, хотя бы сознания не потерять. Поэтому в последующих вариантах станций кабина операторов и все оборудование остается неподвижным, а вращается лишь антенна.
Скорость самолетов увеличилась, появились спутники и ракеты — небольшие цели, двигающиеся с огромными скоростями.
Входят в строй радиолокационные станции с антеннами в несколько десятков метров длиной. Такую антенну не повернешь. И поэтому вместо механического перемещения антенны стали использовать электронное управление диаграммой направленности неподвижной антенны.
Для пояснения принципа такого электронного управления придется снова обратиться к примеру из спортивной жизни. Иначе понять его будет довольно трудно.
Приглашаю Вас в плавательный бассейн. Восемь пловцов, абсолютно равных по силам, должны доплыть до финишной стенки, вылезти из воды и собраться вместе. Встанем у финишной стенки и понаблюдаем. Пловцы, поскольку их силы равны, плывут прямо на нас ровной линией. Направление их движения перпендикулярно финишной стенке. Они одновременно достигнут бортика, вылезут из воды, и в этот момент мы сразу увидим группу из восьми человек. А теперь усложним ситуацию. Предположим (хотя в жизни так и не бывает), что бассейн имеет несколько необычную форму. Стартовая стенка его перпендикулярна боковым, а финишная сильно скошена, так что бассейн имеет не прямоугольную, а трапециевидную форму. Снова пригласим пловцов на старт, а сами снова встанем у финишной стенки. Теперь пловцы двигаются на нас как бы сбоку и линия их движения не перпендикулярна финишной стенке. Вот пловец на самой короткой дорожке уже вылез из бассейна, а остальные еще плывут. Если бассейн таков, что разница во времени между пловцами на соседних дорожках составляет одну секунду, то первый пловец будет ждать на бортике последнего пловца семь секунд, второй — шесть и так далее. И только когда последний пловец появится на бортике, мы сможем собрать их всех вместе.
А теперь снова вернемся к антеннам. Разобьем большую антенну на отдельные элементы, которые, по существу, представляют собой небольшие самостоятельные антенны. Если радиосигналы приходят с направления, перпендикулярного антенне, то они поступают на все элементы одновременно (бассейн правильной формы). Такие сигналы можно складывать и подавать на последующие каскады приемника. Если же сигналы приходят с других направлений, то они достигают элементов антенны неодновременно. Для того чтобы их можно было сложить, надо задержать ранее пришедшие сигналы до момента поступления сигнала с последнего элемента антенны (трапециевидный бассейн). Эту задержку выполняют специальные электронные устройства, называемые линиями задержки. Таким образом, для каждого элемента антенны необходима своя линия задержки. Чем сильнее отличается направление, откуда приходит радиоволна, от перпендикуляра к антенне, тем больше задержка сигналов, поступающих на соседние элементы антенны. Изменяя значение времени задержки, мы изменяем направление, в котором «смотрит» антенна. Сигналы, приходящие с этого направления, после антенны будут суммироваться, а сигналы с других направлений суммироваться не будут, так как для них значения задержек не соответствуют разности времени появления сигналов на отдельных элементах.
Наконец, последний вопрос, который может возникнут Зачем нужно складывать сигналы от отдельных элементов антенны? Во-первых, именно сложение сигналов с разными задержками и обеспечивает направленность и возможность изменять направление наблюдения. А во-вторых, суммарный сигнал становится мощнее и его легче принимать и обрабатывать.
Пока что мы говорили о приемной антенне, но точно по такому же принципу работает и передающая антенна с электронным управлением диаграммой направленности. Установив то или иное значение задержки для отдельных излучающих элементов, мы тем самым посылаем суммарный сигнал всей сложной системы в заданном направлении. Сложная электронная система по заранее выбранному закону изменяет задержки во всех элементах системы, и луч радиолокатора обшаривает пространство в поисках цели. Вот как работает неподвижная антенна с электронным управлением диаграммой направленности.
Хотя с помощью одной антенны нельзя осуществить круговой обзор, все же большой сектор пространства находится под непрерывным наблюдением. Если нужен круговой обзор, то придется строить несколько станций, направленных в разные стороны. Темп обзора в этом случае зависит от того, сколько раз в секунду станция может просмотреть свой сектор. Заказчик хочет, чтобы темп обзора был высоким? Ну что же, если выделены соответствующие средства и приложены соответствующие усилия, то в большинстве случаев это требование удовлетворить удается.
Подведем некоторые итоги. Мы знаем, как можно выполнить примерно половину требований заказчика. Но за нами остался долг — неразрешенный конфликт между остальными требованиями. Для выхода из любой конфликтной ситуации всегда можно найти компромиссное решение. Об этом и пойдет речь в следующей главе, в которой мы узнаем…
RU2307375C1 — Способ измерения угла места низколетящей цели и радиолокационная станция для его реализации — Google Patents
Publication number RU2307375C1 RU2307375C1 RU2006114640/09A RU2006114640A RU2307375C1 RU 2307375 C1 RU2307375 C1 RU 2307375C1 RU 2006114640/09 A RU2006114640/09 A RU 2006114640/09A RU 2006114640 A RU2006114640 A RU 2006114640A RU 2307375 C1 RU2307375 C1 RU 2307375C1 Authority RU Russia Prior art keywords nlc elevation angle radar output antenna Prior art date 2006-04-28 Application number RU2006114640/09A Other languages English ( en ) Inventor Сергей Яковлевич Прудников (RU) Сергей Яковлевич Прудников Анатолий Александрович Титов (RU) Анатолий Александрович Титов ков Валентин Иванович Кисл (RU) Валентин Иванович Кисляков Сергей Назарович Лужных (RU) Сергей Назарович Лужных Original Assignee Открытое акционерное общество «Научно-исследовательский институт измерительных приборов» (ОАО «НИИИП») Priority date (The priority date is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the date listed.) 2006-04-28 Filing date 2006-04-28 Publication date 2007-09-27 2006-04-28 Application filed by Открытое акционерное общество «Научно-исследовательский институт измерительных приборов» (ОАО «НИИИП») filed Critical Открытое акционерное общество «Научно-исследовательский институт измерительных приборов» (ОАО «НИИИП») 2006-04-28 Priority to RU2006114640/09A priority Critical patent/RU2307375C1/ru 2007-09-27 Application granted granted Critical 2007-09-27 Publication of RU2307375C1 publication Critical patent/RU2307375C1/ru
Links
Images







