Асинхронные электродвигатели

Самый простой и в тоже время емкий ответ на вопрос — что такое электрический двигатель? Звучит следующим образом: устройство, преобразующее электрическую энергию в механическую (вращательную). В настоящее время принято делить электрические двигатели на три основные класса:
1) асинхронные электродвигатели (АД);
2) синхронные двигатели (СД);
3) двигатели постоянного тока (ДПТ);
Асинхронные электродвигатели получили наибольшее распространение в промышленности, сельском хозяйстве и в других отраслях, т.к. они обладают низкой ценой, приемлемыми рабочими характеристиками, надежны и не требуют дополнительного обслуживания.
Асинхронные электродвигатели состоят из двух основных частей разделенных между собой воздушным зазором:
1) неподвижная — статор;
2) и вращающаяся — ротор.

Сердечник статор набирается из листов электротехнической стали и плотно запрессовывается в станину электродвигателя. В свою очередь на внутренней стороне сердечника статора проделываются сплошные пазы, в которые специальным образом укладываются, как правило, медные обмотки круглого или прямоугольного сечения. Таких обмоток в асинхронном электродвигателе три и называются они фазами, начала и концы которых выводятся в клеммную коробку, расположенную на корпусе электродвигателя.
Роторы в асинхронных электродвигателях бывают двух типов:
1) короткозамкнутый ротор (АД с КЗ ротором);
2) фазный ротор (АД с фазным ротором).
Роторы обоих типов состоят из сердечника, жестко закрепленного на валу электродвигателя. Как и в статоре, сердечник ротора для компенсации вихревых токов набирается из тонких листов электротехнической стали. На внешней стороне ротора тоже проделываются пазы, в которые укладывается роторная обмотка.
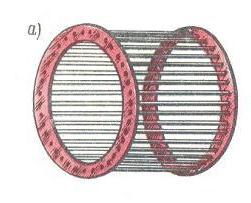
В пазы сердечника короткозамкнутого ротора укладываются стержни, соединенные с торцов торцевыми кольцами. Такой тип соединения обмоток напоминает беличье колесо, а ротор такого типа по аналогии принято называть “беличьей клеткой”.
Обмотка фазного ротора намного сложнее и состоит, как и обмотка статора, из трех фаз. А для обеспечения электрического контакта обмоток ротора с внешней цепью, на его валу располагается система из специальных колец и щеток. Асинхронные электродвигатели с фазным ротором получили меньшее распространение по сравнению с электродвигателями с короткозамкнутым ротором в силу их сложности.
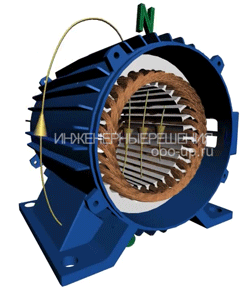
С обоих боков статор прикрыт щитами, с смонтированными в центре них подшипниками, на которых ротор подвешивается внутри статора и может свободно вращаться.
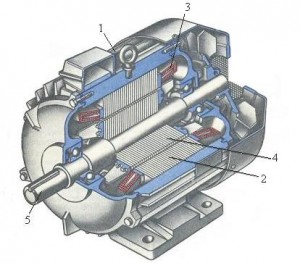
Электровигатель в разрезе
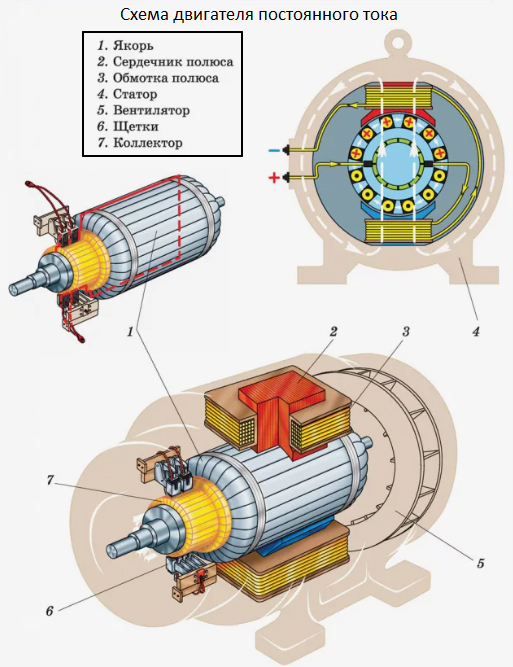
Якорь электродвигателя постоянного тока
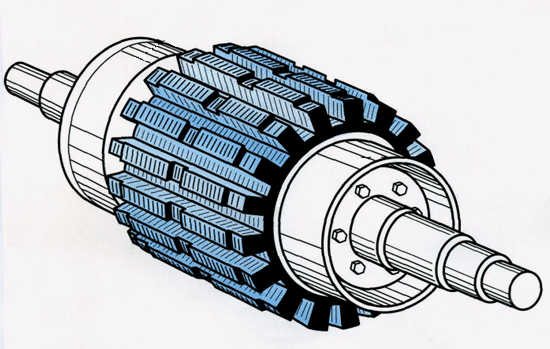
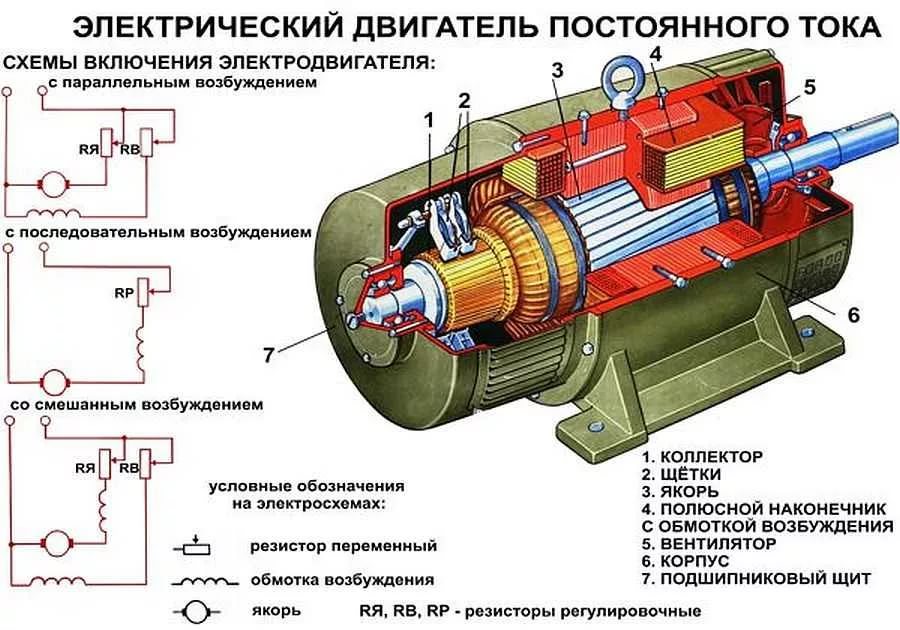
Электродвигатель постоянного тока (ЭДПТ) — устройство, преобразующее электрическую энергию в механическую. Он состоит из нескольких компонентов, каждый из которых выполняет определенную функцию. Одним из основных, наряду с подшипниковыми щитами, коллектором, щеткодержателем, является якорь (ротор), который устанавливается внутри статора (неподвижной части силовой установки) и способен вращаться внутри магнитного поля. От надежности элемента, его устойчивости к физическим, эксплуатационным нагрузкам зависит способность устройства вырабатывать ток.
Что это такое?
