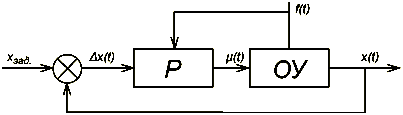
Объекты автоматического регулирования
Объект автоматического регулирования наряду с автоматическим регулятором является важнейшей составной частью САР. При этом объект регулирования является, как правило, неизменяемой частью системы, так как его характеристики определяются технологическим процессом. Естественно, что свойства объекта регулирования имеют решающее значение при конструировании САР.
Свойства промышленных объектов, которые встречаются при решении задач автоматизации, могут быть самыми различными. Однако у всех промышленных объектов есть некоторые общие свойства. Во всех технологических процессах различные формы энергии или вещества, поступающие в процесс, регулируются с тем, чтобы поддержать регулируемую величину па заданном уровне. Во всех процессах имеются постоянные энергетический и материальный балансы, нарушение которых вызывает отклонение регулируемых параметров от заданных значений.
Нагрузкой объекта регулирования Q называют приход или расход рабочей среды — энергии либо вещества. Очевидно, что чем меньше изменяется нагрузка объекта, тем меньшим колебаниям подвергается регулируемый параметр.
Многие объекты обладают способностью аккумулировать рабочую среду, запасать се внутри объекта. Такую способность называют аккумулирующей способностью или емкостью объекта. Чем меньше емкость объекта, тем больше скорость изменения регулируемой величины при нарушении баланса между притоком и расходом рабочей среды и, следовательно, тем сложнее регулирование.
Обычно вместо емкости объекта используют термин «коэффициент емкости», который представляет собой отношение емкости к соответствующему значению регулируемой величины.
Объекты регулирования по числу емкостей подразделяют на одноемкостные и многоемкостные. Многоемкостные объекты характеризуются наличном нескольких емкостей, отделенных одна от другой сопротивлениями, препятствующими переходу рабочей среды из одной емкости в другую.
Количественно динамические свойства объектов регулирования могут отличаться одно от другого, но качественно можно выделить две группы объектов с одинаковыми динамическими свойствами: с самовыравниванием и без самовыравнивания.
Самовыравниванием называют свойство объекта, в результате которого возникшее несоответствие между притоком и расходом рабочей среды самостоятельно, без участия регулятора, стремится к нулю, а регулируемая величина — к новому установившемуся значению.
Количественно явление самовыравнивания характеризуется степенью самовыравнивання р, равной отношению величины возмущения к отклонению регулируемого параметра, выраженных в относительных единицах:

Объекты, в которых при возмущении регулируемый параметр изменяется неограниченно и устанавливается лишь постоянная скорость его изменении, называют нейтральным или астатическим (р=0). Нейтральные объекты могут быть представлены интегрирующими звеньями.
Объекты, в которых любое возмущение вызывает неограниченное отклонение параметра с возрастающей скоростью, называют неустойчивыми (р<0).
Коэффициентом усилении или передачи объекта Kоб называют величину, обратную степени самовыравнивания.
Величины р и Коб характеризуют статические свойства объекта и могут быть определены из его статических характеристик.
К величинам, характеризующим динамические свойства объектов регулирования, относятся: время разгона, постоянная времени и скорость разгона.
Временем разгона объекта Т называют продолжительность процесса самовыравнивания при единичном начальном возмущающем воздействии, в течение которого, начиная от нули, регулируемая величина достигает своего номинального значении.
Постоянная времени объекта Та — это условное время изменения выходной величины от начального до номинального значения, если бы это изменение происходило с постоянной и максимальной для данного переходного процесса скоростью.
Скорость разгона объекта или чувствительность объекта к возмущению является величиной, обратной постоянной времени объекта.
Запаздыванием называют отставание но времени начала изменения регулируемого параметра от момента возмущения. Величина запаздывания складывается из чистого (транспортного) и емкостного (переходного) запаздываний.
Что такое объект регулирования в автоматизации
13.1 Объект регулирования
Объект регулирования является основным устройством САР, ради чего и строится система регулирования. Он имеет определённые свойства и параметры, которые надо учитывать при выборе регулятора.
