17. Гармонические колебания. Идеальный гармонический осциллятор. Уравнение идеального осциллятора на примере колебаний пружинного маятника и его решение. Гармонические колебания

Графики функций f(x) = sin(x) и g(x) = cos(x) на декартовой плоскости.
Гармоническое колебание — явление периодического изменения какой-либо величины, при котором зависимость от аргумента имеет характер функции синуса или косинуса. Например, гармонически колеблется величина, изменяющаяся во времени следующим образом:


,
где х — значение изменяющейся величины, t — время, остальные параметры — постоянные: А — амплитуда колебаний, ω — циклическая частота колебаний,  — полная фаза колебаний,
— полная фаза колебаний,  — начальная фаза колебаний.
— начальная фаза колебаний.
Обобщенное гармоническое колебание в дифференциальном виде

(Любое нетривиальное [1] решение этого дифференциального уравнения — есть гармоническое колебание с циклической частотой )
Виды колебаний Эволюция во времени перемещения, скорости и ускорения при гармоническом движении
- Свободные колебания совершаются под действием внутренних сил системы после того, как система была выведена из положения равновесия. Чтобы свободные колебания были гармоническими, необходимо, чтобы колебательная система была линейной (описывалась линейными уравнениями движения), и в ней отсутствовала диссипация энергии (последняя вызвала бы затухание).
- Вынужденные колебания совершаются под воздействием внешней периодической силы. Чтобы они были гармоническими, достаточно чтобы колебательная система была линейной (описывалась линейными уравнениями движения), а внешняя сила сама менялась со временем как гармоническое колебание (то есть чтобы зависимость от времени этой силы была синусоидальной).
Применение
Гармонические колебания выделяются из всех остальных видов колебаний по следующим причинам:
- Очень часто [2] малые колебания, как свободные, так и вынужденные, которые происходят в реальных системах, можно считать имеющими форму гармонических колебаний или очень близкую к ней.
- Широкий класс периодических функций может быть разложен на сумму тригонометрических компонентов. Другими словами, любое колебание может быть представлено как сумма гармонических колебаний.
- Для широкого класса систем откликом на гармоническое воздействие является гармоническое колебание (свойство линейности), при этом связь воздействия и отклика является устойчивой характеристикой системы. С учётом предыдущего свойства это позволяет исследовать прохождение колебаний произвольной формы через системы.
Линейный гармонический осциллятор — система, совершающая одномерное движение под действием квазиупругой силы, — является моделью, используемой во многих задачах классической и квантовой теории. Пружинный, физический и математический маятники — примеры классических гармонических осцилляторов. Потенциальная энергия гармонического осциллятора (см. (141.5)) равна
Гармонический осциллятор
Как известно, гармоническим осциллятором называется система, способная совершать гармонические колебания. В физике модель гармонического осциллятора играет важную роль, особенно при исследовании малых колебаний систем около положения устойчивого равновесия. Примером таких колебаний в квантовой механике являются колебания атомов в твердых телах, молекулах и т.д.
Рассмотрим одномерный гармонический осциллятор, совершающий колебания вдоль оси  под действием возвращающей квазиупругой силы
под действием возвращающей квазиупругой силы  . Потенциальная энергия такого осциллятора имеет вид
. Потенциальная энергия такого осциллятора имеет вид

где — собственная частота классического гармонического осциллятора. Таким образом, квантово-механическая задача о гармоническом осцилляторе сводится к задаче о движении частицы в параболической потенциальной яме (4.77) .
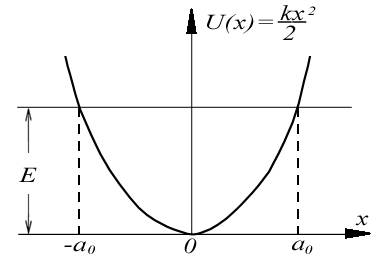
Рассмотрим сначала поведение классического гармонического осциллятора. Пусть частица с полной энергией  совершает колебания в силовом поле (4.77) (рис.4.24). Точки
совершает колебания в силовом поле (4.77) (рис.4.24). Точки  и
и  , в которых полная энергия частицы равна потенциальной энергии
, в которых полная энергия частицы равна потенциальной энергии  , являются для частицы точками поворота. Частица совершает колебательные движения между стенками потенциальной ямы внутри отрезка
, являются для частицы точками поворота. Частица совершает колебательные движения между стенками потенциальной ямы внутри отрезка  , выйти за пределы которого она не может. Амплитуда колебаний
, выйти за пределы которого она не может. Амплитуда колебаний  определяется выражением
определяется выражением  .
.
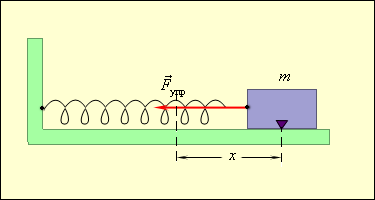
Пружинный маятник — механическая система, состоящая из пружины с коэффициентом упругости (жёсткостью) k (закон Гука), один конец которой жёстко закреплён, а на втором находится груз массы m
Свободные колебания совершаются под действием внутренних сил системы после того, как система была выведена из положения равновесия. Для того, чтобы свободные колебания совершались по гармоническому закону, необходимо, чтобы сила, стремящаяся возвратить тело в положение равновесия, была пропорциональна смещению тела из положения равновесия и направлена в сторону, противоположную смещению (см. §2.1):
В этом соотношении ω – круговая частота гармонических колебаний. Таким свойством обладает упругая сила в пределах применимости закона Гука (см. §1.12):
Силы любой другой физической природы, удовлетворяющие этому условию, называются квазиупругими. Таким образом, груз некоторой массы m, прикрепленный к пружине жесткости k, второй конец которой закреплен неподвижно (рис. 2.2.1), составляют систему, способную совершать в отсутствие трения свободные гармонические колебания. Груз на пружине называют линейным гармоническим осциллятором.
1
Рисунок 2.2.1. Колебания груза на пружине. Трения нет.
Круговая частота ω0 свободных колебаний груза на пружине находится из второго закона Ньютона:

Частота ω0 называется собственной частотой колебательной системы. Период T гармонических колебаний груза на пружине равен
При горизонтальном расположении системы пружина–груз сила тяжести, приложенная к грузу, компенсируется силой реакции опоры. Если же груз подвешен на пружине, то сила тяжести направлена по линии движения груза. В положении равновесия пружина растянута на величину x0, равную

и колебания совершаются около этого нового положения равновесия. Приведенные выше выражения для собственной частоты ω0 и периода колебаний T справедливы и в этом случае. Строгое описание поведения колебательной системы может быть дано, если принять во внимание математическую связь между ускорением тела a и координатой x: ускорение является второй производной координаты тела x по времени t:

Поэтому второй закон Ньютона для груза на пружине может быть записан в виде


где Все физические системы (не только механические), описываемые уравнением (*), способны совершать свободные гармонические колебания, так как решением этого уравнения являются гармонические функции вида
x = xm cos (ωt + φ0).