Любой якорь электродвигателя постоянного тока — центральная часть внутри оборудования, где образуется механическая энергия. Он представляет собой сердечник из магнитного материала (железа), на который намотаны медные провода. Основой работы является взаимодействие магнитных полей. Когда ток поступает через провода, возникает электромагнитное поле вокруг проводов, которое взаимодействует со статором, что вызывает вращение элемента вокруг своей оси.
Перемещение создает механическую энергию, которая используется для привода различных механизмов, машин и устройств. Конструкция и функциональность имеют решающее значение для работы любого двигателя. Понимание работы ротора помогает инженерам в области электротехники создавать более эффективные, надежные моторы для различных сфер производства.
Функции компонента
Рассмотрим основные функции якоря в электродвигателе постоянного тока:
- Преобразование электрической энергии в механическую. Он является ключевым элементом, преобразующим электрическую энергию, подаваемую на двигатель, во вращательное движение.
- Создание вращательного момента. Под воздействием магнитных полей образуется вращательный момент, который приводит в движение вал, подключенные к нему устройства.
- Обеспечение стабильной работы. Ротор — элемент, подверженный нагрузке при работе механизма. Поэтому конструкция, материалы подбираются так, чтобы обеспечить долговечность и стабильность функционирования.
Важнейшая функция — намагничивание и размагничивания сердечника при прохождении тока через обмотку. Когда ток проходит через медные провода обмотки, индуцируется магнитные поля в сердечнике.
Устройство якоря
Конструкция якоря в электродвигателе постоянного тока — сложная система, состоящая из нескольких ключевых компонентов. Все они взаимодействуют для обеспечения функционирования двигателя. Рассмотрим подробней главные компоненты:
-
- Обмотка. Обмотанный проводник, через который проходит напряжение, создается магнитное поле. Обмотка якоря электродвигателя постоянного тока вызывает вращение внутри статора.
- Железные сердечники. Содержит сердечники из магнитного материала (стали), которые усиливают магнитное поле, создаваемое обмоткой якоря.
- Коммутатор. Устройство, состоящее из контактов, сегментов, которые переносят электрический ток с внешнего источника питания на обмотку. Позволяет изменять ток в обмотке для поддержания вращения якоря в требуемом направлении.
- Катушки проводов. Соединяют обмотку с коммутатором, обеспечивая передачу вырабатываемого тока. Узел также содержит множество медных, прочих проводящих материалов в виде сегментов, к которым подключены катушки. Они взаимодействуют друг с другом, обеспечивая вращение внутри электродвигателя.
Особенности якоря в электродвигателе постоянного тока
Сердечник ротора состоит из пластин кремнистой электротехнической стали (в виде колец). Внутри проштампованы специальные пазы, имеются круглые отверстия для эффективного воздушного охлаждения. Это снижает уровень вихревых токов. Для повышения КПД напряжение на электродвигатель постоянного тока подается через одно- или двуполярные импульсы.
Амплитуда равна номинальному напряжению питания, пропорциональна управляющему сигналу. Механические свойства электродвигателя постоянного тока при импульсном способе регулировки зависят от характера протекания тока внутри цепи ротора. Этим определяется непрерывность вырабатывания электрической энергии, уровень КПД.
Виды якорей
- С постоянными магнитами. Используется в механизмах, где требуется надежное, постоянное поле. В небольших электродвигателях, датчиках, малых генераторах, замках, других устройствах.
- С переменными магнитами. Здесь происходит изменение магнитной индукции для регулировки, изменения поля. Устройства используются в системах автоматики при формировании уровня интенсивности индукции.
Точные характеристики, способы применения зависят от устройства якоря электродвигателя постоянного тока. Они могут различаться в зависимости от конкретного устройства или системы, где они используются.
Якорь — фундаментальная часть электродвигателя, определяющая его производительность, КПД, надежность. Постоянные усовершенствования применяемых материалов, конструкции способствуют повышению эффективности, расширению областей применения. При покупке выбирают надежный электродвигатель постоянного тока с плоским якорем, с гарантией производителя.
Из каких металлов состоит электродвигатель?
Корпус – важная часть любого электродвигателя, обеспечивающая его защиту и безопасность работы. Один из ключевых вопросов при изготовлении корпуса – выбор металла для его изготовления. От материала корпуса зависят такие характеристики, как прочность, теплоотвод, антикоррозионные свойства и долговечность.
Наиболее распространенным материалом для корпусов электродвигателей является чугун. Он обладает высокой прочностью, устойчивостью к ударам и износу, а также обеспечивает хороший теплоотвод. Кроме того, чугун имеет низкую стоимость и легко поддается литью, что делает его привлекательным для производителей.
В некоторых случаях для изготовления корпусов электродвигателей применяются также сталь и алюминий. Стальные корпуса отличаются высокой прочностью и устойчивостью к механическим воздействиям, алюминиевые – небольшой массой и хорошими свойствами теплоотвода.
Выработавшие свой ресурс и непригодные к ремонту двигатели часто выбрасывают. Но они могут содержать токсичные вещества, поэтому их утилизация должна соответствовать нормативам утилизации отходов от использования товаров.
Сэкономить средства и время, а также выгодно избавиться от неработающих двигателей помогут специализированные пункты приема металлолома.
Металл, из которого изготавливается корпус электродвигателя, играет важную роль в его работе. Он обеспечивает не только прочность и устойчивость конструкции, но и влияет на теплоотвод, электромагнитные свойства, а также защиту от внешних воздействий.
Основные металлы используемые в корпусе электродвигателей:
Алюминий является одним из самых популярных материалов для корпуса электродвигателя. Он отличается легкостью и хорошей коррозионной стойкостью, что позволяет использовать электродвигатель во влажных и агрессивных средах. Кроме того, алюминий обладает высокой теплопроводностью, что способствует эффективному охлаждению электродвигателя.
Чугун также широко применяется для изготовления корпуса электродвигателей. Его главное преимущество — это высокая прочность и стойкость к механическим нагрузкам. Чугунные корпуса отлично справляются с вибрацией и воздействием взрывоопасных и агрессивных сред. Кроме того, чугун является хорошим теплоизолятором, что позволяет значительно снизить потери энергии.
Сталь также используется в качестве материала для корпусов электродвигателей. Она обладает высокой прочностью и жесткостью, что позволяет использовать электродвигатель в условиях высоких нагрузок. Стальные корпуса обычно имеют повышенную коррозионную стойкость благодаря специальным покрытиям или антикоррозийной обработке.
Основные металлы из которых состоит электродвигатель:
· статор – неподвижный элементы, выполняющий функцию магнитопровода;
· ротор – ходовая часть, состоящая из витков проводов, проводящих электричество.
Конструкция мотора включает и другие металлические детали из алюминия, бронзы, меди (втулки, коллектор, токопроводящие щетки и др.) . Но не все двигатели снабжены медной обмоткой. В старой технике, произведенной ранее 1990-х годов, часто находят алюминиевые витки. Позже стало известно, что они менее прочны, а также образуют с другими металлами гальваническую пару и сильно подвержены коррозии.
Из меди делают основные компоненты электродвигателей такие как кабель, обмоточный провод, коллектор. Поэтому при производстве электромоторов нужно знать количество меди в моторе. Основными параметрами которые позволяют определить точно количество меди является вес кг. и мощность кВт. Также важно напряжение в электромоторе которая может быть 220 В, 380 В и 660 В.