Abstract
Изобретения относятся к области радиолокации и могут быть использованы для измерения угла места низколетящих целей (НЛЦ). Техническим результатом является уменьшение ошибок при измерении угла места низколетящей цели. Технический результат достигают за счет того, что предварительно с помощью дополнительных радиолокационных, оптических или других средств измеряют угол места НЛЦ ε0, затем измеряют дальность до НЛЦ R0, соответствующую измеренному углу места ε0, после чего при дальнейшем движении НЛЦ измеряют дальность до НЛЦ Ri и определяют угол места НЛЦ εi по формуле:

где i — номер измерения дальности до НЛЦ Ri и вычисления угла места НЛЦ εi;
rз=6371 км — радиус Земли;
ha — высота антенны РЛС. 2 н. и 2 з.п. ф-лы, 8 ил.
Description
Изобретения относятся к области радиолокации и могут быть использованы для измерения угла места низколетящих целей (НЛЦ).
Определим понятие низколетящей цели.
Известно (Теоретические основы радиолокации. Под ред. В.Е.Дулевича, М.: Сов. радио, 1964, с.155-157), что, если луч антенны РЛС находится под достаточно малым углом места, то результирующая диаграмма направленности антенны (ДНА), образованная суммой прямого и отраженных поверхностью земли сигналов, имеет лепестковый характер. При этом количество интерференционных лепестков результирующей ДНА существенно зависит от ширины ДНА, высоты подъема антенны и длины волны.
Если цель движется на достаточно малой и постоянной высоте (не более нескольких сот метров) с дальности, соответствующей углу места ниже максимума первого интерференционного лепестка результирующей ДНА, то по мере ее приближения к РЛС она будет попадать в лепестки и провалы результирующей ДНА. Благодаря этому будут происходить характерные изменения мощности принимаемых сигналов. В некоторых интервалах дальности принимаемая мощность упадет ниже порогового уровня, и нормальное радиолокационное наблюдение будет нарушено.
Исходя из вышесказанного, введем следующее определение низколетящей цели. Воздушная цель является низколетящей, если она летит на высоте не более нескольких сот метров и большую часть полета находится в области интерференционных лепестков результирующей ДНА.
Известны многоканальные (моноимпульсные) способы измерения угловых координат (угла места и азимута) целей (Теоретические основы радиолокации. Под ред. Я.Д.Ширмана, М.: Сов. радио, 1970, с.296). В этих способах используются два или более самостоятельных приемных канала, в которых амплитуды и фазы принятых сигналов зависят от направления прихода радиоволн.
Известен, в частности, моноимпульсный амплитудный суммарно-разностный способ измерения угла места цели (Теоретические основы радиолокации. Под ред. Я.Д.Ширмана, М.: Сов. радио, 1970, с.303, рис.5.69). Способ заключается в следующем. В заданном угловом направлении формируют два луча с одинаковыми диаграммами направленности антенны F1(θ) и F2(θ), максимумы которых разнесены между собой на некоторый угол. Сигналы с выходов антенн синфазно суммируют и получают суммарную ДНА: FC(θ)=F1(θ)+F2(θ). Одновременно эти же сигналы вычитают и получают разностную ДНА: FP(θ)=F1(θ)-F2(θ). Канал с суммарной ДНА — суммарный канал — служит для обнаружения целей и измерения дальности до цели. Канал с разностной ДНА — разностный канал — содержит информацию об угловом положении цели, поскольку величина сигнала в нем зависит от углового отклонения цели от равносигнального направления.
Известно устройство (фиг.1), реализующее моноимпульсный амплитудный суммарно-разностный способ измерения угла места цели (Теоретические основы радиолокации. Под ред. Я.Д.Ширмана, М.: Сов. радио, 1970, с.306-307, рис.5.74). Устройство содержит антенну с двумя приемопередающими облучателями, устройство формирования суммы и устройство формирования разности принятых сигналов, соединенные с двумя выходами антенны, два смесителя, причем вход первого из них соединен с выходом устройства формирования суммы принятых сигналов, а вход второго — с выходом устройства формирования разности принятых сигналов, гетеродин, первый и второй выходы которого соединены со вторыми входами соответственно первого и второго смесителя, первый и второй усилители промежуточной частоты, входы которых соединены с выходами соответственно первого и второго смесителя, фазовый детектор, первый и второй входы которого соединены с выходами соответственно первого и второго усилителей промежуточной частоты, исполнительное устройство, вход которого соединен с выходом фазового детектора, а выход механически соединен с антенной, координатный выход антенны является выходом известного устройства.
Недостатки известного моноимпульсного амплитудного суммарно-разностного способа и реализующего его устройства при измерении угла места НЛЦ состоят в следующем.
Моноимпульсный амплитудный суммарно-разностный способ измерения угла места цели, являясь потенциально наиболее точным для измерения угловых координат целей, в том числе угла места, в значительной степени подвержен влиянию переотражений сигналов от поверхности земли. Это объясняется тем, что для реализации его потенциальных возможностей должна быть обеспечена высокая идентичность лучей разностной ДНА. При измерении угла места цели два луча располагаются один над другим, при этом равносигнальное направление разностной ДНА направлено на цель. Если цель является низколетящей, то из-за влияния переотражений сигналов поверхностью земли нижний луч разностной ДНА приобретает значительно выраженный лепестковый характер, в то время как верхний луч деформируется в меньшей степени. В результате, лучи разностной ДНА перестают быть идентичными и ошибки измерения угла места НЛЦ оказываются весьма значительными (фиг.7).
Наиболее близкий одноканальный способ измерения угловых координат цели (угла места и азимута) включает излучение зондирующих сигналов, прием отраженных от цели сигналов и сравнение их с порогом обнаружения, измерение дальности до цели и угловых координат луча антенны РЛС, соответствующих обнаруженным сигналам, формирование углового пакета обнаруженных сигналов, вычисление угловых координат цели (Теоретические основы радиолокации. Под ред. Я.Д.Ширмана, М.: Сов. радио, 1970, с.284-286). Угловые координаты цели вычисляют путем весовой обработки сигналов сформированного углового пакета (в приведенном источнике вместо понятия «угловой пакет сигналов» используется идентичное понятие «пачка сигналов»).
Наиболее близкая к заявляемой РЛС (патент РФ №2235342) содержит (фиг.2) передатчик 1, антенный переключатель 2, антенну 3, приемник 4, пороговое устройство 5, синхронизатор 6, блок оценки угловых координат 7, при этом выход передатчика 1 соединен со входом антенного переключателя 2, вход/выход которого соединен с антенной 3, выход антенного переключателя 2 соединен со входом приемника 4, выход которого соединен со входом порогового устройства 5, выход порогового устройства 5 и координатный выход антенны 3 соединены соответственно с первым и вторым входами блока оценки угловых координат 7, первый и второй выходы синхронизатора 6 соединены с синхровходами передатчика 1 и блока оценки угловых координат 7 соответственно, выход блока оценки угловых координат 7 является выходом РЛС.
Работа наиболее близкой к заявляемой РЛС при измерении угла места цели происходит следующим образом. В передатчике 1 по командам синхронизатора 6 (импульсам синхронизации) формируются зондирующие сигналы, которые в процессе обзора пространства с помощью антенны 3 излучаются в пространство. Отраженные от цели сигналы принимаются антенной 3, поступают в приемник 4. С выхода приемника 4 сигналы поступают на вход порогового устройства 5, где сравниваются с порогом, который задается исходя из допустимой вероятности ложных тревог. Сигналы, уровень которых превышает пороговый, проходят на выход порогового устройства 5. Сигналы с выхода порогового устройства 5 и сигналы, пропорциональные угловым координатам луча антенны 3, поступают в блок оценки угловых координат 7, где по мере перемещения луча антенны по углу места формируется угловой пакет сигналов, отраженных от цели. С помощью весовой обработки сигналов, входящих в угловой пакет, производится вычисление угла места цели.
Недостаток наиболее близких способа и устройства состоит в больших ошибках измерения угла места НЛЦ (фиг.8). Указанные ошибки возникают из-за влияния сигналов, переотраженных поверхностью земли. Возникающая при этом лепестковая структура результирующей ДНА не позволяет сопоставить угловое положение максимума луча ДНА с углом места НЛЦ с требуемой точностью.
Техническим результатом (решаемой задачей) заявляемых технических решений является уменьшение ошибок при измерении угла места низколетящей цели, возникающих за счет переотражений сигналов поверхностью земли.
Технический результат достигают тем, что в способе измерения угла места низколетящей цели (НЛЦ) с помощью радиолокационной станции (РЛС), включающем обнаружение НЛЦ и измерение дальности до НЛЦ, согласно изобретению предварительно с помощью дополнительных радиолокационных, оптических или других средств, имеющих точность измерения угла места в условиях переотражений от поверхности земли не хуже, чем соответствующая точность РЛС в условиях отсутствия указанных переотражений, измеряют угол места НЛЦ ε0, затем измеряют дальность до НЛЦ R0, соответствующую измеренному углу места ε0, после чего при дальнейшем движении НЛЦ измеряют дальность до НЛЦ Ri и определяют угол места НЛЦ εi по формуле:

где i — номер измерения дальности до НЛЦ Ri и вычисления угла места НЛЦ εi;
RЗ=6371 км — радиус Земли;
ha — высота антенны РЛС.
Технический результат достигают также тем, что предварительное измерение угла места НЛЦ ε0 и дальности до НЛЦ R0, соответствующей измеренному углу места ε0, осуществляют с помощью дополнительной РЛС с узким лучом по углу места.
Технический результат достигают также тем, что для предварительного измерения угла места НЛЦ ε0 и дальности до НЛЦ R0, соответствующей измеренному углу места ε0, в заданных азимутальных направлениях βj, где j — номер заданного азимутального направления, с помощью дополнительных средств, например, с помощью теодолита, измеряют соответствующие углы закрытия εзакр j, после чего с помощью РЛС в момент, когда НЛЦ впервые обнаружена над радиогоризонтом, измеряют дальность до НЛЦ R0, при этом угол закрытия εзакр k, соответствующий азимутальному направлению НЛЦ βk, в котором НЛЦ впервые обнаружена над радиогоризонтом, выбирают в качестве предварительно измеренного угла места НЛЦ ε0.
Технический результат достигают также тем, что в радиолокационной станции, содержащей передатчик, антенный переключатель, антенну, приемник, пороговое устройство, синхронизатор, при этом выход передатчика соединен со входом антенного переключателя, вход/выход которого соединен с антенной, выход антенного переключателя соединен со входом приемника, выход которого соединен со входом порогового устройства, первый выход синхронизатора соединен с синхровходом передатчика, согласно изобретению введены запоминающее устройство и вычислитель угла места НЛЦ, при этом первый, второй и третий входы вычислителя угла места НЛЦ соединены соответственно с выходом порогового устройства, координатным выходом антенны и выходом запоминающего устройства, синхровход вычислителя угла места НЛЦ соединен со вторым выходом синхронизатора.
Суть заявляемых технических решений состоит в следующем.
Известно, что для низколетящих целей (летящих на высоте не более нескольких сот метров) характерны практически постоянная высота полета и отсутствие маневров в вертикальной плоскости. Эта особенность НЛЦ используется в заявляемых технических решениях.
Измерения угла места НЛЦ в любой точке ее полета производятся следующим образом.
Вначале с помощью дополнительных средств проводят предварительные измерения угла места НЛЦ ε0 и дальности до НЛЦ R0, соответствующей этому углу места (фиг.3). При этом точность измерения угла места с помощью применяемых дополнительных средств в условиях воздействия переотражений сигналов поверхностью земли должна быть не хуже точности измерения угла места РЛС в условиях отсутствии такого воздействия. Результаты предварительных измерений используются при последующих операциях по определению угла места НЛЦ.
Для последующего определения угла места εi этой движущейся НЛЦ, которое может быть осуществлено по мере необходимости в любой точке ее траектории, достаточно измерить дальность до НЛЦ Ri (где i — номер измерения) в этой точке. Угол места НЛЦ εi после этого вычисляют по формуле (1), следующей из геометрических представлений, приведенных на фиг.3.
В соответствии с зависимым пунктом 1 формулы изобретения для предварительных измерений используют дополнительную РЛС с более узким лучом ДНА по углу места. Известно, что степень воздействия переотражений сигналов поверхностью земли на результирующую ДНА РЛС при фиксированном положении луча уменьшается с уменьшением ширины луча. Поэтому РЛС с более узким лучом в угломестной плоскости позволяет измерить угол места НЛЦ с большей точностью, чем РЛС с более широким лучом. (Однако применение РЛС с узким лучом вместо наиболее близкой к заявляемой РЛС во всей зоне обзора проблематично, поскольку ее затраты времени на обзор всей зоны больше: соотношение затрат времени пропорционально соотношению угловых размеров луча). Таким образом, с помощью указанной РЛС осуществляют предварительные измерения угла места НЛЦ ε0 и дальности до НЛЦ R0 (фиг.4), которые затем используются в формуле (1) для определения угла места εi в любой точке полета НЛЦ.
В соответствии с зависимым пунктом 2 формулы изобретения в заданных азимутальных направлениях βj (где j — номер заданного азимутального направления), в которых ожидается появление НЛЦ, предварительно с помощью дополнительных средств, например, с помощью теодолита, измеряют углы закрытия εзакр j (фиг.5).
Углом закрытия в заданном азимутальном направлении βj, как известно, называется угол εзакр j, который образует с горизонтальной осью прямоугольной системы координат РЛС прямая, проходящая через центр антенны РЛС в азимутальном направлении βj и касающаяся поверхности земли (Мищенко Ю.А. Зоны обнаружения, М.: Военное издательство, 1963, с.45).
После этого с помощью РЛС осуществляют обнаружение НЛЦ, и в момент, когда НЛЦ впервые обнаружена над радиогоризонтом, также с помощью РЛС измеряют дальность до НЛЦ R0. Угол закрытия εзакр k, соответствующий азимутальному направлению НЛЦ βk, в котором НЛЦ впервые обнаружена над радиогоризонтом, выбирают в качестве предварительно измеренного угла места НЛЦ ε0. Таким образом предварительно измеренные угол места НЛЦ ε0 и дальность до НЛЦ R0 затем используются в формуле (1) для определения угла места в любой точке полета НЛЦ.
Поскольку переотражения зондирующего сигнала от поверхности земли не влияют на измерение дальности до НЛЦ, то точность измерения угла места НЛЦ оказывается значительно выше, чем у известных способов.
На фиг.7 и фиг.8 для иллюстрации приведены оценки относительной точности измерения угла места НЛЦ δε (в долях ширины ДНА РЛС по углу места по уровню половинной мощности), полученные при математическом моделировании заявляемых технических решений.
Из графиков следует, что, как в известном, так и в наиболее близком способах измерения угла места НЛЦ (пунктирные линии) вследствие лепесткового характера результирующей ДНА точность измерения угла места НЛЦ изменяется в значительных пределах. (Максимумы графиков соответствуют положению НЛЦ между интерференционными лепестками результирующей ДНА, минимумы графиков — в максимумах интерференционных лепестков). В заявляемом способе (сплошные линии) влияние переотражений сигналов поверхностью земли отсутствует. Точность измерения угла места изменяется в небольших пределах, так как определяется, главным образом, ошибками предварительного измерения угла места НЛЦ ε0 (в приведенных зависимостях указанная ошибка взята равной 3 угловым минутам).
Из графиков следует также, что заявляемый способ в условиях переотражений сигналов поверхностью земли позволяет измерять угол места НЛЦ на большей части ее траектории с точностью, значительно превышающей точность и в моноимпульсном амплитудном суммарно-разностный способе (фиг.7) и в одноканальном способе с весовой обработкой сигналов угловых пакетов (фиг.8).