Уравнение (*) называется уравнением свободных колебаний. Следует обратить внимание на то, что физические свойства колебательной системы определяют только собственную частоту колебаний ω0 или период T. Такие параметры процесса колебаний, как амплитуда xm и начальная фаза φ0, определяются способом, с помощью которого система была выведена из состояния равновесия в начальный момент времени. Если, например, груз был смещен из положения равновесия на расстояние Δl и затем в момент времени t = 0 отпущен без начальной скорости, то xm = Δl, φ0 = 0. Если же грузу, находившемуся в положении равновесия, с помощью резкого толчка была сообщена начальная скорость ±υ0, то
Идеальный гармонический осциллятор. Уравнение идеального осциллятора и его решение. Амплитуда, частота и фаза колебаний
Колебание – один из самых распространённых процессов в природе и технике. Колебания – это процессы, повторяющиеся во времени. Колеблются высотные здания и высоковольтные провода под действием ветра, маятник заведённых часов и автомобиль на рессорах во время движения, уровень реки в течение года и температура человеческого тела при болезни. Звук – это колебания давления воздуха, радиоволны – периодические изменения напряжённости электрического и магнитного поля, свет – это тоже электромагнитные колебания. Землетрясения – колебания почвы, приливы и отливы – изменение уровней морей и океанов, вызываемые притяжением луны и т.д.
Колебания бывают механические, электромагнитные, химические, термодинамические и др. Несмотря на такое многообразие, все колебания описываются одними и теми же дифференциальными уравнениями.
Первыми учёными, изучавшими колебания, были Галилео Галилей и Христиан Гюйгенс. Галилей установил независимость периода колебаний от амплитуды. Гюйгенс изобрёл часы с маятником.
Любая система, которая, будучи слегка выведена из положения равновесия, совершает устойчивые колебания, называется гармоническим осциллятором. В классической физике такими системами являются математический маятник в пределах малых углов отклонения, груз в пределах малых амплитуд колебаний, электрический контур, состоящий из линейных элементов ёмкости и индуктивности.
Гармонический осциллятор можно считать линейным, если смещение от положения равновесия прямо пропорционально возмущающей силе. Частота колебаний гармонического осциллятора не зависит от амплитуды. Для осциллятора выполняется принцип суперпозиции — если действуют несколько возмущающих сил, то эффект их суммарного действия может быть получен как результат сложения эффектов от действующих сил в отдельности.
Гармонические колебания описываются уравнением (рис.1.1.1)
где х -смещение колеблющейся величины от положения равновесия, А – амплитуда колебаний, равная величине максимального смещения, — фаза колебаний, определяющая смещение в момент времени , — начальная фаза, определяющая величину смещения в начальный момент времени, — циклическая частота колебаний.
Время одного полного колебания называется периодом, , где — число колебаний, совершенных за время .
Частота колебаний определяет число колебаний, совершаемых в единицу времени, она связана с циклической частотой соотношением , тогда период .
Скорость колеблющейся материальной точки
Таким образом, скорость и ускорение гармонического осциллятора также изменяются по гармоническому закону с амплитудами и соответственно. При этом скорость опережает по фазе смещение на , а ускорение – на (рис.1.1.2).
Из сопоставления уравнений движения гармонического осциллятора (1.1.1) и (1.1.2) следует, что , или
Это дифференциальное уравнение второго порядка называется уравнением гармонического осциллятора. Его решение содержит два постоянные а и , которые определяются заданием начальных условий
Если периодически повторяющийся процесс описывается уравнениями, не совпадающими с (1.1.1), он н6азывается ангармоническим. Система, совершающая ангармонические колебания, называется ангармоническим осциллятором.
1.1.2. Свободные колебания систем с одной степенью свободы. Комплексная форма представления гармонических колебаний
В природе очень распространены малые колебания, которые система совершает вблизи своего положения равновесия. Если система, выведенная из положения равновесия, предоставлена себе, то есть на неё не действуют внешние силы, то такая система будет совершать свободные незатухающие колебания. Рассмотрим систему с одной степенью свободы.
Устойчивому равновесию соответствует такое положение системы, в котором её потенциальная энергия имеет минимум (q – обобщённая координата системы). Отклонение системы от положения равновесия приводит к возникновению силы , которая стремится вернуть систему обратно. Значение обобщённой координаты, соответствующей положению равновесия, обозначим , тогда отклонение от положения равновесия
Будем отсчитывать потенциальную энергию от минимального значения . Примем Полученную функцию разложим в ряд Маклорена и оставим первый член разложения, имеем: о
где . Тогда с учётом введённых обозначений:
С учётом выражения (1.1.4) для силы, действующей на систему, получаем:
Согласно второму закону Ньютона, уравнение движения системы имеет вид: ,
Выражений (1.1.5) совпадает с уравнением (1.1.3) свободных гармонических колебаний при условии, что
и имеет два независимых решения: и , так что общее решение:
Из формулы (1.1.6) следует, что частота определяется только собственными свойствами механической системы и не зависит от амплитуды и от начальных условий движения.
Зависимость координаты колеблющейся системы от времени можно определить в виде вещественной части комплексного выражения , где A=Xe-iα – комплексная амплитуда, её модуль совпадает с обычной амплитудой, а аргумент – с начальной фазой.
1.1.3. Примеры колебательных движений различной физической природы
Понравилась статья? Добавь ее в закладку (CTRL+D) и не забудь поделиться с друзьями:
Найдите 2 минуты и прочитайте про:
Методы принятия решений Методы принятия управленческих решений делятся на три группы: неформальные (эвристические), коллективные и количественные.
Понятие «профессии». Понятие «специальности». Понятие «специализации» Профе?ссия — род трудовой активности человека, владеющего комплексом теоретических знаний и навыков приобретённых в ходе.
Цель, основные понятия, задачи анализа финансовой отчетности Анализ финансовой отчетности — это процесс, при помощи которого мы оцениваем прошлое и текущее финансовое положение и.
ХИРУРГИЧЕСКИЕ ИНСТРУМЕНТЫ Технические средства специального назначения, с помощью которых производятся те или иные хирургические манипуляции на органах и.
Методы исследования Методы познания. Ест. науки: Наблюдение, опыт, эксперимент. Измерение (Приборы для наблюдений и измерений). Лабораторный.
Гармонический осциллятор — Harmonic oscillator
В классической механике, гармонический осциллятор — это система, которая при смещении из своего равновесного положения испытывает восстанавливающую силу F , пропорциональную смещению x :
где k положительная константа .
Если F является единственной силой, действующей на систему, система называется простым гармоническим осциллятором, и она претерпевает простое гармоническое движение : синусоидальные колебания о точке равновесия, с постоянной амплитудой и постоянной частотой (которая не зависит от амплитуды).
Если также присутствует сила трения (демпфирование ), пропорциональная скорости, гармонический осциллятор описывается как затухающий осциллятор . В зависимости от коэффициента трения система может:
- колебаться с частотой ниже, чем в случае без демпфирования, и с амплитудой, уменьшающейся со временем (с недостаточным демпфированием осциллятор).
- Распад в положение равновесия, без колебаний (перезатухающий осциллятор).
Граничное решение между недемпфированным осциллятором и перезатухающим осциллятором возникает при определенном значении трения коэффициент и называется с критическим демпфированием.
Если присутствует внешняя сила, зависящая от времени, гармонический осциллятор описывается как ведомый осциллятор.
Примеры механики включают маятники (с малыми углами смещения ), массы, соединенные с пружинами, и акустические системы. Другие аналогичные системы включают в себя генераторы электрических гармоник, такие как схемы RLC. Модель гармонического осциллятора очень важна в физике, потому что любая масса, подверженная силе в устойчивом равновесии, действует как гармонический осциллятор для малых колебаний. Генераторы гармонических колебаний широко распространены в природе и используются во многих искусственных устройствах, таких как часы и радиосхемы. Они являются источником практически всех синусоидальных колебаний и волн.