Обмотка электродвигателя из медного провода
Провода обмотки необходимое для ремонта, также перемотки электродвигателя. Для этого металл специально загрязняют, что позволяет снизить пусковые токи. Намотка электродвигателя может быть выполнена из прямоугольного и круглого сечения, марка и особенности материала зависят от проволоки и изоляции. В основном изготавливается обмоточные провода из из медных деталей эй покрытые волокнистая или эмалевой изоляцией. При правильном выборе таких компонентов в дальнейшем может упростится ремонт эксплуатация. Такие компоненты выбирают с учётом восприимчивости к нагреву, влагостойкость, химическая стойкость, морозостойкости и прочности к повреждениям. Провод для перемотки двигателя как правило продают в катушках, барабанах, бухтах.
Для того что бы сдать на металлолом электродвигатель дороже, нужно разобрать его на отдельные элементы согласно разновидности металла.
Итак, разбираем на металлолом электродвигатель времен СССР марки АИР весом 80 кг. В первую очередь выкручиваем все болты передней крышки со стороны шкива.
Четыре болт а спереди и четыре сзади, возможно и они куда нибудь пригодятся.
Вставив отвертку или тонкое зубило расширив щель между крышкой и станиной статора электродвигателя постараться сдвинуть крышку. Расшатываем ее вращательными движениями в разные стороны. Выходит она очень легко и не затруднит вас. Вот и та медная проволока, из-за которой мы и затеяли эти работы с разборкой электродвигателя. Точно такими же действиями, плюс освободив крышку сальника подшипника удаляем болты. Работая молотком и зубилом двигаем крышку передка эл. движка. Если крышка сальника подшипника поддалась то и основная крышка двигателя так же начет потихоньку отходить. Действуем интенсивно и вот щель увеличивается крышка крутится вокруг своей оси. Вытаскиваем ротор электродвигателя придерживая за его шкив. Видим что один из алюминиевых лопастей двигателя погнут. Ротор или крутящийся элемент электродвигателя очень массивен и весит немало. Разрезаем болгаркой выпуклую часть рубашки охлаждения электродвигателя от начала и до конца пропиливая его внутрь пропила, в этих местах металл тоньше. Делаем это с двух сторон, пропилы рубашки статора эл. движка. Снимаем первый сегмент рубашки охлаждения статора электродвигателя. Режем так, же но уже на низах у лап крепления электродвигателя. Вынимаем второй элемент сегмента рубашки охлаждения электродвигателя. И вынимаем медную обмотку в прессованную и намотанную на металлические пластины спрессованные между собой и скрепленными скобой по бокам. Начинаем отделять боковые стопорные кольца по бокам (их 2 штуки) . Расшатывая их отверткой и потихоньку отделяем ее от основной станины. Производим эти же манипуляции и с другой стороны, отделяем и снимаем их. Ликвидируем и снимаем с медной обмотки все скрепляющие пластиковые хомуты и веревку обвязку. Начинаем вытаскивать деревянные вставки-колышки удерживающие обмотку проволоки в пазах пластин станины электро-статора. Деревянные колья вставлены по окружности статора электродвигателя и держат скрепляя медную обмотку не давая ей ни коем образом выйти из пазов статора. Вытащив все колышки, есть возможность не отпиливая проволоку, вытащить из пазов намотанных на статор. Не торопясь отматываем проволоку, в некоторых местах откусывая ее пассатижами. Примерно по 350 грамм, меньше или больше откладываем медную проволоку/обмотку в сторону.
Посмотреть актуальные цены на металлолом вы можете здесь.
Трехфазный асинхронный двигатель
Трехфазный асинхронный электродвигатель — это асинхронный электродвигатель, который имеет трехфазную обмотку статора.
Трехфазный асинхронный двигатель с короткозамкнутым ротором
Асинхронный двигатель с короткозамкнутым ротором — это асинхронный электродвигатель, у которого ротор выполнен с короткозамкнутой обмоткой в виде беличьей клетки [1].
Конструкция асинхронного электродвигателя
Трехфазный асинхронный электродвигатель, как и любой электродвигатель, состоит из двух основных частей — статора и ротора. Статор — неподвижная часть, ротор — вращающаяся часть. Ротор размещается внутри статора. Между ротором и статором имеется небольшое расстояние, называемое воздушным зазором, обычно 0,5-2 мм.
Статор состоит из корпуса и сердечника с обмоткой. Сердечник статора собирается из тонколистовой технической стали толщиной обычно 0,5 мм, покрытой изоляционным лаком. Шихтованная конструкция сердечника способствует значительному снижению вихревых токов, возникающих в процессе перемагничивания сердечника вращающимся магнитным полем. Обмотки статора располагаются в пазах сердечника.

Ротор состоит из сердечника с короткозамкнутой обмоткой и вала. Сердечник ротора тоже имеет шихтованную конструкцию. При этом листы ротора не покрыты лаком, так как ток имеет небольшую частоту и оксидной пленки достаточно для ограничения вихревых токов.
Принцип работы. Вращающееся магнитное поле
Принцип действия трехфазного асинхронного электродвигателя основан на способности трехфазной обмотки при включении ее в сеть трехфазного тока создавать вращающееся магнитное поле.
Вращающееся магнитное поле — это основная концепция электрических двигателей и генераторов.
Остановить
Вращающееся магнитное поле асинхронного электродвигателяЧастота вращения этого поля, или синхронная частота вращения прямо пропорциональна частоте переменного тока f1 и обратно пропорциональна числу пар полюсов р трехфазной обмотки.
- где n1 – частота вращения магнитного поля статора, об/мин,
- f1 – частота переменного тока, Гц,
- p – число пар полюсов
Концепция вращающегося магнитного поля
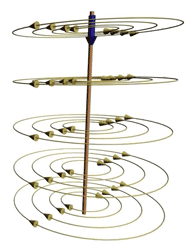
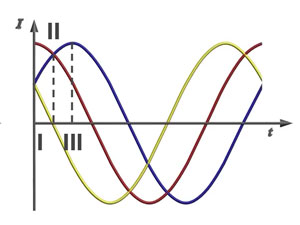
Чтобы понять феномен вращающегося магнитного поля лучше, рассмотрим упрощенную трехфазную обмотку с тремя витками. Ток текущий по проводнику создает магнитное поле вокруг него. На рисунке ниже показано поле создаваемое трехфазным переменным током в конкретный момент времени
Остановить
Магнитное поле прямого проводника с постоянным током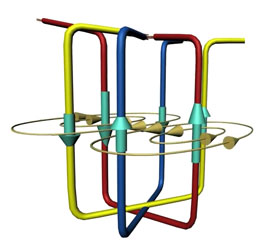
Составляющие переменного тока будут изменяться со временем, в результате чего будет изменяться создаваемое ими магнитное поле. При этом результирующее магнитное поле трехфазной обмотки будет принимать разную ориентацию, сохраняя при этом одинаковую амплитуду.
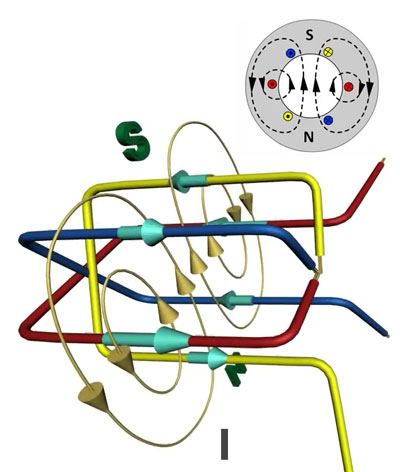
Действие вращающегося магнитного поля на замкнутый виток
Теперь разместим замкнутый проводник внутри вращающегося магнитного поля. По закону электромагнитной индукции изменяющееся магнитное поле приведет к возникновению электродвижущей силы (ЭДС) в проводнике. В свою очередь ЭДС вызовет ток в проводнике. Таким образом, в магнитном поле будет находиться замкнутый проводник с током, на который согласно закону Ампера будет действовать сила, в результате чего контур начнет вращаться.