Предлагаемый способ целесообразно использовать для измерения угла места НЛЦ в качестве дополнения к основному способу измерения угла места.
Таким образом достигается заявляемый технический результат.
Изобретения иллюстрируются следующими чертежами.
Фиг.1 — блок-схема известного устройства, реализующего моноимпульсный амплитудный суммарно-разностный способ измерения координат.
Фиг.2 — блок-схема наиболее близкой к заявляемой РЛС.
Фиг.3 — иллюстрация заявляемого способа по независимому пункту 1.
Фиг.4 — иллюстрация заявляемого способа по зависимому пункту 2.
Фиг.5 — иллюстрация заявляемого способа по зависимому пункту 3.
Фиг.6 — блок-схема заявляемой РЛС.
Фиг.7 — графики относительной ошибки измерения угловых координат НЛЦ в заявляемом способе (сплошная линия) и в моноимпульсном амплитудном суммарно-разностном способе (пунктирная линия). НЛЦ движется на высоте 300 м, ошибка предварительного измерения угла места ε0 равна трем угловым минутам.
Фиг.8 — графики относительной ошибки измерения угловых координат НЛЦ в заявляемом способе (сплошная линия) и в одноканальном способе с весовой обработкой сигналов угловых пакетов (пунктирная линия). НЛЦ движется на высоте 300 м, ошибка предварительного измерения угла места ε0 равна трем угловым минутам.
Заявляемая РЛС (фиг.6) содержит передатчик 1, антенный переключатель 2, антенну 3, приемник 4, пороговое устройство 5, синхронизатор 6, запоминающее устройство 8, вычислитель угла места НЛЦ 9, при этом выход передатчика 1 соединен со входом антенного переключателя 2, вход/выход которого соединен с антенной 3, выход антенного переключателя 2 соединен со входом приемника 4, выход которого соединен со входом порогового устройства 5, первый и второй выходы синхронизатора 6 соединены соответственно с синхровходом передатчика 1 и синхровходом вычислителя угла места НЛЦ 9, первый, второй и третий входы вычислителя угла места НЛЦ 9 соединены соответственно с выходом порогового устройства 5, координатным выходом антенны 3 и выходом запоминающего устройства 8.
Заявляемая радиолокационная станция может быть выполнена с использованием следующих функциональных элементов.
Передатчик 1 — импульсного типа (Справочник по основам радиолокационной техники. — М., 1967, с.278).
Антенный переключатель 2 — выполнен на циркуляторе (Справочник по основам радиолокационной техники. — М., 1967, с.146-147).
Антенна 3 — фазированная антенная решетка с электронным сканированием по одной или обеим угловым координатам и с круговым механическим вращением (Справочник по радиолокации. Под ред. М.Сколника, т.2, — М.: Сов. радио, 1977, с.132-138).
Приемник 4 — супергетеродинного типа (Справочник по основам радиолокационной техники. — М., 1967, с.343-344).
Запоминающее устройство 8 — стандартная микросхема (Интегральные микросхемы. Справочник под ред. Т.В.Тарабрина, — М.: Радио и связь, 1984).
Вычислитель 9 — реализует вычисления в соответствии с формулой (1).
Работа заявляемой РЛС при измерении угла места НЛЦ происходит следующим образом.
Перед началом работы РЛС в заданных азимутальных направлениях (определяемых исходя из возможности появления в них НЛЦ) βj, где j — номер заданного азимутального направления (j=1, . m, где m — количество заданных азимутальных направлений), предварительно с помощью дополнительных средств, например, с помощью теодолита, измеряются соответствующие углы закрытия εзакр j. Измеренные значения εзакр j и азимутальные направления βj записываются в запоминающее устройство 8 и хранятся там (до тех пор, пока РЛС не сменит позицию).
В процессе работы РЛС осуществляет обзор заданной зоны. Для этого в передатчике 1 по командам синхронизатора 6 (импульсам синхронизации) формируются зондирующие сигналы, которые с помощью антенны 3 излучаются в пространство.
Как только НЛЦ выходит из-за радиогоризонта, она облучается зондирующим сигналом РЛС. Отраженный от нее сигнал принимается антенной 3 и поступает в приемник 4. С выхода приемника 4 сигнал подается на вход порогового устройства 5, где сравнивается с порогом обнаружения. Если уровень сигнала превышает пороговый, то он проходит на выход порогового устройства 5 и далее — на первый вход вычислителя угла места НЛЦ 9. С координатного выхода антенны 3 на второй вход вычислителя угла места НЛЦ 9 подается значение азимутального положения луча, которое соответствует азимуту обнаруженной НЛЦ βнлц.
В вычислителе угла места НЛЦ 9 для данной НЛЦ производятся следующие операции.
Во-первых, осуществляется предварительное определение угла места НЛЦ ε0 на основании данных, записанных в запоминающем устройстве 8. Для этого осуществляется сравнение измеренного азимута НЛЦ βнлц с азимутальными направлениями βj, хранящимися в запоминающем устройстве 8, и выбирается ближайшее к βнлц значение βk. Значение угла закрытия εзакр k, соответствующее азимутальному направлению βk, выбирается в качестве предварительно измеренного угла места НЛЦ ε0.
Во-вторых, измеряется дальность до НЛЦ R0, соответствующая углу места ε0. Для этого измеряется время запаздывания отраженного радиосигнала относительно зондирующего, которое определяется исходя из разности между моментом появления импульса синхронизатора 6, соответствующего моменту излучения зондирующего сигнала, и моментом прихода сигнала с выхода порогового устройства 5. Дальность до НЛЦ R0 после этого рассчитывается по известной формуле (Теоретические основы радиолокации. Под ред. Я.Д.Ширмана. М.: Сов. Радио, 1970, стр.221). Предварительно измеренные величины ε0 и R0 запоминаются и сохраняются для данной НЛЦ.
В-третьих, по мере необходимости, определяется угол места НЛЦ в любой i-й точке ее траектории. Для этого измеряется дальность до НЛЦ Ri и по формуле (1) вычисляется ее угол места εi.
Таким образом, заявленные технические решения обеспечивают достижение технического результата — уменьшение ошибок при измерении угла места низколетящей цели, возникающих за счет переотражений сигналов поверхностью земли.
Claims ( 4 )
1. Способ измерения угла места низколетящей цели (НЛЦ) с помощью радиолокационной станции (РЛС), включающий обнаружение НЛЦ и измерение дальности до НЛЦ, отличающийся тем, что предварительно с помощью дополнительных радиолокационных, оптических или других средств, имеющих точность измерения угла места в условиях переотражений от поверхности земли не хуже, чем соответствующая точность РЛС в условиях отсутствия указанных переотражений, измеряют угол места НЛЦ ε0, затем измеряют дальность до НЛЦ R0, соответствующую измеренному углу места ε0, после чего при дальнейшем движении НЛЦ измеряют дальность до НЛЦ Ri и определяют угол места НЛЦ εi по формуле

