Как работает регулятор скорости у паровоза

Навигация по сайту ▾
Мир паровозов (Просмотров: 31)
Рождение паровоза (Просмотров: 11)
Телега инженера Кюньё (Просмотров: 8)
Ричард Тревитик – создатель первого паровоза (Просмотров: 19)
Паровоз Брантона (Просмотров: 41)
Три паровоза Джорджа Стефенсона (Просмотров: 42)
Первая в мире железная дорога (Просмотров: 19)
Дорога Манчестер — Ливерпуль (Просмотров: 11)
Рейнхиллские состязания (Просмотров: 12)
Развитие железных дорог в разных странах (Просмотров: 13)
Первые рекорды скорости паровозов (Просмотров: 60)
Комфорт в первых паровозах (Просмотров: 37)
Первые российские магистрали. Паровоз Черепановых (Просмотров: 18)
Паровоз Дмитрия Пермякова (Просмотров: 16)
Сочлененные паровозы системы Ферли (Просмотров: 31)
Паровозы типа 1-3-0 Ливенской железной дороги (Просмотров: 18)
Паровозы типа 2-2-0 Новгородской железной дороги (Просмотров: 12)
Трехпарки Ярославо-Вологодской железной дороги (Просмотров: 27)
Паровозы типа 0-3-0 Новгородской железной дороги (Просмотров: 26)
Паровозы с вертикально расположенным котлом (Просмотров: 19)
Первые узкоколейные паровозы Коломенского завода (Просмотров: 27)
Самые выдающиеся паровозы в истории (Просмотров: 34)
Самые большие паровозы (Просмотров: 56)
Устройство паровоза (Просмотров: 142)
Видео: самые красивые паровозы и пар от них (Просмотров: 7)