Ёмкость объекта , характеризует его способность накапливать вещество или энергию. Чем больше ёмкость, тем больше инерционность объекта. Различают:
-одноёмкостные объекты, у них отсутствует запаздывание τ = 0 .
-многоёмкостные объекты, у них имеется запаздывание и чем больше емкостей, тем больше запаздывание.
Реальные объекты в основном многоёмкостные. Например, у эл. печи нагреватель — первая ёмкость, нагреваемый объём — вторая ёмкость.
Саморегулирование (самовыравнивание), характеризует способность объекта восстанавливать состояние равновесия, при этом параметр принимает новое равновесное состояние. Объекты без саморегулирования (самовыравнивания) этой способностью не обладают, т.е. параметр будет неограниченно изменятся (у реального объекта до конечного положения, где сработает ограничитель). В основном большинство технологических объектов — это объекты с самовыравниванием.
Параметры объекта :
τ – время запаздывания , характеризует запаздывание изменения регулируемого параметра при возникновении регулирующего воздействия или возмущения. Увеличение τ , затрудняет работу регулятора, ухудшает устойчивость.
T 0 – постоянная времени объекта, мера инертности объекта, чем больше T 0 , тем медленнее изменяется регулируемый параметр, тем легче работать регулятору.

– коэффициент передачи объекта, показывает, как изменяется параметр Х при изменении регулирующего воздействия Y или возмущения Z, при этом коэффициент передачи объекта по Y и по Z может быть разным. Чем больше Ко, тем объект чувствительнее к воздействиям.
Эти параметры определяются по переходным характеристикам объекта, которые приведены на Рис. 90 и Рис. 92.
Объект с саморегулированием (самовыравниванием) Рис. 89 .


τ — время запаздывания,
T0 — постоянная времени объекта,
QUOTE – коэффициент передачи объекта,
Y – входная величина действующая на объект (регулирующ e е воздействие),
X – выходная величина объекта (регулируемый параметр — скорость вращения).
Этот объект представляет собой инерционное типовое звено.
Объект без саморегулирования (Рис. 91 ).
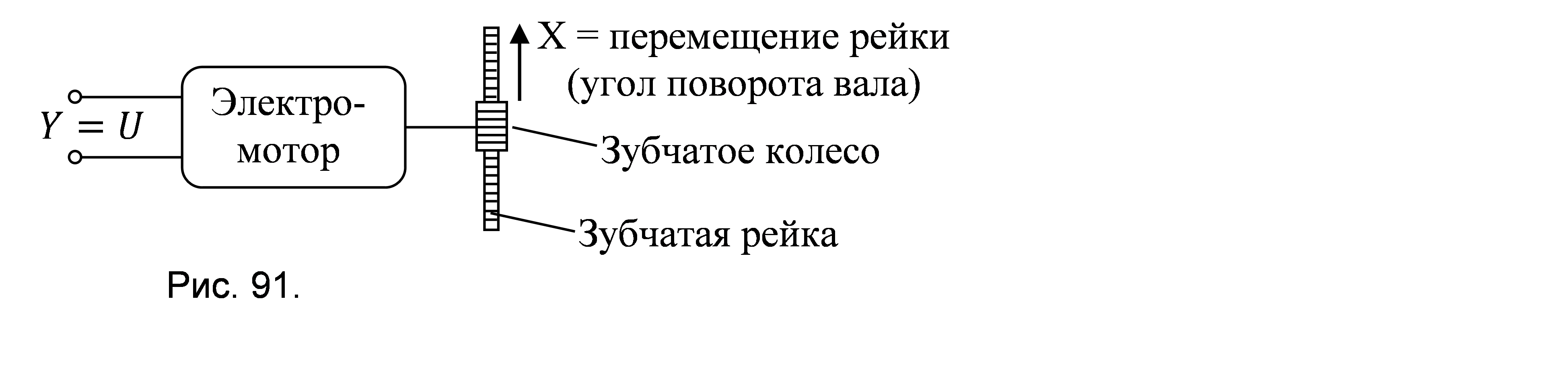


– скорость нарастания Х .