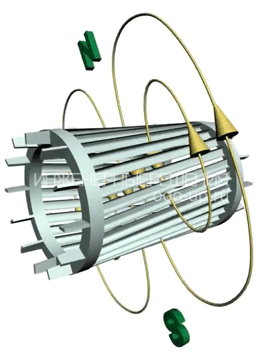
Короткозамкнутый ротор асинхронного двигателя
По этому принципу также работает асинхронный электродвигатель. Вместо рамки с током внутри асинхронного двигателя находится короткозамкнутый ротор по конструкции напоминающий беличье колесо. Короткозамкнутый ротор состоит из стержней накоротко замкнутых с торцов кольцами.

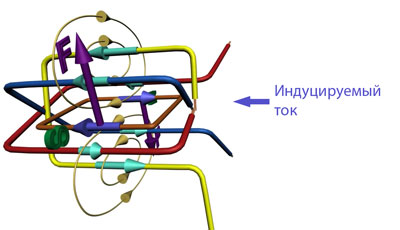
Трехфазный переменный ток, проходя по обмоткам статора, создает вращающееся магнитное поле. Таким образом, также как было описано ранее, в стержнях ротора будет индуцироваться ток, в результате чего ротор начнет вращаться. На рисунке ниже Вы можете заметить различие между индуцируемыми токами в стержнях. Это происходит из-за того что величина изменения магнитного поля отличается в разных парах стержней, из-за их разного расположения относительно поля. Изменение тока в стержнях будет изменяться со временем.
Остановить
Вращающееся магнитное поле пронизывающее короткозамкнутый ротор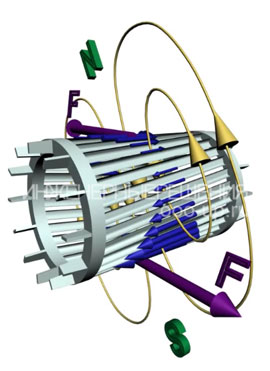
Вы также можете заметить, что стержни ротора наклонены относительно оси вращения. Это делается для того чтобы уменьшить высшие гармоники ЭДС и избавиться от пульсации момента. Если стержни были бы направлены вдоль оси вращения, то в них возникало бы пульсирующее магнитное поле из-за того, что магнитное сопротивление обмотки значительно выше магнитного сопротивления зубцов статора.
Скольжение асинхронного двигателя. Скорость вращения ротора
Отличительный признак асинхронного двигателя состоит в том, что частота вращения ротора n2 меньше синхронной частоты вращения магнитного поля статора n1.
Объясняется это тем, что ЭДС в стержнях обмотки ротора индуцируется только при неравенстве частот вращения n21. Частота вращения поля статора относительно ротора определяется частотой скольжения ns=n1-n2. Отставание ротора от вращающегося поля статора характеризуется относительной величиной s, называемой скольжением:
- где s – скольжение асинхронного электродвигателя,
- n1 – частота вращения магнитного поля статора, об/мин,
- n2 – частота вращения ротора, об/мин,
Рассмотрим случай когда частота вращения ротора будет совпадать с частотой вращения магнитного поля статора. В таком случае относительное магнитное поле ротора будет постоянным, таким образом в стержнях ротора не будет создаваться ЭДС, а следовательно и ток. Это значит что сила действующая на ротор будет равна нулю. Таким образом ротор будет замедляться. После чего на стержни ротора опять будет действовать переменное магнитное поле, таким образом будет расти индуцируемый ток и сила. В реальности же ротор асинхронного электродвигателя никогда не достигнет скорости вращения магнитного поля статора. Ротор будет вращаться с некоторой скоростью которая немного меньше синхронной скорости.
Скольжение асинхронного двигателя может изменяться в диапазоне от 0 до 1, т. е. 0—100%. Если s~0, то это соответствует режиму холостого хода, когда ротор двигателя практически не испытывает противодействующего момента; если s=1 — режиму короткого замыкания, при котором ротор двигателя неподвижен (n2 = 0). Скольжение зависит от механической нагрузки на валу двигателя и с ее ростом увеличивается.
Скольжение, соответствующее номинальной нагрузке двигателя, называется номинальным скольжением. Для асинхронных двигателей малой и средней мощности номинальное скольжение изменяется в пределах от 8% до 2%.
Преобразование энергии
Асинхронный двигатель преобразует электрическую энергию подаваемую на обмотки статора, в механическую (вращение вала ротора). Но входная и выходная мощность не равны друг другу так как во время преобразования происходят потери энергии: на трение, нагрев, вихревые токи и потери на гистерезисе. Это энергия рассеивается как тепло. Поэтому асинхронный электродвигатель имеет вентилятор для охлаждения.
Подключение асинхронного двигателя
Трехфазный переменный ток
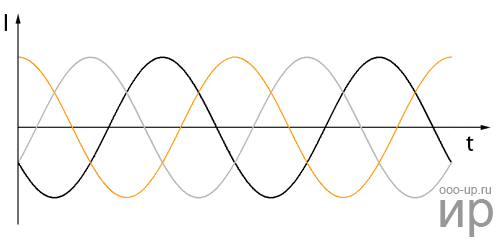
Электрическая сеть трехфазного переменного тока получила наиболее широкое распространение среди электрических систем передачи энергии. Главным преимуществом трехфазной системы по сравнению с однофазной и двухфазной системами является ее экономичность. В трехфазной цепи энергия передается по трем проводам, а токи текущие в разных проводах сдвинуты относительно друг друга по фазе на 120°, при этом синусоидальные ЭДС на разных фазах имеют одинаковую частоту и амплитуду.
Звезда и треугольник
Трехфазная обмотка статора электродвигателя соединяется по схеме «звезда» или «треугольник» в зависимости от напряжения питания сети. Концы трехфазной обмотки могут быть: соединены внутри электродвигателя (из двигателя выходит три провода), выведены наружу (выходит шесть проводов), выведены в распределительную коробку (в коробку выходит шесть проводов, из коробки три).
Фазное напряжение — разница потенциалов между началом и концом одной фазы. Другое определение для соединения «звезда»: фазное напряжение это разница потенциалов между линейным проводом и нейтралью (обратите внимание, что у схемы «треугольник» отсутствует нейтраль).
Линейное напряжение — разность потенциалов между двумя линейными проводами (между фазами).
Звезда Треугольник Обозначение 

Uл, Uф — линейное и фазовое напряжение, В, 

Iл, Iф — линейный и фазовый ток, А, 

S — полная мощность, Вт 
P — активная мощность, Вт Внимание: Несмотря на то, что мощность для соединений в звезду и треугольник вычисляется по одной формуле, подключение одного и того же электродвигателя разным способом в одну и туже электрическую сеть приведет к потреблению разной мощности. При этом не правильное подключение электродвигателя, может привести к расплавлению обмоток статора.
Пример: Допустим электродвигатель был подключен по схеме «звезда» к трехфазной сети переменного тока Uл=380 В (соответственно Uф=220 В) и потреблял ток Iл=1 А. Полная потребляемая мощность:
S = 1,73∙380∙1 = 658 Вт.
