Раскладываем по полочкам параметры АЦП
Привет, Хабр! Многие разработчики систем довольно часто сталкиваются с обработкой аналоговых сигналов. Не все манипуляции с сигналами можно осуществить в аналоговой форме, поэтому требуется переводить аналог в цифровой мир для дальнейшей постобработки. Возникает вопрос: на какие параметры стоит обратить внимание при выборе микроконтроллера или дискретного АЦП? Что все эти параметры означают? В этой статье постараемся детально рассмотреть основные характеристики АЦП и разобраться на что стоит обратить внимание при выборе преобразователя.
Введение
Начать бы хотелось с интересного философского вопроса: если аналоговый сигнал — это бесконечность, теряем ли мы при оцифровке сигнала бесконечное количество информации? Если это так, тогда какой смысл существования такого неэффективного преобразования?
Для того, чтобы ответить на этот вопрос, разберемся с тем, что такое аналого-цифровое преобразование сигнала. Основной график, который отражает работу АЦП – передаточная характеристика преобразования. В идеальном мире это была бы прямая линия, то есть у каждого аналогового уровня сигнала имелся бы единственный цифровой эквивалент.
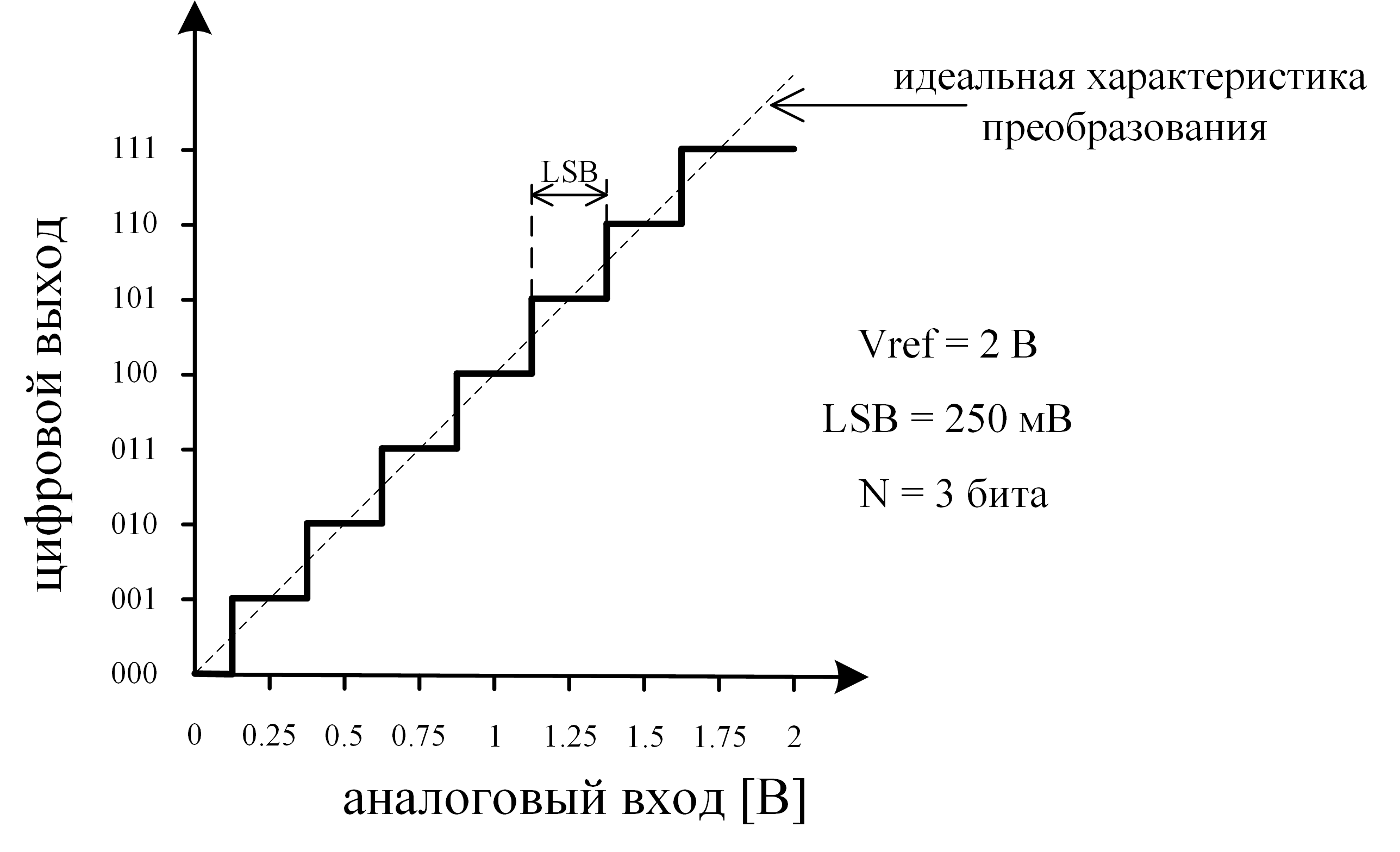
Рис. 1: Идеальная характеристика АЦП
- Статические — характеризуют АЦП при постоянном или очень медленно изменяющемся входном сигнале. К данным параметрам можно отнести: максимальное и минимальное допустимое значение входного сигнала, разрядность, интегральную и дифференциальную нелинейности, температурную нестабильность параметров преобразования и др.
- Динамические — определяют максимальную скорость преобразования, предельную частоту входного сигнала, шумы и нелинейности.
Статические параметры
- Максимальный (Vref) и минимальный (обычно 0) уровни входного сигнала — устанавливают диапазон шкалы преобразования, относительно которой будет оцениваться входной сигнал (рис. 1). Также этот параметр может обозначаться как FS — full scale. Для дифференциального АЦП шкала определяется от -Vref до +Vref, однако для упрощения далее будем рассматривать только single-ended шкалы.
- Разрядность (N) — разрядность выходного кода, характеризующая количество дискретных значений (), которые преобразователь может выдать на выходе (рис. 1).
- Ток потребления (Idd) — сильно зависит от частоты преобразования, поэтому информацию об этом параметре лучше искать на соответствующем графике.
- МЗР (LSB) – младший значащий разряд (Least Significant Bit) — минимальное входное напряжение, разрешаемое АЦП (по сути единичный шаг в шкале преобразования). Определяется формулой: (рис. 1).
- Ошибка смещения (offset error) – определяется как отклонение фактической передаточной характеристики АЦП от передаточной характеристики идеального АЦП в начальной точке шкалы. Измеряется в долях LSB. При ошибке смещения переход выходного кода от 0 в 1 происходит при входном напряжении отличном от 0.5LSB (рис. 2).
 Рис. 2: Ошибка смещения
Рис. 2: Ошибка смещения
Существует и другой вариант квантователя, когда переход осуществляется при целых значения LSB (характеристика у него будет смещена относительно первого варианта, который представлен на рисунке 2). Оба этих квантователя равноправны, и для простоты далее будем рассматривать только первый вариант. - Ошибка усиления (gain error) – определяется как отклонение средней точки последнего шага преобразования (которому соответствует входное напряжение Vref) реального АЦП от средней точки последнего шага преобразования идеального АЦП после компенсации ошибки смещения (рис. 3).
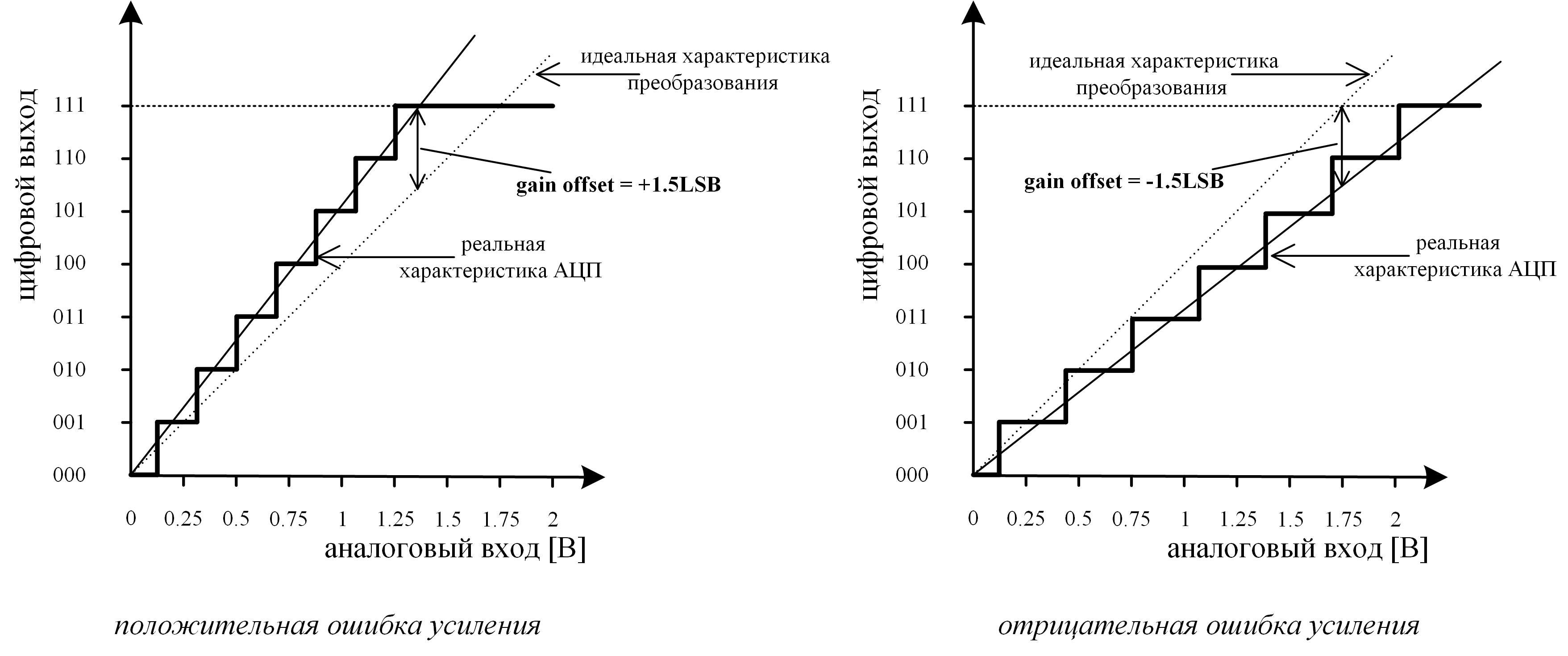 Рис. 3: Ошибка усиления
Рис. 3: Ошибка усиления - Дифференциальная нелинейность (DNL — Differential nonlinearity) – отклонение ширины ступеньки на передаточной характеристике реального АЦП от номинальной ширины ступеньки у идеального преобразователя. Из-за дифференциальной нелинейности шаги квантования имеют различную ширину (рис. 4).
