Инерциальная навигационная система: как это работает

Долгое время отсутствие точной информации о местоположении самолета или вертолета было серьезным препятствием на пути развития авиации. Пилотам была необходима навигационная система, которая не зависела бы от земных ориентиров и капризов природы. Появление автономных инерциальных систем навигации стало большим шагом в истории авиации. Первые инерциальные системы в нашей стране были разработаны в 1960-х годах в Раменском приборостроительном КБ, входящем сегодня в концерн «Радиоэлектронные технологии» (КРЭТ) Госкорпорации Ростех.
В автономном полете
Первые пилоты в движении ориентировались по солнцу, звездам или компасу, затем появились радиосигналы, но все эти способы зависели от внешних факторов, а значит, не были полностью надежными. Требовался навигационный прибор, анализирующий движение самолета и не использующий внешние источники информации. Все необходимое оборудование должно быть размещено на борту самолета, а система должна функционировать полностью автономно.
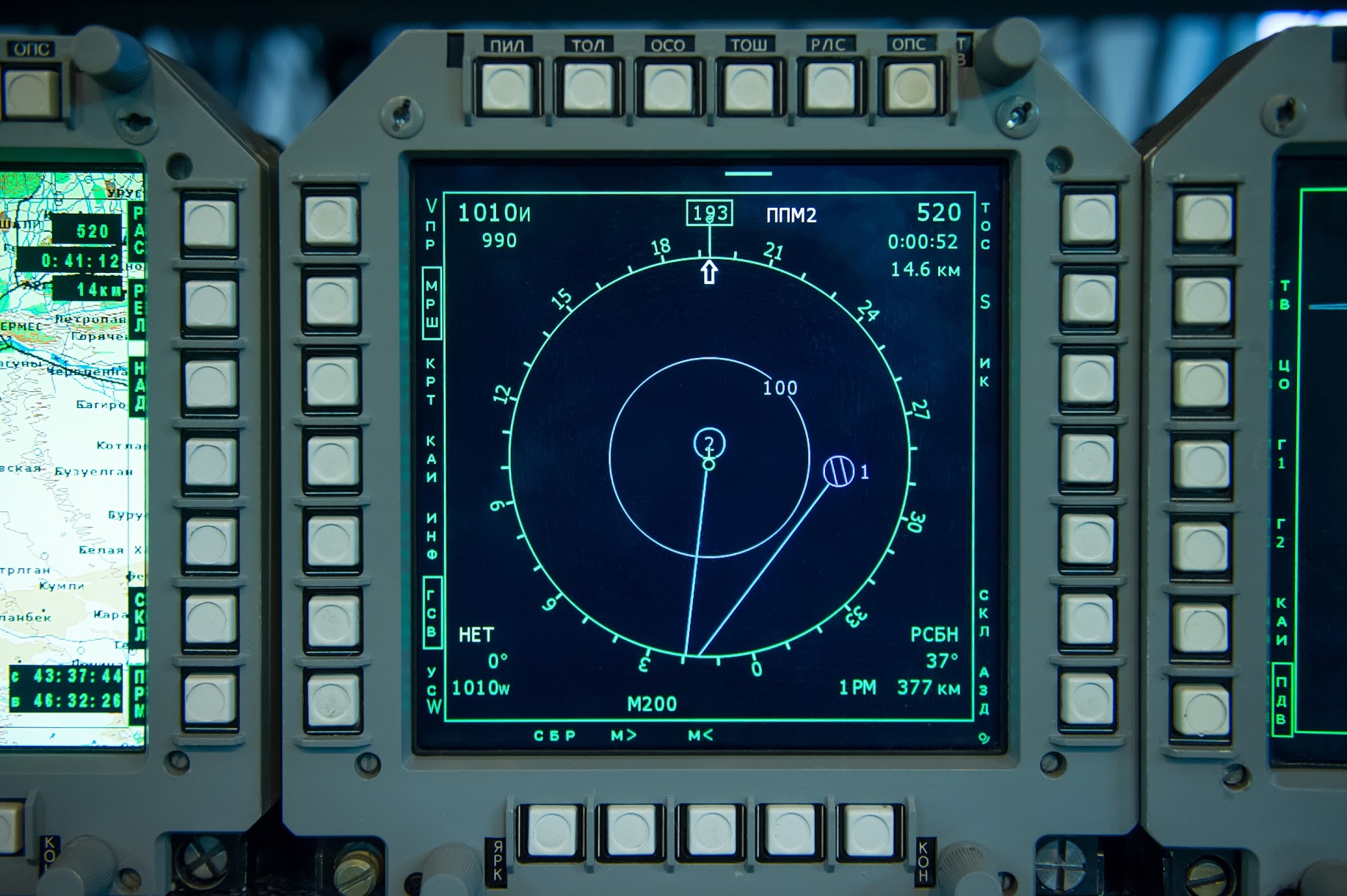
Бесплатформенная навигационная система БИНС-СП-1
Такой метод теоретически был разработан в 1930-е годы, но реализовать его удалось только спустя 20 лет. Инерциальная навигация основывается на применении законов механики, в частности на теории устойчивости механических систем, которую разрабатывали русские математики А.М. Ляпунов и А.В. Михайлов. Первые инерциальные навигационные системы (ИНС) были созданы в 1950-е годы в США и СССР. Они были довольно громоздкими и могли занимать все свободное пространство самолета. Современные ИНС изготавливаются с применением микроэлектронных технологий и занимают гораздо меньше места.
