Что такое механическая характеристика двигателя постоянного тока

Механические характеристики электродвигателей постоянного тока
1. Электродвигатели с параллельным возбуждением
На рис. 7 приведена схема включения двигателя параллельного возбуждения.
Скорость вращения двигателя может быть выражена через ток в цепи яко,ря или через электромагнитный момент на валу двигателя.
Рекламные предложения на основе ваших интересов:
Дополнительные материалы по теме:
- Оказание первой помощи пострадавшим от поражения электрическим током
- Требования техники безопасности, выполнение которых обязательно при эксплуатации электроустановок
- Общие меры безопасности при эксплуатации электрических установок
- Классификация помещений по степени опасности поражения электрическим током
- Действие электрического тока на организм человека
- Техника безопасности при эксплуатации электрооборудования
- Особенности электроснабжения установок с электрифицированным инструментом
- Преобразователи частоты и понижающие трансформаторы
- Электропривод компрессоров
Рис. 7. Схема включения двигателя постоянного тока параллельного возбуждения
Для построения механической характеристики двигателя параллельного возбуждения достаточно иметь две ее точки, так как характеристика имеет вид прямой линии (прямолинейна).
На рис. 8 приведены естественные и искусственные механические характеристики двигателя постоянного тока параллельного возбуждения.
Рис. 8. Механические характеристики двигателя постоянного тока с параллельным возбуждением
1 — естественная; 2 — искусственные при различных потоках возбуждения; 3 — искусственные при различных напряжениях; 4 — искусственные при различных сопротивлениях в цепи якоря
Искусственные механические характеристики, получаемые за счет изменения магнитного потока Ф или подводимого напряжения U (рис. 8, прямые 2 и 3), являются жесткими характеристиками, а получаемые за счет изменения сопротивления якорной цепи R — мягкими характеристиками (рис. 8, прямая 4).
Реверсирование вращения двигателя постоянного тока осуществляется изменением направления тока либо в обмотке якоря, либо в обмотке возбуждения. Переключение обмотки возбуждения практикуется реже, так как вследствие ее индуктивности время торможения возрастает по сравнению с переключением обмотки якоря.
Скоростные и механические характеристики, соответствующие условиям задачи, представлены на рис. 9.
Рис. 9. Естественная и искусственные скоростные (а) и механические (б) характеристики двигателя параллельного -возбуждения (к примеру 2)
В современных электроприводах часто возникает необходимость останавливать производственный механизм или изменять направление его движения. Эти операции можно осуществлять переводом электродвигателя в тормозной режим работы по одной из механических характеристик, отвечающих выбранному способу электрического торможения. Механические характеристики двигателя с параллельным возбуждением для различных режимов работы представлены на рис. 10.
Рис. 10. Механические характеристики двигателя с параллельным возбужденней при различных режимах работы
В этом режиме ток и момент на валу двигателя отрицательны. Рассматриваемый тормйзной режим работы электродвигателя создается автоматически, без каких-либо переключений в нормальной схеме, если ток возбуждения увеличивается или скорость вращения двигателя повышается сверх возможной скорости п0. В этом случае электрическая машина работает как генератор, отдавая электрическую энергию в сеть. Развиваемый машиной тормозной момент уравновешивается движущим моментом, приложенным к валу. Этот способ торможения применяется в крановых и других установках при спуске груза. Генераторное торможение в электроприводах с частыми пусками и остановками является весьма экономичным, поскольку оно сопровождается отдачей электроэнергии в сеть.
Генераторное торможение с отдачей энергии в сеть.
Механические характеристики машины в режиме генераторного торможения с отдачей энергии в сеть являются естественным продолжением характеристик двигательного режима в область квадранта II (см. рис. 10).
Генераторное торможение при замыкании якоря машины на сопротивление (динамическое торможение).
Механические характеристики машины в рассматриваемом режиме проходят через начало координат, располагаясь в квадранте II (см. рис. 10), так как при положительном значении скорости вращения ток и момент отрицательны по знаку. Жесткость характеристик уменьшается с увеличением сопротивления якорной цепи. В режиме динамического торможения машина работает генератором за счет кинетической энергии, накопленной во вращающихся инерционных массах электропривода и производственного механизма.