Устройство паровоза

Котёл
Котёл состоит из трёх основных частей: топки, цилиндрической части и дымовой коробки.
- Топка. В топке происходит сгорание топлива. Загрузка топлива производилась либо вручную через шуровочное отверстие, закрываемое заслонками, либо, в поздних сериях паровозов, с помощью специального устройства — механического углеподатчика (стокера).
- Зольник (поддувало). Располагается под колосниковой решёткой топки. В зольнике скапливались остатки сгоревшего топлива. Зольник снабжён клапанами для регулировки количества поступающего в топку воздуха. Чистка зольника производилась через специальные отверстия металлическими скребками.
- Цилиндрическая часть. До определённого уровня заполнена водой. Здесь находятся дымогарные трубы, через которые газообразные продукты горения топлива из топки движутся к дымовой коробке, попутно нагревая воду, находящуюся вокруг. Над дымогарными трубами проходят жаровые трубы, внутри которых смонтированы элементы пароперегревателя.
- Пароперегреватель — устройство, состоящее из труб, проходящих через цилиндрическую часть котла, и коллектора, сообщающегося с ними при помощи соединительных трубок. Пароперегреватель повышает температуру пара до 350—400°, что увеличивает КПД паровоза;
- Паровой колпак (сухопарник) — пространство для сбора готового пара в виде выступа наверху цилиндрической части котла. Кроме основного колпака, на паровозе могли устанавливаться дополнительные колпаки, пар из которых питал дополнительные устройства — электрогенератор для фонаря (в поздних сериях) и т. д.;
- Регулятор — прибор, с помощью которого машинист производит впуск пара в машину и изменяет скорость движения паровоза. Регулятор располагается в паровом колпаке и может состоять из одного или двух клапанов. Одноклапанные регуляторы имели очень большое усилие открывания, с которым иногда машинист в одиночку не справлялся. В двухклапаных регуляторах малый клапан помогал открытию большого, что решало эту проблему. Применение малого клапана также позволяло экономить пар — если паровоз шел вхолостую, для движения могло хватить и пара, даваемого только малым клапаном, что даже породило устойчивое выражение — «на малом клапане», т. е. движение тихо, неспешно. В самых мощных советских паровозах серии ФД и ИС количество клапанов доходило до 4—5;
- Паросепаратор (паросушитель) — устройство для отделения пара от капель воды;
- Инжекторы — устройства для подачи свежей воды из тендера в котёл. В отдельных паровозах вместо инжекторов применялись поршневые насосы;
- Дымовая коробка — передняя часть котла, в которой находятся коллектор пароперегревателя, конусное устройство (форсовый конус) и дымовая труба. В дымовой коробке располагают также коллектор, искроуловительные приборы и сифон (паровой прибор для создания разрежения в дымовой коробке при беспарном ходе паровоза). Спереди дымовая коробка закрывается крышкой на петлях, открываемой для очистки дымовой коробки и для выемки труб при ремонте. Для осмотра коробки и её очистки на фронтонном листе имеется дверца меньших размеров;
- Конусное устройство . Выпускает отработанный пар в дымовую трубу, создавая тягу в топке. В некторых паровозах величина отверстия конусного устройства могла изменяться, соответственно меняя и тягу. В паровозах с конденсацией пара вместо конусного устройства применялся вентилятор (так называемый «дымосос»), приводимый в действие паровой турбиной.
- Предохранительные клапаны — устройства для сброса давления в котле, если оно превышает определённый безопасный предел. Предназначены для предотвращения взрыва парового котла при возникновении аварийных режимов работы.Теплоизоляция. Для уменьшения потерь тепла снаружи котёл закрывался слоем изоляции между стенками котла и внешней стальной обшивкой.
- Механические представляют собой подпружиненный клапан, который приоткрывается при достижении определённого давления и снова закрываются после сброса давления до безопасного уровня.
- Плавкие представляют собой пробки из легкоплавкого металла, расположенные внутри топки. При превышении определённой температуры (например, при чрезмерном выкипании воды) расплавление пробки приводило к разгерметизации котла, быстрому сбросу давления и, одновременно, к заливанию огня в топке водой из котла.
Характеристики котла
Котёл характеризуется следующими параметрами:
- Общая площадь нагрева, м 2 . Эта площадь складывается из площадей нагрева топки, площади перегревателя, а также площадей дымогарных и жаровых труб;
- Объём парового пространства, м 3
- Зеркало испарения, м 2
- Рабочее давление, атм
Машина
Паровая машина паровоза состоит из цилиндров, отлитых как одно целое с золотниковыми коробками, механизма для передачи усилия на движущие колёса (кривошипно-шатунный механизм) и парораспределительного механизма. Цилиндры паровой машины (которых на паровозе бывает 2 и более) отливаются из стали и укрепляются на раме с помощью болтов и клиньев.
В паровозах применялись следующие виды паровых машин:
- Простая двухцилиндровая — проста по конструкции, но имеет малую мощность и низкую экономичность;
- Простая многоцилиндровая — обладает большей мощностью, но сложна по конструкции;
- Компаунд-машина — также обладает большой мощностью и хорошей экономичностью, но имеет помимо сложной конструкции проблемы при движении с частыми остановками.
Несмотря на недостатки, в большинстве паровозов применялись простые двухцилиндровые машины, экономичность была повышена введением пароперегревателя, а мощность -— созданием сочленённых паровозов.
Парораспределительный (обычно кулисный) механизм паровоза состоит из кулисы 1, качающейся на оси и соединённой своим нижним концом с пальцем контркривошипа 2, насаженного на ведущем колесе под некоторым углом к кривошипу. Движение от кулисы передаётся с помощью радиальной тяги 3 верхнему концу рычага (маятнику) 4; нижний конец маятника получает движение от ползуна 5. Движение золотнику 6 сообщается от промежуточной точки маятника. С помощью кулисного механизма осуществляются (золотником) все фазы парораспределения, регулирование мощности паровоза путём изменения степени наполнения (отсечки) пара в цилиндр 7 и реверсирование 8 — получение обратного хода паровоза.
В некоторых случаях для временного повышения силы тяги (при трогании с места и на подъёмах) на паровозах, кроме основной паровой машины, устанавливают вспомогательную (бустер), передающую работу на поддерживающие оси паровоза или на оси тендера.
Другие элементы машины паровоза:
- Сальники — уплотнения, предотвращающие утечки пара;
- Байпасы — специальные устройства, которые располагались на золотниковой коробке. Байпасы работали как перепускные клапаны при закрытом регуляторе (при отсутствии подачи пара) и предотвращали торможение паровоза цилиндрами при езде по инерции.
Экипаж
Экипажная, или рамно-ходовая, часть паровоза состоит из рамы, на которой устанавливаются котёл и цилиндры, колёсных пар с буксами, рессор с балансирами и тележек.
- Рама — металлическая несущая конструкция, к которой крепились остальные части паровоза;
- Передняя тележка. Во многих конструкциях паровозов передняя тележка представляла собой сложную конструкцию, помогавшую паровозу вписываться в повороты. Например, в паровозах серии С использовалась тележка Цара-Краусса, объединяющая бегунковую и переднюю движущую пары колес. При этом в момент прохождении поворота бегунковая ось поворачивалась, а движущая пара получала соответствующее боковое смещение в противоположном направлении.
- Ведущая колесная пара . Непосредственно на эту пару воздействовала машина через ведущее дышло .
- Сцепные колесные пары . Эти колёса вращались от ведущей пары через сцепные дышла .
- Бегунковые колесные пары. Бегунковых пар было 1 или 2, в некоторых паровозах могли отсутствовать (паровозы формул 0-Х-Х).
- Поддерживащие колесные пары. Располагались под будкой или топкой. В зависимости от осевой формулы могли отсутствовать. Паровозы с поддерживающими колесными парами были лучше приспособлены для движения задним ходом.
- Осевые буксы — места крепления торцов осей колёс.
- Рессоры — упругие элементы, располагающиеся между колёсами и рамой. Рессоры смягчают вибрацию.
Файл:Steam locomotive base.png
Рессорное подвешивание паровоза: 1 — рессора; 2 — опорные стойки; 3 — рессорные подвески; 4 — балансиры; 5 — поперечный балансир
На оси надеты коробки (буксы), в которых помещёны подшипники, соприкасающиеся с шейками осей. В буксы заливается смазка. На буксу опирается рессора, при колебании которой букса перемещается в раме вверх и вниз. В вырезах рамы прикрепляются буксовые направляющие: одна из этих направляющих делается наклонной, а между буксой и направляющей ставится клин (буксовый), которым можно регулировать зазор. Для лучшего распределения нагрузки на отдельные колёсные пары рессоры соединяются между собой балансирами.
Более подробно об устройстве экипажа и об осевых формулах см. статью Осевая формула паровоза.
- Сцепка — устройство для соединения вагонов и локомотива в состав.
- Буфера — элементы, располагающиеся в месте сцепки и предотвращающие резкие удары при соединеии вагонов.
Будка
В будке находились машинисты ( паровозная бригада ) и были сосредоточены все элементы управления паровозом. В будку также выходила задняя часть топки с шуровочным отверстием для загрузки топлива.
Тендер
Тендер — специальный вагон, прицепляемый сзади к паровозу, в котором располагались запасы воды и топлива для котла. Зачастую, тендеры имели стандартную конструкцию и использовались с несколькими сериями паровозов. В отдельных паровозах тендер также содержал специальное оборудование для конденсации отработанного пара ( тендер-конденсаторы ), автоматический углеподатчик .
Оборудование
- Тормоза. На паровозы устанавливались, в основном, автоматические воздушные тормоза Вестингауза. Сжатый воздух накачивался паровоздушным насосом в специальный резервуар, а из резервуара воздух подавался в тормозные цилиндры, системой рычагов связанные с тормозными колодками. При открытии расположенного в будке крана, давление в общей воздушной магистрали поезда падало, и колодки давлением воздуха из резервуара прижимались к колёсам.
- Скоростемер, проводимый в действие от одного из колёс;
- Пирометр — устройство для измерения температуры перегретого пара;
- Песочница. Обычно устанавливалась наверху котла. В песочнице находится специально просеянный речной песок, который давлением пара подается к колёсам при трогании и движении вверх по уклону для увеличения трения между колёсами и рельсами.
- Свисток. На последних сериях паровозов применялись гармонические многотональные свистки.
Литература
- Никольский А. С., Паровозы серии С, изд. «Виктория», 1997
- БСЭ, 2-е издание
Видео: Паровоз и его принцип действия
Как были устроены паровозы
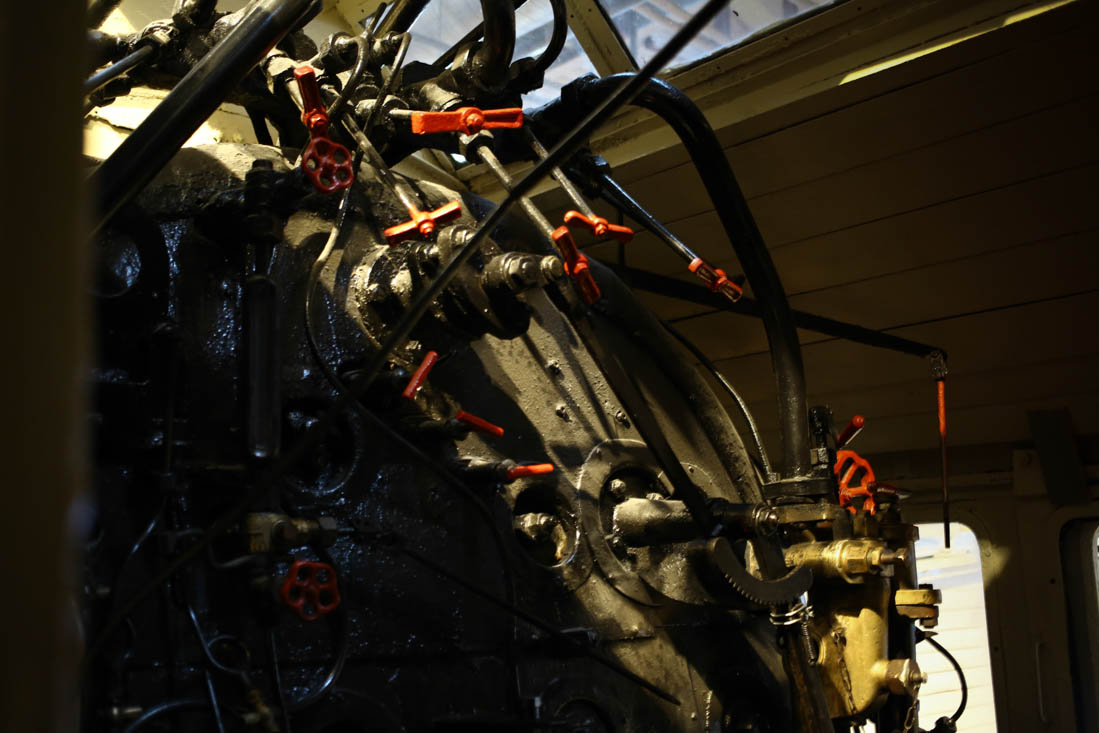
Так выглядит кабина паровоза «Серго Орджоникидзе» (это СО17-1137). Множество трубок сверху — это пароразборная колонка, к каждому потребителю отходит своя труба. А потребителей в уже достаточно зрелом технически паровозе много: две паровые машины слева и справа для движения колёс, свисток, механический углеподатчик, инжекторы для закачки воды, электрический генератор для освещения, насос для воздушной магистрали и так далее.
До электрических ламп использовали керосиновые фонари прямо впереди паровоза и ацетиленовые химические прожекторы. Потом примерно в начале двадцатого века «люксовые» вагоны обзавелись электрическим светом, а потом и паровоз стал освещаться яркими лампами, в частности, чтобы видеть, что происходит с колёсами и осями. Потому что помощнику машиниста иногда нужно было выйти на ходу и постучать кувалдой по кулисе, так как снег забился и смёрзся в лёд.
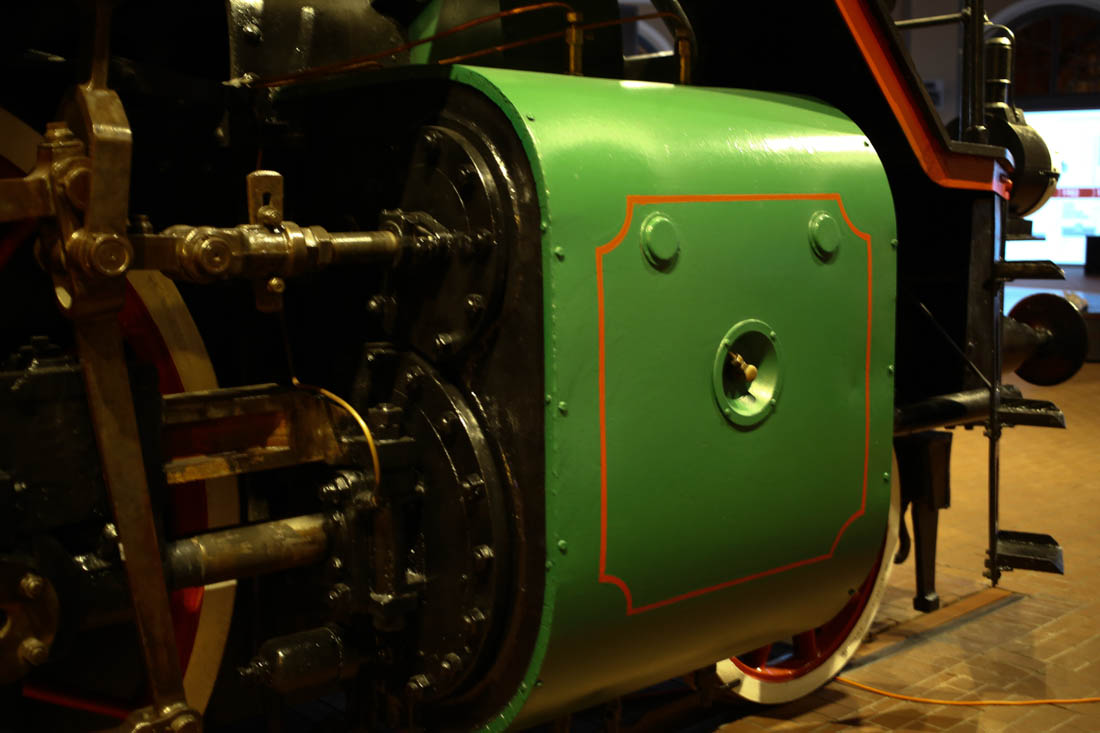
Отечественный пассажирский паровоз отличается от грузового визуально очень легко. Он выглядит нарядно, цветной (чаще всего зелёный или синий), у него большие сцепные колёса. Для пассажирского была важна скорость, для грузового — тяга, поэтому у грузового сцепные колёса меньше. И грузовые паровозы обычно чёрные.
Впереди паровоза есть маленькая бегунковая тележка, которая имеет возможность поворачиваться относительно основной рамы. Вот она сразу перед зелёной паровой машиной:

Она нужна для того, чтобы паровоз вписывался в кривые (мог поворачивать легче).
Вот паровая машина, она преобразует энергию пара в механическую энергию, движущую колёса:
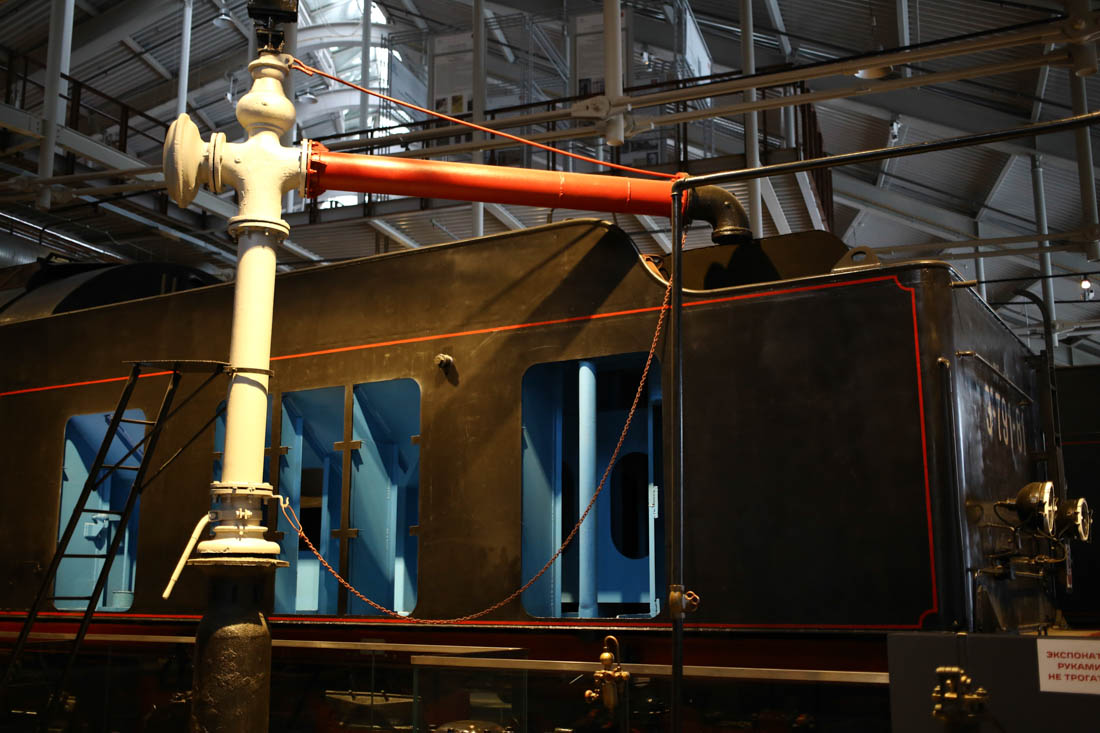
За паровозом идёт вагон-тендер, туда грузятся запасы угля и воды. Обратите внимание на характерную русскую контрбудку: она соединяется с будкой на паровозе специально для обеспечения более комфортных условий работы паровозной бригады в зимнее время.

Вот принципиальное устройство паровоза (здесь и дальше мы ходим по Музею железных дорог России в Петербурге). Они сделали замечательный стенд с анатомией паровоза:


Чтобы паровоз шёл, в него надо загрузить уголь (топливо), воду (рабочее тело) и бригаду из машиниста, помощника машиниста и кочегара. Вот так с помощью гидроколонки грузилась вода через специальный люк в тендере:
Дальше бригада топит котёл и управляет поездом. Соответственно выделяются топка, котёл, колпак сухопарника и труба. Около колёс — паровые машины, которые делают движение из энергии пара. Внутри паровоза происходит парообразование, затем пару раз пар прогоняется по контуру трубок внутри устройства.
Паровозом почти до современности управлять надо было очень нежно и аккуратно, и для этого нужен был высокий профессионализм. Дело в том, что любой участок пути имеет наклоны: спуски и подъёмы. Вагоны взаимодействуют неравномерно, и сцепки между ними рвутся. Поезд может рассыпаться, и это закончится плохо. Плюс просто надо учитывать огромную инерцию и уметь управлять всей этой махиной. Поэтому в будке были два квалифицированных человека: помощник, умеющий топить котёл, и машинист, умеющий управлять поездом и вообще всё остальное.
Вот рабочее место машиниста и его обзор:


А вот помощника с дверью наружу:


Кочегар, вопреки распространённому мнению, не топил, а просто подавал уголь в бункер в паровозе из тендера. Это обычно был здоровый мужик, который умел много работать лопатой.

На этой лопате, кстати, помощники сдавали негласный экзамен машинистам при приёме в бригаду. Надо было пожарить яичницу. Для этого надо было равномерно растопить топку, закидывая уголь по углам отсека, правильно удерживать лопату, оценивать температуру в отсеке по цвету деталей и угля и управлять температурой лопаты. Если яичница получалась сгоревшей или «с соплями», это был негодный помощник. Если отличной — можно было есть, запивая водой из баков. Вот из этого, где написано «Вода отравлена, пить нельзя»:

Воду из баков, несмотря на надпись, кипятил и пил почти каждый машинист. Но это было запрещено, потому что после загрузки воды в неё надо было кинуть несколько таблеток средства от накипи, которое не очень полезно для здоровья. Это чтобы трубочки внутри паровых и водяных систем не забивались слишком быстро. Мягкая вода так ценилась, что, если находился источник около железной дороги, там сразу ставилась станция, даже если не было населённого пункта по дороге. Среднее расстояние между английскими станциями — 20 километров, а между нашими — 80. И то потому, что это почти предел хода паровоза без дозаправки водой.
Это проблема, и требовалось хоть какое-то её решение. Первый дизельный тепловоз придумали и собрали у нас, чтобы решить часть недостатков паровозной системы. Конкретно очень хотелось уйти от зависимости по воде и упростить манёвры на станциях. Маневровый тепловоз хорош тем, что его не надо постоянно топить: есть работа — включил двигатель, нет работы — выключил. В итоге попробовали собрать прототип и сделали вот это творение сумрачного русского гения — Щ-ЭЛ-1 1924 года:


Он, увы, проработал недолго и широко не распространился. У прототипа было слишком много проблем, связанных с тем, что пар давал мгновенную обратную связь, а ДВС требовал коробку передач между двигателем и колёсами. Переключение передач создавало жёсткие толчки, и они могли послужить причиной обрыва сцепок. Понадобилась электрическая система передач, что повлекло вот такую конструкцию:

В итоге на некоторое время от тепловозов отказались и стали проводить опыты сразу с электрическими двигателями. Как вы можете догадаться, аккумуляторы тогда были не очень, и поэтому распространение они получили только там, где могли ходить трамваи. То есть на трамвайных рельсах по ночам ползали грузовые поезда для предприятий Москвы.

Но, конечно, паровозы всё больше и больше устаревали. В какой-то момент в СССР сделали невероятно красивый и эффективный паровоз. Вот он, в музее стоит последний паровоз серии П36. У него четырёхзначный номер 0251, но произвели его ровно вот столько:

Из-за этого лампаса его прозвали «Генерал».



И примерно в этот же момент Америка сняла с производства паровозы, и у нас на XX съезде партии Хрущёв решил тоже поставить на тепловозы. Так появился ТЭЗ — убийца паровозов:

А это палубные крепежи для того, чтобы поставить тепловоз в СССР морем. Везли через Владивосток и вагоны (разобранные), и тепловозы.

Потом была богатая история тепловозов СССР. Из интересного стоит отметить вот эти экспонаты:

Рейсовый дизельный автобус АВ 758 — румынский. Ходил он 110 километров в час, то есть не сильно быстрее паровозов (паровозы могли и до 120 км/ч развить), но зато не останавливался для дозаправки водой.
Вот на ТЭ-6769 (Т означает трофейный эквивалент того, что после Т, то есть максимально близкий по характеристикам к серии Э) очень хорошо видно песочницу:

Отводы от неё ведут к каждому колесу и заканчиваются примерно вот так:

Так песок подаётся под колёса для увеличения трения. Это нужно при экстренном торможении или при обледенении путей.
Под колёсами ещё хорошо видно рессоры, магистрали и тормоза:


А вот с помощью этого устройства можно было узнать скорость паровоза:

Скорость вращения снималась с передней оси, а затем преобразовывалась в линейную скорость на приборе.
Есть ещё интересный класс паровозов, это так называемые паровозы-танки. Они отличаются от обычных только тем, что уголь и вода у них — на самом паровозе, а не в тендере:

Понятно, что запасы там не очень большие, но иногда так действительно проще.