ИНС могут решать различные задачи. Это и общая географическая ориентировка, и определение местонахождения относительно заданной траектории или цели, и наведение на движущуюся цель.
Устройство инерциальной системы
Основа работы ИНС заключается в измерении ускорений летательного аппарата и его угловых скоростей относительно трех осей самолета для того, чтобы исходя из этих данных определить местоположение самолета, его скорость, курс и другие параметры. По результатам анализа объект стабилизируется, и может использоваться автоматическое управление.
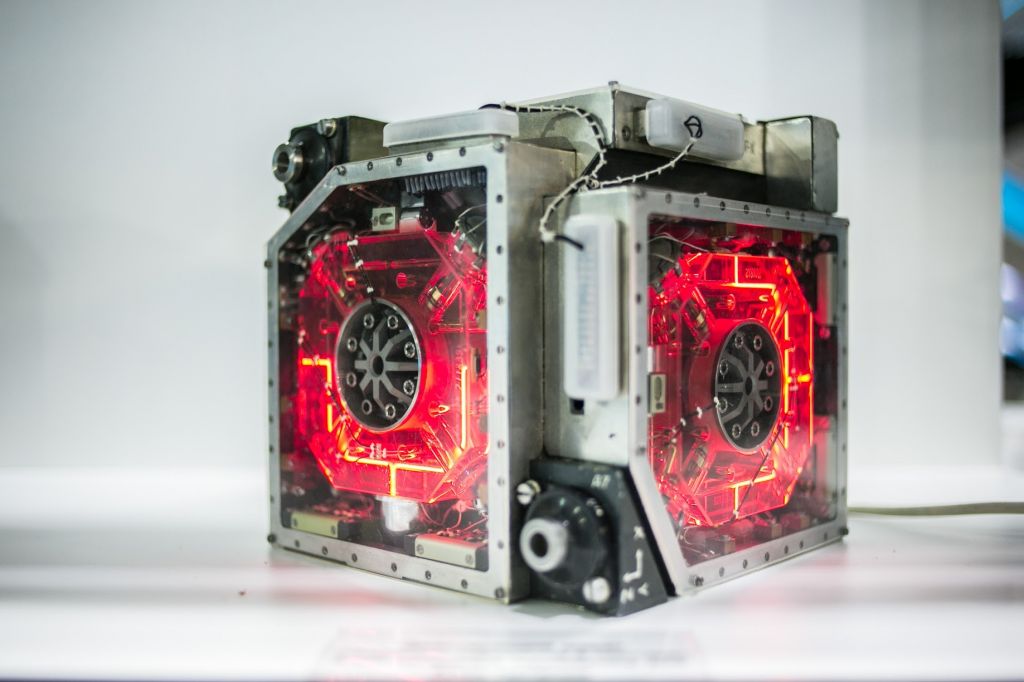
Лазерный гироскоп
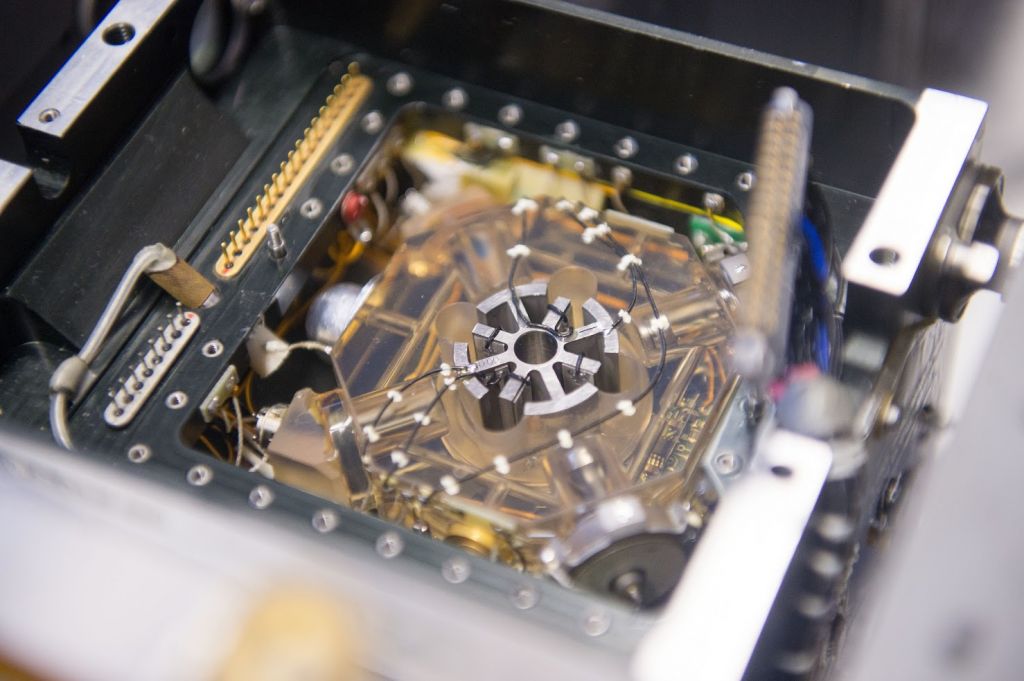
Для сбора информации о полете в состав ИНС включаются акселерометры, считывающие линейное ускорение, и гироскопы, позволяющие определить углы наклона самолета относительно основных осей: тангаж, рысканье и крен. Точность полученной информации зависит от характеристик этих приборов. Анализом данных занимается компьютер, который затем по определенным навигационным алгоритмам корректирует движение объекта.
ИНС делятся на платформенные и бесплатформенные. Основой для платформенных ИНС служит гиростабилизированная платформа. В бесплатформенных системах акселерометры и гироскопы жестко связаны с корпусом прибора. Функции платформы моделируются математически вычислительной системой. Бесплатформенные системы выгодно отличаются меньшим весом и габаритами, а также возможностью работать при значительных перегрузках.