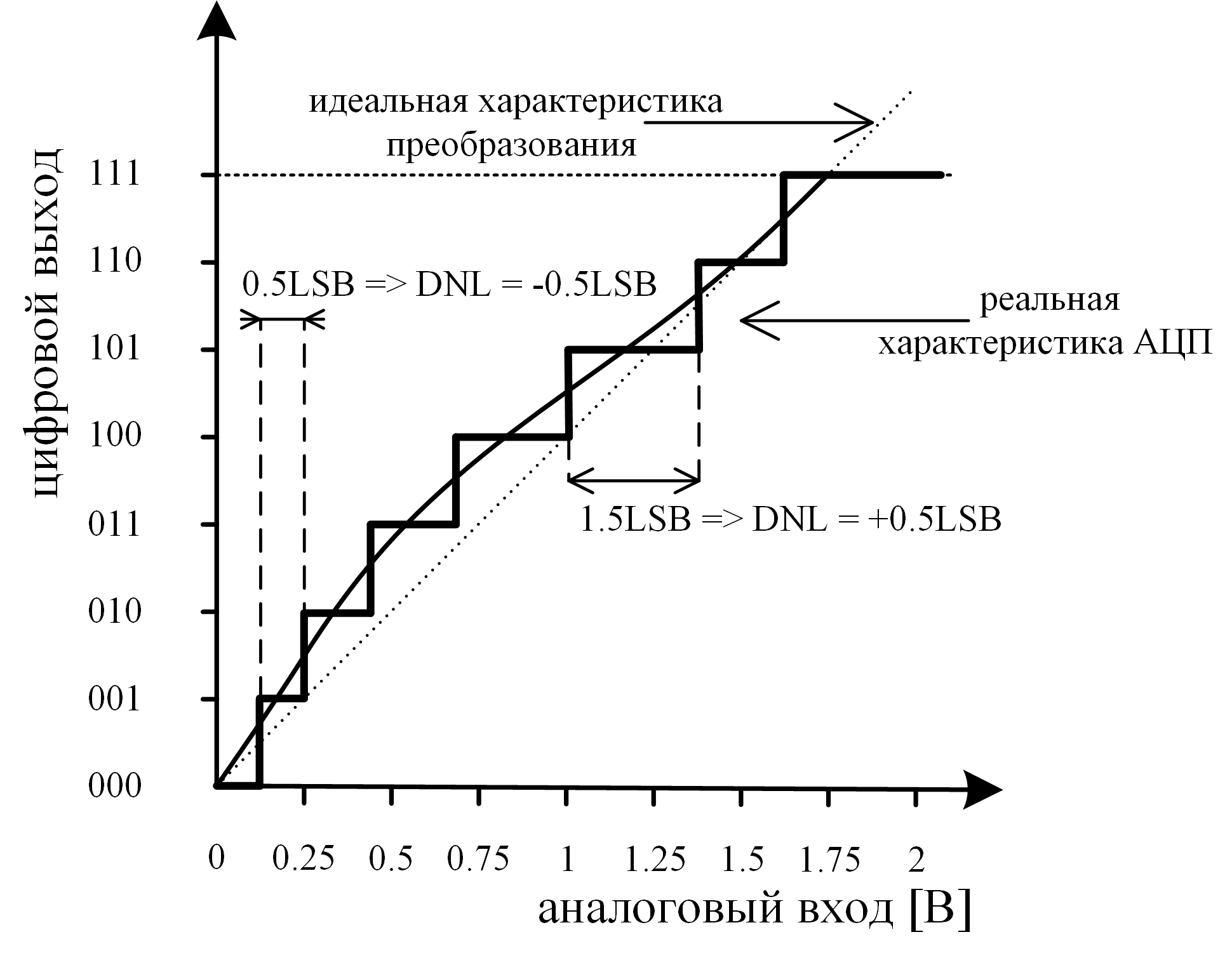
Рис. 4: Дифференциальная нелинейность

Рис. 5: Интегральная нелинейность
Динамические параметры
-
Частота дискретизации (fs — sampling frequency) — частота, при которой происходит преобразование в АЦП (ну или 1/Ts, где Ts — период выборки). Измеряется числом выборок в секунду. Обычно под данным обозначением подразумевают максимальную частоту дискретизации, при которой специфицированы параметры преобразователя (рис. 6).
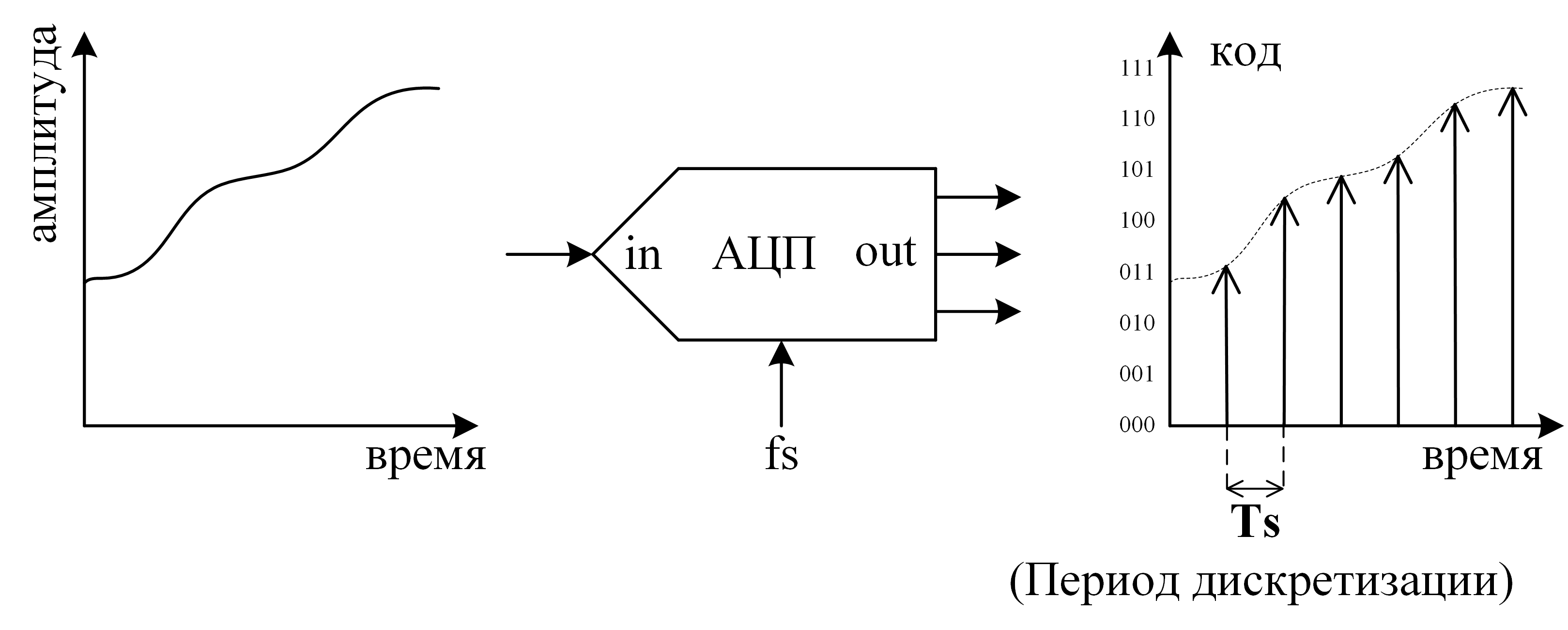

Рис. 7: Отношение сигнал/шум
Для оценки SNR АЦП при разработке системы можно воспользоваться следующей формулой:
Первые 2 слагаемых учитывают уровень сигнала и ошибку квантования (нужно понимать, что формула верна для сигнала размаха полной шкалы). Третье слагаемое учитывает эффект передискретизации (выигрыш по обработке или processing gain): если полоса обрабатываемого сигнала (BW < fs/2), то, применив цифровой фильтр низких частот (либо полосовой, тут зависит все от полосы и несущей) к результату преобразования, можно вырезать часть шума АЦП, а оставшаяся часть будет распределена от 0 до BW (рис. 8). Если шум АЦП равномерно распределен по всем частотам (т.н. «белый» шум) интегральный шум после фильтрации уменьшится в fs/2 / BW раз, что и отражает третий член формулы.