где i — номер измерения дальности до НЛЦ Ri и угла места НЛЦ εi;
Rз=6371 км — радиус Земли;
ha — высота антенны РЛС.
2. Способ по п.1, отличающийся тем, что предварительное измерение угла места НЛЦ ε0 и дальности до НЛЦ R0, соответствующей измеренному углу места ε0, осуществляют с помощью дополнительной РЛС с узким лучом по углу места.
3. Способ по п.1, отличающийся тем, что для предварительного измерения угла места НЛЦ ε0 и дальности до НЛЦ R0, соответствующей измеренному углу места ε0 в заданных азимутальных направлениях βj, где j — номер заданного азимутального направления, с помощью дополнительных средств, например с помощью теодолита, измеряют соответствующие углы закрытия εзакр j, после чего с помощью РЛС в момент, когда НЛЦ впервые обнаружена над радиогоризонтом, измеряют дальность до НЛЦ R0, при этом угол закрытия εзакр j, соответствующий азимутальному направлению НЛЦ βk, в котором НЛЦ впервые обнаружена над радиогоризонтом, выбирают в качестве предварительно измеренного угла места НЛЦ ε0.
4. Радиолокационная станция, содержащая передатчик, антенный переключатель, антенну, приемник, пороговое устройство, синхронизатор, при этом выход передатчика соединен со входом антенного переключателя, вход/выход которого соединен с антенной, выход антенного переключателя соединен со входом приемника, выход которого соединен со входом порогового устройства, первый выход синхронизатора соединен с синхровходом передатчика, отличающаяся тем, что введены запоминающее устройство и вычислитель угла места НЛЦ, при этом первый, второй и третий входы вычислителя угла места НЛЦ соединены соответственно с выходом порогового устройства, координатным выходом антенны и выходом запоминающего устройства, синхровход вычислителя угла места НЛЦ соединен со вторым выходом синхронизатора.
RU2006114640/09A 2006-04-28 2006-04-28 Способ измерения угла места низколетящей цели и радиолокационная станция для его реализации RU2307375C1 ( ru )
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| RU2006114640/09A RU2307375C1 ( ru ) | 2006-04-28 | 2006-04-28 | Способ измерения угла места низколетящей цели и радиолокационная станция для его реализации |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| RU2006114640/09A RU2307375C1 ( ru ) | 2006-04-28 | 2006-04-28 | Способ измерения угла места низколетящей цели и радиолокационная станция для его реализации |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| RU2307375C1 true RU2307375C1 ( ru ) | 2007-09-27 |
Какой буквой обозначается угол места в радиолокации
Основные определения, термины
и понятия по военно-технической подготовке
- Военно-техническая подготовка
- Тактитка зенитных ракетных войск
- Боевое применение зенитного ракетного комплекса
5.3. Радиолокационный обзор
5.3.1. Зона видимости РЛС
Радиолокационное наблюдение осуществляется в определенной области пространства, которую называют зоной видимости (ЗВ) или зоной обзора (ЗО) РЛС. Размеры этой зоны определяются количеством измеряемых координат и интервалами, в пределах которых возможно измерение.