- 1 Простой генератор гармоник
- 2 Генератор затухающих гармоник
- 3 Управляемые генераторы гармоник
- 3.1 Шаг входного сигнала
- 3.2 Синусоидальная движущая сила
- 5.1 Решение переходных процессов
- 5.2 Устойчивое решение
- 5.2.1 Амплитудная часть
- 5.2.2 Фазовая часть
- 8.1 Простой маятник
- 8.2 Система пружина / масса
- 8.2.1 Изменение энергии в системе пружина-демпфирование
Простой гармонический осциллятор
Гармонический осциллятор масс-пружина Простое гармоническое движение
Простой гармонический осциллятор — это осциллятор, который не управляется и не демпфированный. Он состоит из массы m, на которую действует единственная сила F, которая тянет массу в направлении точки x = 0 и зависит только от положения x массы и константы k. Баланс сил (второй закон Ньютона ) для системы равен
Решая это дифференциальное уравнение, мы обнаруживаем, что движение описывается функцией
x (t) = A cos (ω t + φ),
Движение периодическое, повторяющееся синусоидальным с постоянной амплитуда A. В дополнение к своей амплитуде движение простого гармонического осциллятора характеризуется его периодом T = 2 π / ω , время одиночного колебания или его частота f = 1 / T , количество циклов в единицу времени. Положение в данный момент времени t также зависит от фазы φ, которая определяет начальную точку синусоидальной волны. Период и частота определяются размером массы m и силовой постоянной k, а амплитуда и фаза определяются начальной позицией и скоростью.
скоростью и ускорением простые гармонические осцилляторы колеблются с той же частотой, что и положение, но со сдвинутыми фазами. Скорость максимальна при нулевом смещении, а ускорение — в направлении, противоположном смещению.
Потенциальная энергия, запасенная в простом гармоническом осцилляторе в позиции x, равна
Демпфированный гармонический осциллятор

Зависимость поведения системы от значения коэффициента демпфирования ζ Воспроизведение медиа Видеоклип, демонстрирующий затухающий гармонический осциллятор, состоящий из динамической тележки между двумя пружинами. акселерометр наверху тележки показывает величину и направление ускорения.
В реальных осцилляторах трение или демпфирование замедляет движение системы. Из-за силы трения скорость уменьшается пропорционально действующей силе трения. В то время как в простом неприводном гармоническом осцилляторе единственной силой, действующей на массу, является возвращающая сила, в затухающем гармоническом осцилляторе дополнительно присутствует сила трения, которая всегда направлена против движения. Во многих вибрирующих системах сила трения F f может быть смоделирована как пропорциональная скорости v объекта: F f = -cv, где c называется коэффициентом вязкого демпфирования.
Баланс сил (второй закон Ньютона ) для затухающих гармонических осцилляторов равен
который можно переписать в виде
d 2 xdt 2 + 2 ζ ω 0 dxdt + ω 0 2 x = 0, ^ x> t ^ >> + 2 \ zeta \ omega _ <\ frac x> t>> + \ omega _ < 0>^ x = 0,>
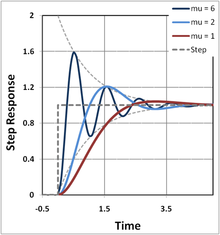
ω 0 = км = >>> называется «незатухающей угловой частотой осциллятора», ζ = c 2 mk > >>> называется «коэффициентом затухания». Переходная характеристика затухающего гармонического осциллятора; кривые построены для трех значений μ = ω 1 = ω 0 √1 — ζ. Время в единицах времени затухания τ = 1 / (ζω 0).
Значение коэффициента затухания ζ критически определяет поведение системы. Затухающий гармонический осциллятор может быть:
- Передемпфированным (ζ>1): система возвращается (экспоненциально затухает ) в установившееся состояние без колебаний. Большие значения коэффициента демпфирования ζ возвращаются в равновесие медленнее.
- Критически затухает (ζ = 1): система возвращается в устойчивое состояние состояние как можно быстрее без колебаний (хотя может произойти перерегулирование). Это часто требуется для демпфирования таких систем, как двери.
- Недемпфирование (ζ ω 1 = ω 0 1 — ζ 2, = \ omega _ >>,>экспоненциальное затухание слабозатухающего гармонического осциллятора определяется как λ = ω 0 ζ. <\ displaystyle \ lambda = \ omega _ \ zeta.>
Q-фактор затухающего осциллятора определяется как
Q связана с коэффициентом демпфирования уравнением Q = 1 2 ζ. >.>
Управляемые гармонические генераторы
Управляемые гармонические генераторы — это демпфированные генераторы, на которые дополнительно действует внешняя сила F (t).
Обычно его переписывают в виде
Это уравнение может быть решено точно для любого движущей силы, используя решения z (t), которые удовлетворяют невынужденному уравнению
d 2 zdt 2 + 2 ζ ω 0 dzdt + ω 0 2 z = 0, ^ < 2>z> t ^ >> + 2 \ zeta \ omega _ <\ frac z> t>> + \ omega _ ^ z = 0,>
и который можно выразить как затухающие синусоидальные колебания:
z (t) = A e — ζ ω 0 t sin (1 — ζ 2 ω 0 т + φ), ^ t> \ sin \ left (> > \ omega _ t + \ varphi \ right),>
в случае, когда ζ ≤ 1. Амплитуда A и фаза φ определяют поведение, необходимое для соответствия начальным условиям.
Шаговый ввод
В случае ζ F (t) m =
с фазой φ, заданной как
Время, необходимое осциллятору для адаптации к изменившимся внешним условиям, имеет порядок τ = 1 / (ζω 0). В физике адаптация называется релаксацией, а τ называется временем релаксации.
В электротехнике кратное τ называется временем установления, то есть временем, необходимым для обеспечения того, чтобы сигнал находился в пределах фиксированного отклонения от конечного значения, обычно в пределах 10%. Термин «перерегулирование» относится к степени, в которой максимум отклика превышает окончательное значение, а «недорез» относится к степени, в которой отклик опускается ниже конечного значения в течение времени, следующего за максимумом отклика.
Синусоидальная движущая сила
Установившееся изменение амплитуды с относительной частотой ω / ω 0 > и демпфирование ζ управляемого простого гармонического генератора. Этот график также называется спектром гармонического осциллятора или спектром движения.
В случае синусоидальной движущей силы:
d 2 xdt 2 + 2 ζ ω 0 dxdt + ω 0 2 x = 1 m F 0 sin (ω T), ^ x> t ^ >> + 2 \ zeta \ omega _ x> t>> + \ omega _ ^ x = > F_ \ sin (\ omega t),>
где F 0 > — управляющая амплитуда, а ω — управляющая частота для механизма привода синусоидальной формы. Этот тип системы присутствует в питаемых переменным током цепях RLC (резистор — индуктор — конденсатор ) и пружинные системы, имеющие внутреннее механическое сопротивление или внешнее сопротивление воздуха.
Общее решение представляет собой сумму переходного решения, которое зависит от начальных условий, и установившегося состояния, т.е. не зависит от начальных условий и зависит только от амплитуды возбуждения F 0 > , частоты возбуждения ω , незатухающая угловая частота ω 0 > , и коэффициент затухания ζ .
Стационарное решение пропорционально движущая сила с индуцированным изменением фазы φ :
x (t) = F 0 m Z m ω sin (ω t + φ), > \ omega>> \ sin (\ omega t + \ varphi),>
φ знак равно arctan (2 ω ω 0 ζ ω 2 — ω 0 2) + N π \ zeta> < \ omega ^ - \ omega _ ^ >> \ right) + n \ pi>
— это фаза колебания относительно движущей силы. Значение фазы обычно принимается между -180 ° и 0 (то есть оно представляет собой фазовое отставание как для положительных, так и для отрицательных значений аргумента arctan).