На этом танке есть отличный карбидный фонарь. Верхний с жёлто-оранжевой кромкой — это «американский фонарь», он же — ацетиленовый химический прожектор. В ёмкость с карбидом капала вода (напор воды регулировался вручную), она реагировала, выделялся горючий газ, который затем горел в горелке. Получалось яркое пламя, которое давало света куда больше, чем «фары на свечах» снизу. Кстати, свечные фонари — съёмные, чтобы можно было осмотреть паровоз. Позже стали делать освещение. Вот лампа серии СО, которая освещает колёса:

И, возвращаясь к рабочему месту помощника машиниста СО, там рядом — распредщит, пока небольшой, как раз для таких ламп:

Очень интересно устройство поворотного круга. Депо тогда были основаны на архитектуре поворотного круга:
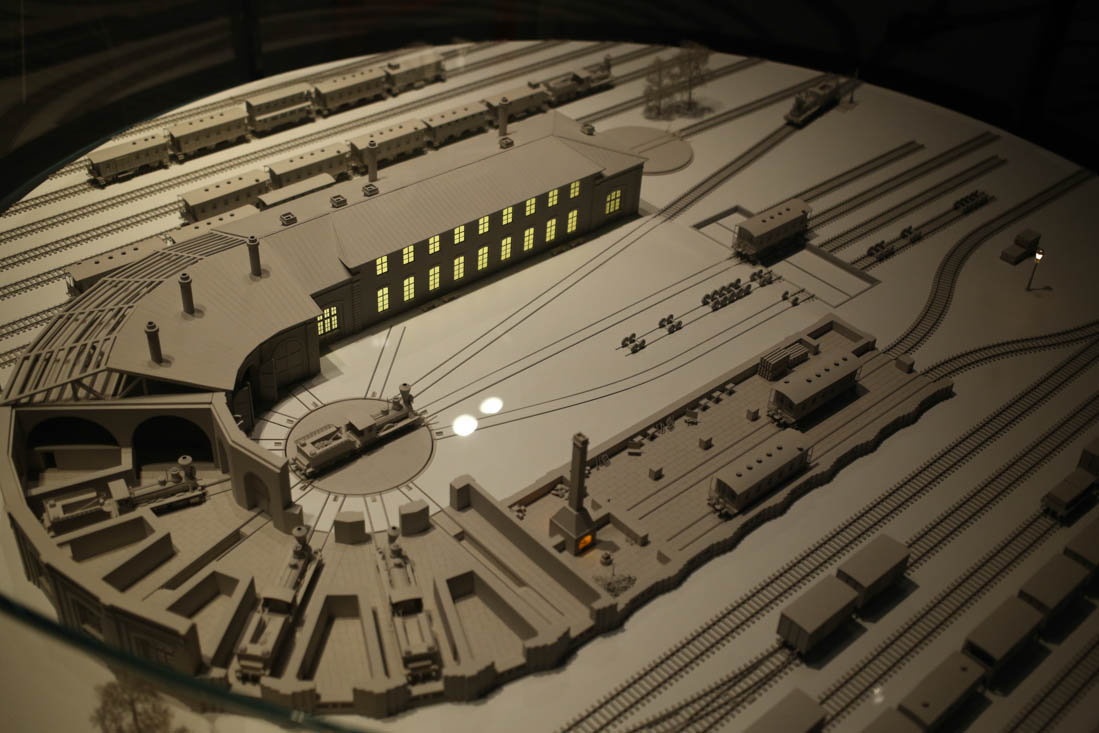
Эти паровозы в музее были расставлены именно таким кругом, который находится в центре экспозиции (это когда-то было действующее депо):

Альтернатива такому кругу — треугольники стрелок. Но круги, как видите, были куда удобнее, особенно когда от ручного поворота перешли к двигателям.
Теперь давайте посмотрим на паровозы сверху. Вот здесь хорошо видно шнек для подачи угля из тендера:

Предохранительные клапаны (позже на более мощных паровозах их стали делать по три, тут два на случай выхода одного из строя):
На тепловозах сверху и с боков — ещё характерные решётки для холодильника: поскольку двигатели ставили судовые, надо было их как-то охлаждать, чтобы не закипели. В воде это просто (водой), а на железной дороге до четверти локомотива занимает холодильная установка.
Вот это реконструкция середины рабочего дня на станции:

Сзади видно таблицу с локомотивами и начальниками бригад. Бригады могли быть закреплены за локомотивом (три бригады, один старший машинист) или меняться. Первый способ обеспечивал лучшее обслуживание «родного» локомотива, а второй — меньший пробег, поскольку бригады отдыхали в оборотном депо и иногда не могли сразу выйти назад.
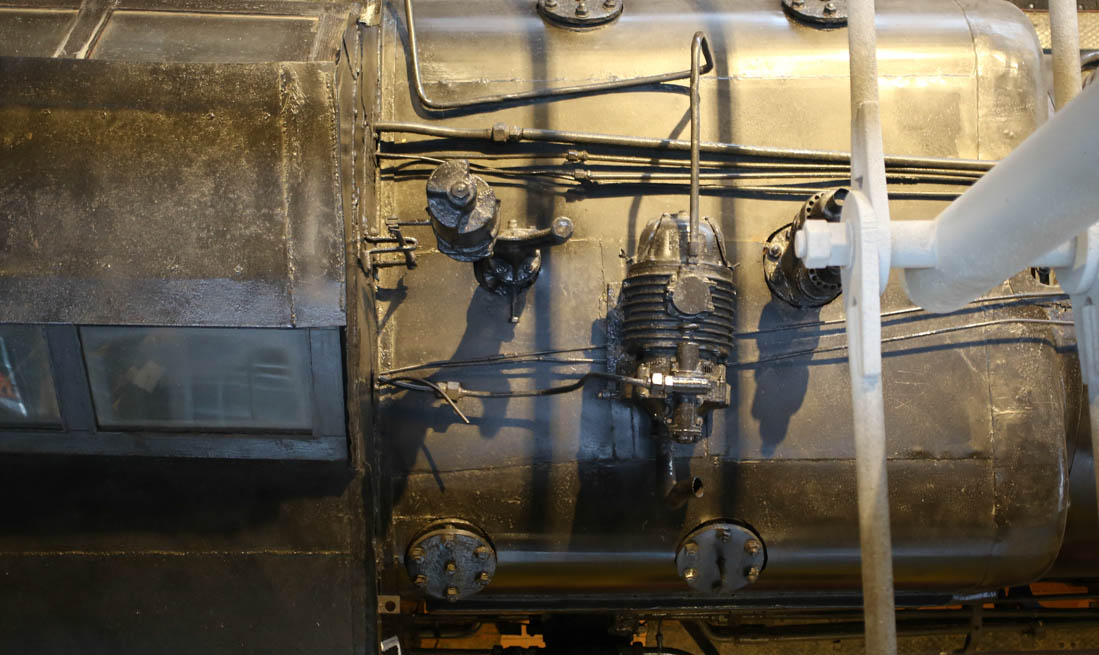
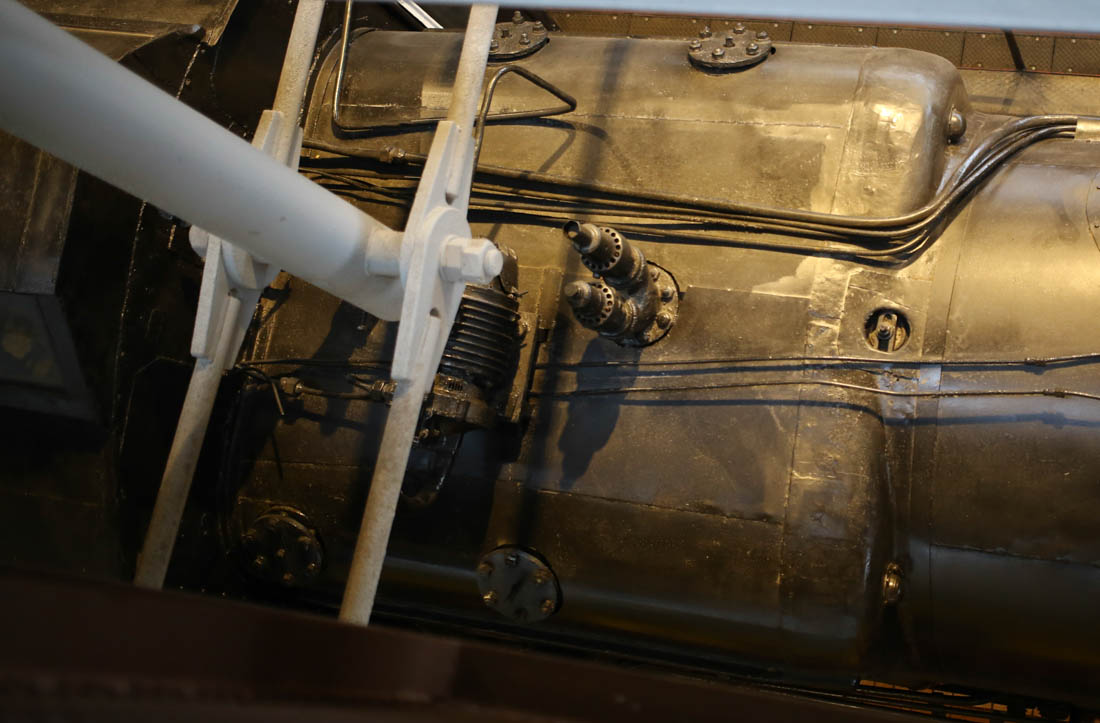
И последнее. Паровоз с большим аккумулятором для пара, бестопочный. Он использовался на химических заводах, где огонь был запрещён:

Передняя часть — это большой бак для пара, по сути. Паровоз приходил к котлу, заправлялся вот так:

И шёл в опасную зону работать. Пара хватало примерно на два часа.
Первые регуляторы паровых машин

Данная работа продолжает цикл статей, посвященных истории автоматического управления техническими системами. В ней рассмотрены первые регуляторы скорости паровых (и других) машин, широкое внедрение которых сопровождало начало промышленной революции XVIII в. Представлены регуляторы Уатта, Эри, Дженкина, Фарко (с сервомотором), электромеханический регулятор Чикалева, а также обсуждаются особенности их законов регулирования.
Александр Микеров,
д. т. н., проф. каф.
систем автоматического управления
СПбГЭТУ «ЛЭТИ»В предыдущей статье [1] рассматривались редкие примеры известных регуляторов с обратной связью от древних веков до XVIII в.: водяные часы, регуляторы температуры и давления, механизм разворота ветряного колеса мельниц. Однако широкого применения подобные регуляторы не нашли из-за своей сложности и дешевизны ручного труда человека, который легко справлялся с такими задачами управления. И только с началом промышленной революции потребовались регуляторы совсем другого рода — регуляторы скорости машин.

Рис. 1. Джеймс Уатт (1736–1819)
Промышленная революция в европейских странах началась в XVIII веке с широкого применения паровых машин для откачки воды из шахт, плавки металлов, приведения в движение станков и механизмов на заводах. Особенно много машин потребовалось в XIX в. на транспорте после изобретения Робертом Фултоном (Robert Fulton) парохода в 1808 г. и Джорджем Стефенсоном (George Stephenson) паровоза в 1825 г. Французский изобретатель Клемент Адер (Clément Ader) построил в 1890 г. даже самолет с паровым двигателем.
Первым попытался использовать энергию пара для механического движения еще французский физик и изобретатель Дени Папен (Denis Papin), построивший в 1690 г. паровой цилиндр с поршнем, который был усовершенствован в 1705 г. кузнецом Томасом Ньюкаменом (Thomas Newcomen). Однако обе машины управлялись вручную, были крайне неэффективны и широкого распространения не получили. Паровую машину с автоматическим впуском и выпуском пара с помощью золотника построил английский механик, изобретатель и предприниматель Джеймс Уатт (James Watt) (рис. 1), получивший на нее первый патент в 1769 г. [ 2 , 3 ].
Кроме того, паровые машины оснащались другими автоматическими устройствами: клапаном Папена, рассмотренным в предыдущей статье [1] , и регулятором уровня воды в паровом котле. На рис. 2 показан поплавковый регулятор первой в России паровой машины, построенной изобретателем Иваном Ползуновым на Урале в 1765 г. [5]. Паровой котел 1, вмурованный в кладку 2 с топкой 3, имел водяную трубу 4 и патрубок 5, отводящий пар. Уровень воды регулировался поплавком 6.

Рис. 2. Паровой котел Ползунова (1 — паровой котел; 2 — кладка; 3 — топка; 4 — водяная труба; 5 — патрубок, отводящий пар; 6 — поплавок)
Однако паровая машина стала вполне работоспособной и популярной только после того, как Уатт ввел в нее в 1788 г. центробежный регулятор скорости, устранивший нестабильную работу машины [4] . Уже к 1800 г. в Англии работали сотни машин Уатта (рис. 3). Центробежный регулятор паровой машины был настолько важной ее составной частью, что Уатт хранил его устройство в глубоком секрете и не патентовал.

Рис. 3. Паровая машина с регулятором Уатта (1 — паровой цилиндр; 2 — золотниковый распределитель; 3 — заслонка подачи пара; 4 — центробежный чувствительный элемент)
Центробежный чувствительный элемент, являющийся измерителем скорости машины, был заимствован Уаттом из водяных и ветряных мельниц, где он использовался для изменения усилия прижима жерновов при изменении скорости ветра. Его устройство было запатентовано механиком Томасом Мидом (Thomas Mead) в 1787 г. [ 5 , 6].

Рис. 4. Центробежный чувствительный элемент Уатта (1 — шкив; 2 — шары; 3 — ползун; 4 — рычаг)
Центробежный чувствительный элемент Уатта (рис. 4), приводимый во вращение от вала машины через шкив 1, содержит два массивных шара 2, соединенных с ползуном 3, связанным рычагом 4 с заслонкой паровой машины [7]. Центробежная сила, возникающая при вращении шаров, уравновешивается их весом таким образом, что каждому значению скорости соответствует определенное положение ползуна, а следовательно, и расхода или давления пара в цилиндре. В дальнейшем для улучшения регулировки такой элемент оснащался пружиной, компенсирующей вес шаров.
При увеличении момента нагрузки скорость машины слегка падает, поскольку для увеличения давления пара заслонка должна быть приоткрыта, что достигается движением ползуна вниз, т. е. опусканием грузов. Возникающая при этом ошибка регулирования скорости была названа неравномерностью регулятора, а все регуляторы такого типа назывались модераторами, т. е. устройствами, которые не устраняют ошибку регулирования, а только ее снижают. Современное название ошибки — статическая ошибка, а регулятора — статический регулятор.
Второй особенностью регулятора Уатта является прямое механическое действие чувствительного элемента на заслонку. Аналогично работал и рассмотренный в предыдущей статье [1] регулятор температуры Дреббеля, в котором энергия открывания вентиляции вырабатывалась спиртовым чувствительным элементом. Поэтому все регуляторы такого рода назывались регуляторами прямого действия.
Помимо коммерческого успеха, регулятор принес его автору и заслуженное признание. В его честь единица мощности в системе SI названа 1 Вт. Уатт был приглашен в Российскую академию наук, правда, от этой чести отказался. Центробежный регулятор скорости позднее нашел широкое применение также в телеграфных аппаратах, телескопах, граммофонах и т. д. [6].
В XIX в. изобретатели предложили ряд усовершенствованных центробежных регуляторов скорости. Так, английский математик и астроном Джордж Эри (Georg B. Airy) построил в 1840 г. телескоп с автоматическим приводом по азимуту и углу места с центробежным фрикционным регулятором, обеспечивающим равномерный поворот со скоростью вращения Земли [7].
На рис. 5а показан общий вид этого телескопа, а на рис. 5б — в упрощенном виде принцип действия регулятора привода без редукторов. Труба телескопа 1 поворачивается через блок механических редукторов 2 двигателем в виде барабана с грузом 3, снабженным фрикционным регулятором с расходящимися шарами 4, трущимися о поверхность неподвижной муфты 5 в случае, когда скорость вращения телескопа превышает заданную.

Рис. 5.
а) Телескоп Эри;
б) Фрикционный регулятор Эри. 1 — труба телескопа; 2— блок механических редукторов; 3 — двигатель; в виде барабана с грузом; 4 — фрикционный регулятор с расходящимися шарами; 5 — муфтаВ данном регуляторе увеличение момента трения в опорах телескопа компенсируется уменьшением трения в регуляторе, однако это возможно лишь при некотором снижении скорости вращения, т. е. появлении статической ошибки регулирования.
Более совершенным является регулятор паровой машины английского инженера Флиминга Дженкина (Fleeming Jenkin), построенный в середине XIX в. (рис. 6) [7].

Рис. 6. Регулятор Дженкина (1 — заслонка; 2 — груз; 3 — муфта; 4 — подпружиненные шары; 5 — вал; 6 — катаракт)
В этом случае заслонка 1, регулирующая подачу пара в машину, поворачивается двумя устройствами: грузом 2, аналогичным двигателю Эри, и муфтой 3 фрикционного регулятора с подпружиненными шарами 4, приводимого во вращение от вала машины 5. В отличие от регулятора Эри, муфта 3 подвижная. Она прикрывает заслонку 1 тогда, когда шары вовлекают муфту во вращение.
Таким образом, когда скорость машины больше заданной, шары закрывают заслонку, а когда меньше, заслонка открывается грузом. При этом регулятор не имеет статической ошибки, поскольку, например, при увеличении нагрузки на машину и падении ее скорости груз приоткрывает заслонку до тех пор, пока скорость машины не вернется к заданному значению.

