1. Изучение свойств управляемого объекта
Управляемый объект — это техническое средство, предназначенное для замены труда человека в технологических операциях и функционирующее в соответствии с физическими законами, положенными в основу его создания. Функционирование управляемого объекта означает, что в нем протекают технические процессы, ход которых оценивается изменением во времени физических величин. Состояние управляемого объекта определяется значениями этих величин в каждый момент времени, которые называются переменными состояния. Та часть переменных состояния, которая доступна наблюдению или измерению, называется выходными координатами управляемого объекта. Измеряемыми выходными координатами называются те физические величины, значения которых можно определить путём измерения с помощью измерительных преобразователей. Наблюдаемыми считаются те выходные координаты, значения которых можно вычислить по значениям измеряемых выходных координат по известным соотношениям между ними в силу физических законов.
Так как управляемый объект предназначен для выполнения определённых технологических операций, то для правильного функционирования объекта ход технического процесса в нем должен быть подчинён определённой совокупности правил и предписаний. Эта совокупность правил и предписаний, ведущая к правильному ходу технического процесса в управляемом объекте, называется алгоритмом его функционирования. Для обеспечения правильности хода технического процесса в управляемом объекте его состояние должно изменяться. Изменение состояния управляемого объекта происходит под действием на него физических величин, способных вызвать это изменение, и которые бывают двух видов – управляющие воздействия и возмущения. Управляющие воздействия – это специально организованные воздействия извне для наилучшего достижения алгоритма функционирования управляемого объекта. Для осуществления управляющих воздействий в управляемом объекте при его создании предусматриваются специальные функциональные устройства – управляющие органы. Управляющие воздействия подаются непосредственно на управляющие органы управляемого объекта. Поэтому точки приложения управляющих воздействий известны и эти точки принято называть входами управляемого объекта. Изменение состояния управляющих органов приводит к изменению состояния всего управляемого объекта. Характерной особенностью взаимодействия управляющих органов с управляемым объектом является то, что энергия, необходимая для изменения состояния управляющих органов, гораздо меньше энергии, возникающей в управляемом объекте при изменении его состояния под действием управляющих воздействий. Возмущения препятствуют нормальному ходу технического процесса в управляемом объекте и бывают двух видов – нагрузка и помехи. Нагрузка оказывает влияние на состояние управляемого объекта в силу физических законов, на которых основано его функционирование. Помехи характеризуют влияние окружающей среды на состояние управляемого объекта. Точки приложения возмущений обычно заранее неизвестны. На рис.1 показан некоторый управляемый объект УО, имеющий органы управления ОУ и выходные координаты , на входы которого подаются управляющие воздействия и на который действуют возмущения :
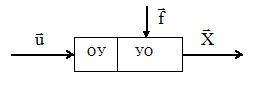
Рис.1 Условное обозначение управляемого объекта
Между указанными физическими величинами при функционировании объекта существует связь, которую можно записать следующим образом:
где под А следует понимать оператор для динамических объектов или функцию для объектов статических. И в том, и в другом случаях А учитывает свойства объекта. Другими словами, в первом случае связь между выходными координатами, управляющими воздействиями и возмущениями описывается интегро-дифференциальными уравнениями, а во втором — алгебраическими. Для правильного функционирования управляемого объекта необходимо, чтобы выходные координаты управляемого объекта изменялись в соответствии с заданным алгоритмом его функционирования. Алгоритм функционирования представляет собой заданный закон изменения выходных координат, который можно записать в общем виде следующим образом:
Для систем стабилизации , а для следящих систем является заранее неизвестной функцией времени. Цель управления состоит в том, чтобы в любой момент времени . Однако это условие соответствует идеальному случаю управления, которого на практике не получить. В реальных условиях цель управления формулируется менее жестко: Как отмечалось выше, достижение цели управления осуществляется за счёт формирования соответствующим образом управляющих воздействий.
Анализ существующего состояния, объективных потребностей и реальных возможностей управляемого объекта
Аманназаров, Д. А. Анализ существующего состояния, объективных потребностей и реальных возможностей управляемого объекта / Д. А. Аманназаров, К. Х. Мухаммедов. — Текст : непосредственный // Молодой ученый. — 2022. — № 22 (417). — С. 142-144. — URL: https://moluch.ru/archive/417/92383/ (дата обращения: 16.03.2024).