Схема включения двигателя, позволяющая перевести его в режим динамического торможения, приведена на рис. 11. Для осуществления торможения якорь двигателя необходимо отключить от сети контактором К и замкнуть его на сопротивление Rn контактором КТ. Обмотка возбуждения при этом остается включенной в сет‘ь так же, как и в двигательном режиме. Якорь двигателя, как уже указывалось, будет продолжать вращаться за счет кинетической энергии, запасенной в движущихся частях привода. Возникающая при этом э. д. с. ея вызовет ток в цепи якоря. Направление э. д. с. сохранится то же, что и в двигательном режиме, а ток и момент двигателя изменят свое направление. Двигатель будет развивать тормозной момент, направленный против движения. Под его воздействием произойдет быстрая остановка двигателя и связанных с ним вращающихся частей механизма.
Торможение прогивовключением. Механические характеристики двигателя в рассматриваемом режиме являются продолжением в квадрант IV механических характеристик двигательного режима (см. рис. 10).
Режим противовключения имеет место, когда момент на валу от груза (в подъемных механизмах) оказывается больше предельного момента, который может развивать электродвигатель в двигательном ‘режиме. В этом случае груз под действием своего веса начнет опускаться, что приведет к вращению электродвигателя в сторону’, противоположную той, которая определяется полярностью приложенного напряжения при данном включении обмоток. Направление тока при этом остается неизменным, т. е. таким же, что и в двигательном режиме; момент двигателя также сохраняет свой знак, но по отношению к новому установившемуся движению он будет являться тормозным.
Рис. 11. Схема включения двигателя при динамическом торможении
Величина тока в режиме противовключения больше, чем в двигательном режиме, поэтому и величина момента, развиваемая двигателем при торможении противо-включением, также увеличивается.
Режим противовключения часто используется в электроприводах для быстрого изменения направления их вращения—реверсирования.
Тормозной режим работы двигателя противовключе-нием может быть использован и для быстрой остановки производственного механизма. Для этого надо изменить полярность напряжения на зажимах обмотки якоря. Схема включения двигателя при торможении противовключением представлена на рис. 12. До перехода в режим противовключения якорь двигателя подключен к сети контактором КВ. Для осуществления торможения якорь двигателя отключается от сети этим контактором и снова включается в сеть контактором КН. При этом изменяется полярность напряжения на обмотке якоря и направление тока в нем. Двигатель создает тормозной момент и начинает останавливаться. Ограничение тока якоря в тормозном режиме производится путем включения добавочного сопротивления RB в цепь якоря. Переключение двигателя с помощью контакторов происходит автоматически, и скорость вращения двигателя за время переключения практически не изменяется.
Рис. 12. Схема включения двигателя при торможении противовключением
Следует иметь в виду, что если якорь двигателя не будет отключен от сети при скорости, близкой к нулю, то в соответствии со схемой включения двигателя начнется разбег его в обратном направлении.
При торможении противовключением двигатель Не только преобразует кинетическую энергию, запасенную в движущихся частях, в электрическую, но и потребляет энергию из сети. Энергия затрачивается (теряется) на нагрев сопротивлений в цепи якоря.
Из последнего равенства следует, что между моментом электродвигателя с последовательным возбуждением и его скоростью в области небольших нагрузок (ненасыщенная магнитная цепь) существует гиперболическая зависимость.
Механические характеристики электродвигателя с последовательным возбуждением при различных режимах работы приведены на рис. 14.
2. Электродвигатели с последовательным возбуждением
На рис. 13 приведена схема включения двигателя последовательного возбуждения.
Уравнение скоростной характеристики электродвигателя с последовательным возбуждением то же, что и для электродвигателя с параллельным возбуждением.
Поскольку магнитный поток пропорционален величине тока, можно, подставляя в формулу значение из равенства, получить путем преобразований выражение механической характеристики для двигателя с последовательным возбуждением:
Рис. 13. Схема включения двигателя постоянного тока последовательного возбуждения
Рис. 14. Механические характеристики двигателя с последовательным возбуждением при различных режимах работы
Анализ характера механической характеристики электродвигателя с последовательным возбуждением позволяет сделать следующие выводы:
а) при нагрузках ниже 20—25% номинальной работа электродвигателя на естественной характеристике практически недопустима из-за чрезмерного увеличения скорости вращения якоря (рис. 14, кривая 1);
б) с увеличением дополнительного сопротивления в цепи якоря жесткость механической характеристики уменьшается и она смещается вниз (рис. 14, кривая 2);
в) кривая механической характеристики асимптотически, как это следует из рис. 14, приближается к оси ординат, не пересекаясь с ней, из чего следует, что повышением скорости вращения нельзя перевести электродвигатель с последовательным возбуждением в генераторный режим работы с отдачей энергии в сеть (как это возможно у машины с параллельным возбуждением).