Если Y =∆ y увеличивается, то скорость перемещения рейки tanα увеличивается
τ – время запаздывания
T 0 – постоянная времени объекта
Этот объект представляет собой интегрирующее типовое звено.
Контрольные вопросы
1.Объеты: комнатный радиатор и каменная печь для обогрева, у какого из них T 0 больше.
2.Объект газопровод, если диаметр трубы увеличить , как изменятся T 0, τ о и Ко объекта.
3.Печь, какой это объект- с самовыравниванием или без.
Основные характеристики объектов управления
Управлением называется процесс целенаправленного воздействия на систему, обеспечивающий повышение ее организованности, достижение того или иного полезного эффекта. Любая система управления разделяется на управляющую и управляемую подсистемы. Связь от управляющей подсистемы к управляемой называется прямой связью. Противоположная по направлению связь называется обратной. Понятие обратной связи является фундаментальным в технике, природе и обществе. Считается, что управление без обратной связи не эффективно, т. к. не обладает способностью к самовыявлению ошибок, формулировке проблем, не позволяет использовать возможности саморегулирования системы, а также опыт и знания специалистов. Обратная связь воздействует на систему. Воздействие — есть средство изменения существующего состояния системы путем возбуждения силы, позволяющей это сделать
В системах регулирования, замкнутых по отклонению, регулирование начинается тогда, когда произошло какое-либо изменение регулируемого параметра. Это выглядит, как тушение пожара. Однако при таком регулировании учитываются любые возмущения, независимо от их природы, которые повлекли за собой изменение регулируемого параметра. Однако, регулируемый параметр обязательно отклонится от заданного параметра и время приведения его в порядок зависит от инерционности объекта. Что это такое?
В системах с регулированием по возмущению регулируемый параметр практически не отклоняется от заданного значения благодаря тому, что она компенсирует возмущение еще до того, как оно приведет к изменению регулируемого параметра. Однако, если таких возмущений несколько, то необходимо организовать несколько систем регулирования, на каждое возмущение. Если соединить эти системы, то можно получить идеальный вариант.
Все объекты управления можно поделить на:
- устойчивые — с самовыравниванием,
- неустойчивые — без самовыравнивания.
Каждый объект – это физический процесс или процессы, которые в общей ситуации поддаются описанию математическими формулами. Но есть несколько параметров у каждого объекта – это устойчивость и инерционность.
Остановимся подробнее на терминах. Представим шарик в ямке. Выведем его из равновесия путем качения вверх, к краю ямки. Таким образом, мы приложим к шарику внешнее возмущение. Если отпустить шарик, он, покатавшись несколько раз, вернется на дно. Такой объект принято называть устойчивым или с самовыравниванием.А теперь представим себе шарик уже не в ямке, а на горке. Приложим к нему внешнее возмущение. Шарик без внешней помощи назад не вернется. Такой объект называется неустойчивым или без самовыравнивания.
Существует понятие степени устойчивости – т.е. в первом случае шарик можно отклонить настолько, что он просто выскочит из ямки. В другом же случае можно приложить недостаточно усилия и шарик не скатиться, а останется лежать на горке.Таким образом, делаем вывод, что удержать значение параметра с самовыравниванием можно и без системы регулирования. А вот объект без самовыравнивания не может работать без такой системы.
Практически все технологические объекты – это объекты с самовыравниванием.
Одна из основных характеристик объектов — это инерционность.
Пример: кипятим воду в чайнике. Вода закипела. Мы выключили конфорку, а вода еще какое-то время кипит, потом успокаивается и начинает остывать. Вот это некоторое время кипения после выключения и определяет инерционность чайника с водой.
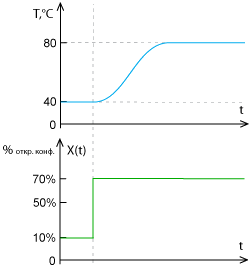
Перейдем к графикам.