Преимущества ИНС перед другими навигационными системами заключаются в их полной независимости от внешних источников данных, повышенной защите от помех, высокой информативности и возможности передавать информацию на большой скорости. Отсутствием какого-либо излучения при работе ИНС обеспечивается скрытность объекта, на котором она используется.
Недостатком ИНС можно назвать ошибки, которые накапливаются с течением времени в получаемой от приборов информации. Это могут быть как методические ошибки, так и ошибки, связанные с неверной начальной настройкой оборудования. Для их коррекции создаются интегрированные навигационные системы, где данные, получаемые ИНС, дополняются данными, поступающими от неавтономных систем, например спутниковой навигации. Еще одним относительным минусом ИНС является высокая стоимость входящего в их состав оборудования.
Авионика из Раменского
Инерциальные навигационные системы сегодня применяются не только в авиации. Их появление повлияло на развитие космонавтики, увеличилась дальность походов подводных лодок. ИНС используются в управлении морскими судами и баллистическими ракетами, применяются в геодезии. Также актуально применение подобных систем в беспилотных летательных аппаратах.

В 1960-е годы первые в СССР инерциальные навигационные системы для авиации были разработаны Раменским приборостроительным конструкторским бюро (РПКБ). Начиная с 1958 года специалистами РПКБ проводилось эскизное проектирование ИНС для различных классов и типов летательных аппаратов. Совершенствование чувствительных элементов – разработка поплавковых гироскопов и акселерометров, а затем динамически настраиваемых гироскопов – и применение цифровой вычислительной техники обеспечили создание и широкое применение ИНС.