Для конкретной частоты возбуждения, называемой резонансом или резонансной частотой ω r = ω 0 1-2 ζ 2 = \ omega _ >>> , амплитуда (для заданного F 0 <\ displaystyle F_ > ) максимально. Этот резонансный эффект возникает только при ζ , т. Е. Для систем со значительно слабым демпфированием. Для систем с сильным демпфированием значение амплитуды может стать довольно большим вблизи резонансной частоты.
Переходные решения такие же, как и для невынужденного ( F 0 = 0 = 0> ) затухающего гармонического осциллятора, и представляют реакцию системы на другие события, произошедшие ранее. Переходные решения обычно умирают достаточно быстро, чтобы их можно было игнорировать.
Параметрические генераторы
A параметрический генератор — это управляемый гармонический генератор, в котором энергия возбуждения обеспечивается путем изменения параметров генератора, таких как демпфирующая или восстанавливающая сила. Знакомый пример параметрического колебания — «накачка» на детской площадке качелей. Человек на движущихся качелях может увеличивать амплитуду колебаний без приложения какой-либо внешней движущей силы (толчков), изменяя момент инерции качелей, раскачиваясь вперед и назад («качая») или поочередно стоя и приседая, в ритме с колебаниями качелей. Системой управляет изменение параметров. Примерами параметров, которые можно изменять, являются его резонансная частота ω и демпфирование β .
Параметрические генераторы используются во многих приложениях. Классический параметрический генератор варактор генерирует колебания, когда емкость диода периодически изменяется. Схема, изменяющая емкость диода, называется «накачкой» или «драйвером». В микроволновой электронике параметрические генераторы на основе волноводов / YAG работают аналогичным образом. Разработчик периодически меняет параметр, чтобы вызвать колебания.
Параметрические генераторы были разработаны как малошумящие усилители, особенно в радио- и микроволновом диапазоне частот. Тепловой шум минимален, так как изменяется реактивное сопротивление (а не сопротивление). Другое распространенное использование — преобразование частоты, например преобразование звуковых частот в радиочастоты. Например, оптический параметрический генератор преобразует входную лазерную волну в две выходные волны более низкой частоты ( ω s, ω i , \ omega _ > ).
Параметрический резонанс возникает в механической системе, когда система параметрически возбуждается и колеблется на одной из своих резонансных частот. Параметрическое возбуждение отличается от принуждения, поскольку действие проявляется как изменяющееся во времени изменение системного параметра. Этот эффект отличается от обычного резонанса, потому что он демонстрирует явление нестабильности.
Уравнение универсального осциллятора
равно известное как уравнение универсального осциллятора, поскольку все линейные колебательные системы второго порядка могут быть приведены к этой форме. Это делается с помощью обезразмеривания.
Если функция принуждения равна f (t) = cos (ωt) = cos (ωt c τ) = cos (ωτ), где ω = ωt c, уравнение принимает вид
d 2 qd τ 2 + 2 ζ dqd τ + q = cos (ω τ). ^ q> \ tau ^ >> + 2 \ zeta <\ frac q> \ tau>> + q = \ cos (\ omega \ tau).>
Решение этого дифференциального уравнения состоит из двух частей: «переходной» и «установившейся».
Переходное решение
Решение, основанное на решении обыкновенного дифференциального уравнения, предназначено для произвольных констант c 1 и c 2
qt (τ) = 1 (сверхдемпфирование) e — ζ τ (c 1 + c 2 τ) = e — τ (c 1 + c 2 τ) ζ = 1 (критическое затухание) e — ζ τ [c 1 cos (1 — ζ 2 τ) + c 2 sin (1 — ζ 2 τ)] ζ 1 > \\\ mathrm ^ (c_ + c_ \ tau) = \ mathrm ^ (c_ + c_ \ tau) \ zeta = 1 > \\\ mathrm ^ \ left [c_ \ cos \ left (<\ sqrt <1- \ zeta ^ >> \ tau \ right) + c_ \ sin \ left (<\ sqrt <1- \ zeta ^ >> \ tau \ right) \ right] \ zeta
Транс ient решение не зависит от функции принуждения.
Стационарное решение
Примените «метод комплексных переменных », решив вспомогательное уравнение ниже и затем найдя действительную часть его решения:
d 2 qd τ 2 + 2 ζ dqd τ + q = cos (ω τ) + i sin (ω τ) = ei ω τ. ^ q> \ tau ^ >> + 2 \ zeta <\ frac q> \ tau>> + q = \ cos (\ omega \ tau) + \ mathrm \ sin (\ omega \ tau) = \ mathrm ^ <\ mathrm \ omega \ tau>.>
Предположим, что решение имеет вид
Его производные от нулевого до второго порядка
Подстановка этих величин в дифференциальное уравнение дает
— ω 2 A ei (ω τ + φ) + 2 ζ i ω A ei (ω τ + φ) + A ei (ω τ + φ) = (- ω 2 A + 2 ζ i ω A + A) ei (ω τ + φ) = ei ω τ. A \ mathrm ^ (\ omega \ tau + \ varphi)> + 2 \ zeta \ mathrm \ omega A \ mathrm ^ (\ omega \ tau + \ varphi)> + A \ mathrm ^ (\ omega \ tau + \ varphi)> = (- \ omega ^ A + 2 \ zeta \ mathrm \ omega A + A) \ mathrm ^ (\ omega \ tau + \ varphi)> = \ mathrm ^ \ omega \ tau>.>
Деление на экспоненциальный член слева дает
— ω 2 A + 2 ζ i ω A + A = e — i φ = cos φ — i sin φ. A + 2 \ zeta \ mathrm \ omega A + A = \ mathrm ^ <- \ mathrm \ varphi> = \ cos \ varphi — \ mathrm \ sin \ varphi.>
Приравнивание действительной и мнимой частей приводит к двум независимым уравнениям
A (1 — ω 2) = cos φ, 2 ζ ω A = — sin φ. ) = \ cos \ varphi, \ quad 2 \ zeta \ omega A = — \ sin \ varphi.>
амплитудная часть
график Боде из частотная характеристика идеального гармонического осциллятора
Возведение обоих уравнений в квадрат и сложение их вместе дает
A 2 (1 — ω 2) 2 = cos 2 φ (2 ζ ω A) 2 = sin 2 φ> ⇒ A 2 [(1 — ω 2) 2 + (2 ζ ω) 2] = 1. A ^ (1- \ omega ^ ) ^ < 2>= \ cos ^ \ varphi \\ (2 \ zeta \ omega A) ^ = \ sin ^ \ varphi \ end > \ right \> \ Rightarrow A ^ [(1- \ omega ^ ) ^ + (2 \ zeta \ omega) ^ ] = 1.>
Сравните этот результат с теоретическим разделом о резонансе, а также «часть величины» схемы RLC. Эта амплитудная функция особенно важна для анализа и понимания частотной характеристики систем второго порядка.
Фазовая часть
Чтобы найти φ, разделите оба уравнения и получите
tan φ = — 2 ζ ω 1 — ω 2 = 2 ζ ω ω 2 — 1 ⇒ φ ≡ φ (ζ, ω) = arctg (2 ζ ω ω 2 — 1) + n π. >> = -1 >> \ Rightarrow \ varphi \ Equiv \ varphi (\ zeta, \ omega) = \ arctan \ left ( -1>> \ right) + n \ pi.>
Эта фазовая функция особенно важна для анализа и понимания частотной характеристики систем второго порядка.
Полное решение
Объединение амплитудной и фазовой частей приводит к установившемуся решению
qs (τ) = A (ζ, ω) cos (ω τ + φ (ζ, ω)) = A cos (ω τ + φ). (\ тау) = А (\ дзета, \ омега) \ соз (\ омега \ тау + \ varphi (\ дзета, \ омега)) = А \ соз (\ омега \ тау + \ varphi).>
Решение исходного уравнения универсального осциллятора представляет собой суперпозицию (сумма) переходного и установившегося решений:
Для более полного описания того, как решить указанное выше уравнение, см. линейные ОДУ с постоянными коэффициентами.