Для торможения машины с последовательным возбуждением обычно применяют противовключение или динамическое торможение.
При торможении противовключением механические характеристики являются продолжением характеристик двигательного режима в область отрицательной скорости. При этом в цепь двигателя вводится дополнительное сопротивление для ограничения тока. Двигатель с последовательным возбуждением работает в режиме противовключения при перемене полярности якоря. В обмотке возбуждения направление тока должно оставаться неизменным.
При динамическом торможении механические характеристики двигателя расположены в квадранте II. Тормозной момент в режиме динамического торможения при самовозбуждении уменьшается со снижением скорости машины.
Более эффективным является динамическое торможение с независимым возбуждением. В этом случае обмотка якоря отключается от сети и замыкается на внешнее сопротивление, а обмотка возбуждения подсоединяется к сети через дополнительное сопротивление. Поскольку в последнем случае двигатель работает генератором с независимым возбуждением, его характеристики подобны характеристикам двигателя с параллельным возбуждением при динамическом торможении. Эти характеристики прямолинейны и все пересекаются в начале координат, обладая большей жесткостью при меньших сопротивлениях.
Рис. 15. Схема включения двигателя в режиме динамического торможения при независимом питании обмотки возбуждения от сети
На рис. 15 приведена схема включения двигателя в режиме динамического торможения при независимом питании обмотки возбуждения от сети,
Двигатели постоянного тока, как обладающие большим пусковым моментом и выдерживающие значительные кратковременные перегрузки, нашли широкое применение в электроприводе крупных экскаваторов. К недостаткам применения двигателей постоянного тока относится необходимость установки преобразователей переменного тока в постоянный для питания этих двигателей.
Электрические машины — Характеристики двигателя постоянного тока
при и .
Уравнение механической характеристики получается из (6.7)
. (6.8)
На рис. 6.42 представлены механические характеристики при различных способах возбуждения. Механическая характеристика двигателя параллельного возбуждения при небольшой размагничивающей реакции якоря () имеет слабо падающий характер (кривая 1).
Если размагничивающая реакция двигателя параллельного возбуждения велика (поток Ф существенно снижается при увеличении нагрузки), то механическая характеристика будет иметь положительный наклон (кривая 1′). Такая характеристика, как правило, не позволяет получить установившийся режим.
Действительно, запишем уравнение моментов в малых приращениях
.
Решение этого уравнения
,
где С — постоянная, определяемая начальными условиями; — разность частных производных электромагнитного и внешнего моментов.
Решение будет устойчивым ( при ), если , т.е. .
Для постоянной нагрузки характеристика 1′ не удовлетворяет этому условию.
В двигателях последовательного возбуждения результирующий поток пропорционален току якоря,
,
а электромагнитный момент пропорционален квадрату тока якоря,
.
С учетом этих соотношений уравнение механической характеристики двигателя последовательного возбуждения приобретает вид
. (6.9)
Этому уравнению соответствует кривая 2 (рис. 6.42), имеющая гиперболический характер. При частота вращения якоря , поэтому двигатели последовательного возбуждения не могут работать в режиме холостого хода.
Вместе с тем квадратичная зависимость электромагнитного момента от тока якоря дает важное преимущество двигателям последовательного возбуждения при перегрузках перед двигателями параллельного возбуждения, момент которых является линейной функцией тока . Это преимущество особенно существенно при пуске, так как при одном и том же пусковом токе () двигатели последовательного возбуждения развивают больший момент, чем двигатели параллельного возбуждения. Поэтому двигатели последовательного возбуждения получили широкое применение на транспортных установках, где пусковой режим является одним из основных режимов работы.
Механическая характеристика двигателя смешанного возбуждения (кривая 3 рис. 6.42) занимает промежуточное положение. Обладая близкими с двигателями последовательного возбуждения свойствами при перегрузках, двигатели смешанного возбуждения могут работать и при малых нагрузках, что позволяет осуществить рекуперацию энергии в сеть при (рис. 6.42), так как машина переходит в генераторный режим (). Это свойство можно использовать в транспортных установках при движении с горы, создавая тормозной момент и одновременно возвращая в сеть запасенную кинетическую энергию.
Электромеханические свойства двигателей постоянного тока

Двигатели постоянного тока с плавным регулированием частоты вращения находят применение в приводах различных машин, станков и установок. Наряду с широким пределом регулирования частоты вращения они дают возможность получать механические характеристики различной (требуемой) жесткости.