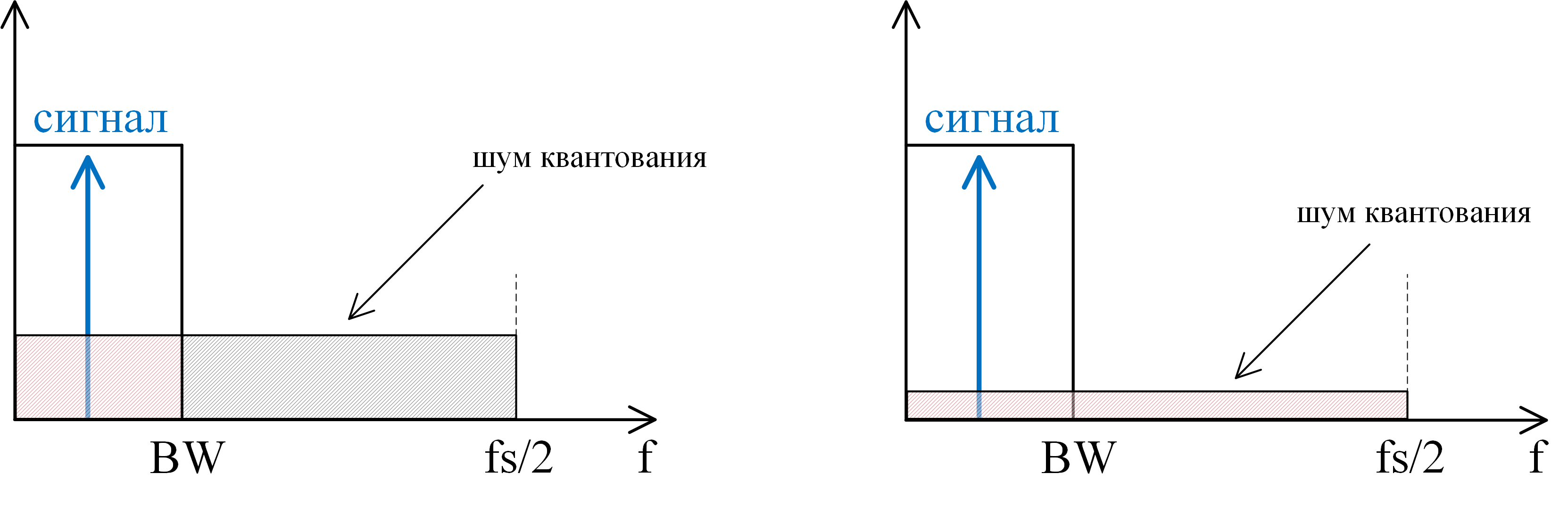
Рис. 8: Увеличение SNR за счет передискретизации
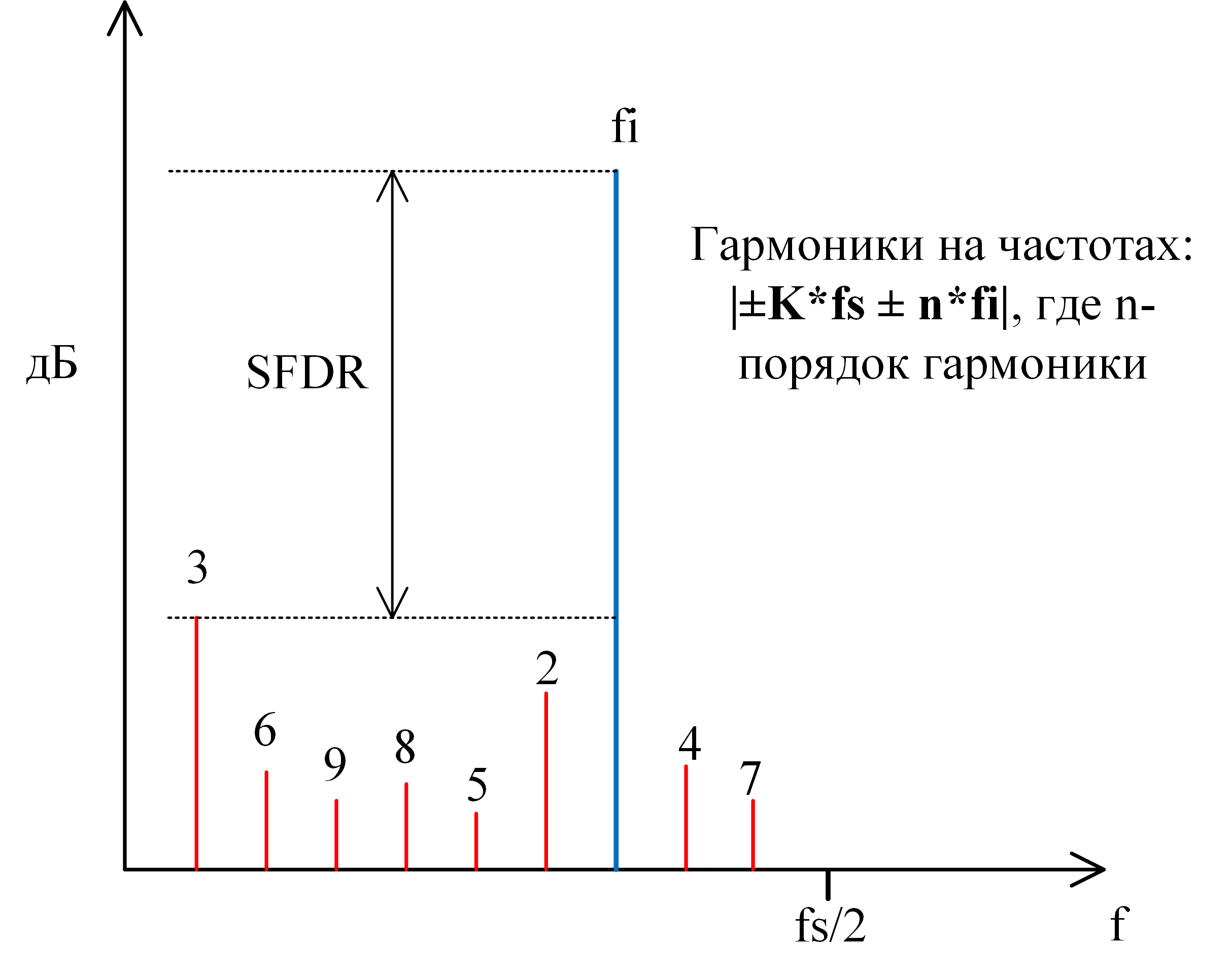
Рис. 9: Нелинейные искажения
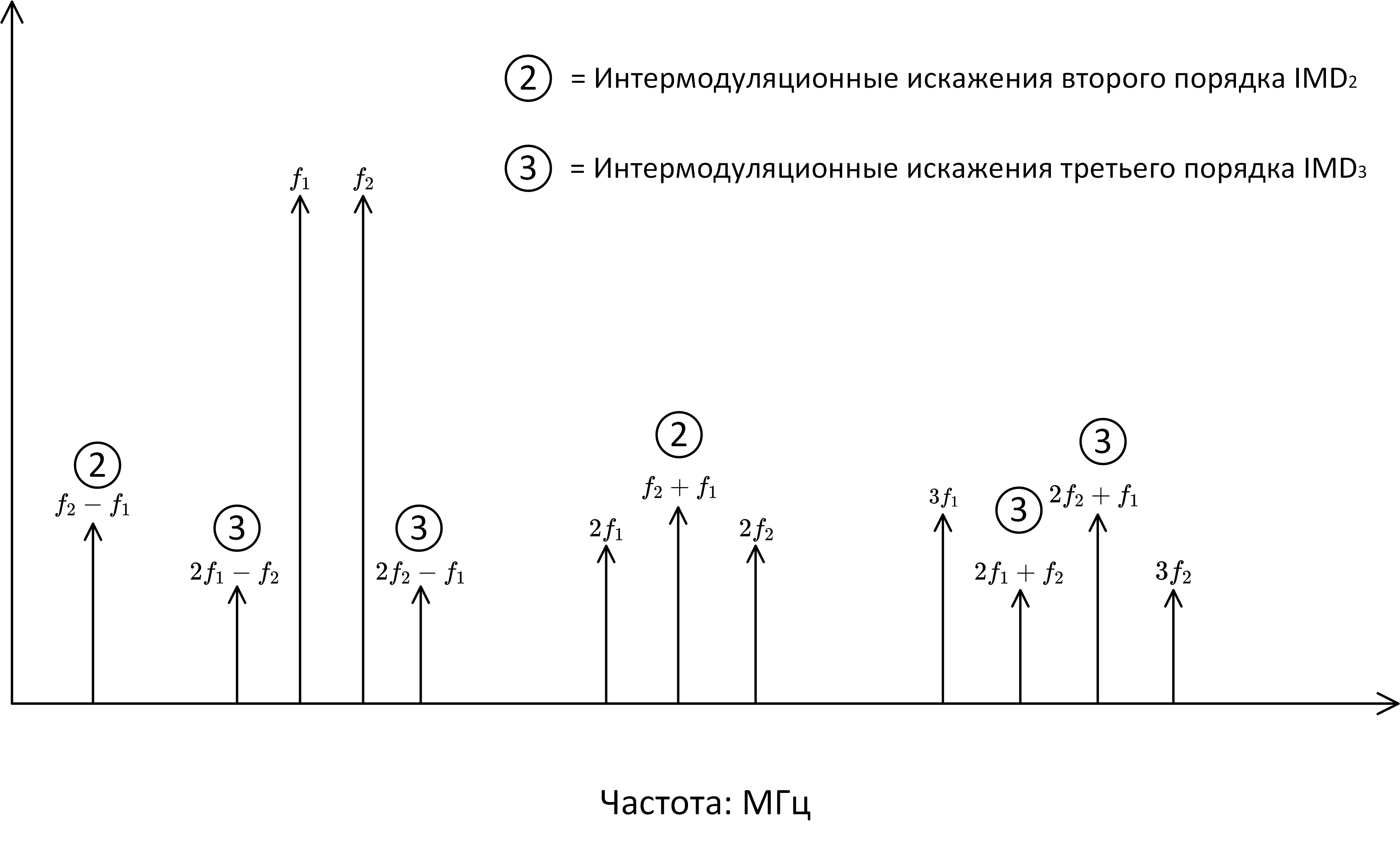
Рис. 10: интермодуляционные искажения
Полоса пропускания АЦП и субдискретизация (undersamling/sub-sampling)
Полоса пропускания преобразователя (FPBW — Full Power (Analog) Bandwidth). Обычно ширина полосы преобразователя составляет несколько зон Найквиста. Этот параметр должен быть в спецификации, но, если его нет, можно попробовать самостоятельно оценить минимально возможное значение полосы пропускания для данного АЦП. За период выборки емкость УВХ должна зарядиться с точностью 1 LSB. Если период выборки равен , то ошибка выборки сигнала полной шкалы равна:
Решив относительно t, получаем:
Положив, что , определим минимальную полосу АЦП (для ):
Например, для 16 битного АЦП с частотой дискретизации 80 Мвыб/c и шкалой 2 В ограничение снизу для полосы пропускания, рассчитанное по этой формуле, составит FPBW = 282 МГц.
Analog Bandwidth является очень важным параметром при построении систем, которые работают в режиме субдискретизации (“undersampling”). Объясним это подробнее.
Согласно критерию Найквиста, ширина спектра обрабатываемого сигнала должна быть как минимум в 2 раза меньше частоты дискретизации, чтобы избежать элайзинга. Здесь важно, что именно ширина полосы, а не просто максимальная частота сигнала. Например, сигнал, спектр которого расположен целиком в 6-й зоне Найквиста может быть теоретически дискретизован без потери информации (рис. 11). Ограничив спектр этого сигнала антиэлайзинговым фильтром, его можно подавать на дискретизатор с частотой fs. В результате сигнал отразится в каждой зоне.