Эквивалентные системы
Гармонические осцилляторы, встречающиеся в ряде областей техники, эквивалентны в том смысле, что их математические модели идентичны (см. уравнение универсального осциллятора выше). Ниже приведена таблица, в которой показаны аналогичные величины в системах с четырьмя гармоническими осцилляторами в механике и электронике. Если аналогичные параметры в одной строке таблицы имеют равные числовые значения, поведение осцилляторов — их форма выходного сигнала, резонансная частота, коэффициент демпфирования и т. Д. — одинаковы.
поступательная механика вращательная механика последовательная цепь RLC параллельная цепь RLC положение x угол θ Charge q Flux-связь φ Velocity dxdt x> t>>> Угловая скорость d θ dt \ theta> t>>> Current dqdt q> t>>> Напряжение d φ dt \ varphi> t>>> Mass m Момент инерции I Индуктивность L Емкость C Импульс p Угловой момент L Потоковая связь φ Заряд q жесткость пружины k постоянная кручения μ эластичность 1 / C Магнитное сопротивление 1 / L Демпфирование c Трение вращения Γ Resistance R Проводимость G = 1 / R Привод усилие F (t) Привод крутящий момент τ (t) Напряжение e Ток i Незатухающая резонансная частота fn > : 1 2 π км > > >> 1 2 π μ I > >>> 1 2 π 1 LC < \ displaystyle > <\ sqrt >>> 1 2 π 1 LC > <\ sqrt >>> Коэффициент демпфирования ζ : c 2 1 км > <\ sqrt >>> Γ 2 1 I μ > <\ sqrt >>> R 2 CL > >>> G 2 LC > <\ sqrt <\ frac >>> Дифференциальное уравнение: mx ¨ + cx ˙ + kx = F > + c > + kx = F> I θ ¨ + Γ θ ˙ + μ θ = τ > + \ Gamma > + \ mu \ theta = \ tau> L q ¨ + R q ˙ + q / C = e > + R > + q / С = е> С φ ¨ + G φ ˙ + φ / L = я > + G > + \ varphi / L = i > Приложение к консервативной силе
Проблема простого гармонического осциллятора часто встречается в физике, потому что масса находится в равновесии под действием любой консервативной силы, в пределах небольшие движения, ведет себя как простой гармонический осциллятор.
Консервативная сила — это сила, связанная с потенциальной энергией. Функция потенциальной энергии гармонического осциллятора равна
Для произвольной функции потенциальной энергии V (x) , можно выполнить разложение Тейлора в терминах x около минимума энергии ( x = x 0 < \ displaystyle x = x_ > ) для моделирования поведения малых возмущений от состояния равновесия.
V (x) = V (x 0) + V ′ (x 0) ⋅ (x — x 0) + 1 2 V (2) (x 0) ⋅ (x — x 0) 2 + O (x — х 0) 3. ) + V ‘(x_ ) \ cdot (x-x_ ) + > V ^ (x_ ) \ cdot (x-x_ ) ^ + O (x-x_ ) ^ .>
Поскольку V (x 0) )> — минимум, первая производная, вычисленная как x 0 > , должна быть равна нулю, поэтому линейный член выпадает:
V (x) = V (x 0) + 1 2 V (2) (x 0) ⋅ (x — x 0) 2 + O (x — x 0) 3. ) + > V ^ (x_ ) \ cdot (x-x_ ) ^ + O (x-x_ ) ^ .>
Постоянный член V (x 0) является произвольным и поэтому может быть опущен, а преобразование координат позволяет восстановить форму простого гармонического осциллятора:
Таким образом, для произвольной функции потенциальной энергии V (x) с ненулевой второй производной, можно использовать решение к простому гармоническому осциллятору, чтобы обеспечить приближенное решение для небольших возмущений вокруг точки равновесия.
Примеры
Простой маятник
A Простой маятник демонстрирует приблизительно простое гармоническое движение в условиях отсутствия демпфирования и малой амплитуды.
При отсутствии демпфирования дифференциальное уравнение, определяющее простой маятник длиной l , где g — локальное ускорение свободного падения, равно
d 2 θ dt 2 + gl грех θ = 0. \ theta> >> + > \ sin \ theta = 0.>
Если максимальное смещение маятника невелико, мы можем использовать приближение sin θ ≈ θ и вместо этого рассмотрим уравнение
Общее решение этого дифференциального уравнения:
где A и φ — константы, которые зависят от начальных условий. Использование в качестве начальных условий θ (0) = θ 0 > и θ ˙ (0) = 0 > (0) = 0> , решение дается выражением
где θ 0 > — наибольший угол, достигаемый маятником (то есть θ 0 > — амплитуда маятника). период, время одного полного колебания, задается выражением
что является хорошим приближением к фактическому периоду, когда θ 0 > маленький. Обратите внимание, что в этом приближении период τ не зависит от амплитуды θ 0 > . В приведенном выше уравнении ω представляет угловую частоту.
Система пружина / масса
Система пружина-масса в равновесном (A), сжатом (B) и растянутом (C) состояниях
Когда пружина растягивается или сжимается массой, пружина развивается восстанавливающая сила. Закон Гука определяет соотношение силы, прилагаемой пружиной, когда пружина сжимается или растягивается на определенную длину:
где F — сила, k — жесткость пружины, а x — смещение массы относительно положения равновесия. Знак минус в уравнении указывает на то, что сила, действующая со стороны пружины, всегда действует в направлении, противоположном смещению (т.е. сила всегда действует в направлении нулевого положения), и, таким образом, предотвращает улетание массы на бесконечность.
By using either force balance or an energy method, it can be readily shown that the motion of this system is given by the following differential equation:
If the initial displacement is A, and there is no initial velocity, the solution of this equation is given by
Given an ideal massless spring, m is the mass on the end of the spring. If the spring itself has mass, its effective mass must be included in m .
Energy variation in the spring–damping system
In terms of energy, all systems have two types of energy: potential energy and kinetic energy. When a spring is stretched or compressed, it stores elastic potential energy, which then is transferred into kinetic energy. The potential energy within a spring is determined by the equation U = k x 2 / 2. /2.>
When the spring is stretched or compressed, kinetic energy of the mass gets converted into potential energy of the spring. By conservation of energy, assuming the datum is defined at the equilibrium position, when the spring reaches its maximal potential energy, the kinetic energy of the mass is zero. When the spring is released, it tries to return to equilibrium, and all its potential energy converts to kinetic energy of the mass.
Definition of terms
Symbol Definition Dimensions SI units a Acceleration of mass L T − 2 > > m/s A Peak amplitude of oscillation L > m c Viscous damping coefficient M T − 1 > > N·s/m f Frequency T − 1 > > Hz F Drive force M L T − 2 > > N g Acceleration of gravity at the Earth’s surface L T − 2 > > m/s i Imaginary unit, i 2 = − 1 =-1> — — k Spring constant M T − 2 > > N/m m, M Mass M > kg Q Quality factor — — T Period of oscillation T > s t Time T > s U Potential energy stored in oscillator M L 2 T − 2 T^> > J x Position of mass L > m ζ Damping ratio — — φ Phase shift — rad ω Angular frequency T − 1 > > rad/s ω 0 > Natural resonant angular frequency T − 1 > > rad/s See also
- Anharmonic oscillator
- Critical speed
- Effective mass (spring-mass system)
- Normal mode
- Parametric oscillator
- Phasor
- Q factor
- Quantum harmonic oscillator
- Radial harmonic oscillator
- Elastic p endulum
Notes
References
- Fowles, Grant R.; Cassiday, George L. (1986), Analytic Mechanics (5th ed.), Fort Worth: Saunders College Publishing, ISBN 0-03-96746-5, LCCN93085193 CS1 maint: ignored ISBN errors (link)
- Hayek, Sabih I. (15 Apr 2003). «Mechanical Vibration and Damping». Encyclopedia of Applied Physics. WILEY-VCH Verlag GmbH Co KGaA. doi :10.1002/3527600434.eap231. ISBN 9783527600434.