Чайник – это объект управления, конфорка – регулирующий орган. На графике изображен процесс изменения температуры воды, при котором мы поднимем температуру с 40°С до 80°С путем мгновенного открытия конфорки.
Теперь вернемся к системам регулирования.
Если при регулировании в системе отопления, включить в каких-то помещениях обогреватели, то система регулирования должна уменьшить количество тепла, приводимого в данное здание путем прикрытия клапана на теплоносителе.
Если при регулировании в системе отопления повысилась температура наружного воздуха, то при этом уменьшились потери через ограждающие конструкции, то система регулирования тоже прикроет клапан. В первом случае к реакции систему регулирования привело в действие внутреннее возмущение, а во втором – внешнее. Часто на объект воздействуют как внутренние, так и внешние возмущения.
Существуют различные схемы, с помощью которых можно регулировать: системы с внешними и внутренними возмущающими воздействиями.
Большинство объектов с внутренними возмущениями регулируют с помощью автоматизированной системы регулирования.
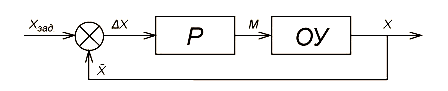
Такие системы называют замкнутыми с регулированием по отклонению.
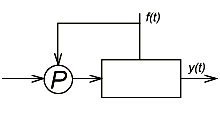
Схема, в которой происходит регулирование только по внешнему воздействию, называется разомкнутой с регулированием по возмущению.
Однако в системах регулирования чаще всего встречаются или замкнутые системы, или комбинация замкнутых и разомкнутых систем, которые называются – комбинированные. Они выглядят так:
Классическим примером таких схем является регулирование температуры подающего или обратного теплоносителя с коррекцией по температуре наружного воздуха. Наличие цифровой техники позволило свести в таблицу сетевой график и записать эту таблицу в прибор. При наличии аналоговой техники получим комбинированную систему, которая работает следующим образом – внутри поддерживается заданная температура среды, а в зависимости от изменений температуры наружного воздуха, происходит смещение (вверх или вниз) поддерживаемого параметра.
Литература:
1. Айзерман М. А. Лекции по ТАУ. Гостехиздат, 1966г.
2. Иващенко Н. Н. Автоматическое регулирование. Машгиз.1958г.
3. Школа автоматчиков. УРОК №5. Основы автоматизации
4. Автоматизация производства и промышленная электроника. Энциклопедия. Под ред. А. И. Берга. и В. А. Трапезника. М.1962-1965г
Подпишитесь на нашу емей рассылку и всегда будьте в курсе последних поставок и новостей
ООО «РемСтройТехно-Сервис» — эксклюзивный поставщик оборудования для измерения расходов различных сред, регулирующих клапанов , а также оборудования для систем HVAC.
Глава 15. Объекты регулирования и их свойства
Объект регулирования является основной частью системы автоматического регулирования, свойства которого оказывают влияние на качество регулирования и выбор типа регулятора.
К наиболее распространенным объектам регулирования в литейных и термических цехах относятся тепловые устройства (плавильные, нагревательные и сушильные печи), в которых требуется регулировать температуру, расход воздуха, топлива или электрической энергии; установки по приготовлению формовых и стержневых смесей; установки для получения контролируемых атмосфер, где необходимо регулировать одновременно температуру, влажность или состав газовой фазы, и т. д.
Любой объект регулирования характеризуется количеством энергии или вещества, проходящего через него. Режим работы объекта определяется протекающими внутренними процессами, на характер которых влияют внешние воздействия. В системе автоматического регулирования часть внешних воздействий дает ей информацию о задачах регулирования. Поэтому их называют полезными (регулирующими) воздействиями. Они либо вырабатываются регулятором, либо задаются оператором. Воздействия на объект, не связанные с задачей регулирования, называют возмущениями. Именно из-за существования возмущений возникает необходимость регулирования. Природа возмущений всегда носит случайный характер. Например, это может быть понижение температуры нагревательной или плавильной печей из-за случайного открытия дверки, увеличение запыленности воздуха из-за открытия въездных ворот и т. п.