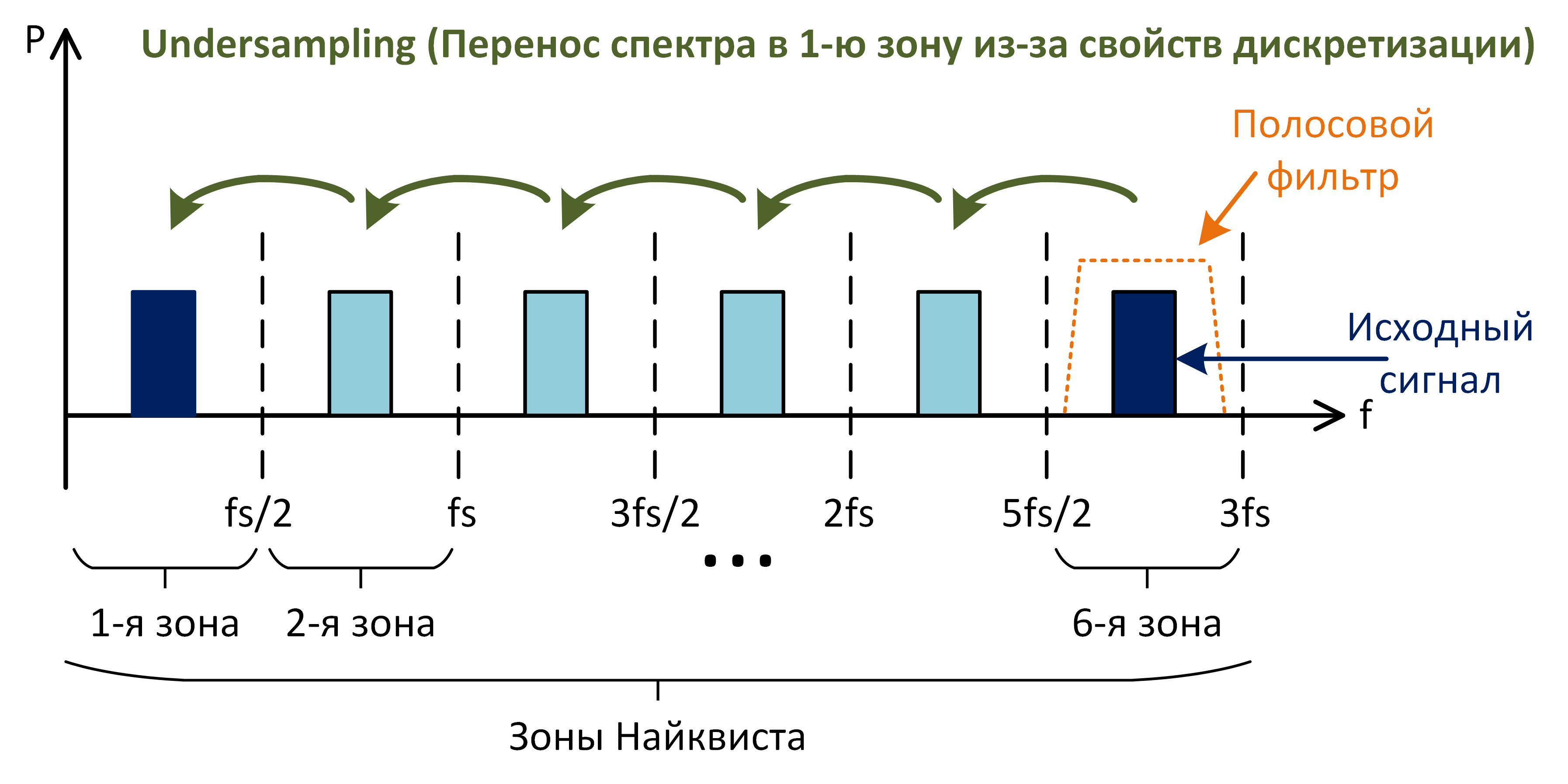
Рис. 11: undersampling
Свойство переноса спектра при дискретизации
Undersampling или sub-sampling имеет место быть из-за свойств дискретизации. Рассмотрим на примере, пусть имеется сигнал a(t) и его спектральная плотность (рис. 12). Необходимо найти спектральную плотность сигнала после дискретизации сигнала .
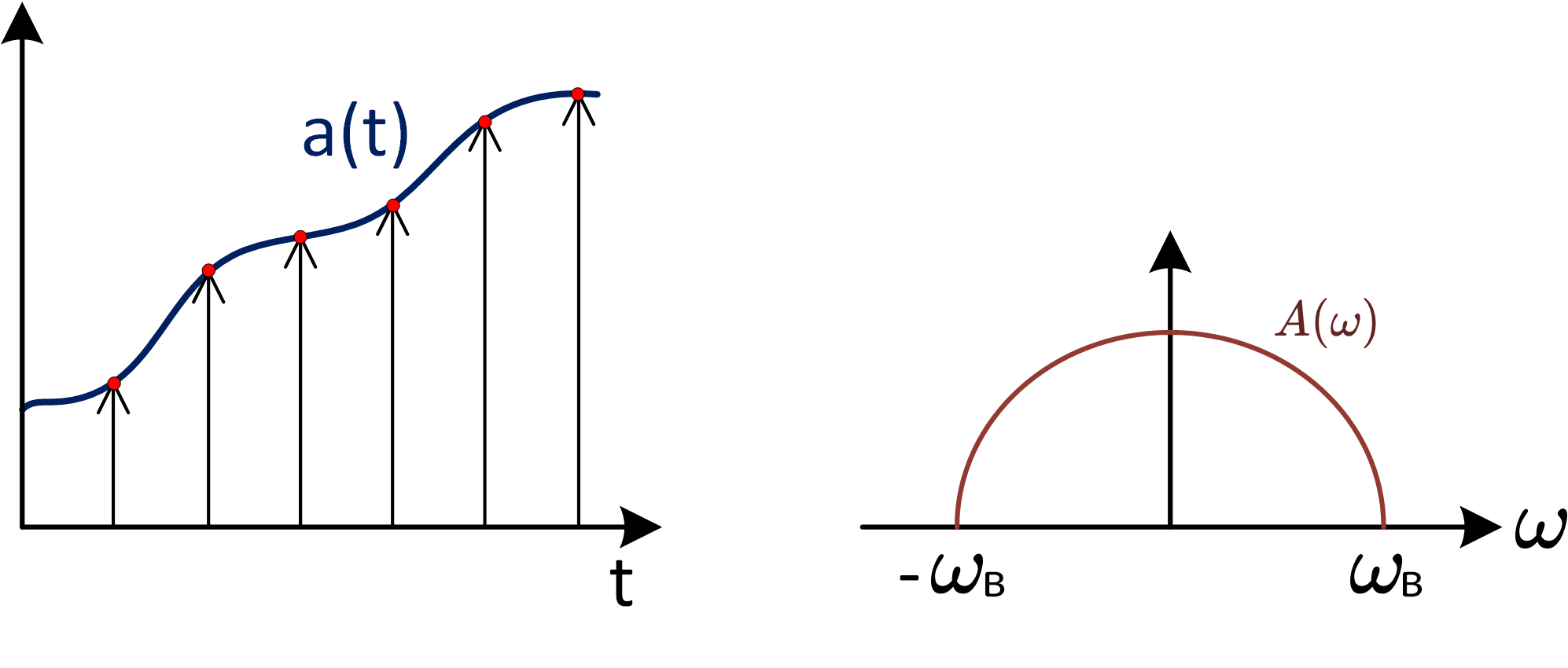
Рис 12: дискретизация непрерывного сигнала
По фильтрующему свойству дельта-функции:
С помощью формулы Релея вычислим спектр:
Из этого выражения следует что спектр сигнала будет повторяться во всех зонах Найквиста.
Итак, если есть хороший антиэлайзинговый фильтр, то соблюдая критерий Найквиста, можно оцифровывать сигнал с частотой дискретизации намного ниже полосы АЦП. Но использовать субдискретизацию нужно осторожно. Следует учитывать, что динамические параметры АЦП деградируют (иногда очень сильно) с ростом частоты входного сигнала, поэтому оцифровать сигнал из 6-й зоны так же «чисто», как из 1-й не получится.
Несмотря на это субдискритезация активно используется. Например, для обработки узкополосных сигналов, когда не хочется тратиться на дорогой широкополосный быстродействующий АЦП, который вдобавок имеет высокое потребление. Другой пример – выборка ПЧ (IF-sampling) в РЧ системах. Там благодаря undersampling можно исключить из радиоприемного тракта лишнее аналоговое звено — смеситель (который переносит сигнал на более низкую несущую или на 0).
Сравним архитектуры
На данный момент в мире существует множество различных архитектур АЦП. У каждой из них есть свои преимущества и недостатки. Не существует архитектуры, которая бы достигала максимальных значений всех, описанных выше параметров. Проанализируем какие максимальные параметры скорости и разрешения смогли достичь компании, выпускающие АЦП. Также оценим достоинства и недостатки каждой архитектуры (более подробно о различных архитектурах можно прочитать в статье на хабр).
Таблица сравнения архитектур
| Тип архитектуры | Преимущества | Недостатки | Максимальное разрешение | Максимальная частота дискретизации |
| flash | Быстрый преобразователь. Преобразование осуществляется в один такт. | Высокое энергопотребление. Ограниченное разрешение. Требует большой площади кристалла ( компараторов). Трудно согласовать большое количество элементов (как следствие низкий выход годных). | 14 бит 128 КВыб/с AD679 | 3 бит 26 ГВыб/с HMCAD5831 |
| folding-interpolated | Быстрый преобразователь. Преобразование осуществляется в один такт. Требует меньшее число компараторов благодаря предварительной «свёртке» всего диапазона обработки в некоторый более узкий диапазон. Занимает меньше площади. |
Ошибки, связанные с нелинейностью блока свёртки. Задержка на установление уровней в блоке свёртки, которая уменьшает максимальную fs. Среднее разрешение. |
12 бит 6.4 ГВыб/с ADC12DL3200 | 12 бит 6.4 ГВыб/с ADC12DL3200 |
| SAR | Высокая точность. Низкое энергопотребление. Легка в использовании. |
Ограниченная скорость. | 32 бит 1 МВыб/с LTC2500 | 10 бит 40 МВыб/с XRD64L43 |
| pipeline | Быстрый преобразователь. Самая высокая точность среди быстрых АЦП. Не занимает большую площадь. Имеет меньшее потребления, среди аналогичных быстрых преобразователей. |
Конвейерная задержка. | 24 бит 192 КВыб/с AK5386 | 12 бит 10.25 ГВыб/с AD9213 |
| dual-slope | Средняя точность преобразования. Простота конструкции. Низкое потребление. Устойчивость к изменениям факторов внешней среды. |
Обрабатывает низкочастотные Сигналы (низкая fs). Посредственное разрешение. |
12+знаковый бит 10 Выб/с TC7109 | 5+знак бит 200 КВыб/с HI3-7159 |
| ∑-Δ | Самая высокая точность пре- Образования благодаря эффекту «Noise shaping» (специфическая фильтрация шума квантования) и передискретизации. |
Не может работать с широкополосным сигналом. | 32 бита 769 КВыб/с AK5554 | 12 бит 200МВыб/с ADRV9009 |
Информацию для таблицы брал на сайте arrow, поэтому если что-то упустил поправляйте в комментариях.