- Kreyszig, Erwin (1972), Advanced Engineering Mathematics (3rd ed.), New York: Wiley, ISBN 0-471-50728-8
- Serway, Raymond A.; Jewett, John W. (2003). Physics for Scientists and Engineers. Brooks/Cole. ISBN 0-534-40842-7.
- Tipler, Paul (1998). Physics for Scientists and Engineers: Vol. 1 (4th ed.). W. H. Freeman. ISBN 1-57259-492-6.
- Wylie, C. R. (1975). Advanced Engineering Mathemat ics (4-е изд.). Макгроу-Хилл. ISBN 0-07-072180-7 .
Внешние ссылки
Викискладе есть материалы, связанные с гармоническими осцилляторами . Викицитатник содержит цитаты, связанные с: Гармонический осциллятор - Гармонический осциллятор из Лекции Фейнмана по физике
- , Энциклопедия математики, EMS Press, 2001 [1994]
- Гармонический осциллятор из гипертекстового книги «Хаос»
- Java-апплет гармонического осциллятора с демпфированием, пропорциональным скорости, или демпфированием, вызванным сухим трением
- Затухающий гармонический осциллятор Подробное решение от Beltoforion.de
Осцилляторы в биржевой торговле: что это, виды и основные сигналы

Осциллятор — это, в общем смысле, система в которой наблюдаются колебательные процессы (слово «осциллятор» происходит от латинского oscillare — «качаться»).
Осцилляторы встречаются в совершенно разных областях, от физики до биржевой торговли. Когда говорят об осцилляторах в инвестициях и биржевой торговле, то чаще всего имеют в виду индикаторы технического анализа.
В техническом анализе осцилляторы — это индикаторы, графики которых отображаются по отдельной от ценового графика шкале. Например, цена акции может двигаться в диапазоне от ₽10 000 до ₽20 000, в то время как такие осцилляторы, как RSI и DMI, всегда будут иметь значения только от 0 до 100.
Основные принципы работы осцилляторов
Осцилляторы стали разрабатываться приблизительно с 1930-х годов, вместе с развитием технического анализа. Технический анализ основан на идее, что все, способное повлиять на цену финансового инструмента (макроэкономические условия, финансовые результаты, настроения инвесторов и пр.), уже нашло отражение в рыночной цене. И поскольку все факторы, влияющие на цену, знать и учесть нельзя, трейдеру лучше измерять динамику и диапазоны движения цен.
Наиболее популярные индикаторы и осцилляторы технического анализа разработали в 1970-х годах Уэлс Уайлдер (автор осцилляторов DMI, RSI, ATR), Джеральд Аппель (придумал MACD), Джордж Лэйн (автор стохастического осциллятора), Марк Чайкин (осциллятор Чайкина).
У большинства осцилляторов два основных принципа работы:
Как работает принцип ценовой динамики
В этом случае при построении осциллятора учитываются изменения цены. Принцип работы таких осцилляторов напоминает измерение высоты при движении в гору или под гору в тумане. Например, если через каждые десять шагов вы будете находиться на 2 м выше, это значит, что вы идете вверх по горе с равномерным уклоном. Если через следующие десять шагов вы поднялись уже не на 2 м, а на 3 м, то это значит, что склон стал круче. А если после десяти шагов вы остались на той же высоте, то это значит, что вы вышли на плато.
Как работает принцип диапазона
В основу расчета осциллятора ложится разброс между минимальными, максимальными, начальными или итоговыми значениями цены за какой-то период. Например, когда максимальные значения цен в новом торговом периоде выходят за пределы прежних максимумов или когда цены закрытия находятся у верхней границы диапазона, тогда осцилляторы показывают высокие или растущие значения, что указывает либо на растущий тренд, либо на возможную перекупленность рынка.
Основные сигналы осцилляторов
Осцилляторы могут дать инвестору несколько типов сигналов, что выгодно отличает их, например, от графических индикаторов следования за ценой, таких как скользящие средние.
- Пересечение сигнального уровня (например 0,50 или специальной сигнальной линии).
- Нахождение в зоне перекупленности или перепроданности (overbought or oversold zone), а также выход из этой зоны.
- Дивергенция (расхождение) динамики осциллятора с ценовой динамикой.
- Пересечение уровня поддержки или сопротивления.
Пересечение сигнального уровня
Многие сигналы осцилляторов лучше работают «в боковике», то есть при отсутствии ярко выраженного ценового тренда. Тем не менее именно осцилляторы могут подтвердить наличие тренда.
Так, если значение осциллятора RSI с 14-дневным периодом пересекает снизу вверх уровень 50, то это может указывать на переход цены инструмента в восходящий тренд. Также тренд может подтверждать смещение уровня диапазона колебаний осциллятора. Так, если разброс колебаний RSI из диапазона 30–70 смещается в сторону 20–60, то это будет говорить о тенденции цены к снижению.
У некоторых осцилляторов, например у стохастического осциллятора и у MACD, торговым сигналом может служить пересечение специальной сигнальной линии, которая является частью графика самого осциллятора.
Зона перекупленности или перепроданности
Если значение осциллятора достигает высоких значений, особенно возле верхней границы шкалы, то это означает, что цена уже высока, покупать инструмент уже рискованно, более того, появляется вероятность скорого разворота цены вниз. Обратным образом обстоит дело, когда значение осциллятора достигает низких уровней. Так, можно определить зоны перекупленности и перепроданности. Например, для индикатора RSI зона перепроданности находится между значениями 0–30, а зона перекупленности — на уровнях 70–100. На самом деле определение таких уровней требует некоторой настройки и уровни overbouht и oversold могут изменяться в зависимости в ситуации на рынке.
Например, как в рассмотренном ранее примере, если разброс колебаний осциллятора RSI находится между значениями 20 и 60, то, скорее всего, зона перепроданности снизится до диапазона 0–25, а уровень перекупленности может начинаться на значениях выше 60.
Для осцилляторов, которые не имеют изначальной строгой шкалы колебаний, например такой как Momentum, зоны перекупленности и перепроданности могут определяться только статистически.
Сигналом к действию считается возвращение значения осциллятора из зоны перекупленности или перепроданности.
Дивергенция
Дивергенция (или расхождение) наблюдается тогда, когда цена инструмента (акции, биржевого товара) достигает новых максимумов или минимумов, а значение осциллятора снижается или, наоборот, повышается относительно предыдущих рекордов. Например, когда цена акции растет все выше, а значение осциллятора ниже предыдущего максимума — это пример «медвежьей» дивергенции. Появление «медвежьей» дивергенции говорит о возможном развороте цены от роста к снижению.
«Бычья» дивергенция наблюдается тогда, когда цена инструмента достигает новых минимумов, а осциллятор в то же время начинает подрастать. Это может быть сигналом с развороту котировок от снижения к росту.
Если не вдаваться в дебри дифференциальной алгебры, математически объясняющей принцип работы дивергенции, то дивергенцию можно объяснить на примере горы. Например, вы идете вверх по холму и склон становится более пологим. Это вполне может означать, что скоро вы достигните вершины, а потом начнете спуск. А пока с каждым шагом вы будете продолжать идти вверх (продолжение роста цены), но ваш подъем по высоте с каждым шагом будет становиться меньше (снижение значения осциллятора от максимумов). Это и есть дивергенция.