Теперь изменим схему соединения на «треугольник», линейное напряжение останется таким же Uл=380 В, а фазовое напряжение увеличится в корень из 3 раз Uф=Uл=380 В. Увеличение фазового напряжения приведет к увеличению фазового тока в корень из 3 раз. Таким образом линейный ток схемы «треугольник» будет в три раза больше линейного тока схемы «звезда». А следовательно и потребляемая мощность будет в 3 раза больше:
S = 1,73∙380∙3 = 1975 Вт.
Таким образом, если двигатель рассчитан на подключение к трехфазной сети переменного тока по схеме «звезда», подключение данного электродвигателя по схеме «треугольник» может привести к его поломке.
Если в нормальном режиме электродвигатель подключен по схеме «треугольник», то для уменьшения пусковых токов на время пуска его можно соединить по схеме звезда. При этом вместе с пусковым током уменьшится также пусковой момент.
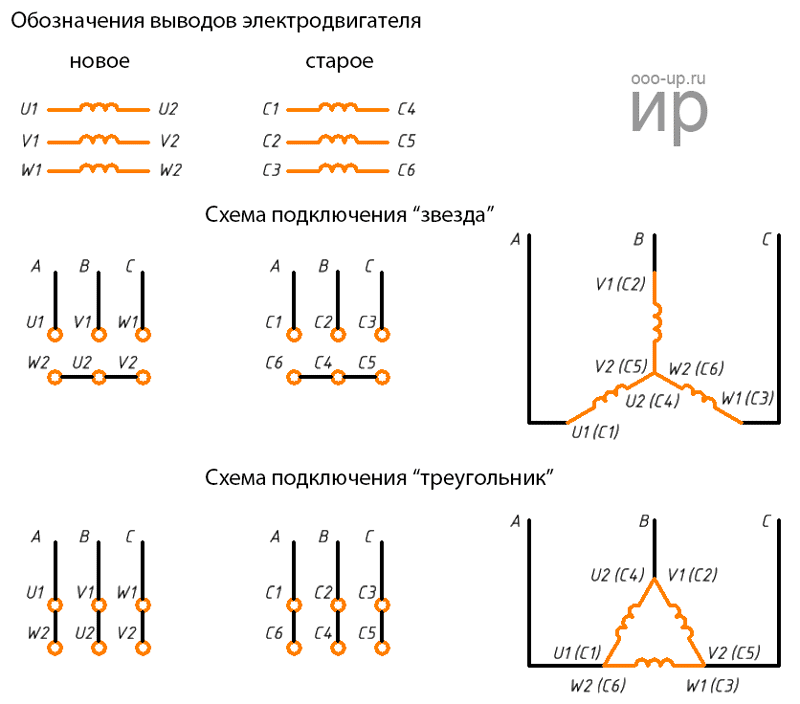
Обозначение выводов статора трехфазного электродвигателя
Обозначение выводов обмоток статора вновь разрабатываемых трехфазных машин согласно ГОСТ 26772-85 [2]
Схема соединения обмоток, наименование фазы и вывода Обозначение вывода Начало Конец Открытая схема (число выводов 6) первая фаза U1 U2 вторая фаза V1 V2 третья фаза W1 W2 Соединение в звезду (число выводов 3 или 4) первая фаза U вторая фаза V третья фаза W точка звезды (нулевая точка) N Соединение в треугольник (число выводов 3) первый вывод U второй вывод V третий вывод W Обозначение выводов обмоток статора ранее разработанных и модернизируемых трехфазных машин согласно ГОСТ 26772-85
Схема соединения обмоток, наименование фазы и вывода Обозначение вывода Начало Конец Открытая схема (число выводов 6) первая фаза C1 C4 вторая фаза C2 C5 третья фаза C3 C6 Соединение звездой (число выводов 3 или 4) первая фаза C1 вторая фаза C2 третья фаза C3 нулевая точка 0 Соединение треугольником (число выводов 3) первый вывод C1 второй вывод C2 третий вывод C3 Подключение трехфазного асинхронного двигателя к однофазной сети с помощью фазосдвигающего элемента
Трехфазные асинхронные электродвигатели могут быть подключены к однофазной сети с помощью фазосдвигаюших элементов. При этом электродвигатель будет работать либо в режиме однофазного двигателя с пусковой обмоткой (рисунок а, б, г) либо в режиме конденсаторного двигателя с постоянно включенным рабочим конденсатором (рисунок в, д, е).
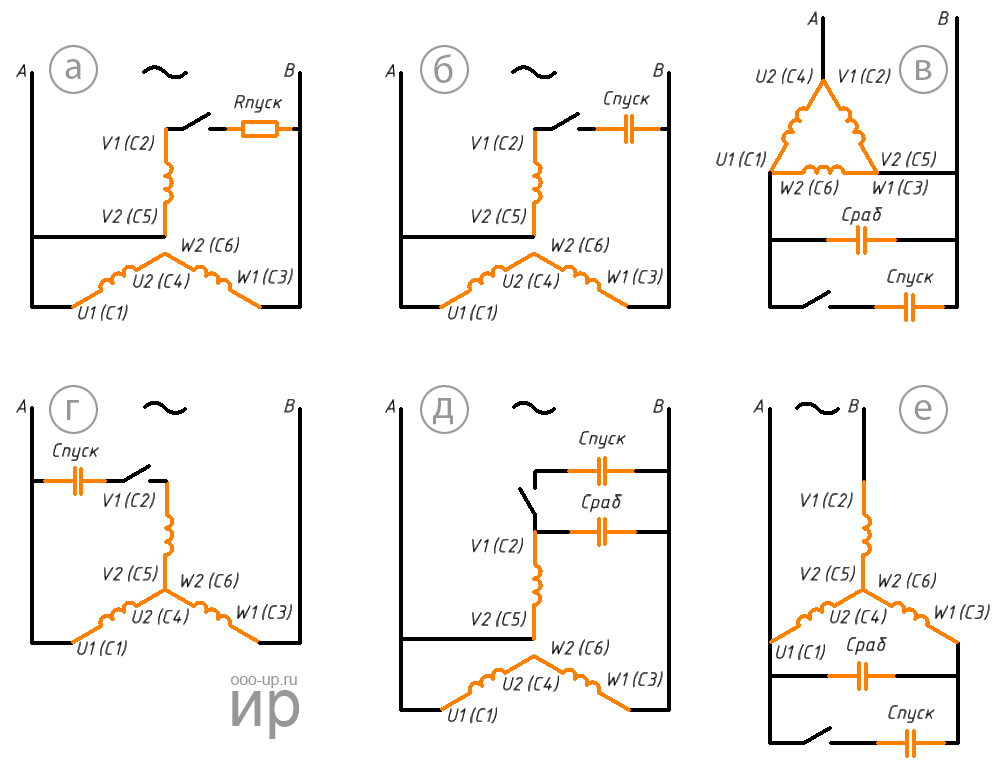
Схемы приведенные на рисунке «а», «б», «д» применяются, когда выведены все шесть концов обмотки. Электродвигатели с соединением обмоток согласно схемам «а», «б», «г» практически равноценны двигателям, которые спроектированы как однофазные электродвигатели с пусковой обмоткой. Номинальная мощность при этом состовляет 40-50% от мощности в трехфазном режиме, а при работе с рабочим конденсатором 75-80%.