Заключение
Описав параметры разрабатываемой вами системы, можно понять, какие характеристики АЦП для вас являются критичными. Однако не стоит забывать, что динамические параметры преобразователей сильно зависят от многих факторов (частота дискретизации, частота входного сигнала, амплитуда входного сигнала и тд.) Зачастую в таблицах параметров в документации указывают только «красивые» (с точки зрения маркетинга) цифры. Приведу пример, возьмем АЦП ad9265 и рассмотрим его параметр SFDR при частоте входного сигнала 70 МГц:
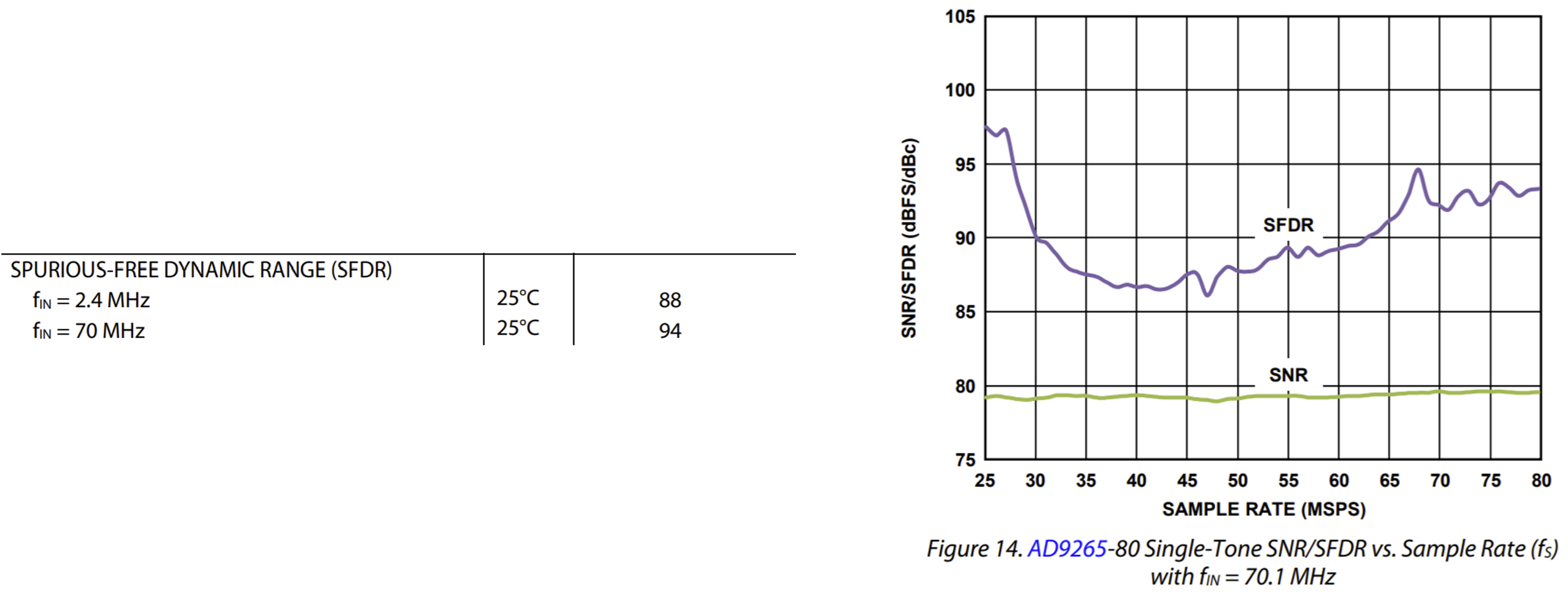
Таблица показывает значение SFDR при максимальных значениях частоты дискретизации, однако если вы будете использовать частоту ниже (к примеру 40 МГц), вы не получите этих «хороших» значений. Поэтому советую анализировать характеристики АЦП по графикам, чтобы примерно понимать, сможет ли данная микросхема обеспечить нужную вам точность преобразования.
- АЦП
- схемотехника для чайников
- электроника
- Блог компании Миландр
- Схемотехника
- Электроника для начинающих
- Инженерные системы
1.10.1. Идеальная передаточная характеристика ацп
Передаточная характеристика АЦП — это функция зависимости кода на выходе АЦП от напряжения на его входе. Такой график представляет собой кусочно-линейную функцию из 2 N «ступеней», где N — разрядность АЦП. Каждый горизонтальный отрезок этой функции соответствует одному из значений выходного кода АЦП (см. рисунок 13). Если соединить линиями начала этих горизонтальных отрезков (на границах перехода от одного значения кода к другому), то идеальная передаточная характеристика будет представлять собой прямую линию, проходящую через начало координат.

Рисунок 13 — Идеальная передаточная характеристика 3-х разрядного АЦП
Рисунок 13иллюстрирует идеальную передаточную характеристику для 3-х разрядного АЦП с контрольными точками на границах перехода кода. Выходной код принимает наименьшее значение (000b) при значении входного сигнала от 0 до 1/8 полной шкалы (максимального значения кода этого АЦП). Также следует отметить, что АЦП достигнет значения кода полной шкалы (111b) при 7/8 полной шкалы, а не при значении полной шкалы. Т. о. переход в максимальное значение на выходе происходит не при напряжении полной шкалы, а при значении, меньшем на наименьший значащий разряд (LSB), чем входное напряжение полной шкалы. Передаточная характеристика может быть реализована со смещением -1/2 LSB. Это достигается смещением передаточной характеристики влево, что смещает погрешность квантования из диапазона -1. 0 LSB в диапазон -1/2 . +1/2 LSB.

Рисунок 14 — Передаточная характеристика 3-разрядного АЦП со смещением на -½ LSB: 1— наибольшее значение кода при значении входного напряжения, меньшем на ½ LSB, чем входное напряжение к полной шкале; 2 — передаточная функция смещается влево на ½ LSB для уменьшения погрешности квантования на ½ LSB
Аддитивная погрешность
Из-за технологического разброса параметров при изготовлении интегральных микросхем реальные АЦП не имеют идеальной передаточной характеристики. Отклонения от идеальной передаточной характеристики определяют статическую погрешность АЦП и приводятся в технической документации. Идеальная передаточная характеристика АЦП пересекает начало координат, а первый переход кода происходит при достижении значения 1 LSB. Аддитивная погрешность (погрешность смещения) может быть определена как смещение всей передаточной характеристики влево или вправо относительно оси входного напряжения, как показано на рисунке 15. Таким образом, в составляющую аддитивной погрешности (смещение реальной передаточной характеристики АЦП относительно идеальной) включается и смещение <-1/2….1/2>< LSB. 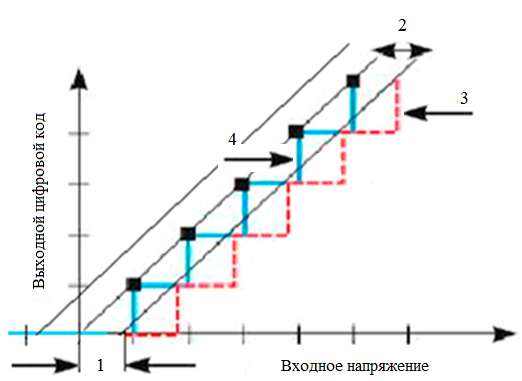 Рисунок15 — Аддитивная погрешность (Offset Error): 1— величина погрешности; 2 — аддитивная погрешность сдвигает передаточную характеристику влево или вправо; 3 — передаточная характеристика со смещением; 4 — передаточная характеристика без смещения.
Рисунок15 — Аддитивная погрешность (Offset Error): 1— величина погрешности; 2 — аддитивная погрешность сдвигает передаточную характеристику влево или вправо; 3 — передаточная характеристика со смещением; 4 — передаточная характеристика без смещения.  Рисунок16 — Мультипликативная погрешность (Full-Scale Error): 1 — изменение наклона передаточной харатеристики по сравнению с идеальной; 2 — мультипликативная погрешность; 3 — граница перехода к максимальному коду сдвигается влево или вправо; 4 — передаточная характеристика с мультипликативной погрешностью; 5 — передаточная характеристика без мультипликативной погрешности
Рисунок16 — Мультипликативная погрешность (Full-Scale Error): 1 — изменение наклона передаточной харатеристики по сравнению с идеальной; 2 — мультипликативная погрешность; 3 — граница перехода к максимальному коду сдвигается влево или вправо; 4 — передаточная характеристика с мультипликативной погрешностью; 5 — передаточная характеристика без мультипликативной погрешности
Расчет нелинейностей аналого-цифрового преобразователя
Антипов, М. Ю. Расчет нелинейностей аналого-цифрового преобразователя / М. Ю. Антипов. — Текст : непосредственный // Молодой ученый. — 2016. — № 13 (117). — С. 144-148. — URL: https://moluch.ru/archive/117/32061/ (дата обращения: 16.03.2024).
В настоящее время цифровая аппаратура постепенно вытесняет аналоговую. Такую тенденцию можно описать многими факторами, но главный из них — простота обработки цифровых сигналов по сравнению аналоговыми. Поэтому цифровая обработка сигналов применяется в таких различных областях, как биомедицина, акустика, звуковая локация, радиолокация, сейсмология, связь, системы передачи данных, ядерная техника, и многих других. Для того, чтобы цифровая ЭВМ могла работать с аналоговым сигналом, его нужно преобразовать в цифровой вид, то есть сделать конвертацию. Конвертацию осуществляет специальное устройство — аналого-цифровой преобразователь. Такое преобразование содержит в себе погрешности, и тем она меньше, чем больше общая точность АЦП. В некоторых областях эти погрешности должны быть максимально минимизированы, то есть возникает вопрос подбора подходящего устройства. Поэтому каждый АЦП обладает рядом характеристик, отражающих его общую точность.
Характеристики АЦП подразделяются на статические, которые задают конечную точность преобразования, и динамические, характеризующие быстродействие данного класса устройств.