Если объект имеет одну регулируемую величину, то он относится к простым, или одномерным; при наличии нескольких регулируемых величин его называют многомерным.
Различают два вида объектов регулирования: стационарные, у которых характеристики не изменяются во времени или изменяются незначительно, и нестационарные, характеристики которых изменяются во времени.
В качестве примера объекта регулирования рассмотрим лабораторную нагревательную печь, у которой регулируемой величиной является температура рабочего пространства. К числу внешних возмущений этого объекта относится масса загруженных образцов, частота открытия загрузочной дверки, колебания напряжения электропечи.
Следовательно, объект регулирования – это устройство, заданный режим которого должен поддерживаться регулирующими воздействиями регулятора извне. Для создания системы регулирования необходимы четкие представления о свойствах объекта. Знание этих свойств необходимо также и для выбора технических средств измерения контролируемых и регулируемых величин, элементов регуляторов и их настроек.
2. Параметры объектов регулирования
К основным параметрам, определяющим свойства объектов регулирования, относятся: нагрузка, емкость, самовыравнивание, инерционность и запаздывание, время разгона и постоянная времени объекта.
Нагрузка. Любой объект регулирования характеризуется нагрузкой, т. е. количеством энергии или вещества, которое расходуется в этом объекте для проведения заданного технологического процесса, например количеством топлива, подаваемого. К горелкам печей, количеством электроэнергии, подводимой к электродам дуговых плавильных печей, и т. п.
Нагрузка характеризует производительность или пропускную способность объекта при установившемся состоянии контролируемого процесса.
Значительные колебания нагрузки вызывают изменения регулируемой величины. Однако для процесса регулирования имеет значение не абсолютное значение нагрузки, а диапазон и характер ее изменения во времени. Чем медленнее изменяется нагрузка и чем меньше ее диапазон, тем легче регулировать объект, и наоборот.
Емкость. Подавляющее большинство видов оборудования литейных и термических цехов (плавильные и нагревательные печи, охлаждающие баки, сушильные установки и т. д.) способны накапливать (аккумулировать) энергию и вещество. Такое накопление возможно благодаря тому, что в каждом объекте имеется сопротивление выходу энергии и вещества (кладка печи, заслонка и шибер и т. д.).
Емкостью регулируемого объекта называют запас накопленной энергии или вещества. Так, например, при, регулировании температуры плавильной печи ее емкость по отношению к регулируемой величине (температуре) будет характеризоваться количеством тепла, накопленном в кладке, в жидком металле и в газах, заполняющих рабочее пространство печи.
Емкость объекта зависит от его размеров. Так, например, при регулировании уровня жидкости в закалочном баке емкость объекта зависит от вместимости бака. Чем больше вместимость бака, тем медленнее будет изменяться уровень при нарушении соответствия между приходом и расходом жидкости. В объекте с большей емкостью регулируемая величина при возмущении медленнее изменяет свое значение, и регулирование протекает более устойчиво.
Однако понятие емкости не позволяет правильно оценить ее влияние на изменение регулируемой величины, поэтому вводят понятие о коэффициенте емкости.
Коэффициент емкости – это количество энергии или вещества, которое необходимо подвести в объект или отвести от объекта, с тем чтобы изменить регулируемую величину на единицу времени. Например, при регулировании уровня жидкости в закалочном баке коэффициент емкости – это количество жидкости, которое необходимо добавить в бак, чтобы уровень жидкости изменился на единицу измерения.
Чем больше коэффициент емкости, тем больше емкость объекта, тем медленнее изменяется регулируемая величина, т. е. меньше чувствительность объекта К возмущениям, и наоборот.
В общем виде коэффициент емкости К с можно представить как отношение емкости объекта С к значению регулируемой величины X:

Коэффициент емкости может быть постоянной или переменной величиной; в последнем случае коэффициент емкости определяют как отношение изменения емкости к соответствующему изменению регулируемой величины:
Величину, обратную коэффициенту емкости, называют чувствительностью объекта к возмущению.
Различают безъемкостные, одноемкостные и многоемкостные объекты.