Рис. 7. Регулятор непрямого действия (1 — заслонка; 2 — серводвигатель; 3 — золотниковый распределитель; 4 — центробежный регулятор с пружиной)
Регулятор Дженкина снабжен, как это видно на рис. 6, еще одним весьма важным регулирующим элементом 6, называемым катарактом, в виде цилиндра с маслом, в котором движется груз. Катаракт был применен впервые в регуляторе Эри [7]. Было обнаружено, что введение такого элемента, который со временем стал весьма популярным, существенно улучшает плавность и точность регулирования скорости. По современной терминологии катаракт — это устройство, формирующее отрицательную обратную связь по скорости, называемую тахометрической обратной связью, являющуюся мощным средством динамической коррекции систем автоматического управления.
Другие примеры успешных регуляторов, изобретенных в XIX в., приведены в обзоре [4].
Все рассмотренные выше регуляторы являются регуляторами прямого действия, поскольку чувствительный элемент оказывает прямое силовое воздействие на заслонку или объект управления. Однако это возможно лишь в регулировании объектов малой мощности. Действительно, повернуть, например, затворы большой гидротурбины с помощью центробежного регулятора вряд ли удастся.
Французский инженер Джозеф Фарко (Joseph Farcot) предложил в 1873 г. ввести в регулятор дополнительный исполнительный элемент, названный им серводвигателем или сервомотором, усиливающим мощность чувствительного элемента [7, 8]. Такие регуляторы стали называть регуляторами непрямого действия. Пример такого регулятора приведен на рис. 7. В данном случае заслонка 1 двигается дополнительным паровым цилиндром – серводвигателем 2, золотниковый распределитель 3 которого управляется центробежным регулятором 4 с пружиной.
Нетрудно убедиться в том, что введение серводвигателя не только увеличивает выходную мощность чувствительного элемента, но и обеспечивает, в принципе, нулевую ошибку регулирования скорости, на которую настроен чувствительный элемент. Действительно, заслонка не движется только тогда, когда золотник перекрывает впускные каналы цилиндра. Регулятор настраивается таким образом, чтобы этому положению золотника соответствовала заданная скорость вращения шаров.