Но перед тем, как рассматривать статические характеристики, следует ввести определение передаточной характеристики. Итак, передаточная характеристика АЦП — это функция зависимости выходного кода АЦП от поданного напряжения. У идеального АЦП (у которого нет аппаратных погрешностей) такая зависимость представляет собой кусочно-линейную функцию из  «ступеней», где
«ступеней», где  — разрядность АЦП. Каждый горизонтальный отрезок этой функции соответствует одному из значений выходного кода. Если соединить линиями начала этих горизонтальных отрезков, то идеальная передаточная характеристика будет представлять собой прямую линию, проходящую через начало координат.
— разрядность АЦП. Каждый горизонтальный отрезок этой функции соответствует одному из значений выходного кода. Если соединить линиями начала этих горизонтальных отрезков, то идеальная передаточная характеристика будет представлять собой прямую линию, проходящую через начало координат.
Рисунок 1 иллюстрирует идеальную передаточную характеристику для 3-х разрядного АЦП. Передаточная характеристика может быть реализована со смещением -1/2 LSB (см. рис. 2). Это достигается смещением передаточной характеристики влево. LSB (LeastSignificantBit) — наименьший значащий разряд или наименьшее значение напряжение, которое может быть измерено АЦП.
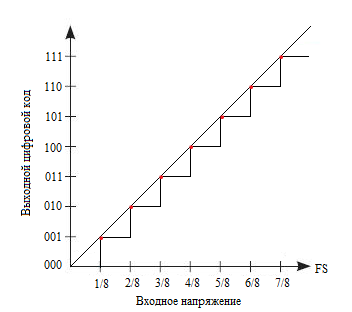
Рис. 1. Идеальная передаточная характеристика
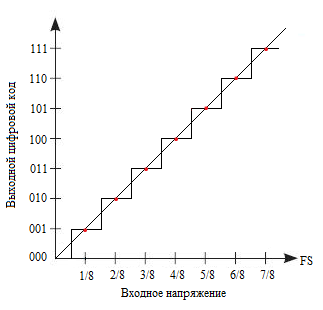
Рис. 2. Смещенная идеальная передаточная характеристика
Из-за технологического разброса параметров при изготовлении интегральных микросхем реальные АЦП не имеют идеальной передаточной характеристики. Отклонения от идеальной передаточной характеристики определяют статическую погрешность АЦП.
Статическая погрешность описывается следующими статическими характеристиками:
1) Аддитивная погрешность (погрешность смещения). Идеальная передаточная характеристика АЦП пересекает начало координат, а первый переход кода происходит при достижении значения 1/2 LSB (при несмещенной передаточной функции — 1 LSB). Аддитивная погрешность — смещение всей передаточной характеристики относительно идеальной, как показано на рис. 3.
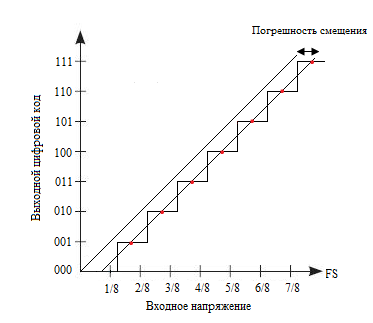
Рис. 3. Аддитивная погрешность
2) Мультипликативная погрешность (погрешность полной шкалы) представляет собой разность между идеальной и реальной передаточными характеристиками в точке максимального выходного значения при условии отсутствия смещения (см. рис. 4). Это проявляется как изменение наклона передаточной функции.
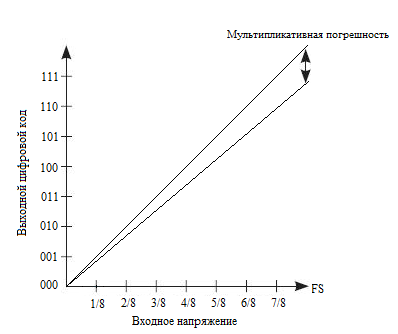
Рис. 4. Погрешность полной шкалы
3) Дифференциальнаянелинейность (Differential Non-Linearity). У идеальной передаточной характеристики АЦП ширина каждого уровня должна быть одинакова. Разница в длине горизонтальных отрезков этой кусочно-линейной функции из «ступеней» представляет собой дифференциальную нелинейность.Разность напряжений между каждым кодовым переходом должна быть равна величине 1 LSB. Отклонение этой разности от LSB определяются как дифференциальная нелинейность (см. рис. 5).
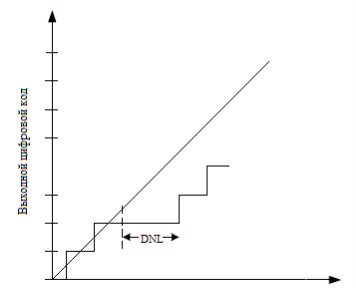
Рис. 5. Дифференциальная нелинейность
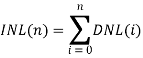
4) Интегральная нелинейность (IntegralNon-Linearity) — это погрешность, которая вызывается отклонением линейной функции передаточной характеристики АЦП от прямой линии, как показано на рисунке 6. Обычно передаточная функция с интегральной нелинейностью аппроксимируется прямой линией по методу наименьших квадратов. Часто аппроксимирующей прямой просто соединяют наименьшее и наибольшее значения. Интегральную нелинейность определяют путем сравнения напряжений, при которых происходят кодовые переходы. Для идеального АЦП эти переходы будут происходить при значениях входного напряжения, точно кратных 1 LSB. А для реального преобразователя такое условие может выполняться с погрешностью. Разность между «идеальными» уровнями напряжения, при которых происходит кодовый переход, и их реальными значениями выражается в единицах LSB и называется интегральной нелинейностью.
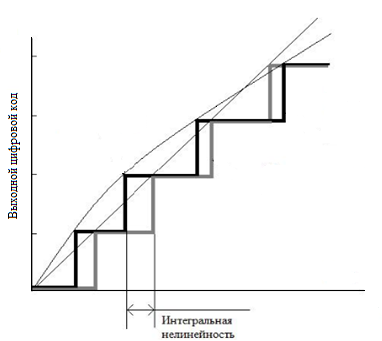
Рис. 6. Интегральная нелинейность
Для расчета интегральной и дифференциальной нелинейностей можно использовать гистограммный метод. Он заключается в том, что полученного цифрового сигнала вычисляются идеальное и реальное распределение кодов. Далее вычисляется их отношение. На рисунке 7 представлено распределение для реального шестиразрядного АЦП некоторого синусоидального сигнала.
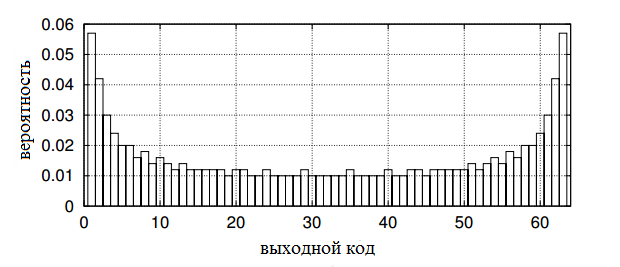
Рис. 7. Распределение кодов в реальном АЦП
Если бы тот же самый сигнал обрабатывался идеальным шестиразрядным АЦП, распределение кодов выглядело бы как показано на рисунке 8.

Рис. 8. Распределение кодов в идеальном АЦП
Идеальное распределение кодов для синусоидального сигнала выглядит следующим образом:


— номер цифрового кода;
— разрядность АЦП;

.
Дифференциальная нелинейность рассчитывается по следующей формуле:
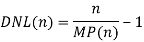
— номер цифрового кода;

— количество отсчетов (длина выборки);
 — вероятность распределения — го кода.
— вероятность распределения — го кода.
Интегральная нелинейность рассчитывается как:
Следует отметить, что для использования гистограммного метода длина выборки должна быть большой. Существуют методики для получения нужного количества длины выборки:
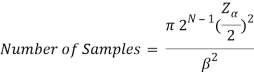
— разрядность АЦП;

— ошибка измерения DNL в LSB;

— уровень доверия.
Общие значения для уровня доверия:
Например, для оценки нелинейностей гистограммным методом 12-ти разрядного АЦП с = 0,1 (LSB) и уровнем доверия 95 % требуется 2471678 отсчетов. Для уровня доверия 99 % требуется 4269446 отсчетов.
Гистограммный метод — простой в использовании метод расчета нелинейностей АЦП. Его недостаток в том, что изначально требуется знать плотность распределения цифровых кодов. Кроме того, он не может похвастаться большой точностью.
Литература:
- Histogram Testing Determines DNL and INL Errors. Режим доступа: https://www.maximintegrated.com/en/app-notes/index.mvp/id/2085
- Как работают аналогово-цифровые преобразователи и что можно узнать из спецификации на АЦП. Режим доступа: http://www.efo.ru/doc/Silabs/Silabs.pl?2089
- Kent H. Lundberg. Analog-to-Digital Converter Testing.
Основные термины (генерируются автоматически): LSB, идеальная передаточная характеристика, интегральная нелинейность, передаточная характеристика, дифференциальная нелинейность, уровень доверия, аддитивная погрешность, длина выборки, прямая линия, распределение кодов.
Похожие статьи
Алгоритм измерения интегральной и дифференциальной.
Обычно передаточная функция с интегральной нелинейностью аппроксимируется прямой линией по методу наименьших квадратов. Часто аппроксимирующей прямой просто соединяют наименьшее и наибольшее значения.
Управление линейной динамической системой в условиях.
Идентификация непараметрической модели. Описание процессов, происходящих в линейных динамических системах, может быть осуществлено, если известен вид одной из следующих характеристик: дифференциального уравнения, передаточной функции.
Алгоритм интервального оценивания параметров нелинейных.
В формуле (2): − оценка дисперсии погрешностей наблюдений, − квантиль распределения Фишера для числа степеней свободы m, n — m и уровне значимости .
Это есть следствие нелинейности модели и взаимосвязи ее параметров
О выборе параметрической модели в задаче непараметрической.
При этом предполагается знание передаточной функции объекта управления или, по меньшей мере, возможность получения его переходной характеристики. В тех случаях, когда структура объекта управления неизвестна, настройка параметров производится эмпирически, что.
Применение модели линейного предсказания для анализа.
Можно, однако, с уверенностью сказать, что ни одна из них не позволяет объяснить все характеристики человеческой речи.
Основные термины (генерируются автоматически): линейное предсказание, передаточная функция, интервал квазистационарности.
О непараметрическом алгоритме моделирования нелинейных.