В простейшем случае при измерении двух координат – азимута b и дальности Д можно наглядно отобразить зону видимости РЛС в полярных координатах (рисунок 1).
Для большинства современных РЛС зона видимости – трехмерная, а в доплеровских локаторах кроме трех координат, задающих пространственное положение цели, может измеряться и четвертая координата – радиальная скорость.
Зона видимости такой РЛС является четырехмерной и характеризуется четырьмя координатными интервалами обзора:
Зона обзора по радиальной скорости может быть представлена в двух вариантах – для приближающихся к РЛС целей и для удаляющихся от РЛС целей, что выражено в формуле знаком модуля.

Значения координатных интервалов в современных РЛС велики, а разрешающая способность в определении координат очень высока.
Для количественного описания числа элементов разрешения целесообразно пользоваться нормированными единицами, определяемыми отношением интервала обзора по каждой из оцениваемых координат к соответствующему интервалу разрешения:

 ;
;  ;
;  ;
;
то есть количеством разрешаемых элементов в зоне обзора РЛС по каждой из координат.
Общее количество элементов разрешения в ЗО:
Для четырехмерной ЗО число элементов разрешения может достигать миллионов.
5.3.2. Дальность действия РЛС
Потенциальную дальность действия РЛС определяют требования к мощности передатчика, чувствительности приемника и коэффициенту усиления антенной системы РЛС, необходимым для обнаружения цели на заданной дальности. Связь между названными параметрами определяет уравнение дальности действия РЛС для простейшего характерного случая, когда цель находится в максимуме передающей и приемной диаграмм направленности, а помехи отсутствуют

,
Д мах — максимальная дальность обнаружения РЛС (м);
Р изл — мощность, излучаемая передатчиком РЛС (Вт);
Р пр.min — минимальная мощность на входе приемника РЛС, при которой возможно обнаружение цели (чувствительность приемника) (Вт);
l- длина волны излучаемых колебаний (м);
G п max , G пр max — коэффициенты усиления передающей и приемной антенн РЛС.
Для определения реальной дальности обнаружения следует учесть дальность прямой видимости , за пределами которой цель скрыта от РЛС линией горизонта.
Дальность прямой видимости Дпв в километрах для заданных в метрах высоты расположения антенной системы РЛС HРЛС и высоты полета цели hц определяется по эмпирической формуле

.
Несложно убедиться, что дальность обнаружения самолета на высоте 50 м в 7 раз меньше, чем на высоте 5000 м., поэтому минимальные высоты полета используются СВКН для прорыва системы ПВО. В свою очередь РЛС, предназначенные для работы по маловысотным целям, целесообразно размещать на максимально высоких участках местности, также могут применяться специальные вышки, для увеличения дальности обнаружения.
5.3.3. Разрешаемый объем РЛС
Выделим в зоне обзора четыре соседних элементарных объема 1, 2, 3, 4, в каждом из которых находится одна точечная цель. Элементы 1 и 2 имеют одинаковые угловые координаты, но отличаются по дальности на величину ΔД, элементы 1, 3 отличаются только по азимуту на Δβ и 1,4 — только по углу места на Δε, причем все цели наблюдаются раздельно. Будем сокращать каждую из величин ΔД, Δβ, Δε до тех пор, пока раздельное наблюдение целей станет невозможным. Тогда объем 1 и будет разрешаемым объемом (элементом разрешения), его элементами ΔДмин, Δβмин, Δεмин оценивается разрешающая способность станции по дальности, азимуту и по углу места.