Важно помнить, что после пологого участка подъем вновь может стать более крутым. Поэтому дивергенция не сигнализирует смену тренда, а только указывает на вероятность его прекращения.
Поддержка и сопротивление
Когда цена достигает определенного значения, а потом какое-то время не может его преодолеть, то говорят, что цена достигла уровня поддержки (при снижении цены) или сопротивления (при росте цены). Преодоление уровней сопротивления или поддержки само по себе часто служит торговым сигналом, указывая на то, куда будут двигаться котировки дальше.
Все это можно наблюдать и на графике осциллятора. Преодоление уровня сопротивления или поддержки может быть сигналом к покупке или к продаже актива соответственно. Причем на графике осцилляторов такие прорывы наблюдаются с опережением по сравнению с прорывами на графике самого инструмента.
Основные виды осцилляторов
Одними из самых распространенных индикаторов, построенных на принципе ценовой динамики, можно назвать:
- скорость изменений (Rate of change);
- схождение-расхождение скользящих средних (MACD);
- индекс относительной силы (RSI).
Скорость изменений, или Momentum
Осциллятор скорости изменений (Rate of change) больше известен под названием Momentum. Он является, наверное, наиболее простым осциллятором, построенным на ценовой динамике финансового инструмента. Принцип расчета осциллятора — сравнить последнюю цену с ценой некоторое время назад. Из-за того что у разных инструментов разная стоимость, для универсального использования осциллятора он рассчитывается в процентах.
Формула расчета значений осциллятора Momentum выглядит так:
M = 100%* (P — P c-n )/P c-n ,
где
P — текущая цена,
P c-n — цена закрытия n дней назад.Сигнальным уровнем, пересечение которого дает сигнал к смене тренда, при такой формуле является 0.
Зоны перекупленности и перепроданности определяются эмпирически.
Пример дивергенции индекса S&P 500 и осциллятора Momentum (Фото: Tradingview)
Главным преимуществом осциллятора является простота расчета и настройки. Изменяемый параметр при настройке — временной шаг.
Главный недостаток — сильная зависимость от старой цены. Допустим, на рынке наблюдался всплеск цен, который давал торговый сигнал на осцилляторе. Но через число дней n осциллятор даже при спокойном рынке покажет резкий скачок из-за того, что цена прошлого всплеска попадет в формулу расчета уже в качестве цены P c-n . Такие скачки вносят сильные искажения в значения осциллятора.MACD
Чтобы устранить влияние прошлых цен, можно сравнивать текущую цену не с отдельной ценой в прошлом, а с усредненным значением. Кроме того, более устойчивую тенденцию можно выявить, если сравнивать, например, среднее значение за короткий период со средним значением за более длительный период.
Однако из-за того что средние значения изменяются с большим запозданием, чем текущая цена, можно пропустить нужный момент покупки или продажи.
Для решения этих двух проблем — влияния старых цен и запаздывания средних величин — был придуман выход. Сигналом к действиям становится не пересечение средних цен (что выглядит как пересечение нулевого уровня на осцилляторе), а тенденция к схождению или расхождению скользящих средних. Так был разработан осциллятор схождения-расхождения скользящих средних, или MACD (Moving average convergence-divergence). Наилучшего эффекта осциллятор достигает при использовании средних значений, сглаженных экспоненциально.
Экспоненциальное сглаживание — это способ расчета средней взвешенной за период n, при котором последнему значению придается вес, равный 1/n, а оставшийся вес (n-1)/n придается предыдущему значению скользящей средней. Не стоит вдаваться в дальнейшие подробности. Главное в таком расчете понимать, что прошлые значения со временем плавно теряют свой вес.
Для того чтобы тенденция схождения была подтверждена, помимо графика разницы средних значений (основная «быстрая» линия) в осцилляторе MACD используют еще усреднение этой разницы (сигнальная «медленная» линия). Разница между основной и сигнальной линиями отображается на осцилляторе столбцами гистограммы.

Пример MACD с указанием торговых сигналов и примерами дивергенции (Фото: Tradingview)
Допустим, что после долгого снижения цена переходит в растущий тренд. В этом случае цена останется ниже, чем более инертные средние значения. Но разница между средними начнет непременно уменьшаться. На графике MACD это будет выглядеть как разворот вверх основной линии.
Формула расчета MACD:
ML = P12d ema -P26d ema
SL = ML9d ema
C = ML-SL,где
ML — основная линия (Main line),
P12d ema — 12-дневная экспоненциальная скользящая средняя цены,
P26d ema — 26-дневная экспоненциальная скользящая средняя цены,
SL — сигнальная линия (Signal line),
ML9d ema — 9-дневная экспоненциальная скользящая средняя основной линии,
C — величина столбца гистограммы осциллятора.Сигналом к покупке или к продаже будет служить пересечение основной линией сигнальной. При этом пересечение основной линией сигнальной всегда совпадает с изменением направления гистограмм на графике с минуса на плюс или с плюса на минус. Поэтому таким же сигналом к покупке или к продаже будет смена направления столбцов гистограммы.
Уровни перекупленности и перепроданности определяются эмпирически.
Снижение положительных значений или рост отрицательных значений гистограммы может указывать на замедление соответствующего тренда.
Уровни сопротивления и поддержки, уровни перекупленности и перепроданности, а также дивергенции могут определяться как по гистограмме, так и по основной линии. Сигналы гистограммы будут опережать сигналы по линиям. С другой стороны, доля ложных сигналов по гистограмме будет больше сигналов по линиям.
Преимущество осциллятора — разнообразие торговых сигналов.
Недостатки осциллятора — сложность расчета и интерпретации.RSI
Индекс относительной силы (Relative strength index, RSI) также полностью лишен недостатка осциллятора Momentum. На изменение значения RSI влияет только текущее изменение цены.
При расчете RSI соотносятся усредненные движения котировок вверх с усредненными движениями котировок вниз. Путем пересчета соотношение движений располагается на шкале от 0 до 100. Если RSI равно 50, то это означает, что средняя величина роста цены сравнялась со средней величиной снижения.
Формула расчета RSI выглядит так:
RSI = 100 — 100/ (1 + Up ema /Down ema ),
где
Up ema — средний рост цены за период n, сглаженный экспоненциально,
Down ema — среднее снижение цены за период n, сглаженное экспоненциально.Сигнальный уровень — 50.
Зона перекупленности — 70–100
Зона перепроданности — 0–30.
Рекомендуется статистическая настройка перекупленности и перепроданности.
Пример RSI вместе с ценовым графиком (Фото: Investopuedia / Sabrina Jiang)
Преимущество — простота расчета и интерпретации.
Искажающие недостатки — отсутствуют.Среди осцилляторов, построенных на ценовых диапазонах, можно назвать такие, как:
- стохастический осциллятор (Stochastic oscillator);
- индикатор среднего истинного диапазона (ATR);
- индекс направленного движения (DMI);
- осциллятор Чайкина (Chaikin oscillator).
Стохастический осциллятор
Стохастический осциллятор строится на определении места текущей цены инструмента в ценовом диапазоне между максимумом и минимумом за определенный период. Принцип следующий: допустим, минимальная цена за период была ₽100, максимальная — ₽200, а текущая цена — ₽180. Так как нижняя граница ценового диапазона принимается за 0, текущая цена располагается на уровне 80%. Если значение осциллятора растет и приближается к 100%, то, вероятнее всего, мы имеем, восходящий тренд. Когда значение осциллятора после этого начнет снижаться, это будет означать возможную смену тренда.