1. Структура и параметры линейной динамической части системы неизвестны. Предположим некоторый вид нелинейности в объекте – известный с точностью до набора параметров.
где — реально «снятые» значения переходной характеристики ЛДС, то есть сигнал, получаемый на.
Разрешимость одной краевой задачи для.
. уравнения второго порядка с монотонной нелинейностью.
6. Куфнер А., Фучик С. Нелинейные дифференциальные уравнения. Пер. с англ.
Обратная краевая задача с интегральными условиями для гиперболического уравнения второго порядка.
Синтез эффективного тестового сигнала для обнаружения.
Нуль-спектральный метод позволяет по отклику на тестовый сигнал определить тип объекта (линейный или нелинейный), линейные характеристики
Согласно работе [3] импульсы именно такой формы имеют наибольший уровень продуктов нелинейного преобразования.
Алгоритм измерения интегральной и дифференциальной.
Обычно передаточная функция с интегральной нелинейностью аппроксимируется прямой линией по методу наименьших квадратов. Часто аппроксимирующей прямой просто соединяют наименьшее и наибольшее значения.
Управление линейной динамической системой в условиях.
Идентификация непараметрической модели. Описание процессов, происходящих в линейных динамических системах, может быть осуществлено, если известен вид одной из следующих характеристик: дифференциального уравнения, передаточной функции.
Алгоритм интервального оценивания параметров нелинейных.
В формуле (2): − оценка дисперсии погрешностей наблюдений, − квантиль распределения Фишера для числа степеней свободы m, n — m и уровне значимости .
Это есть следствие нелинейности модели и взаимосвязи ее параметров
О выборе параметрической модели в задаче непараметрической.
При этом предполагается знание передаточной функции объекта управления или, по меньшей мере, возможность получения его переходной характеристики. В тех случаях, когда структура объекта управления неизвестна, настройка параметров производится эмпирически, что.
Применение модели линейного предсказания для анализа.
Можно, однако, с уверенностью сказать, что ни одна из них не позволяет объяснить все характеристики человеческой речи.
Основные термины (генерируются автоматически): линейное предсказание, передаточная функция, интервал квазистационарности.
О непараметрическом алгоритме моделирования нелинейных.
1. Структура и параметры линейной динамической части системы неизвестны. Предположим некоторый вид нелинейности в объекте – известный с точностью до набора параметров.
где — реально «снятые» значения переходной характеристики ЛДС, то есть сигнал, получаемый на.
Разрешимость одной краевой задачи для.
. уравнения второго порядка с монотонной нелинейностью.
6. Куфнер А., Фучик С. Нелинейные дифференциальные уравнения. Пер. с англ.
Обратная краевая задача с интегральными условиями для гиперболического уравнения второго порядка.
Синтез эффективного тестового сигнала для обнаружения.
Нуль-спектральный метод позволяет по отклику на тестовый сигнал определить тип объекта (линейный или нелинейный), линейные характеристики
Согласно работе [3] импульсы именно такой формы имеют наибольший уровень продуктов нелинейного преобразования.
- Как издать спецвыпуск?
- Правила оформления статей
- Оплата и скидки
Похожие статьи
Алгоритм измерения интегральной и дифференциальной.
Обычно передаточная функция с интегральной нелинейностью аппроксимируется прямой линией по методу наименьших квадратов. Часто аппроксимирующей прямой просто соединяют наименьшее и наибольшее значения.
Управление линейной динамической системой в условиях.
Идентификация непараметрической модели. Описание процессов, происходящих в линейных динамических системах, может быть осуществлено, если известен вид одной из следующих характеристик: дифференциального уравнения, передаточной функции.
Алгоритм интервального оценивания параметров нелинейных.
В формуле (2): − оценка дисперсии погрешностей наблюдений, − квантиль распределения Фишера для числа степеней свободы m, n — m и уровне значимости .
Это есть следствие нелинейности модели и взаимосвязи ее параметров
О выборе параметрической модели в задаче непараметрической.
При этом предполагается знание передаточной функции объекта управления или, по меньшей мере, возможность получения его переходной характеристики. В тех случаях, когда структура объекта управления неизвестна, настройка параметров производится эмпирически, что.
Применение модели линейного предсказания для анализа.
Можно, однако, с уверенностью сказать, что ни одна из них не позволяет объяснить все характеристики человеческой речи.
Основные термины (генерируются автоматически): линейное предсказание, передаточная функция, интервал квазистационарности.
О непараметрическом алгоритме моделирования нелинейных.
1. Структура и параметры линейной динамической части системы неизвестны. Предположим некоторый вид нелинейности в объекте – известный с точностью до набора параметров.
где — реально «снятые» значения переходной характеристики ЛДС, то есть сигнал, получаемый на.
Разрешимость одной краевой задачи для.
. уравнения второго порядка с монотонной нелинейностью.
6. Куфнер А., Фучик С. Нелинейные дифференциальные уравнения. Пер. с англ.
Обратная краевая задача с интегральными условиями для гиперболического уравнения второго порядка.
Синтез эффективного тестового сигнала для обнаружения.
Нуль-спектральный метод позволяет по отклику на тестовый сигнал определить тип объекта (линейный или нелинейный), линейные характеристики
Согласно работе [3] импульсы именно такой формы имеют наибольший уровень продуктов нелинейного преобразования.
Алгоритм измерения интегральной и дифференциальной.
Обычно передаточная функция с интегральной нелинейностью аппроксимируется прямой линией по методу наименьших квадратов. Часто аппроксимирующей прямой просто соединяют наименьшее и наибольшее значения.
Управление линейной динамической системой в условиях.
Идентификация непараметрической модели. Описание процессов, происходящих в линейных динамических системах, может быть осуществлено, если известен вид одной из следующих характеристик: дифференциального уравнения, передаточной функции.
Алгоритм интервального оценивания параметров нелинейных.
В формуле (2): − оценка дисперсии погрешностей наблюдений, − квантиль распределения Фишера для числа степеней свободы m, n — m и уровне значимости .
Это есть следствие нелинейности модели и взаимосвязи ее параметров
О выборе параметрической модели в задаче непараметрической.
При этом предполагается знание передаточной функции объекта управления или, по меньшей мере, возможность получения его переходной характеристики. В тех случаях, когда структура объекта управления неизвестна, настройка параметров производится эмпирически, что.
Применение модели линейного предсказания для анализа.
Можно, однако, с уверенностью сказать, что ни одна из них не позволяет объяснить все характеристики человеческой речи.
Основные термины (генерируются автоматически): линейное предсказание, передаточная функция, интервал квазистационарности.
О непараметрическом алгоритме моделирования нелинейных.
1. Структура и параметры линейной динамической части системы неизвестны. Предположим некоторый вид нелинейности в объекте – известный с точностью до набора параметров.
где — реально «снятые» значения переходной характеристики ЛДС, то есть сигнал, получаемый на.
Разрешимость одной краевой задачи для.
. уравнения второго порядка с монотонной нелинейностью.
6. Куфнер А., Фучик С. Нелинейные дифференциальные уравнения. Пер. с англ.
Обратная краевая задача с интегральными условиями для гиперболического уравнения второго порядка.
Синтез эффективного тестового сигнала для обнаружения.
Нуль-спектральный метод позволяет по отклику на тестовый сигнал определить тип объекта (линейный или нелинейный), линейные характеристики
Согласно работе [3] импульсы именно такой формы имеют наибольший уровень продуктов нелинейного преобразования.
Аналого-цифровое преобразование для начинающих
В этой статье рассмотрены основные вопросы, касающиеся принципа действия АЦП различных типов. При этом некоторые важные теоретические выкладки, касающиеся математического описания аналого-цифрового преобразования остались за рамками статьи, но приведены ссылки, по которым заинтересованный читатель сможет найти более глубокое рассмотрение теоретических аспектов работы АЦП. Таким образом, статья касается в большей степени понимания общих принципов функционирования АЦП, чем теоретического анализа их работы.
«
В качестве отправной точки дадим определение аналого-цифровому преобразованию. Аналого-цифровое преобразование – это процесс преобразования входной физической величины в ее числовое представление. Аналого-цифровой преобразователь – устройство, выполняющее такое преобразование. Формально, входной величиной АЦП может быть любая физическая величина – напряжение, ток, сопротивление, емкость, частота следования импульсов, угол поворота вала и т.п. Однако, для определенности, в дальнейшем под АЦП мы будем понимать исключительно преобразователи напряжение-код.
Понятие аналого-цифрового преобразования тесно связано с понятием измерения. Под измерением понимается процесс сравнения измеряемой величины с некоторым эталоном, при аналого-цифровом преобразовании происходит сравнение входной величины с некоторой опорной величиной (как правило, с опорным напряжением). Таким образом, аналого-цифровое преобразование может рассматриваться как измерение значения входного сигнала, и к нему применимы все понятия метрологии, такие, как погрешности измерения.
Основные характеристики АЦП
АЦП имеет множество характеристик, из которых основными можно назвать частоту преобразования и разрядность. Частота преобразования обычно выражается в отсчетах в секунду (samples per second, SPS), разрядность – в битах. Современные АЦП могут иметь разрядность до 24 бит и скорость преобразования до единиц GSPS (конечно, не одновременно). Чем выше скорость и разрядность, тем труднее получить требуемые характеристики, тем дороже и сложнее преобразователь. Скорость преобразования и разрядность связаны друг с другом определенным образом, и мы можем повысить эффективную разрядность преобразования, пожертвовав скоростью.
Существует множество типов АЦП, однако в рамках данной статьи мы ограничимся рассмотрением только следующих типов:
- АЦП параллельного преобразования (прямого преобразования, flash ADC)
- АЦП последовательного приближения (SAR ADC)
- дельта-сигма АЦП (АЦП с балансировкой заряда)
Наибольшим быстродействием и самой низкой разрядностью обладают АЦП прямого (параллельного) преобразования. Например, АЦП параллельного преобразования TLC5540 фирмы Texas Instruments обладает быстродействием 40MSPS при разрядности всего 8 бит. АЦП данного типа могут иметь скорость преобразования до 1 GSPS. Здесь можно отметить, что еще большим быстродействием обладают конвейерные АЦП (pipelined ADC), однако они являются комбинацией нескольких АЦП с меньшим быстродействием и их рассмотрение выходит за рамки данной статьи.
Среднюю нишу в ряду разрядность-скорость занимают АЦП последовательного приближения. Типичными значениями является разрядность 12-18 бит при частоте преобразования 100KSPS-1MSPS.