Таким образом, разрешающая способность по дальности оценивается минимальным расстоянием ΔДмин между двумя находящимися на одном направлении целями, при котором эти цели наблюдаются раздельно.
Разрешающая способность по азимуту оценивается минимальной разностью азимутов Δβмин двух целей с одинаковыми дальностью и углом места, при которой эти цели еще наблюдаются раздельно.
Разрешающая способность по углу места оценивается минимальной разностью углов места Δεмин двух целей с одинаковыми дальностью и азимутом, при которой эти цели, еще наблюдаются раздельно.
Разрешающая способность по скорости оценивается минимальной разностью радиальных скоростей ΔVr двух целей с одинаковыми координатами Д, β, ε, при которой эти цели еще наблюдаются раздельно.
Для принятия решения одиночная цель или групповая достаточно разрешения целей по одной координате.
Таким образом, разрешающая способность РЛС является тактической характеристикой, определяющей возможности РЛС разделять близко расположенные объекты при их зондировании.
5.3.4. Методы РЛ обзора пространства.
Задача обнаружения целей (получение ответа на вопрос – есть цель или ее нет) решается для каждого элемента разрешения в пределах зоны видимости.
Время, требуемое для обнаружения цели в одном элементе — время анализа t ан .
За время t ан в активных РЛС с пассивным ответом выполняются следующие операции:
- наведение антенной системы на требуемый элемент разрешения;
- излучение зондирующего сигнала (ЗС);
- прием отраженного от цели сигнала (если цель есть в исследуемом элементе разрешения);
- обработка принятого сигнала по заданному алгоритму.
Длительность t ан может достигать десятков миллисекунд.
Если просматривать все элементы ЗО один за другим суммарное время, требуемое на полный просмотр всей зоны (обзор пространства) определяется как t обз = t ан × N , где N = Nr × Nβ × N e × … – количество элементов разрешения в ЗО.
Такой способ обзора пространства принято называть последовательным . Для своей реализации он требует один канал, включающий передатчик, антенную систему и приемник (рисунок).

Очевидно, что для N ~106 и t ан ~10-2сек. время обзора t обз ~104сек. (это более 2 часов и 45 минут). Для обнаружения скоростных воздушных объектов такое время обзора неприемлемо.
Если для уменьшения t обз все элементы разрешения ЗО просмотреть одновременно, то t обз должно стремиться к t ан . Такой способ обзора принято называть параллельным обзором пространства, и для его реализации требуется создание отдельного канала (передатчик, антенная система и приемник) для каждого элемента ЗО (миллион каналов), что также неприемлемо.
На практике используют различные комбинации параллельного и последовательного обзора , которые позволяют получить требуемую величину времени t обз при минимальных аппаратных затратах .
Ключевым моментом является определение потребного времени обзора . Это время определяется потребителем радиолокационной информации (РЛИ). Если потребителем РЛИ выступает ЗРС, то t обз – это период обновления информации о воздушной обстановке в зоне ответственности ЗРС. Учитывая, что целями для ЗРС являются высокоскоростные и маневренные СВКН, t обз должно быть минимальным.
Практическое значение t обз должно составлять порядка 6 секунд и менее.
5.3.5. Обзор пространства по дальности
При использовании коротких ЗС обзор зоны видимости РЛС по дальности происходит в процессе следования ЗС до цели и обратно. Радиолокационные сигналы, отраженные от различных элементов разрешения по дальности, поступают на вход приемного устройства РЛС в различные моменты времени, поэтому обзор пространства по дальности является последовательным .

На рисунке 1 показано временное положение двух импульсных отраженных сигналов (ОС) от целей находящихся на различных дальностях r ц1 и r ц2 . Момент приема каждого сигнала задержан относительно начала излучения ЗС на время запаздывания

,
где ( i = 1, 2), с = 3 · 108 м/с.
Никаких специальных операций для выполнения такого обзора при использовании импульсных ЗС не требуется. При зондировании целей одиночным сигналом измерение t з i не представляет каких-либо затруднений и может производиться, например, путем визуального измерения расстояния между яркостной отметкой цели и центром экрана индикатора с круговой разверткой по координатам азимут-дальность (b-Д), соответствующим моменту излучения ЗС (рисунок 2).

Однако при использовании протяженных во времени сигналов (например, КППРИ), может быть организован и параллельный обзор по дальности .
Если в РЛС в качестве ЗС используется пачка радиоимпульсов (рисунок 3), излучение такого сигнала осуществляется периодически с интервалом Тп в течение времени Тс = МТп .

Для Тп t з макс , имеет место случай неоднозначного обзора по дальности (рисунок 4).

Отраженный от цели сигнал, также как и зондирующий, представляет собой пачку из М радиоимпульсов, смещенную по времени на величину t з относительно момента начала излучения. При этом время запаздывания отраженного сигнала может быть определено только относительно ближайшего слева зондирующего импульса. Такое время запаздывания принято называть относительным t з отн , в отличие от истинного t з .
В общем случае истинное значение времени запаздывания отличается от
t з отн на целое число периодов повторения
где k — число целых периодов повторения, укладывающихся на интервале t з (для случая, показанного на рисунке 4, k = 2).
Неоднозначность в определении дальности является недостатком подобного ЗС, однако, при организации обзора по Д неоднозначность приводит к уменьшению количества элементов разрешения , а, следовательно, к упрощению процедуры обзора.
Поскольку t з отн < Тп , а размер элемента разрешения по Д определяется длительностью одиночного импульса из состава пачки τи, для обнаружения целей с любыми дальностями в пределах D r обз достаточно просмотреть

Для исключения потерь сигналов, расположенных на стыке соседних элементов разрешения, используется взаимное перекрытие разрешаемых элементов, характеризуемое коэффициентом перекрытия Кп который показывает минимальное количество просмотров, используемых для каждой точки на временной оси за одно зондирование.
Например, если Кп = 2, то каждую точку на временной оси просматриваем дважды. Для реализации указанного требования число элементов разрешения следует увеличить в Кп раз.
Кроме того следует учесть, что прием ОС возможен не на всем протяжении Тп , так как на время излучения ЗС приемник закрывается (бланкируется). Длительность бланка составляет t и .
Таким образом, итоговое выражение для определения требуемого числа каналов в приемнике для параллельного обзора по Д с ЗС вида КППРИ составляет

,
5.3.6. Обзор пространства по радиальной скорости
Радиолокационный обзор по радиальной скорости также может быть однозначным или неоднозначным.
Если в качестве ЗС используется монохроматический сигнал, в спектре которого присутствует только одна составляющая, измерение радиальной скорости Vr ц производится однозначно. При этом обзор по Vr ц может осуществляться как последовательно, так и параллельно.
Если же спектр ЗС содержит несколько составляющих (как для КППРИ), то для ответа на вопрос однозначно или неоднозначно будет измеряться радиальная скорость необходимо сравнить максимальное априорное значение доплеровской частоты отраженного сигнала (ОС) с величиной частотного интервала между соседними составляющими спектра ЗС.
АЧС принимаемого сигнала при облучении цели КППРИ показан на рисунке 1, где частота f 0 характеризует положение на частотной оси центрального лепестка спектра ЗС.
Из рисунка видно, что АЧС отраженного сигнала, так же, как АЧС зондирующего, является периодической функцией частоты и содержит

спектральных пиков, повторяющихся с интервалом F п = 1/Тп .