В действительности, чтобы избежать колебаний, связанных с вхождением и выходом крайних цен из временного окна осциллятора и для закрепления устойчивости значений, на практике применяют фильтрацию с помощью скользящих средних.
Формула расчета стохастического осциллятора выглядит так:
%K = 100%* (C-L n )/ (H n -L n )
%D=%K 3ma ,где
%K — основное значение осциллятора,
C — текущая цена,
Ln — минимальное значение цены за период n,
Hn — максимальное значение цены за период n,
%D — значение сигнальной линии,
K 3ma — трехдневная скользящая средняя основного значения осциллятора.Сигнал к покупке или продаже — пересечение линией осциллятора сигнальной линии
Зона перекупленности — 80–100
Зона перепроданности — 0–20.
Пример стохастического осциллятора с указанием торговых сигналов и дивергенции (Фото: Tradingview)
Преимущество — простота расчета и интерпретации.
Недостаток — многочисленные ложные сигналы.ATR
Индикатор среднего истинного диапазона (ATR) — это осциллятор, построенный на ценовых диапазонах, с помощью которого можно измерить силу тренда.
Ключевым элементом осциллятора является понятие истинного диапазона (True range). В качестве истинного диапазона выбирается максимальное абсолютное значение из трех величин:
- Разница между максимальной и минимальной ценой в течение последнего торгового дня (H-L);
- Разница между максимальной ценой и ценой вчерашнего закрытия (H-C p );
- Разница между минимальной ценой и ценой вчерашнего закрытия (L-C p ).
Значение осциллятора ATR считается как экспоненциальная средняя истинного диапазона за период n:
Осциллятор показывает только уровень волатильности либо силы тренда без указания его направления. Низкое значение ATR говорит об отсутствии значительных изменений цены, а растущее или высокое значение осциллятора сообщает о наличии волатильности или тренда. Но для того чтобы понять, что в реальности происходит, необходимо сверяться с графиком цены или с другими индикаторами.
Поэтому осциллятор не дает четких однозначных и самостоятельных сигналов для открытия позиции. Тем не менее в качестве сигнала на покупку можно использовать момент, когда ATR начинает расти вместе с увеличением цены. Если ATR прекращает рост, то это может быть знаком для закрытия позиции.
Сигналом на продажу может стать рост ATR при одновременном снижении цены.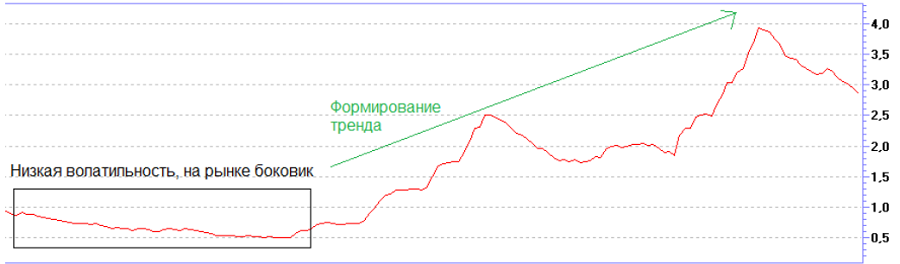
Пример сигнала начала тренда на осцилляторе ATR (Фото: BCS EXPRESS)
Преимущество — относительная простота расчета.
Недостатки — дает сигналы только на начало и завершение движения цены без указания направления.DMI
Индекс направленного движения (Direction Movement Index) строится на ценовых диапазонах и позволяет определить направление и силу тренда.
DMI — осциллятор для тех инвесторов, которые любят входить в рынок только при наличии четкого тренда.
Для этого при построении осциллятора измеряются «выступы» ценового диапазона за пределы диапазона предыдущего торгового дня. Усредненное значение «выступов» вверх (SPDM) соотносится с ATR. Так определяется индекс положительного направления (DI + ). Деление усредненного значения «выступов» вниз (SMDM) на ATR дает индекс отрицательного направления (DI — ).
DI + = SPDM/ATR
DI — = SMDM/ATRЕсли DI + больше, чем DI — , то, вероятнее всего, на рынке восходящий тренд. Если DI + меньше DI — , то наиболее вероятен нисходящий тренд.
А вот наличие тренда и сила тренда определяются с помощью экспоненциально усредненного показателя направленного движения (ADX).

Пример осциллятора DMI на основе значения Индекса МосБиржи (Фото: Tradingview)
Сам показатель направленного движения (DX) считается как отношение разницы DI + и DI — к их суммарному значению:
ADX = EMA (DX) = EMA ( (DI + — DI — )/ (DI + + DI — ) )
Сигнал на открытие длинной позиции — DI+ поднимается над DI- при растущем ADX.
Сигнал на открытие короткой позиции — DI+ опускается ниже DI- при растущем ADX.
Сигнал на начало закрытия позиций — снижение ADX.
Преимущество осциллятора — удобная интерпретация и небольшая доля ложных сигналов.
Недостатки осциллятора — сложная система расчета.Осциллятор Чайкина
Осциллятор Чайкина наряду с ценовыми диапазонами учитывает еще объем торгов. Логика работы осциллятора такая: если итоговая цена торговли выше середины диапазона, то в этот день происходило накопление актива (Accumulation, A). Чем выше от минимума и чем ближе к максимуму цена закрытия, а главное, чем больше при этом был объем торгов, тем накопление больше. Если цена закрытия ниже середины диапазона, то в этот день происходило распределение актива (Distribution). Чем ближе к минимуму и дальше от максимума, а главное, чем больше при этом объем торгов, тем больше было распределение. Если определить нужные диапазоны и объем торгов, то можно рассчитать индикатор накопления/распределения (A/D). Этот индикатор, кстати, является отдельным инструментом теханализа и отображается как осциллятор. Но Чайкин пошел дальше. Чтобы устранить проблему выбывающих данных, он предложил использовать способ, который мы уже рассматривали на примере индикатора MACD — считать разницу между экспоненциальными скользящими средними.
Формула значения осциллятора Чайкина выглядит так:
CHO = EMA (A/D) S — EMA (A/D) L ,
где
EMA (A/D) S — экспоненциально сглаженное среднее значение (A/D) за короткий период (обычно за три дня),
EMA (A/D) L — экспоненциально сглаженное среднее значение (A/D) за длинный период (обычно за десять дней).где
V — объем торгов,
C — цена закрытия,
H — максимальная цена торгов,
L — минимальная цена торгов.Сигнальная линия осциллятора — 0.
Основной торговый сигнал осциллятора — дивергенция.
Осциллятор Чайкина и котировки акций Tesla
Преимущества осциллятора — учет объема торгов.
Недостатки — запаздывание торгового сигнала пересечения нулевого уровня.Плюсы и минусы осцилляторов
Подводя итоги, следует напомнить, что использование осцилляторов имеет свои плюсы и минусы. К достоинствам осцилляторов можно отнести:
- наглядность;
- разнообразие сигналов;
- опережающий характер сигналов;
- возможность более точной настройки осцилляторов под инструмент.
В качестве главных недостатков можно указать:
- сложность расчетов;
- значительную долю преждевременных или ложных сигналов;
- неоднозначность и сложность интерпретации некоторых сигналов.
Настоящая заметка носит исключительно ознакомительный характер и не содержит готовых торговых рекомендаций
Узнайте о возможностях нашего Каталога в телеграм-канале «РБК Инвестиций»
Изменчивость цены в определенный промежуток времени. Финансовый показатель в управлении финансовыми рисками. Характеризует тенденцию изменчивости цены – резкое падение или рост приводит к росту волатильности. Подробнее