Первой составной частью стадии цикла управления является анализ существующего состояния управляемой экономической системы. Без знания того, в каком состоянии она находится, невозможно принять объективные решения и осуществить другие функции управления. Анализ позволяет раскрыть качественные и количественные характеристики управляемых процессов по отношению к среде. Глубину и конкретные направления анализа определяет необходимая степень подробности, т. е. масштаб и сложность процессов, являющихся предметом управления. Естественно, что анализ состояния всей экономики в целом для регулирования макроэкономических пропорций отличается по глубине и структуре от анализа состояния, например, производственного участка. Важно иметь в виду, что анализ состояния управляемого объекта должен быть подчинен целям соответствующего цикла управления. Характер целей необходимо учитывать при определении глубины, структуры, качества и количества функций управления, которые являются предметом анализа существующего состояния управляемого объекта.
Второй неотъемлемой составляющей первой стадии управленческого цикла является анализ объективных потребностей, которые призвана удовлетворить управляемая экономическая система. Определение этих потребностей позволяет сформировать основные представления о возможных современных и перспективных целях развития конкретного управляемого объекта и о динамике их изменений в зависимости от развития потребностей и интересов.
Третьей, еще более важной составляющей первой стадии управленческого цикла является анализ реальных возможностей развития управляемого объекта с учетом потребностей, удовлетворение которых он призван обеспечивать. Эта часть анализа включает в себя два на первый взгляд противоречивых требования:
1) познать максимум возможностей, существующих в данной области;
2) реально оценить, «отфильтровать», выделить потенциальные возможности с точки зрения имеющихся условий для их реализации.
Качество анализа реальных возможностей определяется прежде всего тем, насколько широко выявлены резервы, открываемые научно-технической революцией, и вместе с тем насколько правильно оценены причины, лимитирующие их реализацию.
Основные требования к качеству анализа
Приведенные составные части анализа, образующие первую стадию цикла управления, несмотря на свою относительную самостоятельность, представляют собой единый взаимодополняющий и взаимообусловленный комплекс. Требования, соблюдение которых является важным условием качества анализа, также относятся к аналитической деятельности как к единому целому, как к относительно самостоятельному комплексу функций управления. Имеются в виду следующие требования: конкретность, объективность, комплексность, целенаправленность, постоянное осуществление аналитической деятельности.
Конкретность анализа состоит в его связи с реально существующими или потенциально возможными объектами и процессами в экономике в целом и в ее отдельных составляющих. Он должен опираться на конкретные факты, отражать реально существующие явления.
При анализе перспективного состояния (прогнозах) требование конкретности трансформируется в требование научно обоснованной аргументации. Последняя предполагает объективность анализа, что означает использование правдивой информации. Этому положению (в частности, при прогнозировании) не противоречит использование субъективных представлений о некоторых аспектах будущего развития управляемых процессов. Однако их подбор и взаимное сравнение должны осуществляться так, чтобы в максимальной степени «объективизировать» перспективные представления.
Важной составной частью требований к качеству анализа является его комплексность (в пространстве и времени), которая позволяет получить достаточную информацию о состоянии и тенденциях развития управляемых процессов (а также других процессов, связанных с ними). Принимать объективные и рациональные решения по проблемам дальнейшего развития управляемых объектов. Сущность комплексности анализа заключается в необходимости выявить внутренние противоречия в функционирования и развитии управляемого объекта, определить их глубину и приоритет с учетом основной цели развития объекта. Объективное выявленные существующих, возникающих и перспективных противоречий внутри управляемых объектов и в их связях со средой противоречий между потребностями и возможностями, между потребностями и реальным состоянием, между фактическим состоянием и возможностями — позволяет определить решающие и внешние источники развития, а также приоритетность проблем, которые необходимо решить в интересах динамичного и пропорционального развития.
Содержание, методы и формы анализа как первой фазы цикла управления определяются воздействием системы факторов. Учет их можно двух различных типов анализа: показать на примере
— анализа как первой стадии простого цикла управления процессом производства новой детали в цехе;
— анализа как первой стадии цикла управления процессом развития социалистической экономики на период одного года.
