RU2015153689A — Способ определения частоты вращения ротора асинхронных двигателей — Google Patents
Publication number RU2015153689A RU2015153689A RU2015153689A RU2015153689A RU2015153689A RU 2015153689 A RU2015153689 A RU 2015153689A RU 2015153689 A RU2015153689 A RU 2015153689A RU 2015153689 A RU2015153689 A RU 2015153689A RU 2015153689 A RU2015153689 A RU 2015153689A Authority RU Russia Prior art keywords rotor frequencies calculated harmonics determining Prior art date 2015-12-14 Application number RU2015153689A Other languages English ( en ) Inventor Андрей Владимирович Скляр Сергей Николаевич Чижма Original Assignee Федеральное государственное бюджетное образовательное учреждение высшего профессионального образования «Омский государственный университет путей сообщения» Priority date (The priority date is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the date listed.) 2015-12-14 Filing date 2015-12-14 Publication date 2017-06-19 2015-12-14 Application filed by Федеральное государственное бюджетное образовательное учреждение высшего профессионального образования «Омский государственный университет путей сообщения» filed Critical Федеральное государственное бюджетное образовательное учреждение высшего профессионального образования «Омский государственный университет путей сообщения» 2015-12-14 Priority to RU2015153689A priority Critical patent/RU2015153689A/ru 2017-06-19 Publication of RU2015153689A publication Critical patent/RU2015153689A/ru
Links
Claims ( 16 )
1. Способ определения частоты вращения ротора асинхронных двигателей, включающий измерение тока одной фазы статора, оцифровку сигнала, построение спектральной характеристики сигнала с помощью преобразования Фурье, отличающийся тем, что вычисляются нижний и верхний коридоры поиска частот пазовых гармоник в спектре тока статора, определяемых диапазоном устойчивой работы двигателя, при этом нижняя и верхняя частоты нижнего коридора вычисляются как:
Все о частотных преобразователях
Частотные преобразователи — это устройства для плавного изменения частоты вращения синхронных и асинхронных двигателей посредством изменения частоты питающего тока.
В современной технике благодаря простоте конструкции и обслуживания, небольшим габаритам, высокой надёжности, и низкой стоимости огромное распространение получили именно асинхронные электродвигатели.
При работе различных устройств, в качестве привода которых применяются асинхронные электродвигатели, часто возникает необходимость в регулировании их скорости вращения.
Исходя из формулы n = (1 — S)60f/p где n — скорость вращения ротора, S — скольжение, f — частота питающей сети, p — количество пар полюсов.
Существует три способа регулирования скорости вращения асинхронного двигателя:
- — изменение скольжения. Этот способ используется в двигателях с фазным ротором. В цепь фазного ротора вводится регулировочный реостат. При использовании этого способа можно получить большой диапазон регулирования частоты вращения в сторону понижения. Однако этот способ имеет, и ряд недостатков, основным из которых является большие потери на регулировочном реостате (нагрев) т.е. снижение КПД. Как следствие этот способ применяют для кратковременного снижения частоты вращения.
- — изменение числа пар полюсов. Этот способ предполагает использование специальных двигателей (многоскоростных) имеющих более сложную обмотку статора, позволяющую изменять число пар полюсов, и короткозамкнутый ротор. Недостатком этого метода является ступенчатое регулирование (3000, 1500, 1000, 750, 600 об/мин – 1,2,3,4,5 обмотки с 1,2,3,4,5 парами полюсов соответственно), большая стоимость и громоздкость двигателя.
- — изменение частоты питающего тока (напряжения). На практике этот метод, в общем случае (самый простой), предполагает вместе с частотой изменять и действующее значение подведенного напряжения таким образом, что бы отношение U/f было постоянно. Это (изменение входного напряжения) делается для сохранения перегрузочной способности двигателя с изменением частоты сети.
В приводах центробежных насосов и вентиляторов, которые являются типичными представителями переменной механической нагрузки (момент нагрузки возрастает с увеличением скорости вращения) используется функция напряжения к квадрату частоты U/f 2 = сonst.
В более совершенных частотных регуляторах для управления скоростью вращения и электромагнитным моментом двигателя независимо, используется так называемое векторное управление. При этом виде управления необходимо управлять амплитудой и фазой статорного тока (т.е. вектором) в зависимости от положения ротора относительно обмотки статора в каждый момент времени.
Применение частотных регуляторов. Зачем нужен частотный регулятор?
Асинхронные двигатели имеют ряд недостатков (сложность регулирования скорости вращения, большие пусковые токи, относительно малый пусковой момент). Однако благодаря своей простоте, надежности и дешевизне получили огромное распространение в промышленности и быту. Применение же частотных регуляторов «устраняет» недостатки асинхронных двигателей и кроме этого позволяет избежать установки различного дополнительного оборудования, уменьшить потери в технологическом процессе, увеличить КПД самого двигателя, уменьшить износ, как самого двигателя, так и оборудования использующегося в данном технологическом процессе.