Рис. 8. Регулятор Чиколева (1 — электроды; 2 — обмотка якоря; 3 и 4 — обмотки возбуждения)
При увеличении момента нагрузки скорость машины падает, золотник смещается вверх и сервомотор поднимает заслонку до нового положения, при котором скорость машины будет в точности равна заданной. По современной терминологии применение серводвигателя в регуляторе непрямого действия означает введение интегратора, превращающего статическую систему в астатическую.
Все рассмотренные регуляторы с обратной связью используют принцип регулирования по отклонению или по ошибке. Современная терминология относит их к П- или ПИ-регуляторам. Однако в XIX в. появились и другие устройства: с регулированием по возмущению и с регулированием по производной от ошибки. Регулирование по возмущению или по нагрузке (принцип инвариантности Понселе) было предложено в 1830 г. французским математиком и инженером Жаном-Виктором Понселе (Jean-Victor Poncelet), а регулирование по производной выполнял так называемый инерционный регулятор, изобретенный в 1845 г. братьями Вернером и Вильгельмом Сименсами (Verner, Wilhelm Siemens) в Германии [4, 7].
Принципы построения и конструкции различных регуляторов детально анализировались в лекциях 1846 г. знаменитого профессора Петербургских железнодорожного и технологического институтов Николая Федоровича Ястржембского [8].
К концу XIX в. стали появляться и первые электромеханические регуляторы. Примером может служить дифференциальный регулятор дуговых ламп для освещения московских площадей, построенный известным российским электротехником Владимиром Николаевичем Чиколевым в 1874 г. Схема регулятора, заимствованная из [9], показана на рис. 8, где штриховыми линиями обозначены соединительные провода.
Электроды 1 дуговой лампы сближаются через винтовую передачу электродвигателем постоянного тока с обмоткой якоря 2 и двумя обмотками возбуждения 3 и 4, причем обмотка 3 подключается прямо к источнику питания, а обмотки 2 и 4 соединяются с нижним электродом. Обмотки 3 и 4 создают потоки возбуждения двигателя противоположных знаков, причем их действие уравновешивается при нормальном зазоре между электродами. При увеличении зазора его сопротивление растет, а ток падает, что приводит к преобладающему действию обмотки 4 и вращению двигателя в сторону сближения электродов. При чрезмерном сближении электродов будет преобладать действие обмотки 3, обеспечивающей вращение двигателя в противоположную сторону и увеличение зазора.
Таким образом, новый этап развития систем автоматики, начавшийся с изобретения и внедрения паровой машины, отличался следующими основными особенностями:
- Паровая машина потребовала ряда автоматических устройств, таких как клапан давления, регулятор уровня, золотниковый парораспределитель и регулятор скорости вращения, что поставило перед изобретателями первые серьезные задачи автоматического управления.
- Наибольшее распространение получили центробежные регуляторы скорости прямого действия, в которых чувствительный элемент обладал непосредственным воздействием на заслонку (регулятор Уатта) либо создавал переменный нагрузочный момент трения (регулятор Эри).
- Эти регуляторы имели пропорциональный (П) закон регулирования, вызывающий статическую ошибку, устраняемую в регуляторе Дженкина механическим интегратором, обеспечивающим пропорционально-интегральный (ПИ) закон регулирования.
- До середины XIX в. были предложены и другие законы регулирования: по возмущению (принцип Понселе) и по производной от ошибки (регулятор Сименсов).
- В регуляторах непрямого действия, первый из которых был создан Фарко, чувствительный элемент управлял дополнительным сервомотором заслонки, что не только повышало мощность регулятора, но и обеспечивало астатизм регулирования скорости.
- Появились регуляторы и других машин, например фрикционный регулятор вращения телескопа Эри, электромеханический регулятор дуговой лампы Чиколева и др.
Ко второй половине XIX в. было известно уже большое число различных достаточно сложных конструкций регуляторов, заложивших основы создания замкнутых систем автоматического управления в современном понимании этого термина. Однако отсутствовали не только методики расчета, выбора параметров и настройки, но и теоретическое понимание происходящих в них процессов регулирования.
Как будет показано в следующей статье, широкое внедрение паровых и других машин, а также повышение точности и быстродействия их регулирования выявило проблему устойчивости регулятора, вызванную противоречием между требованиями точности и устойчивости работы машины, а также наличием в ней нелинейных элементов.
Тема: Способы регулирования мощности локомотива и скорости движения поезда. Автоматизация процессов управления
Условия ведения поезда. Перед локомотивной бригадой каждую поездку стоит задача провести поезд по участку, обеспечив соблюдение нормативов, установленных графиком движения поездов, и безопасность движения. Решить эту задачу было бы относительно просто при одинаковых массе и длине поездов, движущихся по прямой железнодорожной линии, которая расположена на площадке, т. е. в условиях, когда движение не осложняется наличием кривых, подъемов и спусков. Можно было бы выработать единый и достаточно простой режим ведения поезда, состоящий из трогания поезда с места, разгона с выходом на автоматическую характеристику, отключения тяговых двигателей перед остановкой и торможения. В этом случае соответственно упростилось бы и регулирование мощности локомотива.
Фактически же регулирование сил, действующих на поезд, представляет собой весьма сложную задачу. Во-первых, с учетом разнообразных сочетаний элементов профиля и плана пути при движении поезда приходится иметь дело с непрерывно изменяющимися силами сопротивления движению; во-вторых, значительно разнятся допускаемые скорости на перегонах и станциях, главных и боковых путях, отдельных искусственных сооружениях, кривых различного радиуса; в-третьих, различна длина и масса поездов, их обеспеченность тормозами.
К этому надо добавить ограничения скорости, вносимые постоянными и временными предупреждениями, а также особенностями конструкции подвижного состава.
Кроме того, сезонные метеорологические условия сказываются на силе сопротивления движению, реализуемой локомотивом мощности, силе сцепления, и следовательно, влияют на силы тяги и торможения.
В отличие от того, как это принято в тяговых расчетах, при ведении реального поезда масса его не сосредоточена в одной точке и, следовательно, поезд, имеющий определенную длину, может располагаться на различных элементах профиля. Скорость движения поезда не меняется мгновенно при переходе с одного элемента профиля на другой.
Технические характеристики подвижного состава также могут существенно отличаться от принятых в тяговых расчетах, а это сказывается на силах, действующих на поезд в тяговом и тормозном режимах.
Параметры, определяющие условия движения поезда, изменяются в результате действия многих факторов. Некоторые из них взаимосвязаны, отдельные являются независимыми, но их влияние может вызвать изменение в широких пределах параметров, определяющих характер движения поезда.
Все это значительно усложняет регулирование мощности локомотива и выбор рационального режима ведения поезда, требует от машинистов специфических профессиональных навыков, определяемых теоретической подготовкой и определенным практическим опытом.
Автоматизация процесса ведения поезда, особенно грузового, -дело может быть и недалекого, но будущего, несмотря на успехи в развитии микропроцессорной техники и программно-математического обеспечения.
Разнообразие эксплуатационных условий, под которыми обычно понимают вес и длину поезда, его сопротивление движению, порядок пропуска поезда по перегонам, погодные условия, установленные предупреждениями ограничения скорости движения и др., ставит перед машинистом в каждой поездке задачу выбора и реализации рационального режима ведения поезда, соответствующего именно данным условиям. Разрабатываемые в локомотивных депо карты режимов ведения поездов технически обоснованы для некоторых усредненных эксплуатационных условий и поэтому рассматриваются локомотивными бригадами лишь как ориентир. Хорошо подготовленные локомотивные бригады, понимающие механику и энергетику тяги поездов, творчески корректируют рекомендации, приведенные в режимных картах, и реализуют в зависимости от конкретных условий движения рациональные режимы ведения поезда и управления локомотивом.
При ведении поезда по перегону машинисту приходится непрерывно регулировать мощность локомотива, изменять силу тяги й скорость движения в соответствии с фактическим сопротивлением движению и эффективностью тормозов, обеспечивая необходимое ускорение и замедление поездов различной массы. В зависимости от конкретных условий машинист меняет положение рукоятки контроллера до 60 раз в 1 ч при том, что некоторые процессы регулирования осуществляются автоматически. Например, регулятор частоты вращения вала дизеля тепловоза автоматически увеличивает подачу топлива и мощность, если возрастает нагрузка, хотя рукоятка контроллера остается в прежнем положении.
Регулирование скорости не исчерпывается тяговым режимом; не менее сложным является правильное регулирование тормозной силы при остановочных и регулировочных торможениях. Для того чтобы это осуществить, используют как пневматические, так и электрические тормоза.
Регулирование скорости в режиме тяги зависит от того, какими возможностями для этого обладает современный тяговый подвижной состав, оснащенный, главным образом, тяговыми двигателями последовательного возбуждения. Как известно, частота вращения якоря двигателя, а следовательно, скорость движения тягового подвижного состава зависят от приложенного напряжения, падения напряжения в цепи тягового двигателя, магнитного потока и конструктивных особенностей двигателя.
Для тягового двигателя локомотива увеличить частоту вращения можно, повысив приложенное к нему напряжение или уменьшив магнитный поток (ослабление возбуждения). Последнее (от двух до шести ступеней ослабления) применяется на тяговом подвижном составе всех серий.
Кроме того, скорость движения подвижного состава регулируют, изменяя приложенное напряжение путем перегруппировки тяговых двигателей, а также менее экономичным методом — введением в цепь тяговых двигателей резисторов, обеспечивающих падение приложенного напряжения. Но, поскольку использование последнего способа связано с потерями электроэнергии, нагревом резисторов и снижением КПД тягового подвижного состава, резисторы используют в период пуска двигателя.
Более целесообразно осуществлять импульсное регулирование напряжения с помощью тиристоров, преобразуя постоянное напряжение в прерывистое.
Изменяя соотношение, между продолжительностью подачи напряжения и его отсутствия, регулируют среднее значение напряжения, приложенного к двигателю, и тем самым изменяют скорость движения поезда.
Регулировать приложенное напряжение можно также, изменяя коэффициент трансформации путем переключения обмоток тягового трансформатора.
Рассмотрим, как изменяется скорость движения при наборе позиций рукояткой контроллера машиниста или при постановке ее в положение ’’Автоматический пуск” на тяговом подвижном составе различных типов.
Электроподвижной состав постоянного тока. Мощность такого ЭПС по сути ограничена мощностью тяговых двигателей и сцепным весом электровоза, а мощность тягового двигателя — током коммутации, механической прочностью и температурой нагрева его обмоток.
Частота вращения якоря двигателя постоянного тока, как известно, пропорциональна приложенному напряжению и обратно пропорциональна магнитному потоку, создаваемому полюсами; следовательно, регулирование скорости движения локомотива сводится к изменению приложенного к тяговым двигателям напряжения и создаваемого магнитного потока.
Рассмотрим, как осуществляется регулирование скорости этими способами.
Переключение (перегруппировка) тяговых двигателей с последовательного на последовательно-параллельное и параллельное соединения позволяет ступенями менять приложенное к ним напряжение. Благодаря этому при напряжении на токоприемнике 3000 В у шестиосных электровозов BJ122M, BЛ23, ЧС2 и др. тяговые двигатели при последовательном их соединении находятся под напряжением 500 В, последовательно-параллельном — 750 В и параллельном — 1500 В. У восьмиосных электровозов ВЛ8, BJI10, BJI11 тяговые двигатели при последовательном соединении находятся под напряжением 375 В, при последовательно-параллельном — 750 В и параллельном -1500 В. Четырехосные электровозы ЧСЗ и моторные вагоны электропоездов имеют только два соединения тяговых двигателей: при последовательном соединении тяговых двигателей они находятся под напряжением 750 В, при параллельном — 1500 В. Таким образом, переключая тяговые двигатели с одного соединения на другое, можно ступенями изменять приложенное к ним напряжение и регулировать скорость.
Этот способ регулирования напряжения на тяговых двигателях применялся ранее на тепловозах некоторых серий.
Включение резисторов в цепь тяговых двигателей позволяет осуществить более плавное регулирование напряжения, чем перегруппировка тяговых двигателей. Однако недостатки, связанные с потерями электрической энергии, нагревом резисторов и снижением КПД, приводят к тому, что резисторы используют лишь для пуска двигателей и разгона поезда. Кроме того, локомотивная бригада должна следить за тем, чтобы не произошло недопустимого нагрева пусковых резисторов.