В первом случае субъектом управления является мастер. Проводимый им анализ существующего состояния, потребностей и возможностей исходит из основной характеристики управления в цехе. Целью и одновременно потребностью является задача наладить производство конкретной детали. С этих позиций он приступает к анализу существующего положения в цехе, т. e. сравнивает технические и технологические характеристики машин и оборудования, а также квалификацию работников с требованиями технических условий производства данной детали. Он анализирует степень их загруженности и оценивает возможности различных подходов к реализации возложен вой на него задачи. Одновременно он должен изучить количество необходимого живого труда во взаимосвязи с использованием станков, оборудования. Знание мастером мощности и возможностей станков и оборудования, находящихся на его участке, степени их загруженности, квалификации и способностей своих работников существенно упрощает процесс анализа. На проведение анализа от мастера обычно требуется относительно немного времени. Требования к качеству анализа воспринимаются им как сами собой разумеющиеся и, как правило, не порождают необходимости в особом внимании к этим вопросам.
Намного более сложная ситуация возникает в циклах управления крупными комплексными объектами, особенно если берутся достаточно длительные периоды времени. Продемонстрируем на примере анализа современного со стояния, потребностей и возможностей развития на период годового цикла управления. В этом случае соблюдение основных требований, предъявляемых к анализу, является важной предпосылкой как качества самого анализа, так и качества принятого плана и его реализации.
При управлении сложными объектами, обладающими значительной инерцией, центр тяжести анализа концентрируется на прогнозировании будущих потребностей и возможностей. Такая ситуация возникает при управлении экономическими единицами, начиная с предприятий и кончая народным хозяйством в целом. Управление этими единицами невозможно без надежного прогнозирования их будущего развития.
Прогнозирование основывается на информации о современном состоянии и на прогностической информации. Последняя представляет собой логически осмысленную информацию, на основании которой выявлены тенденции и сделаны предположения о возможных вариантах будущего развития управляемой системы.
Каждый из них имеет свой объект прогнозирования, свои специфические методы исследования. Однако независимость объектов прогнозирования относительна, поскольку каждый из них — неотъемлемая составная часть общего, которое либо ускоряет, либо, напротив, тормозит его развитие. Такое же влияние на объект оказывают и составные части общего. Например, развитие науки и техники существенно влияет на количественные и качественные стороны образа жизни определенный образ жизни, в свою очередь, стимулирует развитие некоторых областей науки и техники. Аналогичная зависимость между военно-стратегической ситуацией и состоянием развития науки и техники и т. п.
Такая непрерывно функционирующая система взаимосвязанных прогнозов позволяет создать представление о развитии общественных потребностей и интересов и о реальных возможностях их удовлетворения. В этом и со стоит основная задача анализа других составных частей цикла управления, прежде всего процессов планирования экономических систем. Значение прогнозов потребностей, интересов и реальных возможностей их удовлетворения, а также связанных с этим прогнозом будущего развития управляемого объекта нельзя сводить лишь к необходимости управлять народным хозяйством как единым целым. Анализ должен стать исходным пунктом управления также отраслями (подотраслями) и производственно-хозяйственными единицами.
- Антонцев В. А., Бедный Б. И. Инновационный менеджмент. Учебник и практикум для СПО. — М.: Юрайт. 2018.
- Ксенофонтова Х. З. Корпоративный менеджмент. Учебник. — М.: КноРус. 2020.
- Менеджмент. Учебник для СПО / ред. Кузнецов Ю. В. — М.: Юрайт 2019.
- Управление Экономикой. Галушка И. — Издательство политической литературы, Москва 1985.
Основные термины (генерируются автоматически): анализ, качество анализа, анализ состояния, будущее развитие, возможность, потребность, стадий цикла управления, существующее состояние, требование, аналитическая деятельность.
СИСТЕМА УПРАВЛЕНИЯ ПО СОСТОЯНИЮ ОБЪЕКТА УПРАВЛЕНИЯ С НАБЛЮДАТЕЛЕМ И РЕГУЛЯТОРОМ СОСТОЯНИЯ Текст научной статьи по специальности «Строительство и архитектура»
Аннотация научной статьи по строительству и архитектуре, автор научной работы — Безмен П. А.