Емкость рабочего конденсатора при частоте тока 50 Гц для схем «в», «д», «е» примерно рассчитывается соответственно по формулам:
- ,где Cраб — емкость рабочего конденсатора, мкФ,
- Iном – номинальный (фазный) ток статора трехфазного двигателя, А,
- U1 – напряжение однофазной сети, В.
Управление асинхронным двигателем
-
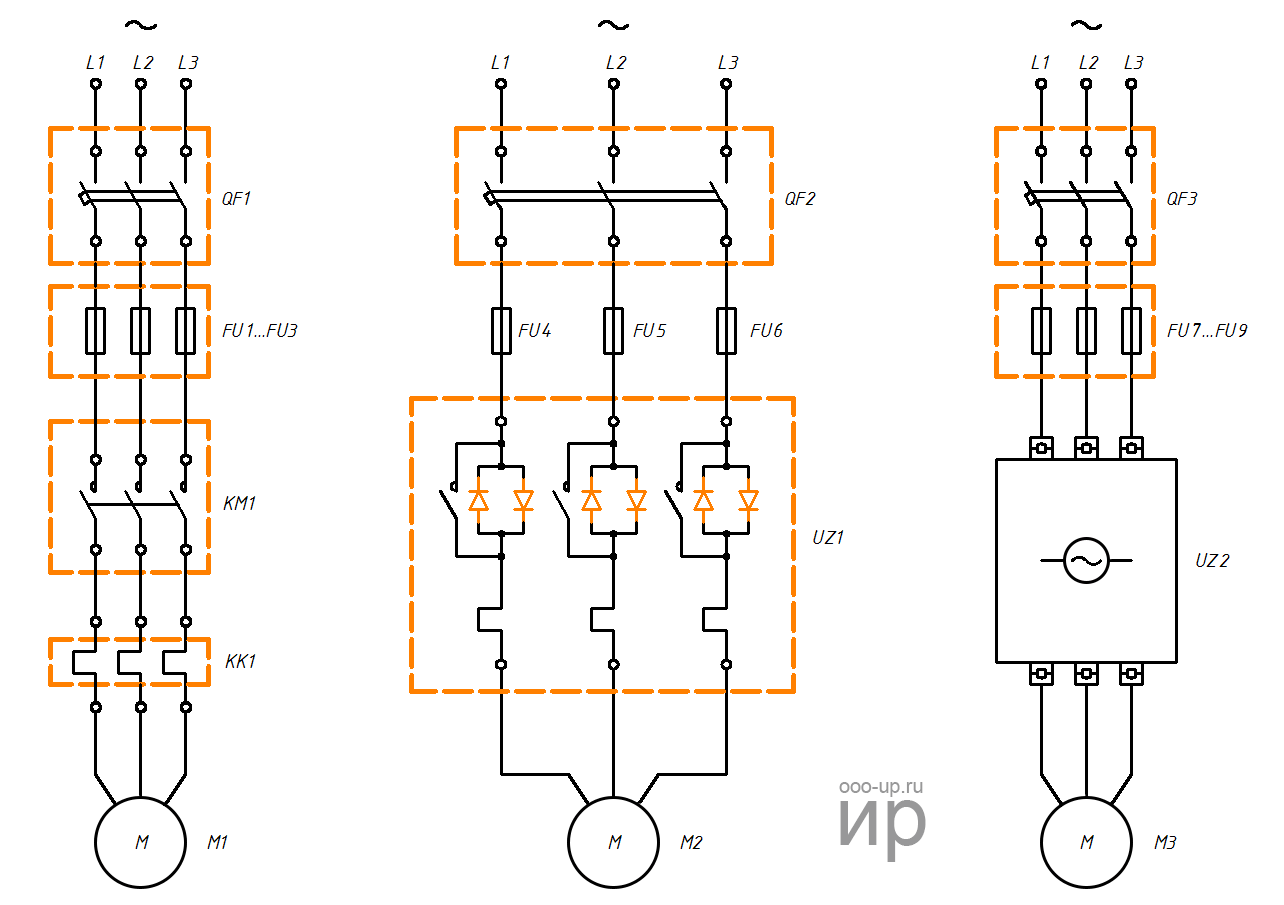
Способы подключения асинхронного электродвигателя к сети питания:
- прямое подключение к сети питания
- подключение от устройства плавного пуска
- подключение от преобразователя частоты
- нереверсивного пуска: пуск и остановка;
- реверсивного пуска: пуск, остановка и реверс.
- уменьшить энергопротребление электродвигателя;
- управлять скоростью вращения электродвигателя (плавный запуск и остановка, регулировка скорости во время работы);
- избежать перегрузок электродвигателя и тем самым увеличить его срок службы.
- скалярное управление;
- векторное управление.
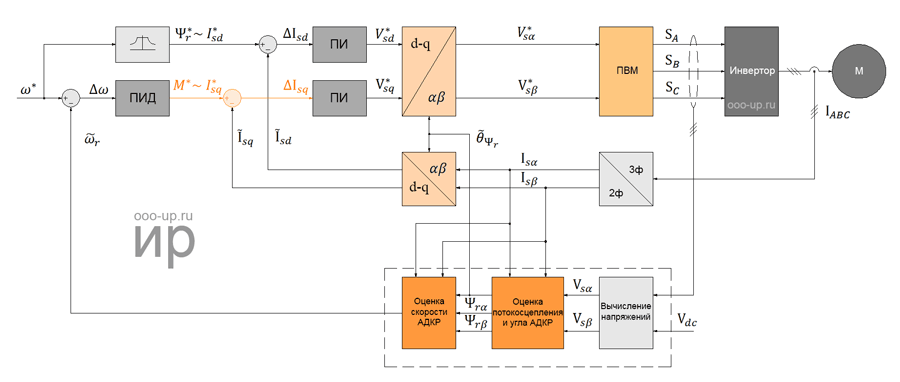
- полеориентированное управление по датчику;
- полеориентированное управление без датчика: положение потокосцепления ротора вычисляется математически на основе той информации, которая имеется в частотном преобразователе (напряжение питания, напряжения и токи статора, сопротивление и индуктивность обмоток статора и ротора, количество пар полюсов двигателя).
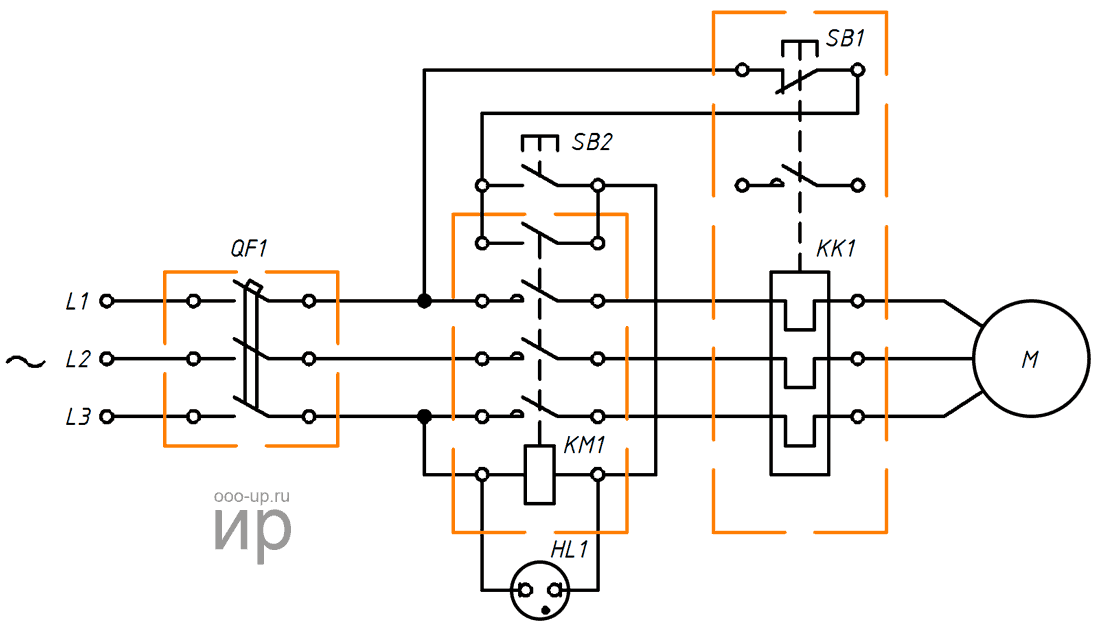
Прямое подключение к сети питания
Использование магнитных пускателей позволяет управлять асинхронными электродвигателями путем непосредственного подключения двигателя к сети переменного тока.