К безъемкостным объектам относят объекты с очень малой вместимостью (например, небольшие трубопроводы).
Одноемкостные объекты – такие объекты, у которых нарушение равновесия между подачей и потреблением вызывает одновременные и одинаковые изменения регулируемой величины во всех точках емкости.
Многоемкостные объекты – это те объекты, в которых имеются две или более емкостей, разделенных между собой термическими, гидравлическими или электрическими сопротивлениями. Примером двухъемкостного объекта может служить термическая печь, у которой одна емкость – рабочее пространство – отделена от второй (где находятся нагревательные элементы) термическим сопротивлением (металлическим муфелем). Другим примером двухъемкостного объекта является, тигельная плавильная печь.
Многоемкостные объекты сложно регулировать, так как они характеризуются так называемым переходным запаздыванием, о чем будет сказано ниже.
Самовыравнивание. Большинство объектов регулирования в литейных и термических цехах обладает свойством самовыравнивания: при внешних возмущениях самостоятельно (без участия регулятора) входить в новый статический режим работы. Таким образом, в объектах с самовыравниванием возникшее несоответствие между приходом и расходом энергии (или вещества) стремится к нулю, а регулируемая величина – к новому установившемуся значению. Например, если к нагревательным элементам электрической печи будет подводиться меньшее напряжение, то температура в ней будет понижаться и стремиться к новому установившемуся значению.
Объекты, обладающие свойством самовыравнивания, называют статическими объектами.
В ряде объектов регулирования нарушение равновесия между подачей и потреблением энергии (или вещества) приводит к непрерывному изменению регулируемой величины в ту или иную сторону. Объекты регулирования, лишенные самовыравнивания, называют астатическими объектами. Примером такого объекта может служить закалочный бак, в который жидкость поступает из трубы, а отводится с помощью насоса. При увеличении подачи жидкости в бак количество отводимой жидкости останется прежним. В результате уровень жидкости будет повышаться, и бак через некоторое время переполнится. Только ручное и автоматическое изменение производительности насоса может привести к восстановлению равновесия и предотвратить переполнение бака.
Регулирование в объектах без самовыравнивания сопряжено с преодолением ряда трудностей, а в отдельных случаях регулирование просто невозможно.
Способность объекта к самовыравниванию характеризуется степенью самовыравнивания ρ:
где q – относительная разность между приходом и расходом вещества или энергии; Х0 = Х/Хн – относительное отклонение регулируемой величины; Хн – номинальное значение регулируемой величины; X – текущее значение регулируемой величины.
Степень самовыравнивания численно равна отношению возмущающего воздействия к отклонению регулируемой величины, вызванному этим воздействием. Чем больше степень самовыравнивания ρ, тем с большей легкостью объект самопроизвольно
восстановит заданное значение величины при кратковременном возмущении и тем быстрее восстановится равновесие и более устойчивым будет процесс регулирования. С увеличением степени самовыравнивания уменьшается время переходного периода в процессе регулирования, т. е. повышается его качество.
Однако степень самовыравнивания объекта не является постоянной, она зависит от нагрузки. С уменьшением нагрузки уменьшается степень самовыравнивания, что затрудняет проведение устойчивого и качественного регулирования.
Инерционность и запаздывание. Большинству объектов регулирования в той или иной степени присущи инерционность и запаздывание. Инерционность объекта характеризует его способность к замедлению накапливать или расходовать энергию (или вещество) в результате наличия сопротивлений. В таком объекте в результате регулирующего воздействия и нарушения равновесия между приходом и расходом энергии (или вещества) регулируемая величина изменяется не мгновенно. Отставание регулируемой величины называется запаздыванием.
Время полного запаздывания τп складывается из двух составляющих: времени транспортного (или чистого) запаздывания τт и времени емкостного (или инерционного) запаздывания τе.
Транспортное запаздывание – это время, в течение которого регулируемая величина не изменяется, несмотря на произведенное регулирующее воздействие. Например, при изменении напряжения на нагревательных элементах электрической печи потребуется определенное время, пока установится новый тепловой поток, что повлияет в конечном итоге на время начала изменения температуры.