В отличие от АЧС ЗС каждый из спектральных пиков сигнала, отраженного от движущейся цели, смещен относительно соответствующего пика ЗС на величину доплеровской добавки частоты:

,
где Vr ц – радиальная составляющая скорости цели.
Измеряя разницу частот принимаемого и излучаемого сигналов, можно определить величину F дц , а, следовательно, и Vr ц . Однако, как и при измерении дальности, периодичность спектров обоих сигналов не всегда позволяет определить ее однозначно. В общем случае результатом подобного измерения будет относительное значение доплеровской частоты F д отн (относительно ближайшего слева или справа пика АЧС ЗС). Истинное ее значение будет выражаться зависимостью:
где h – округленное до целого числа количество интервалов F п , укладывающихся на величине F дц (например, если F дц / F п = 1,49 то h = 1, а если F дц / F п = 1,51 то h = 2).
Из приведенной зависимости следует, что при

,
( h = 0) истинное и относительное значения доплеровской частоты совпадают, а обзор по радиальной скорости является однозначным . При

,
( h ≠ 0) доплеровская частота определяется неоднозначно и обзор по скорости тоже неоднозначен.
Так же как и при обзоре по Д, неоднозначность обзора по скорости можно использовать для уменьшения потребного количества скоростных каналов приемника без потери информации о наличии цели. Вследствие неоднозначности достаточно параллельно просмотреть интервал частот равный F п , а не F д max .
5.3.7. Обзор пространства по угловым координатам.
Для реализации параллельного обзора пространства по угловым координатам радиолокационное наблюдение должно осуществляться по всей зоне обзора одновременно, путем использования многолучевой диаграммы направленности (ДН) антенны и многоканального приемника, число каналов в котором больше или равно числу антенных лучей. Такое построение РЛС на практике не используется, как слишком затратное.
Последовательный обзор производится с помощью одного луча и одноканального приемника, что существенно упрощает конструкцию радиолокатора. При этом зона видимости просматривается последовательно во времени путем перемещения (сканирования) ДН антенны по угловой координате.
Антенны РЛС с последовательным обзором могут иметь диаграммы двух основных видов – игольчатые и веерообразные . При этом обзор может быть круговым или секторным .
Круговой обзор может быть реализован, например, путем механического вращения антенны с веерообразной ДН в азимутальной плоскости с постоянной угловой скоростью W а (рисунок 1).

Однократный просмотр зоны видимости осуществляется за время Тобз, называемое периодом обзора

.
Если в зоне видимости присутствует цель, то сигнал, отраженный целью и принятый антенной РЛС, пропорционален зондирующему сигналу, промодулированному квадратом сечения ДН в плоскости сканирования антенны (рисунок 2). При совпадении максимума ДН с угловым
положением цели амплитуда принятого сигнала достигает максимума.

Из рисунка видно, что в случае углового сканирования с непрерывным перемещением луча вид принимаемого сигнала существенно зависит от формы ДН.
Как для непрерывного, так и для импульсного сигнала длительность принятой посылки равна времени облучения цели:
где D Q 0,5 – ширина луча ДН по уровню половинной мощности в плоскости сканирования антенны.
Веерная форма диаграммы позволяет охватить всю зону видимости
по e за одно зондирование, однако не позволяет измерить значение этой координаты, поэтому РЛС, использующие такую ДН, как правило, двухкоординатные.
В трехкоординатных РЛС, измеряющих дальность и обе угловые координаты, используется ДН игольчатой формы, а обзор осуществляется последовательным перемещением луча в обеих плоскостях. Рассмотрим один из вариантов кругового обзора для РЛС с фазированной антенной решеткой (рис. 3).

При фиксированном значении азимута максимум ДН последовательно с интервалом D e ск , называемым шагом сканирования по e , перемещается от минимального e н до максимального e к значений, после чего вновь возвращается в положение e н , смещаясь при этом на один шаг сканирования по азимуту D b ск .
Далее цикл обзора повторяется и таким образом осуществляется круговой обзор в азимутальной плоскости и секторный в угломестной. Шаг сканирования подбирается так, чтобы исключить участки непросматриваемого пространства между соседними лучами. В зависимости от решаемых РЛС задач и характеристик ДН сканирование может вестись с перекрытием соседних лучей D e ск D e 0,5 , D b ск D b 0,5 , или без него D e ск = D e 0,5 , D b ск = D b 0,5 . Оба варианта выбора шага сканирования проиллюстрированы на рисунке 3. По азимуту показано сканирование с перекрытием D b ск D b 0,5 , а по углу места без перекрытия D e ск = D e 0,5 .
Секторный обзор по угловым координатам, как правило, используется в РЛС сопровождения целей и ракет. Он предусматривает излучение и прием пачки импульсов для текущего углового направления и лишь затем перенос луча на следующее направление. При этом линия огибающей принимаемого сигнала имеет прямоугольную форму, и не зависит от параметров ДН.
Рассмотренные примеры последовательного обзора по угловым координатам относятся к случаю обзора по жесткой программе, когда ДН перемещается независимо от результатов радиолокационного наблюдения. На практике РЛС обнаружения и сопровождения целей могут использовать и гибкие программы обзора. Например, в нечетные периоды происходит обзор, аналогичный рассмотренным жестким программам обзора, а в четные осуществляется подсвет лишь тех угловых направлений, в которых зафиксированы цели. При этом повышается темп обновления радиолокационной информации о целях.