К началу 1970-х годов предприятием были решены проблемы точного управляемого полета на большие расстояния. В дальнейшие годы инерциальные системы многократно совершенствовались. Раменское предприятие создавало навигационные комплексы и другое оборудование для самолетов ОКБ Сухого, Микояна, Туполева, Ильюшина, Камова, Миля и др. В 2012 году предприятие вошло в состав концерна «Радиоэлектронные технологии». Сегодня РПКБ – один из мировых лидеров в производстве авиационной электроники.
События, связанные с этим
Радиозонд – разведчик погоды
INS Inertial Navigation System Инерциальная навигационная система
Инерциальная навигационная система (ИНС) — это навигационное устройство, которое использует компьютер, датчики движения (акселерометры) и датчики вращения (гироскопы) для непрерывного вычисления путем счисления координат положения, ориентации и скорости (направления и скорости движения) движущегося объекта без необходимости внешних данных. Часто инерциальные датчики дополняются барометрическим высотомером, а иногда и магнитными датчиками (магнитометрами) и/или устройствами измерения скорости. ИНС используются на мобильных роботах и на транспортных средствах, таких как корабли, самолеты, подводные лодки, управляемые ракеты и космические аппараты.
Описание
Инерциальная навигация — это автономный навигационный метод, в котором измерения, выполняемые акселерометрами и гироскопами, используются для отслеживания положения и ориентации объекта относительно известной начальной точки, ориентации и скорости. Инерциальные измерительные блоки (IMU) обычно содержат три ортогональных скоростных гироскопа и три ортогональных акселерометра, измеряющих угловую скорость и линейное ускорение соответственно. Обрабатывая сигналы от этих устройств, можно отслеживать положение и ориентацию устройства.
Инерциальная навигация применяется во многих сферах, включая навигацию самолетов, тактических и стратегических ракет, космических аппаратов, подводных лодок и кораблей, встроен в мобильный телефон с целью определения местоположения мобильного телефона и отслеживания. Последние достижения в области создания микроэлектромеханических систем (MEMS) позволили создать маленькие и легкие инерциальные навигационные системы. Эти достижения расширили диапазон возможных применений, включив в него такие области, как захват движений человека и животных.
Инерциальная навигационная система включает в себя: компьютер и платформу или модуль, содержащий акселерометры, гироскопы или другие датчики движения. ИНС изначально получает положение и скорость от другого источника (человека-оператора, спутникового приемника GPS и т. д.) вместе с начальной ориентацией и после этого вычисляет свое собственное положение и скорость, интегрируя информацию, полученную от датчиков движения. Преимущество INS заключается в том, что он не требует внешних воздействий для определения своего положения, ориентации или скорости после инициализации.
ИНС может обнаружить изменение своего географического положения (например, перемещение на восток или север), изменение своей скорости (скорости и направления движения) и изменение своей ориентации (вращение вокруг оси). Он делает это путем измерения линейного ускорения и угловой скорости, приложенных к системе. Поскольку он не требует внешнего воздействия (после инициализации), он невосприимчив к помехам и ошибкам.
Инерциальные навигационные системы используются на многих движущихся объектах. Однако их стоимость и сложность накладывают ограничения на условия, в которых они практически применимы.
Гироскопы измеряют угловую скорость рамки датчика относительно инерциальной системы отсчета. Используя исходную ориентацию системы в инерциальной системе отсчета в качестве начального условия и интегрируя угловую скорость, текущая ориентация системы всегда известна. Это похоже на способность пассажира с завязанными глазами чувствовать, как автомобиль поворачивается влево и вправо или наклоняется вверх и вниз, когда автомобиль поднимается или спускается с холмов. Основываясь только на этой информации, пассажир знает, в каком направлении движется автомобиль, но не знает, насколько быстро или медленно он движется.
Акселерометры измеряют линейное ускорение движущегося транспортного средства в датчике или рамке кузова, но в направлениях, которые могут быть измерены только относительно движущейся системы (поскольку акселерометры закреплены в системе и вращаются вместе с системой, но не определяют своей собственной ориентации).Это похоже на способность пассажира с завязанными глазами в автомобиле чувствовать себя прижатым к сиденью, когда автомобиль ускоряется вперед или когда он замедляется. Основываясь только на этой информации, он знает, как автомобиль ускоряется относительно самого себя, то есть ускоряется ли он вперед, назад, влево, вправо, вверх (к потолку автомобиля) или вниз (к полу автомобиля), измеренное относительно автомобиля, но не направление относительно Земли, так как он не знает, в каком направлении автомобиль направлялся относительно Земли, когда он почувствовали ускорение.