Изменение магнитного потока, создаваемого главными полюсами тягового двигателя, также используют для регулирования частоты вращения якоря, а следовательно, и скорости движения. Этот способ регулирования не связан со значительными потерями энергии и поэтому широко применяется на ЭПС не только постоянного, но и переменного тока, а также на тепловозах. Магнитный поток можно регулировать, изменяя ток в обмотке возбуждения;либо число витков обмотки, участвующих в создании магнитного потока. Последнее приводит к усложнению конструкции тягового двигателя, так как необходимо иметь дополнительные отводы обмотки возбуждения, особенно при использовании нескольких ступеней ослабления возбуждения.
Поэтому большее распространение получил способ регулирования магнитного потока путем подключения параллельно обмотке возбуждения тягового двигателя резистора, т.е. путем шунтирования обмотки возбуждения.
Импульсное регулирование напряжения, подводимого к тяговым двигателям, является одним из способов регулирования скорости. Для этой цели используют тиристорные установки, преобразующие постоянное напряжение в импульсное прерывистое. Изменяя соотношение между временем подачи и снятия напряжения, регулируют среднее значение приложенного к тяговым двигателям напряжения, а следовательно, скорость движения электроподвижного состава.
Электроподвижной состав переменного тока. На этом ЭПС регулирование скорости осуществляют изменением приложенного к тяговым двигателям напряжения, а также возбуждения двигателей. Напряжение на вторичной стороне трансформатора регулируют ступенями, изменяя коэффициент трансформации путем переключения секций обмоток.
Возможно плавное регулирование напряжения, приложенного к тяговым двигателям. Для этого в выпрямительной установке вместо диодов используют тиристоры. Однако при плавном регулировании уменьшается коэффициент мощности выпрямительной установки, повышается пульсация выпрямленного тока и усиливается влияние контактной сети на линии связи. Поэтому плавное регулирование-применяется не во всем диапазоне изменения напряжения, а лишь в пределах ступеней напряжения которые соответствуют значениям коэффициента трансформации.
Возможно также регулировать напряжение на первичной стороне трансформатора.
Тепловозы. Кроме применяемых на ЭПС и используемых на тепловозах способов регулирования скорости путем изменения напряжения, приложенного к тяговым двигателям, и их возбуждения, используется также дополнительно возможность плавного изменения напряжения путем регулирования работы дизель-генераторной установки. Мощность дизеля можно менять с помощью рукоятки контроллера машиниста, каждому положению которой соответствует определенная частота вращения коленчатого вала дизеля. Переводя рукоятку контроллера с одной позиции на другую, машинист изменяет степень затяжки пружины центробежного регулятора, вследствие чего изменяется подача топлива в цилиндры дизеля. Это приводит к изменению частоты вращения коленчатого вала дизеля, а значит, и якоря главного генератора. В результате изменяется напряжение главного генератора и напряжение, приложенное к тяговым двигателям, а следовательно, и скорость движения тепловоза.
Меняя подачу топлива, машинист непосредственно воздействует только на частоту вращения коленчатого вала дизеля; регулирование же электрической передачи, включая главный генератор, возбудитель и тяговые двигатели, осуществляется автоматически. При больших скоростях и соответственно малых токах наступает ограничение по возбуждению главного генератора и его мощности. Сохранение постоянства используемой мощности дизеля и увеличение тока главного генератора достигаются перегруппировкой тяговых двигателей тепловоза либо ослаблением их возбуждения. Указанные операции осу ществляются автоматически под контролем реле переходов при достижении определенных скоростей, так же как обратный переход при увеличении силы тяги и падении скорости.
Назначение рукояток контроллера. Рассмотрим основные операции по управлению локомотивом в тяговом и тормозном режимах применительно к электровозу ВЛ801, которые производят рукоятками контроллера машиниста. Так, с помощью контроллера машиниста в тяговом режиме осуществляется изменение направления движения электровоза, ручной и автоматический набор, а также сброс позиций, ослабление возбуждения тяговых двигателей. Производят также переключения силовой цепи и цепей управления в режим торможения или,наоборот, в режим тяги; собирают цепи, соответствующие режиму подтормаживания и режиму торможения; регулируют силу торможения. Для выполнения этих операций у контроллера машиниста предусмотрено несколько рукояток.
Реверсивной рукояткой, как следует из ее названия, осуществляется изменение (реверсирование) направления движения электровоза и включение позиций ослабления возбуждения тяговых двигателей.
Главная рукоятка имеет восемь положений: БВ — быстрое выключение; 0 — нулевое положение; АВ — автоматическое выключение; РВ — ручное выключение; ФВ — фиксация выключения; ФП — фиксация пуска; РП — ручной пуск; АП — автоматический пуск.
Для управления электровозом в тормозном режиме на контроллере используют 12-позиционный переключатель и тормозную рукоятку. С помощью переключателя задают тормозную силу в пределах от 20 до 50 тс.
Тормозная рукоятка имеет следующие положения: 0 — нулевое; П — подготовительная позиция; ПТ — предварительного торможения до 10 тс; Т — тормозное положение, в котором в зависимости от угла поворота рукоятки в секторе задается скорость торможения.
Автоматизация процесса управления. При ведении поезда непрерывно изменяется нагрузка, причем не только из-за колебания внешних воздействий, вызванных изменением сил сопротивления движению, но и вследствие особенностей организации движения поездов, числа и мест остановок поездов; срабатывания устройств, регулирующих нагрузку силовых и управляющих агрегатов локомотива, особенно на тепловозах. Все эти изменения требуют реакции со стороны локомотивной бригады, т.е. определенных действий по управлению поездом. Особенно сложной становится работа машиниста при возникновении боксования колесных пар: он должен принять меры для прекращения боксования и в то же время не допустить значительного уменьшения силы тяги и остановки поезда. В пассажирском движении возникает немало проблем в связи с необходимостью обеспечить определенный комфорт (плавность движения) для пассажиров как в тяговом, так и в тормозном режиме. Зачастую решить эти задачи крайне трудно для малоопытных машинистов; требуется высокая квалификация локомотивных бригад. Для улучшения использования мощности и силы тяги локомотива в сложных условиях поездной работы при высоком уровне эксплуатационной надежности и экономичности стремятся автоматизировать процессы ведения поезда и управления работой различных систем локомотива. Средства автоматизации необходимы и должны действовать как в тяговом, так и в тормозном режиме.
Системы автоматического управления движением поездов, называемые также системами автоведения, или автомашинистами, должны обеспечивать выполнение с заданной точностью графика движения поездов при соблюдении имеющихся на участке ограничений скорости. Приоритет в разработке таких систем принадлежит нашей стране. Первый опытный образец автомашиниста появился в 1957 г.; он был создан для управления движением одного электропоезда по заданной программе. При ручном (неавтоматическом) управлении машинист руководствуется лишь временем проследования станций и остановочных пунктов в соответствии с расписанием, которое не определяет время проследования блок-участков. При недостаточной квалификации локомотивной бригады могут возникать и накапливаться нарушения заданных интервалов движения по блок-участкам, в результате чего возможен сбой графика. Автоматические системы управления исключают такую ситуацию. Внедрение систем автоведения позволяет повысить точность выполнения графика движения поездов, улучшить использование пропускной способности участков, снизить расход топливно-энергетических ресурсов на тягу поездов, облегчить труд локомотивных бригад и повысить его производительность, обеспечить безопасность движения поездов.
В технической литературе имеются многочисленные сообщения об эксплуатации систем автоведения поездов на железных дорогах Японии, США, Канады, Франции и др., но все они касаются, главным образом, пассажирских перевозок на специальных, так называемых изолированных линиях. Однако применять систему автоведения только для одного поезда нецелесообразно, поскольку на участке может быть множество поездов и каждый из них оказывает влияние на движение вслед идущих, а на однопутных участках — и встречных поездов. Автоблокировка и автоматическая локомотивная сигнализация действуют односторонне, предотвращая сближение поезда с впереди идущим. Сигналы автоблокировки расставляют таким образом, чтобы интервал между поездами при движении их с расчетной скоростью соответствовал расчетному. Поезд должен двигаться по перегону так, чтобы к моменту его вступления на блок-участок на светофоре горел зеленый огонь; при любом другом огне возникает необходимость снижения скорости. Если режим ведения поезда отклонился от расчетного, положенного в основу расстановки сигналов автоблокировки, это повлияет соответствующим образом на режим вслед идущего поезда. Еще сложнее взаимодействие между поездами различных категорий, например пассажирских и грузовых: необходимо учитывать разницу в их массе, скорости движения, сериях локомотивов.
В связи с этим наиболее эффективным становится применение централизованных систем автоматического управления движением поездов. Эти системы получают и перерабатывают информацию о параметрах движения всех поездов на линии и управляют каждым поездом в соответствии с полученной информацией и требуемой программой движения. По сравнению с автономной системой автоматического управления централизованные системы обладают большими возможностями, так как, имея информацию о положении всех поездов на линии, можно более гибко компенсировать возникающие отклонения от принятой программы. Однако техническая реализация централизованных систем значительно сложнее; кроме того, требуются каналы связи между всеми поездами на линии и центральным постом управления.
Внедрение централизованных систем автоматического управления движением поездов начиналось на Московском, Ленинградском, Харьковском и Ташкентском метрополитенах. Это объясняется небольшой протяженностью линий и соответственно каналов связи, однотипностью подвижного состава, относительной простотой управления поездом, изолированностью от внешних воздействий. На магистральных железнодорожных линиях обращаются разнотипные грузовые, пригородные и пассажирские поезда с различными временами хода, допускаемыми скоростями движения, режимами ведения. Выполнить централизованные системы в этих условиях значительно сложнее. Вследствие большой протяженности линий увеличивается объем и стоимость аппаратуры передачи данных, необходимость управлять движением разнотипных поездов вызывает резкое увеличение объема информации, а это повышает требования к быстродействию управляющих ЭВМ, ведет к увеличению их числа. Выбор режима ведения пассажирского или пригородного и в особенности грузового поезда -сложная многовариантная задача. Совершенствование систем автоведения и расширение их возможностей вплоть до учета меняющихся условий на участке возможны на базе применения микропроцессоров, с помощью которых можно самостоятельно решать задачу ведения поезда, повысить надежность работы всей системы.
Используя современные технические средства микроэлектроники и вычислительной техники, накопленный опыт создания систем автоведения, ученые ВНИИЖТа и других институтов создали централизованную комплексную систему управления движением поездов на участке (КСАУДП), которая проходит испытания на Московской дороге. Составной частью КСАУДП является система автоматического управления поездами, предназначенная для автоматизации процесса управления ведением поезда, включая пуск и разгон, выбор режима ведения поезда по перегонам, торможения у платформ для остановки, а также регулировочные торможения. С системой автоматического управления поездами непосредственно связаны такие системы обеспечения безопасности, как система автоматического управления тормозами (САУТ), система автоматической локомотивной сигнализации (АЛСН), система интервального регулирования и др., а также устройства внутренней локомотивной (поездной) автоматики — устройства автоматического пуска, исполнительные устройства, регуляторы скорости, устройства торможения, противобоксовочные и противогазные устройства. Часть устройств системы автоматического управления движением поездов располагается на локомотиве (бортовые поездные устройства), часть — на центральном посту управления, часть — на станциях участка.
Наибольшие сложности вызывает создание системы автоматического управления грузовыми поездами, поскольку такой поезд как объект управления обладает рядом специфических особенностей, создающих значительные трудности для автоматизации процесса его ведения. К их числу следует отнести значительный разброс массы поезда (от порожняковых до тяжеловесных поездов), сложность автоматизации процессов торможения при использовании пневматических тормозов поезда, сложность измерения пройденного пути и скорости вследствие эффектов боксования и юза колесных пар и др. Однако, несмотря на эти трудности, современный уровень развития исследований в области тяги поездов и построения автоматических систем создают предпосылки для дальнейшей разработки и внедрения систем автоматического управления ведением грузовых поездов. Несомненно, такие системы будут разработаны, а пока вождение поездов, выбор и поддержание режима ведения поезда, управление работой силовых систем тягового подвижного состава выполняют локомотивные бригады. И от того, насколько хорошо они справляются с этими задачами, во многом зависят результаты работы железных дорог.