Рассмотрим более детально применение частотных регуляторов на примере насосного оборудования. Потери в технологической системе зависят от нагрузки создаваемой потребителями (на неё мы влиять не можем) и гидравлическим сопротивлением элементов этой системы. Так поддержание давления у потребителей на постоянном уровне при изменяющейся нагрузке, возможно только при использовании дополнительного оборудования (различных регуляторов давления, мембранных баков, дроссельных задвижек). Использование этого оборудования создает дополнительное гидравлическое сопротивление и как следствие снижает КПД системы в целом. При использовании частотного регулятора двигатель сам регулирует давление в сети посредством изменения частоты вращения. Кроме того при снижении технологической нагрузки уменьшая частоту вращения насоса, КПД самого насоса тоже возрастает. Таким образом достигается как бы двойной эффект увеличивается КПД системы в целом, за счёт исключения из системы лишнего гидравлического сопротивления и увеличение КПД самого насоса как агрегата.
Применение частотного регулятора также значительно снижает эксплуатационные затраты связанные с износом оборудования. Плавное регулирование вращения (и плавный пуск) практически полностью позволяют избежать как гидравлических ударов, так и скачков напряжения в электросети (особенно актуально в системах, где предусмотрен частый пуск/остановка насоса).
Как определить частоту вращения электродвигателя?

Очевидно, что правильная эксплуатация любой электрической машины предполагает соответствие такого важного ее технического параметра как частота вращения условиям эксплуатации.
Все основные параметры асинхронного электродвигателя изготовителем указываются на металлической бирке — шильдике, прикрепленной к его корпусу. И конечно, в приведенных технических данных обязательно присутствует информация о частоте вращения при номинальной нагрузке.

Однако, на практике, совсем нередки случаи, когда необходимо определить частоту вращения двигателя с отсутствующим шильдиком или с нечитаемыми — стершимися надписями на нем.
Конечно, в таких случаях опытный мастер-электроприводчик, наверняка сможет определить частоту вращения, но у начинающих специалистов-электриков, занимающихся обслуживанием электрического оборудования при решении этого вопроса могут возникнуть некоторые затруднения.
Проще всего определить скорость вращения вала работающего “асинхронника” тахометром. Но, учитывая, что ввиду узкой специфики использования, наличие этого измерительного прибора — большая редкость, данный метод здесь не рассматривается.
Надеемся, предложенный ниже способ окажется полезным. Он применим для асинхронных электродвигателей небольшой и средней мощности, имеющих однослойные статорные обмотки.

Итак, в нашем случае определение частоты вращения электродвигателя предполагает осмотр его статорной обмотки. Поэтому, с двигателя потребуется снять крышку (пошипниковый щит). Если на его валу закреплены шкив или полумуфта для передачи движения, то рекомендуем снять задний щит.
Сняв крышку и крыльчатку вентилятора с вала, следует, открутив винты, снять задний подшипниковый щит, после чего осмотреть торцевую часть статорной обмотки. Далее, надо посчитать количество пазов, занимаемых секциями одной катушки.
Общее количество пазов сердечника, разделенное на количество пазов, занимаемых секциями одной катушки (частное) составит число полюсов. Зная его значение, определяем частоту вращения асинхронного электродвигателя:
2 – 3000 об/мин; 4 – 1500 об/мин; 6 – 1000 об/мин.
Здесь стоит учесть одну особенность асинхронных двигателей — несоответствие скорости вращения магнитного поля и вращения ротора, поэтому скорость может составлять 940 об\мин вместо 1000 или 2940 об/мин вместо 3000.
Как видно, особой сложностью этот способ определения частоты вращения по обмотке не отличается, однако, может быть упрощен; потребуется визуально определить какая часть окружности сердечника статора, занимается секциями одной катушки:
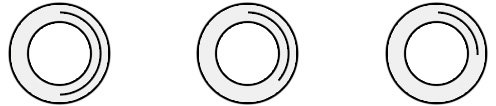
Занятая секциями одной катушки ½ часть сердечника статора двигателя свидетельствует о его частоте вращения 3000 об\мин, ⅓ — 1500 об/мин, ¼ — 1000 об/мин.
© Forum220.ru | 2009 — 2015 | Электропривод Размещение данных материалов на других веб-ресурсах возможно только при наличии обратной гиперссылки на сайт Forum220.ru
Частота вращения электродвигателя
Подавляющее большинство дерево- и металлообрабатывающих станков, насосов, конвейерных лент, тельферов, кран-балок, а также другое подъемное и производственное оборудование приводится в движение электродвигателями переменного тока.
Для безаварийной работы каждого из механизмов необходима правильно подобранная мощность привода и оптимальная скорость вращения вала двигателя.