С помощью магнитных пускателей можно реализовать схему:
Использование теплового реле позволяет осуществить защиту электродвигателя от величин тока намного превышающих номинальное значение.
Нереверсивная схема
Реверсивная схема
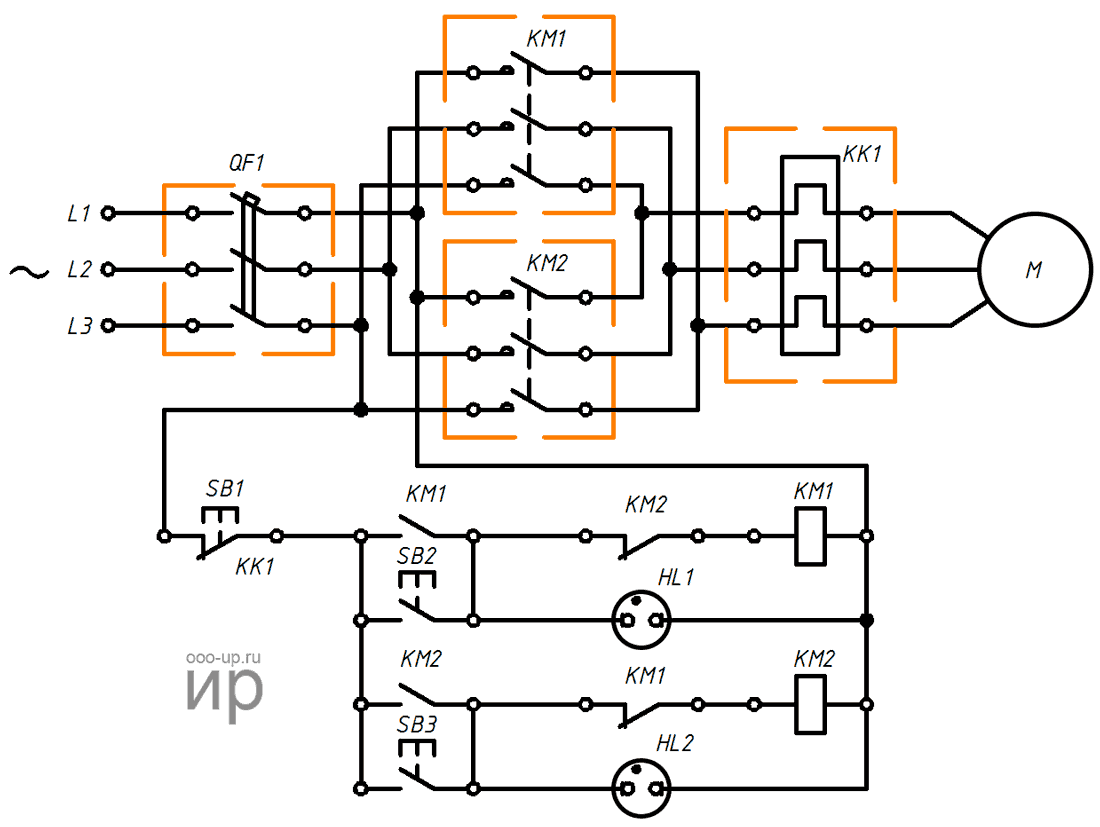
Недостатком прямой коммутации обмоток асинхронного электродвигателя с сетью является наличие больших пусковых токов, во время запуска электродвигателя.
Плавный пуск асинхронного электродвигателя
В задачах, где не требуется регулировка скорости электродвигателя во время работы для уменьшения пусковых токов используется устройство плавного пуска.
Устройство плавного пуска защищает асинхронный электродвигатель от повреждений вызванных резким увеличением потребляемой энергии во время пуска путем ограничения пусковых токов. Устройство плавного пуска позволяет обеспечить плавный разгон и торможение асинхронного электродвигателя.
Устройство плавного пуска дешевле и компактнее частотного преобразователе. Применяется там, где регулировка скорости вращения и момента требуется только при запуске.
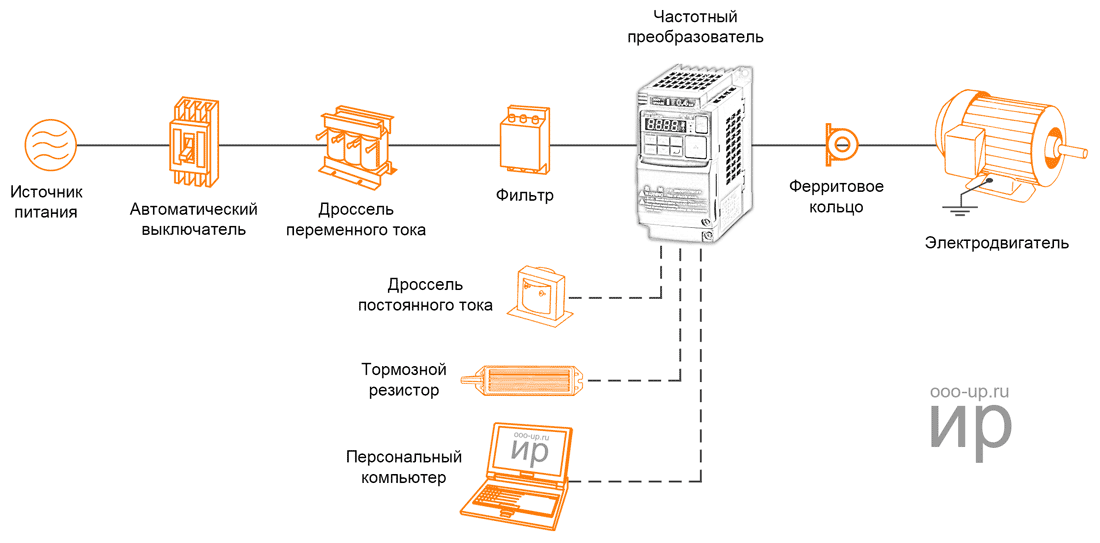
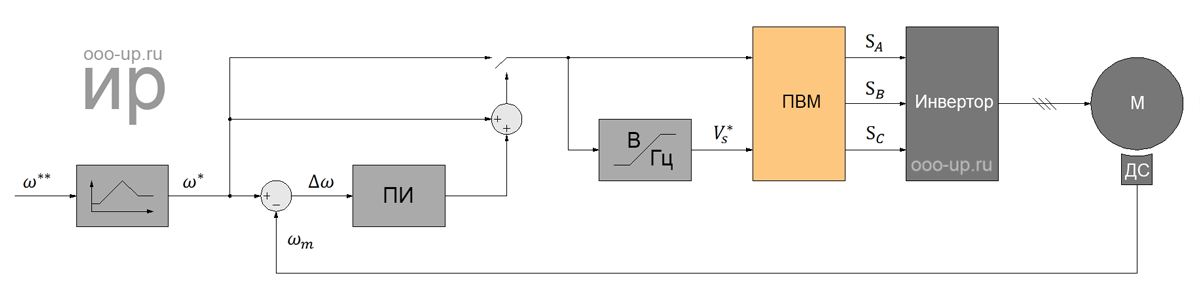
Частотное управление асинхронным электродвигателем
Для регулирования скорости вращения и момента асинхронного двигателя используют частотный преобразователь. Принцип действия частотного преобразователя основан на изменении частоты и напряжения переменного тока.