В работе предложена модель системы управления по состоянию объекта управления, включающую в себя наблюдатель и регулятор состояния. Задающим воздействием для данной системы управления являются требуемые значения переменных состояния управляемого объекта. В качестве наблюдателя состояния объекта управления в модели системы управления используется система « расширенный фильтр Калмана — адаптивный цифровой фильтр » (система РФК-АЦФ). Описаны структура и принцип работы регулятора состояния системы управления . Изложен адаптивный алгоритм регулятора состояния . Регулятор состояния с алгоритмом адаптации для формирования вектора выхода (ошибки) регулятора использует выходные данные системы РФК-АЦФ: вектор оценки состояния, выполненной РФК системы РФК-АЦФ, и вектор скорректированной оценки состояния, выполненной АЦФ системы РФК-АЦФ. Алгоритм адаптации регулятора учитывает выходные данные системы РФК-АЦФ таким образом, чтобы сформировать наиболее достоверный вектор выхода регулятора. Для подтверждения эффективности рассматриваемой системы управления приведены результаты численного моделирования процесса управления мобильным роботом с гусеничным движителем: сравниваются результаты моделирования работы предлагаемой системы управления с результатами моделирования работы системы управления , использующей РФК в качестве наблюдателя состояния . Сочетание наблюдателя состояния и регулятора состояния в составе предлагаемой системы управления делает возможным управление динамическими объектами с недоступными непосредственному измерению переменными состояния и обладающими непериодическими внешними возмущениями.
i Надоели баннеры? Вы всегда можете отключить рекламу.
Похожие темы научных работ по строительству и архитектуре , автор научной работы — Безмен П. А.
КОМПЛЕКСИРОВАНИЕ ДАННЫХ СИСТЕМЫ УПРАВЛЕНИЯ МОБИЛЬНЫМ ГУСЕНИЧНЫМ РОБОТОМ
АНАЛИТИЧЕСКОЕ РЕЗЕРВИРОВАНИЕ В СИСТЕМЕ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ АВИАЦИОННОГО ТУРБОРЕАКТИВНОГО ДВУХКОНТУРНОГО ДВИГАТЕЛЯ НА ОСНОВЕ ОПТИМАЛЬНЫХ НАБЛЮДАТЕЛЕЙ
ИССЛЕДОВАНИЕ НАБЛЮДАТЕЛЕЙ СОСТОЯНИЯ ДЛЯ ПРИМЕНЕНИЯ В УПРАВЛЕНИИ ЭЛЕКТРОПРИВОДАМИ
ИССЛЕДОВАНИЕ СЛЕДЯЩЕЙ СИСТЕМЫ В MATLAB ПРИ ВОЗДЕЙСТВИИ ВОЗМУЩЕНИЯ В СИСТЕМЕ УПРАВЛЕНИЯ
МОДАЛЬНЫЙ СИНТЕЗ ОЦЕНИВАТЕЛЯ НЕИЗМЕРЯЕМЫХ ПЕРЕМЕННЫХ СОСТОЯНИЯ ДЛЯ СИСТЕМЫ СТАБИЛИЗАЦИИ КУРСА СУДНА
i Не можете найти то, что вам нужно? Попробуйте сервис подбора литературы.
i Надоели баннеры? Вы всегда можете отключить рекламу.
A CONTROL SYSTEM ON A CONTROLLED OBJECT STATE WITH AN OBSERVER AND A STATE REGULATOR
The paper proposes the model of a control system based on the controlled object state. The model includes a state observer and a state controller. The reference signal for this control system is the required values of the controlled object state variables. As a state observer of a controlled object in the control system model, the system «extended Kalman filter — adaptive digital filter» (the EKF-ADF system) is used. The structure and operation principle of the control system state controller are described. The adaptive algorithm of the control system state controller is presented. The control system state controller with the adaptive algorithm uses the output data of the EKF-ADF system to form the controller output (error) vector. The output data consist of the state estimation vector performed by the EKF of the EKF-ADF system and the vector of the corrected state estimation performed by the ADF of the EKF-ADF system. The adaptive algorithm of the control system state controller takes into account the output data of the EKF-ADF system in such a way as to form the most reliable state controller output vector. To confirm the effectiveness of the considered control system, the control process numerical simulation results of a mobile robot with a caterpillar mover are presented: the proposed control system simulation results are compared with the simulation results of the control system that uses the EKF as a state observer. The combination of the state observer and the state regulator as part of the proposed control system makes it possible to control dynamic objects with state variables which are inaccessible to direct measurement and have non-periodic external disturbances.