Однако, отслеживая как текущую угловую скорость системы, так и текущее линейное ускорение системы, измеренное относительно движущейся системы, можно определить линейное ускорение системы в инерциальной системе отсчета. Выполнение интегрирования по инерционным ускорениям (используя исходную скорость в качестве начальных условий) с использованием правильных кинематических уравнений дает инерционные скорости системы, а интегрирование снова (используя исходное положение в качестве начального условия) дает инерционное положение. В нашем примере, если пассажир с завязанными глазами знал, как автомобиль был направлен и какова его скорость до того, как он был с завязанными глазами, и если он в состоянии отслеживать, когда автомобиль повернул и как он ускорялся и замедлялся с тех пор, то он может точно определить текущее положение и скорость автомобиля в любое время.
История
Инерциальные навигационные системы первоначально разрабатывались для ракет. Американский пионер ракетостроения Роберт Годдард экспериментировал с элементарными гироскопическими системами. Эти системы получили более широкое применение с появлением космических кораблей, управляемых ракет и коммерческих авиалайнеров.
Ранние немецкие системы наведения Второй мировой войны V2 объединяли два гироскопа и боковой акселерометр с простым аналоговым компьютером для регулировки азимута для ракеты в полете. Аналоговые компьютерные сигналы использовались для приведения в действие четырех графитовых рулей в выхлопе ракеты для управления полетом. Система Gn&C (наведение, навигация, и управление) для V2 обеспечила много нововведений как интегрированная платформа с наведением короткозамкнутого витка.
В начале 1950-х годов американское правительство хотело ограничить зависимость от немецкой команды в области военного применения, включая разработку полностью отечественной программы наведения ракет. Массачусетский технологический институт выбрали для обеспечения автономного резервного копирования системы наведения Convair в Сан-Диего и создания новой межконтинентальной баллистической ракеты «Атлас». Система наведения «Атлас» должна была представлять собой комбинацию бортовой автономной системы и наземной системы слежения и управления. Автономная система в конечном счете возобладала в применении баллистических ракет по очевидным причинам.
Первая «Дельта» — система наведения оценивала разницу в положении от исходной траектории. Вычисление скорости, которую необходимо получить (VGO), производится для коррекции текущей траектории с целью приведения VGO к нулю. Математика этого подхода была фундаментально обоснована, но отвергнута из-за проблем с точным инерциальным наведением и аналоговой вычислительной мощностью. Проблемы, с которыми столкнулись «Дельта», преодолела система Q. Революция системы Q заключалась в том, чтобы связать задачи наведения ракеты (и связанные с ними уравнения движения) в матрице Q. Матрица Q представляет собой частные производные скорости относительно вектора положения. Ключевая особенность этого подхода позволила использовать компоненты векторного кросс-продукта (v, xdv, /dt) в качестве основных сигналов скорости автопилота — метод, который стал известен как кросс-продукт рулевого управления. Q-система была представлена на первом техническом симпозиуме по баллистическим ракетам, состоявшемся в корпорации Рамо-Вулдридж в Лос-Анджелесе 21 и 22 июня 1956 года. Система Q была секретной информацией вплоть до 1960-х гг. производные этого наведения используются для современных ракет.
Подробный принцип работы
ИНС содержат инерциальные измерительные блоки (IMU), которые имеют угловые и линейные акселерометры (для изменения положения); некоторые IMU включают гироскопический элемент (для поддержания абсолютного углового ориентира).
Угловые акселерометры измеряют, как корабль вращается в пространстве. Как правило, имеется по крайней мере один датчик для каждой из трех осей: тангажа (нос вверх и вниз), рыскания (нос влево и вправо) и крена (по часовой стрелке или против часовой стрелки из кабины).
Линейные акселерометры измеряют негравитационные ускорения транспортного средства. Поскольку он может перемещаться по трем осям (вверх и вниз, влево и вправо, вперед и назад), для каждой оси имеется линейный акселерометр.
Компьютер постоянно вычисляет текущее положение автомобиля. Во-первых, для каждой из шести степеней свободы (x,y,z и θx ,yy и zz) он интегрирует с течением времени ощущаемое ускорение вместе с оценкой силы тяжести для вычисления текущей скорости. Затем он интегрирует скорость для вычисления текущего положения.
Инерциальное наведение затруднительно без компьютеров. Желание использовать инерциальное наведение в ракете Minuteman и проекте Apollo привело к ранним попыткам уменьшения размера компьютеров.