-
Использование частотного преобразователя позволяет:
-
В зависимости от функционала частотные преобразователи реализуют следующие методы регулирования асинхронным электродвигателем:
Скалярное управление является простым и дешевым в реализации, но имеет следующие недостатки — медленный отклик на изменение нагрузки и небольшой диапазон регулирования. Поэтому скалярное управление обычно используется в задачах, где нагрузка либо постоянна, либо изменяется по известному закону (например, управление вентиляторами).
Векторное управление используется в задачах, где требуется независимо управлять скоростью и моментом электродвигателя (например, лифт), что, в частности, позволяет поддерживать постоянную скорость вращения при изменяющемся моменте нагрузки. При этом векторное управление является самым эффективным управлением с точки зрения КПД и увеличения времени работы электродвигателя.
Среди векторных методов управления асинхронными электродвигателями наиболее широкое применение получили: полеориентированное управление и прямое управление моментом.
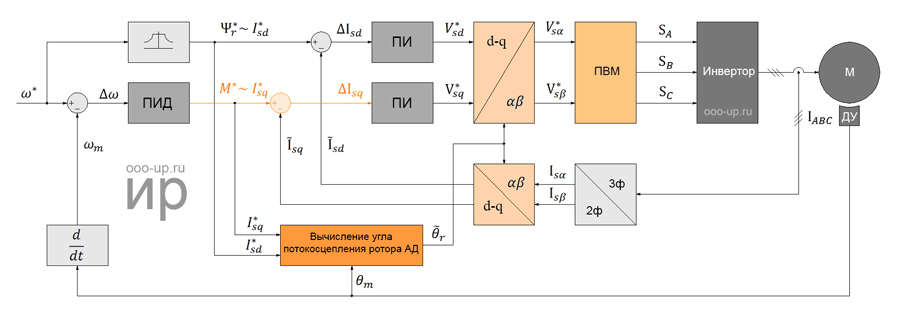
Полеориентированное управление позволяет плавно и точно управлять параметрами движения (скоростью и моментом), но при этом для его реализации требуется информация о направлениии вектора потокосцепления ротора двигателя.
-
По способу получения информации о положении потокосцепления ротора электродвигателя выделяют:
Прямое управление моментом имеет простую схему и высокую динамику работы, но при этом высокие пульсации момента и тока.
Трехфазный асинхронный двигатель с фазным ротором
Асинхронный двигатель с фазным ротором — асинхронный двигатель, у которого обмотка ротора присоединена к контактным кольцам [1].
До широкого распространения частотных преобразователей асинхронные двигатели средней и большой мощности делали с фазным ротором. Трехфазные асинхронные двигатели с фазным ротором (АДФР) обычно применяли в устройствах с тяжелыми условиями пуска, например в качестве крановых двигателей переменного тока, или же для привода устройств, требующих плавного регулирования частоты вращения.
Конструкция АДФР
Фазный ротор
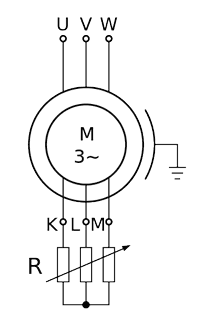
Конструктивно фазный ротор представляет из себя трехфазную обмотку (аналогичную обмотки статора) уложенную в пазы сердечника фазного ротора. Концы фаз такой обмотки ротора обычно соединяются в «звезду», а начала подключают к контактным кольцам, изолированным друг от друга и от вала. Через щетки к контактным кольцам обычно присоединяется трехфазный пусковой или регулировочный реостат. Асинхронные двигатели с фазным ротором имеют более сложную конструкцию, чем у двигателей с короткозамкнутым ротором, однако обладают лучшими пусковыми и регулировочными свойствами.

Статор АДФР
Статор асинхронного двигателя с фазным ротором по конструкции не отличается от статора асинхронного двигателя с короткозамкнутым ротором.
Обозначение выводов вторичных обмоток трехфазного АДФР
Обозначение выводов обмоток ротора вновь разрабатываемых трехфазных машин согласно ГОСТ 26772-85 [2]
| Схема соединения обмоток, наименование фазы и вывода | Обозначение вывода | |
|---|---|---|
| Начало | Конец | |
| Открытая схема (число выводов 6) | ||
| первая фаза | K1 | K2 |
| вторая фаза | L1 | L2 |
| третья фаза | M1 | M2 |
| Соединение в звезду (число выводов 3 или 4) | ||
| первая фаза | K | |
| вторая фаза | L | |
| третья фаза | M | |
| точка звезды (нулевая точка) | Q | |
| Соединение в треугольник (число выводов 3) | ||
| первый вывод | K | |
| второй вывод | L | |
| третий вывод | M | |
Обозначение выводов обмоток ротора ранее разработанных и модернизируемых трехфазных машин согласно ГОСТ 26772-85
| Схема соединения обмоток, наименование фазы и вывода | Обозначение вывода | |
|---|---|---|
| Соединение звездой (число выводов 3 или 4) | ||
| первая фаза | Р1 | |
| вторая фаза | Р2 | |
| третья фаза | Р3 | |
| нулевая точка | 0 | |
| Соединение треугольником (число выводов 3) | ||
| первый вывод | Р1 | |
| второй вывод | Р2 | |
| третий вывод | Р3 | |
Примечание: Контактные кольца роторов асинхронных двигателей обозначают так же, как присоединенные к ним выводы обмотки ротора, при этом расположение колец должно быть в порядке цифр, указанных в таблице, а кольцо 1 должно быть наиболее удаленным от обмотки ротора. Обозначение самих колец буквами необязательно.
Пуск АДФР
Пуск двигателей с фазным ротором производится с помощью пускового реостата в цепи ротора.
Применяются проволочные и жидкостные реостаты.
Металлические реостаты являются ступенчатыми, и переключение с одной ступени на другую осуществляется либо вручную с помощью рукоятки контроллера, существенным элементом которого является вал с укрепленными на нем контактами, либо же автоматически с помощью контакторов или контроллера с электрическим приводом.
Жидкостный реостат представляет собой сосуд с электролитом, в котором опущены электроды. Сопротивление реостата регулируется путем изменения глубины погружения электродов [3].
Для повышения КПД и снижения износа щеток некоторые АДФР содержат специальное устройство (короткозамкнутый механизм), которое после запуска поднимает щетки и замыкает кольца.
При реостатном пуске достигаются благоприятные пусковые характеристики, так как высокие значения моментов достигаются при невысоких значениях пусковых токов. В настоящее время АДФР заменяются комбинацией асинхронного электродвигателя с короткозамкнутым ротором и частотным преобразователем.