Синхронная и асинхронная частота вращения электродвигателя
Трехфазное напряжение, подаваемое на обмотки статора, генерирует в нем подвижное магнитное поле, вращающееся с постоянной скоростью. Эта величина получила название «синхронная частота вращения», так как зависит от частоты тока питающего напряжения, а также количества пар полюсов. Она рассчитывается по формуле:
Nс=f*60/p, где:
Nс-количество оборотов магнитного поля статора в минуту (об/мин)
f- частота тока в питающей сети (Гц)
60-количество секунд в минуте
p- число пар полюсовэлектродвигателя
В питающих сетях с частотой тока 50 Гц максимальная синхронная скорость вращения магнитного поля статора асинхронных двигателей не может превышать значения 3000 об/мин. Такие характеристики присущи электродвигателям с одной парой полюсов, то есть таким, у которых каждая из трех обмоток имеет только по одной паре полюсов: «N» — северному и «S» — южному. Например, АИМУР 90 L2 IM1081; АИР 112 М2 IM2001; 5АИ 71 В2 IM3001 и другие.
Это обусловлено тем, что один полный оборот магнитного потока статора в каждой из обмоток совершается в течение одного периода изменения направления движения тока, то есть за 1/50 с. А значит, в минуту мы получаем те самые 3000 об/мин. С увеличением полюсов синхронная скорость уменьшается.Так, синхронная частота двигателей 5АИ 80 А4 IM1081 и 1MA6183-4BC равна 1500 об/мин, а двигателей 5АИ 355 L10 или АИР 250 S10 IM2001- всего 600 об/мин.
Фактическая (асинхронная) частота вращения вала двигателя всегда меньше ее синхронного значения. Это объясняется не только потерями на сопротивление воздуха и трением в подшипниках, но самим принципом работы асинхронных электрических машин.
Разница между этими величинами называется скольжением, выражается в процентах и рассчитывается по формуле:
s=((Nс-Nф)/Nc)*100), где
s — скольжение
Nс – синхронная скорость вращения магнитного потока статора
Nф – фактическая (асинхронная) частота
Для чего нужно знать частоту вращения вала электродвигателя
В процессе подбора привода следует следить не только за соответствием выбранной модели специфике использования и условиям эксплуатации, но и за тем, чтобы частота вращения асинхронного двигателя соответствовала мощности, необходимой для нормальной работы механизма.
Так, для подъемных механизмов (кран-балки, тельферы, лебедки, краны различных типов) высокая частота вращения ротора двигателяне нужна. На таких устройствах используются модели с синхронной скоростью от 600 до 1000 об/мин.
В тоже время особенности работы вентиляционных систем требуют, чтобы частота вращения ротора асинхронного двигателя была более высокой. Поэтому для их комплектации используются высокоскоростные электрические машины.
В зависимости от требуемых напорных характеристик и необходимой объемной подачи, насосное оборудование комплектуется двигателями с синхронной частотой вращения 1500 или 3000 об/мин.
Как определить частоту вращения двигателя
Данный параметр должен быть указан на шильдике электрической машины, также как и его мощность, КПД, схема соединения обмоток, потребляемый ток, коэффициент мощности ( cos φ ). Однако встречаются ситуации, когда информационная табличка отсутствует или ее состояние не позволяет прочитать требуемые данные.
Идеальным вариантом для определения асинхронной частоты вращения является проведение измерений с помощью механического или лазерного тахометра. Однако такие приборы редко можно найти даже на предприятиях. Определить,какая частота вращения удвигателя об/мин, можно и без дорогостоящего оборудования. Для этого достаточно вспомнить, что такое синхронная скоростьи от чего она зависит.
Чтобы найти искомый параметр, нужно узнать,сколько полюсов в двигателе. Это можно сделать простым аналоговым миллиамперметром в режиме измерения силы тока. На обесточенном двигателе, отсоединенном от приводимого механизма, снимаем крышку клеммной коробки. Находим начало и конец одной из обмотокстатора и подключаем к ним щупы прибора.
Делаем отметку на валу и начинаем его вращать в любую сторону, наблюдая за стрелкой миллиамперметра и считая количество ее отклонений от начального положения. Полученная величина укажет, сколько полюсов в испытуемом двигателе. Далее рассчитываем синхронную частоту Nс по приведенной выше формуле.
Регулирование частоты вращения двигателя
Иногда требуется изменить скорость вращения вала электрической машины. Это может понадобиться, если двигатель запускается под нагрузкой или в процессе эксплуатации необходимо кратковременно увеличить частоту вращения. Самым оптимальным вариантом можно считать включение в питающую сеть электродвигателя частотного преобразователя.
Более простым решением является установка двух или трехскоростных моделей и регулировка скорости вращения подключением разных групп обмоток. Но такой способ имеет два недостатка. Изменение скорости происходит не плавно, а ступенчато, и не может быть выполнено без остановки электродвигателя.
Если у вас не получается самостоятельно подобрать электродвигатель или вы сомневаетесь в правильности уже сделанного выбора, можно обратиться к техническим специалистам компании Кабель.РФ ® . После уточнения условий эксплуатации и назначения двигателя, они подберут оптимально подходящую марку и ее типоразмер.
Для оформления заказа позвоните менеджерам компании Кабель.РФ ® по телефону +7 (495) 646-08-58 или пришлите заявку на электронную почту zakaz@cable.ru с указанием требуемой модели электродвигателя, целей и условий эксплуатации. Менеджер поможет Вам подобрать нужную марку с учетом Ваших пожеланий и потребностей