В настоящее время инерциальные системы наведения обычно объединяются со спутниковыми навигационными системами посредством цифровой системы фильтрации. Инерциальная система обеспечивает получение краткосрочных данных, а спутниковая система исправляет накопленные ошибки инерциальной системы.
Инерциальная система наведения, которая будет работать вблизи поверхности земли, должна включать тюнинг Шулера таким образом, чтобы ее платформа продолжала указывать в сторону центра Земли, когда транспортное средство перемещается с места на место.
Система инерциальной навигации
Инерциальная навигационная система (ИНС), функциональный элемент системы управления баллистической ракеты (СУ БР), предназначенный для получения навигационной информации о ее движении (координатах, скорости, угловом положении, угловой скорости), необходимой для функционирования системы наведения ракеты и системы стабилизации движения ракеты. Существующие ИНС БР подразделяются на два класса: автономные ИНС, в которых навигационная информация получается только от бортовых инерциальных измерителей без использования внешних источников информации, и корректируемые ИНС.
Автономная ИНС включает в свой состав датчики первичной информации, объединенные в инерциально-измерительный блок и аналого-цифровые средства преобразования первичной информации к виду, удобному для решения задач управления полетом. В зависимости от конструктивного исполнения инерциально-измерительного блока автономные ИНС подразделяются на платформенные ИНС и бесплатформенные ИНС. Основу инерциально-измерительного блока платформенных ИНС образует трехосная гиростабилизированная платформа (ГСП), на которой устанавливаются три акселерометра с некомпланарными осями чувствительности, что дает возможность измерять полный вектор кажущегося ускорения или кажущейся скорости ракеты. В узлах подвеса ГСП размещаются датчики угловой ориентации ракеты по каналам тангажа, рыскания и крена. Широкое применение платформенных ИНС в СУ БР обусловлено высокой точностью навигационных измерений и относительной простотой высокоточной предстартовой выставки измерителей ИНС в заданное пространственное положение путем горизонтирования ГСП перпендикулярно направлению отвеса в точке пуска БР и разворота ее в заданное азимутальное направление пуска по командам от системы прицеливания ракеты.
Бесплатформенные ИНС (БИНС) применяются в настоящее время главным образом в системах управления управляемых боевых блоков (ББ) БР. В бесплатформенных ИНС ГСП отсутствует, а инерциально-измерительный блок укреплен неподвижно в корпусе ББ. Достоинством БИНС по сравнению с платформенными ИНС являются меньший вес и габариты, работоспособность при высоком уровне перегрузок (до 150 ед.), характерных для управляемых ББ. Однако применение БИНС существенно усложняет решение задачи высокоточной выставки инерциально-измерительного блока в заданное положение перед пуском.
Широкое применение автономных ИНС в СУ баллистических ракет обусловлено рядом присущих им достоинств технического и оперативно-тактического характера, к числу которых относятся: независимость работы от окружающей среды и внешних источников информации; скрытность работы ввиду отсутствия каких-либо излучений; высокая помехозащищенность от средств воздействия противника; высокая точность навигационных определений на интервалах времени полета БР; высокая надежность, значительный ресурс непрерывной работы в режиме боевого дежурства.
Характерной особенностью ИНС является то, что в соответствии с фундаментальными законами физики измерениям с помощью датчиков ИНС поддается только кажущееся ускорение, представляющее собой часть полного ускорения ракеты без учета ускорения силы гравитационного притяжения. Кроме того, могут быть измерены интегралы от кажущегося ускорения: кажущаяся скорость и кажущееся перемещение (кажущийся путь). Данные параметры движения называют кажущимися параметрами или псевдопараметрами. На ракетах первых поколений, где ввиду отсутствия БЦВМ расчет действительных параметров движения был невозможен, управление полетом осуществлялось в кажущихся параметрах. Это приводило к соответствующим погрешностям управления. В СУ современных ракет управление полетом осуществляется в действительных параметрах движения (действительной скорости, действительных координатах), определяемых интегрированием в БЦВМ уравнений инерциальной навигации, в которых используются измеренные значения кажущихся параметров движения, а ускорение силы притяжения учитывается расчетным путем по достаточно точной модели гравитационного поля Земли, хранимой в памяти бортовой СУ.