Из курса электротехники известно, что уравнение механической характеристики [ n =f(M) ] можно записать в виде

где коэффициенты Се и См зависят от конструктивных данных двигателя; U — напряжение сети; Ф — магнитный поток двигателя; R — сопротивление цепи якоря.
Формула показывает, что если U, R и Ф постоянны, механическая характеристика двигателя параллельного возбуждения представляет прямую линию (рис.). Если в цепи якоря нет сопротивлений, то механическая характеристика естественная (прямая 1, рис.а). Точка А соответствует номинальной частоте вращения n н, а n o называют частотой идеального холостого хода. Жесткость характеристики определяется сопротивлением двигателя R’, куда входит сопротивление обмотки якоря, дополнительных полюсов, компенсационной обмотки, щеток. Влияние сопротивления в цепи якоря на характеристику иллюстрируется прямыми 2 и 3 (см. рис.а).
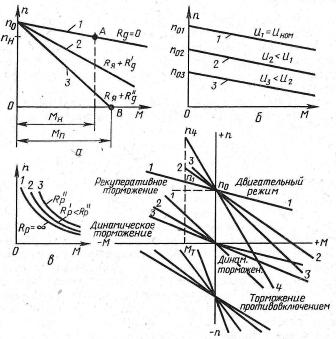
Рис. 1. Механические характеристики двигателей постоянного тока: а — при изменении сопротивления в цепи ротора, б — при изменении напряжения в цепи якоря двигателя постоянного тока с независимым возбуждением, в — при регулировании частоты вращения шунтированием обмотки возбуждения двигателя с последовательным возбуждением, г — при различных режимах торможения.
Формула позволяет оценить влияние напряжения U и потока Ф. При изменении U механическая характеристика двигателя с независимым возбуждением смещается параллельно естественной (рис.б); частота вращения холостого хода при постоянных R и U изменяется обратно пропорционально потоку.
Из формулы при n = 0 имеем

т. е. пусковой момент пропорционален потоку.
Таким образом, частота вращения двигателя может регулироваться изменением магнитного потока, напряжения, подводимого к обмотке якоря, введением сопротивлений в цепь якоря.
Регулирование частоты вращения двигателя изменением Ф применяют довольно часто, так как регулирование происходит плавно, без больших потерь энергии, поддается автоматизации. Диапазон регулирования в сторону увеличения частоты вращения не превышает 1:4, его можно расширить введением небольшой стабилизирующей обмотки последовательного возбуждения наряду с обмоткой дополнительных полюсов.
Регулирование частоты вращения изменением напряжения, подаваемого в цепь якоря двигателя, широко используют у двигателя независимого возбуждения (рис.б). В настоящее время выпускают двигатели с диапазоном регулирования до 1:8, диапазон увеличивается при применении тиристорных преобразователей.
Телеграмм канал для тех, кто каждый день хочет узнавать новое и интересное: Школа для электрика
Если Вам понравилась эта статья, поделитесь ссылкой на неё в социальных сетях. Это сильно поможет развитию нашего сайта!
Не пропустите обновления, подпишитесь на наши соцсети:
Ранее на эту тему: Электропривод
Механические характеристики электродвигателей и производственных механизмов

Механические характеристики любых механизмов играют важную роль во время конструирования электропривода, ведь любая деталь влияет на его работу.
Механическая характеристика – это зависимость нескольких факторов между собой. В случае характеристики механизма, то это пропорция угловой скорости на момент сопротивления механизма.
Существует порядка четырёх видов характеристик механизмов:
- Х-ка с моментом сопротивления (который никак не связан с темпом). Пример: подъемные краны, лебедки и прочее.
- Х-ка с моментом сопротивления, который связан со скоростью (линейная зависимость). Пример: генератор постоянного тока.
- Х-ка с нелинейным ростом момента сопротивления. Пример: вентилятор, гребной винт.
- Х-ка со спадающим сопротивлением (нелинейно). Пример: токарный станок.
Характеристика электродвижка — отношение угловой скорости к вращающему моменту. Для того чтобы оценить свойства характеристик существует их жёсткость.
Мягкая характеристика — темп сильно меняется при слабом изменении загрузки. Примером может быть двигатель с постоянным типом напряжения.
Жесткая характеристика — темп меняется при меняющейся загрузке. Пример: движок постоянного тока (синхронное возбуждение).
Абсолютно жесткая характеристика — константный темп оборотов движка во время меняющейся загрузки мотора. Пример: синхронный двигатель.
Естественная механическая характеристика — когда двигатель работает в условиях исходных параметров. Двигатель каждого вида имеет только одну такую характеристику. В отличие от других, которые имеют бесконечное число.