Продолжительность транспортного запаздывания зависит от расстояния между регулирующим органом и чувствительном элементом первичного преобразователя, от нагрузки и емкости объекта. Например, транспортное запаздывание уменьшается при расположении термопары в непосредственной близости от нагревательных элементов. Чем больше нагрузка, тем меньше транспортное запаздывание, а чем больше емкость объекта, тем больше время транспортного запаздывания. Такое запаздывание затрудняет регулирование, и следует всегда стремиться к его уменьшению.
Емкостным запаздыванием называется запаздывание, зависящее от термических, гидравлических и других сопротивлений между емкостями объекта. Оно определяется как интервал времени, затраченный на преодоление межъемкостных сопротивлений. Например, в муфельной печи емкостным запаздыванием будет время с момента возникновения теплового потока от нагревательных элементов до момента изменения температуры муфеля.
Емкостное запаздывание тем больше, чем больше число последовательно включенных емкостей и чем больше их значения.
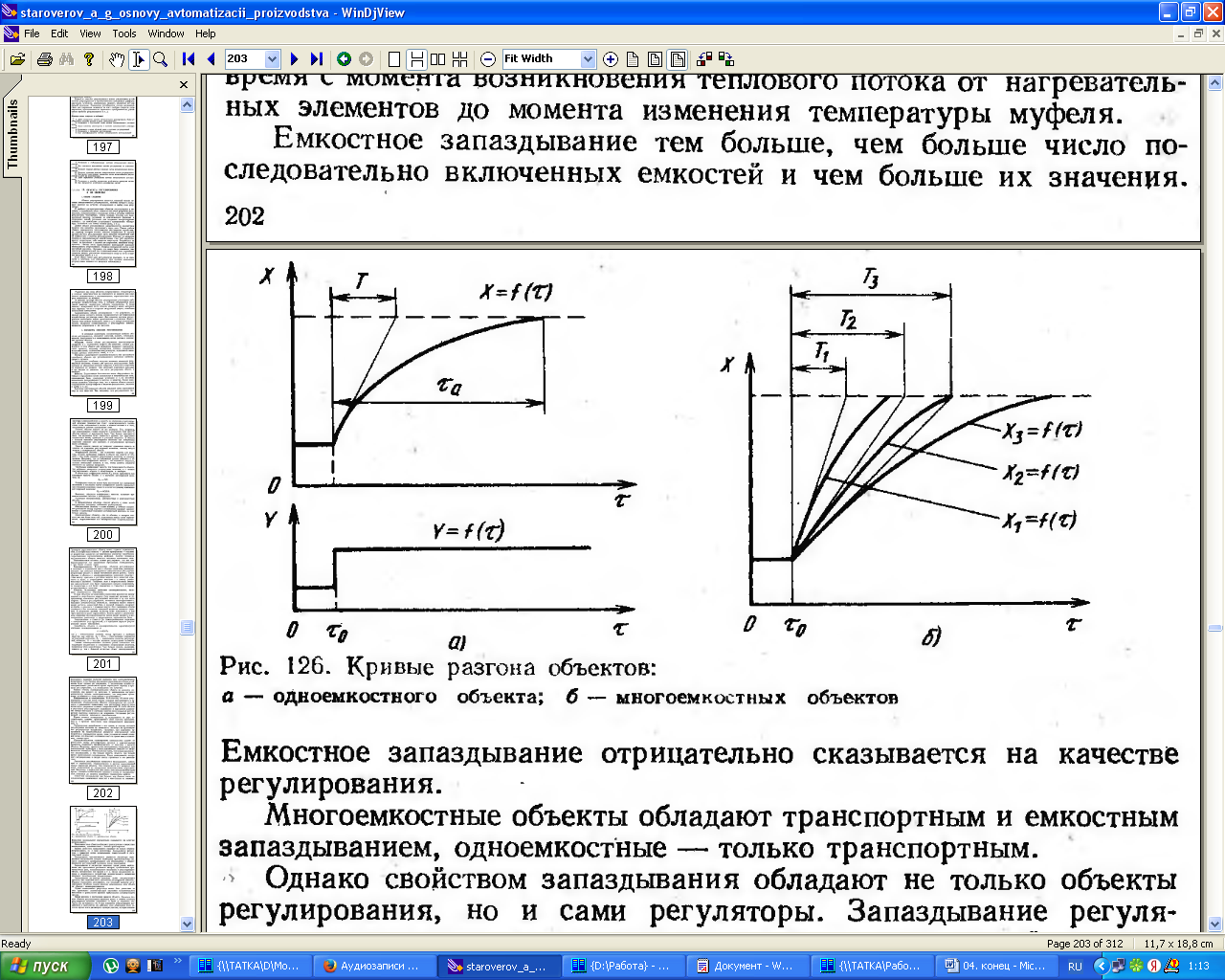
Рис. 126. Кривые разгона объектов:
а – одноемкостного объекта; б – многоемкостных объектов
Емкостное запаздывание отрицательно сказывается на качестве регулирования.