Корректируемые ИНС образуют широкий класс систем навигации, в которых инерциальная навигационная информация корректируется с помощью внешних источников информации, в качестве которых могут использоваться спутниковые навигационные системы, системы навигации по геофизическим полям, системы навигации по картам местности и др. В СУ БР морского базирования широкое применение получили астроинерциальные системы, в которых инерциальная навигационная информация корректируется с помощью оптико-электронных систем визирования опорных навигационных звезд.
В автономном полете: как устроена инерциальная навигационная система
Когда-то путешественникам хватало простейших приборов для определения местоположения, но со временем расстояния и скорости перемещения выросли, и к навигационному оборудованию стали предъявляться повышенные требования. Радиолокацию сменила спутниковая навигация, но и у нее остаются свои слабые стороны – зависимость от спутников, уязвимость для помех и подавления. Поэтому разработанные во второй половине XX века автономные инерциальные системы навигации до сих пор сохраняют актуальность и продолжают развиваться.
Крупнейшим производителем инерциального навигационного оборудования в нашей стране является «Концерн Радиоэлектронные технологии» Госкорпорации Ростех. Его предприятия разрабатывают и выпускают инерциальные навигационные системы более 60 лет. Недавно Раменский приборостроительный завод выпустил тысячный блок уникальной инерциальной навигационной системы ИНС-2000.
Рассказываем, как устроена и работает инерциальная навигационная система, что ей помогает не зависеть от земных ориентиров и капризов природы.
Без внешних ориентиров
Инерциальные навигационные системы (ИНС) – единственное на сегодняшний день средство для автономного, то есть не зависящего от внешних источников информации, определения положения и ориентации объекта в пространстве. Подобные системы используются в авиации, космонавтике, на кораблях и подводных лодках, в беспилотных и роботизированных устройствах. С помощью ИНС движущиеся объекты могут без спутниковой связи с высокой точностью определять местоположение, свою ориентацию и скорость. Кроме того, в отличие от распространенной навигации по GPS инерциальные системы более устойчивы к помехам и перехвату.
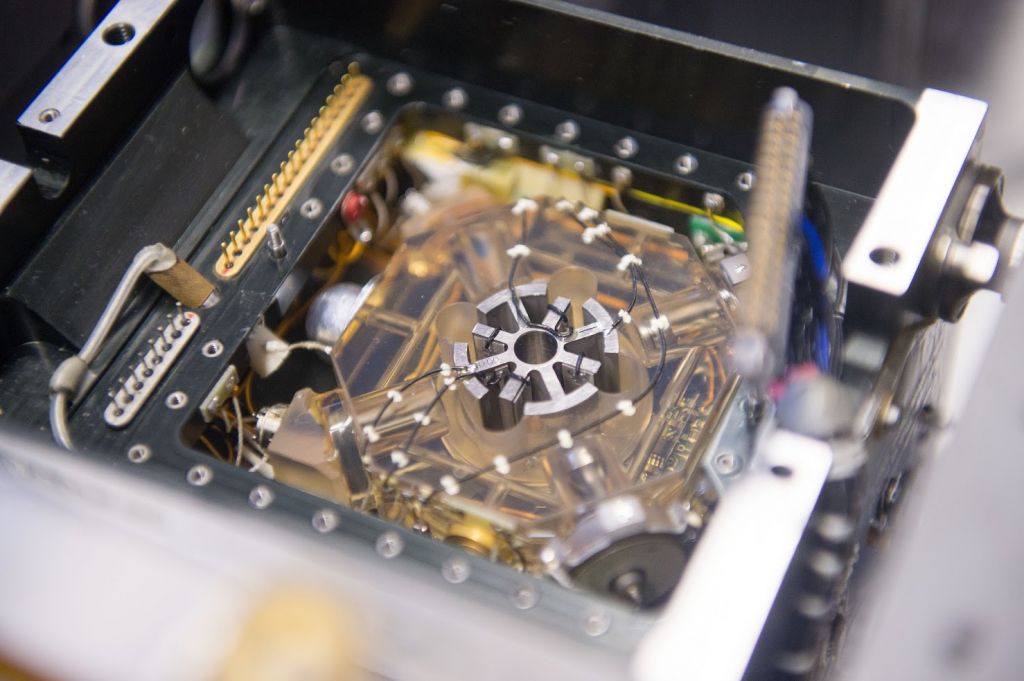
Устройство ИНС можно разделить на два ключевых элемента: измерительное оборудование, собирающее данные, и навигационный компьютер, обрабатывающий информацию. За измерения в составе ИНС отвечают гироскопы и акселерометры. Гироскопы – они могут быть механическими или лазерными – определяют углы наклона объекта относительно трех основных осей: тангаж, рысканье и крен. Акселерометры считывают линейное ускорение. ИНС может быть дополнена и другими датчиками, например магнитометром, измеряющим магнитное поле, или барометрическим высотомером.