Наибольшей точности достигают сигма-дельта АЦП, имеющие разрядность до 24 бит включительно и скорость от единиц SPS до единиц KSPS.
Еще одним типом АЦП, который находил применение в недавнем прошлом, является интегрирующий АЦП. Интегрирующие АЦП в настоящее время практически полностью вытеснены другими типами АЦП, но могут встретиться в старых измерительных приборах.
АЦП прямого преобразования
АЦП прямого преобразования получили широкое распространение в 1960-1970 годах, и стали производиться в виде интегральных схем в 1980-х. Они часто используются в составе «конвейерных» АЦП (в данной статье не рассматриваются), и имеют разрядность 6-8 бит при скорости до 1 GSPS.
Архитектура АЦП прямого преобразования изображена на рис. 1

Рис. 1. Структурная схема АЦП прямого преобразования
Принцип действия АЦП предельно прост: входной сигнал поступает одновременно на все «плюсовые» входы компараторов, а на «минусовые» подается ряд напряжений, получаемых из опорного путем деления резисторами R. Для схемы на рис. 1 этот ряд будет таким: (1/16, 3/16, 5/16, 7/16, 9/16, 11/16, 13/16) Uref, где Uref – опорное напряжение АЦП.
Пусть на вход АЦП подается напряжение, равное 1/2 Uref. Тогда сработают первые 4 компаратора (если считать снизу), и на их выходах появятся логические единицы. Приоритетный шифратор (priority encoder) сформирует из «столбца» единиц двоичный код, который фиксируется выходным регистром.
Теперь становятся понятны достоинства и недостатки такого преобразователя. Все компараторы работают параллельно, время задержки схемы равно времени задержки в одном компараторе плюс время задержки в шифраторе. Компаратор и шифратор можно сделать очень быстрыми, в итоге вся схема имеет очень высокое быстродействие.
Но для получения N разрядов нужно 2^N компараторов (и сложность шифратора тоже растет как 2^N). Схема на рис. 1. содержит 8 компараторов и имеет 3 разряда, для получения 8 разрядов нужно уже 256 компараторов, для 10 разрядов – 1024 компаратора, для 24-битного АЦП их понадобилось бы свыше 16 млн. Однако таких высот техника еще не достигла.
АЦП последовательного приближения
АЦП последовательного приближения реализует алгоритм «взвешивания», восходящий еще к Фибоначчи. В своей книге «Liber Abaci» (1202 г.) Фибоначчи рассмотрел «задачу о выборе наилучшей системы гирь», то есть о нахождении такого ряда весов гирь, который бы требовал для нахождения веса предмета минимального количества взвешиваний на рычажных весах. Решением этой задачи является «двоичный» набор гирь. Подробнее о задаче Фибоначчи можно прочитать, например, здесь: http://www.goldenmuseum.com/2015AMT_rus.html.
Аналого-цифровой преобразователь последовательного приближения (SAR, Successive Approximation Register) измеряет величину входного сигнала, осуществляя ряд последовательных «взвешиваний», то есть сравнений величины входного напряжения с рядом величин, генерируемых следующим образом:
1. на первом шаге на выходе встроенного цифро-аналогового преобразователя устанавливается величина, равная 1/2Uref (здесь и далее мы предполагаем, что сигнал находится в интервале (0 – Uref).
2. если сигнал больше этой величины, то он сравнивается с напряжением, лежащим посередине оставшегося интервала, т.е., в данном случае, 3/4Uref. Если сигнал меньше установленного уровня, то следующее сравнение будет производиться с меньшей половиной оставшегося интервала (т.е. с уровнем 1/4Uref).
3. Шаг 2 повторяется N раз. Таким образом, N сравнений («взвешиваний») порождает N бит результата.
Рис. 2. Структурная схема АЦП последовательного приближения.
Таким образом, АЦП последовательного приближения состоит из следующих узлов:
1. Компаратор. Он сравнивает входную величину и текущее значение «весового» напряжения (на рис. 2. обозначен треугольником).
2. Цифро-аналоговый преобразователь (Digital to Analog Converter, DAC). Он генерирует «весовое» значение напряжения на основе поступающего на вход цифрового кода.
3. Регистр последовательного приближения (Successive Approximation Register, SAR). Он осуществляет алгоритм последовательного приближения, генерируя текущее значение кода, подающегося на вход ЦАП. По его названию названа вся данная архитектура АЦП.
4. Схема выборки-хранения (Sample/Hold, S/H). Для работы данного АЦП принципиально важно, чтобы входное напряжение сохраняло неизменную величину в течение всего цикла преобразования. Однако «реальные» сигналы имеют свойство изменяться во времени. Схема выборки-хранения «запоминает» текущее значение аналогового сигнала, и сохраняет его неизменным на протяжении всего цикла работы устройства.
Достоинством устройства является относительно высокая скорость преобразования: время преобразования N-битного АЦП составляет N тактов. Точность преобразования ограничена точностью внутреннего ЦАП и может составлять 16-18 бит (сейчас стали появляться и 24-битные SAR ADC, например, AD7766 и AD7767).
Дельта-сигма АЦП
И, наконец, самый интересный тип АЦП – сигма-дельта АЦП, иногда называемый в литературе АЦП с балансировкой заряда. Структурная схема сигма-дельта АЦП приведена на рис. 3.
Рис.3. Структурная схема сигма-дельта АЦП.
Принцип действия данного АЦП несколько более сложен, чем у других типов АЦП. Его суть в том, что входное напряжение сравнивается со значением напряжения, накопленным интегратором. На вход интегратора подаются импульсы положительной или отрицательной полярности, в зависимости от результата сравнения. Таким образом, данный АЦП представляет собой простую следящую систему: напряжение на выходе интегратора «отслеживает» входное напряжение (рис. 4). Результатом работы данной схемы является поток нулей и единиц на выходе компаратора, который затем пропускается через цифровой ФНЧ, в результате получается N-битный результат. ФНЧ на рис. 3. Объединен с «дециматором», устройством, снижающим частоту следования отсчетов путем их «прореживания».
Рис. 4. Сигма-дельта АЦП как следящая система
Ради строгости изложения, нужно сказать, что на рис. 3 изображена структурная схема сигма-дельта АЦП первого порядка. Сигма-дельта АЦП второго порядка имеет два интегратора и две петли обратной связи, но здесь рассматриваться не будет. Интересующиеся данной темой могут обратиться к [3].
На рис. 5 показаны сигналы в АЦП при нулевом уровне на входе (сверху) и при уровне Vref/2 (снизу).
Рис. 5. Сигналы в АЦП при разных уровнях сигнала на входе.
Более наглядно работу сигма-дельта АЦП демонстрирует небольшая программа, находящаяся тут: http://designtools.analog.com/dt/sdtutorial/sdtutorial.html.
Теперь, не углубляясь в сложный математический анализ, попробуем понять, почему сигма-дельта АЦП обладают очень низким уровнем собственных шумов.
Рассмотрим структурную схему сигма-дельта модулятора, изображенную на рис. 3, и представим ее в таком виде (рис. 6):
Рис. 6. Структурная схема сигма-дельта модулятора
Здесь компаратор представлен как сумматор, который суммирует непрерывный полезный сигнал и шум квантования.
Пусть интегратор имеет передаточную функцию 1/s. Тогда, представив полезный сигнал как X(s), выход сигма-дельта модулятора как Y(s), а шум квантования как E(s), получаем передаточную функцию АЦП:
То есть, фактически сигма-дельта модулятор является фильтром низких частот (1/(s+1)) для полезного сигнала, и фильтром высоких частот (s/(s+1)) для шума, причем оба фильтра имеют одинаковую частоту среза. Шум, сосредоточенный в высокочастотной области спектра, легко удаляется цифровым ФНЧ, который стоит после модулятора.
Рис. 7. Явление «вытеснения» шума в высокочастотную часть спектра
Однако следует понимать, что это чрезвычайно упрощенное объяснение явления вытеснения шума (noise shaping) в сигма-дельта АЦП.
Итак, основным достоинством сигма-дельта АЦП является высокая точность, обусловленная крайне низким уровнем собственного шума. Однако для достижения высокой точности нужно, чтобы частота среза цифрового фильтра была как можно ниже, во много раз меньше частоты работы сигма-дельта модулятора. Поэтому сигма-дельта АЦП имеют низкую скорость преобразования.
Они могут использоваться в аудиотехнике, однако основное применение находят в промышленной автоматике для преобразования сигналов датчиков, в измерительных приборах, и в других приложениях, где требуется высокая точность. но не требуется высокой скорости.
Немного истории
Самым старым упоминанием АЦП в истории является, вероятно, патент Paul M. Rainey, «Facsimile Telegraph System,» U.S. Patent 1,608,527, Filed July 20, 1921, Issued November 30, 1926. Изображенное в патенте устройство фактически является 5-битным АЦП прямого преобразования.

Рис. 8. Первый патент на АЦП

Рис. 9. АЦП прямого преобразования (1975 г.)
Устройство, изображенное на рисунке, представляет собой АЦП прямого преобразования MOD-4100 производства Computer Labs, 1975 года выпуска, собранный на основе дискретных компараторов. Компараторов 16 штук (они расположены полукругом, для того, чтобы уравнять задержку распространения сигнала до каждого компаратора), следовательно, АЦП имеет разрядность всего 4 бита. Скорость преобразования 100 MSPS, потребляемая мощность 14 ватт.
На следующем рисунке изображена продвинутая версия АЦП прямого преобразования.

Рис. 10. АЦП прямого преобразования (1970 г.)
Устройство VHS-630 1970 года выпуска, произведенное фирмой Computer Labs, содержало 64 компаратора, имело разрядность 6 бит, скорость 30MSPS и потребляло 100 ватт (версия 1975 года VHS-675 имела скорость 75 MSPS и потребление 130 ватт).
W. Kester. ADC Architectures I: The Flash Converter. Analog Devices, MT-020 Tutorial. www.analog.com/static/imported-files/tutorials/MT-020.pdf
W. Kester. ADC Architectures II: Successive Approximation ADC. Analog Devices, MT-021 Tutorial. www.analog.com/static/imported-files/tutorials/MT-021.pdf
W. Kester. ADC Architectures III: Sigma-Delta ADC Basics. Analog Devices, MT-022 Tutorial. www.analog.com/static/imported-files/tutorials/MT-022.pdf
W. Kester. ADC Architectures IV: Sigma-Delta ADC Advanced Concepts and Applications. Analog Devices, MT-023 Tutorial. www.analog.com/static/imported-files/tutorials/MT-023.pdf