Многоемкостные объекты обладают транспортным и емкостным запаздыванием, одноемкостные – только транспортным.
Однако свойством запаздывания обладают не только объекты регулирования, но и сами регуляторы. Запаздывание регулятора – суммарное время запаздывания измерительной и регулирующей систем.
Запаздывание чувствительных элементов регулятора определяется тем временем, которое необходимо чувствительному элементу первичного преобразователя для обнаружения в объекте изменения регулируемой величины после возмущения.
Запаздывание в регуляторе включает также время, необходимое для преодоления различных зазоров, срабатывания промежуточных реле, исполнительного механизма и регулирующего органа, преодоления сил трения и т. п. Время преодоления зазоров в механических устройствах исполнительного механизма называют запаздыванием корректировки.
Запаздывание регулятора вызывает выбег регулирующего органа и, как следствие этого, отклонение регулируемой величины. Процесс успокоения затягивается, что ухудшает качество регулирования. Особенно опасно влияние запаздывания, если объект не обладает самовыравниванием.
Время запаздывания регулятора может быть уменьшено за счет применения соответствующей настройки исполнительного механизма и уменьшения времени срабатывания регулирующего органа.
Время разгона и постоянная времени объекта. Временем разгона объекта регулирования называют время, в течение которого регулируемая величина изменяется от нуля до заданного значения при мгновенном 100%-ном изменении регулирующего воздействия и постоянстве его действия. Для объяснения этого понятия лучше всего рассмотреть кривую разгона, которая показывает изменение регулируемой величины во времени. Такую кривую можно получить, если скачкообразно изменить регулирующее воздействие и записать изменение регулируемой величины для различных моментов времени.
На рис. 126, а изображена кривая разгона X = f (τ) объекта с самовыравниванием, которая показывает изменение значения регулируемой величины при мгновенном изменении регулирующего воздействия Y. Время разгона та определяется продолжительностью переходного процесса от момента подачи регулирующего воздействия до момента достижения регулируемой величиной максимального значения. Максимальное значение регулируемой величины отличается от установившегося значения не более чем на 1 %.
Время разгона является мерой инерционности объекта. Оно возрастает с увеличением емкости объекта.
Постоянная времени объекта – это время его разгона при отсутствии самовыравнивания. Значение постоянной времени Т объекта можно определить, если провести касательную к начальной точке кривой разгона (рис. 126, а). Отрезок, отсекаемый этой касательной на прямой, параллельной оси абсцисс, представляет собой постоянную времени объекта Т.
Время разгона та и постоянная времени объекта Т связаны между собой соотношением τа = ŋТ, где ŋ – коэффициент нагрузки объекта, который равен отношению нагрузки объекта при рассматриваемом режиме к максимальной .нагрузке.
Постоянная времени объекта Т связана с чувствительностью v и степенью самовыравнивания р соотношением Т = l/(νρ).
На рис. 126, б показаны кривые разгона, объектов с различным числом емкостей. Значения постоянных времени различных объектов неодинаковы. С увеличением числа емкостей увеличивается постоянная времени объекта. А чем она больше, тем хуже поддается объект регулированию.