ИНС бывают платформенными и бесплатформенными. В первом случае измерительная аппаратура устанавливается на гиростабилизированную платформу, которая вращается независимо от ИНС. Во втором случае акселерометры и гироскопы жестко связаны с корпусом прибора, а функции платформы моделируются математически вычислительной системой. Преимуществом платформенных систем является их более высокая точность, бесплатформенные же варианты более компактны, потребляют меньше энергии и обладают неограниченными углами измерения.
Как работает инерциальная система
В упрощенном виде работу ИНС можно представить по следующей схеме. В блок ввода начальной информации загружаются исходные данные для калибровки навигационной системы и ориентации инерционных датчиков. Затем эти данные попадают в блок измерений, вычислительный блок и блок времени, который синхронизируется с мировым временем. В ходе движения блок измерений регистрирует изменения параметров, на основе которых вычислительный блок определяет скорость и координаты объекта, после чего они передаются в систему управления.
Важнейшим параметром в работе ИНС является система отсчета. Она обеспечивает исходную ориентацию для начала навигации. Грубо говоря, система отсчета каждый раз подсказывает прибору, где право, где лево, где верх, а где низ, а также точку старта движения. В качестве системы отсчета могут выступать астрономические объекты, Земля или горизонт, также она может быть произвольной.
Несмотря на довольно высокую точность, инерциальные навигационные системы имеют и свои недостатки. Слабым местом ИНС являются ошибки в измерениях, которые накапливаются с течением времени в получаемой от приборов информации – так называемый дрейф. Так как навигационный компьютер суммирует каждое измерение, чтобы выяснить, как изменилось положение по сравнению с предыдущей оценкой, небольшая погрешность со временем растет, и общая оценка становится все более неточной. Для коррекции подобных ошибок инерциальные системы обычно дополняются GPS-датчиками.
Навигация из Раменского
В нашей стране первые устройства, основанные на инерциальной навигации, появились в 1960-е годы. Пионером в этом направлении выступило Раменское приборостроительное конструкторское бюро (РПКБ), в котором уже с 1958 года разрабатывались первые проекты ИНС для летательных аппаратов. В последующие годы инерциальные системы многократно совершенствовались. Раменское предприятие создавало навигационные комплексы и другое оборудование для самолетов ОКБ Сухого, Микояна, Туполева, Ильюшина, Камова, Миля и др.
Раменский приборостроительный завод (РПЗ), при котором когда-то было создано конструкторское бюро, также многие годы выпускает инерциальные навигационные системы. Оба предприятия входят в структуру «Концерна Радиоэлектронные технологии» Госкорпорации Ростех. Одной из основных серийных инерциальных навигационных систем, выпускаемых РПЗ, сегодня является система ИНС-2000 и ее модификации.

ИНС-2000 относится к платформенным системам с применением механических гироскопов. Она выполнена в виде моноблока, состоящего из гиростабилизированной платформы на базе динамически настраиваемых гироскопов, сервисной электроники, вычислителя и блока интерфейса. При необходимости система может комплектоваться магнитометром и интегрироваться со спутниковой навигацией.
ИНС-2000 отличается высокой точностью работы. При автономном использовании погрешность системы составляет не более 3,7 км за час полета, а при работе со встроенным блоком спутниковой коррекции не превышает 40 м за час.
Раменским приборостроительным заводом создано пять модификаций системы, которые позволяют использовать разработку практически для любых летательных аппаратов. Изделия отличаются функционально-программным обеспечением — каждое из них адаптировано под конкретные комплексы бортового оборудования, учитывает характеристики определенного типа самолетов и вертолетов.
Сегодня ИНС-2000 используется в качестве бортового датчика навигационной информации в большинстве отечественных вертолетов и самолетов. В 2016 году на раменском предприятии была проведена модернизация изделия по замене импортной элементной базы на отечественную в рамках импортозамещения. В феврале 2022 года Раменский приборостроительный завод выпустил тысячный блок инерциальной навигационной системы ИНС-2000.
События, связанные с этим
«Дом будущего» от Ростеха
Космические тренажеры: репетиция полета на Земле