Текст научной работы на тему «СИСТЕМА УПРАВЛЕНИЯ ПО СОСТОЯНИЮ ОБЪЕКТА УПРАВЛЕНИЯ С НАБЛЮДАТЕЛЕМ И РЕГУЛЯТОРОМ СОСТОЯНИЯ»
МАШИНОСТРОЕНИЕ И МАШИНОВЕДЕНИЕ
DOI: 10.34031/2071-7318-2022-8-1-102-120 Безмен П.А.
Юго-Западный государственный университет E-mail: pbezmen@yahoo.com
СИСТЕМА УПРАВЛЕНИЯ ПО СОСТОЯНИЮ ОБЪЕКТА УПРАВЛЕНИЯ С НАБЛЮДАТЕЛЕМ И РЕГУЛЯТОРОМ СОСТОЯНИЯ
Аннотация. В работе предложена модель системы управления по состоянию объекта управления, включающую в себя наблюдатель и регулятор состояния. Задающим воздействием для данной системы управления являются требуемые значения переменных состояния управляемого объекта. В качестве наблюдателя состояния объекта управления в модели системы управления используется система «расширенный фильтр Калмана — адаптивный цифровой фильтр» (система РФК-АЦФ). Описаны структура и принцип работы регулятора состояния системы управления. Изложен адаптивный алгоритм регулятора состояния.
Регулятор состояния с алгоритмом адаптации для формирования вектора выхода (ошибки) регулятора использует выходные данные системы РФК-АЦФ: вектор оценки состояния, выполненной РФК системы РФК-АЦФ, и вектор скорректированной оценки состояния, выполненной АЦФ системы РФК-АЦФ. Алгоритм адаптации регулятора учитывает выходные данные системы РФК-АЦФ таким образом, чтобы сформировать наиболее достоверный вектор выхода регулятора.
Для подтверждения эффективности рассматриваемой системы управления приведены результаты численного моделирования процесса управления мобильным роботом с гусеничным движителем: сравниваются результаты моделирования работы предлагаемой системы управления с результатами моделирования работы системы управления, использующей РФК в качестве наблюдателя состояния.
Сочетание наблюдателя состояния и регулятора состояния в составе предлагаемой системы управления делает возможным управление динамическими объектами с недоступными непосредственному измерению переменными состояния и обладающими непериодическими внешними возмущениями.
Ключевые слова: система управления, робототехника, расширенный фильтр Калмана, адаптивный цифровой фильтр, наблюдатель состояния, регулятор состояния.
Введение. В системах управления, в частности, системах управления мобильной робототехникой, целью процесса управления является формирование входного воздействия «, при котором управляемая система из текущего состояния х(0) переходит в желаемое состояние х(Т) за конечное время Т. Управляемость системы зависит от её структуры, состава управляющих параметров и их значений, её энергетических ресурсов и вычислительных ресурсов системы управления. Управляемость характеризуется наличием необходимых для выполнения управления воздействий, составляющих вектор u.
Многим алгоритмам управления роботами требуется возможность получения значений элементов вектора х текущего состояния управляемой системы путем непосредственного измерения значений элементов данного вектора при помощи датчиков физических величин, что редко бывает осуществимо. В случае невозможности получения данных текущего состояния системы с использованием датчиков физических величин важным является косвенное определение текущего состояния. Фильтры Калмана [1 — 3], как
средство оценивания состояния управляемой системы, позволяют выполнить преобразование (например, комплексирование) данных (таких, как информация датчиков) с целью косвенного определения состояния управляемой системы.
Опишем модель некоторой управляемой системы выражениями:
х(к +1) = F(х(к), «(к), к) + w, (1) у(к) = H(х(к), «(к), к) + v, (2) где х(к) — вектор состояния, размерность вектора п;
«(к) — вектор управляющих воздействий, размерность вектора е;
у(к) — вектор выхода системы, размерность вектора т;
¥(•) — некоторая нелинейная (гладкая) вектор-функция процесса изменения состояния размерностью п, имеющая частные производные первого порядка по всем своим переменным;
#(•) — некоторая нелинейная (гладкая) вектор-функция процесса наблюдений размерностью т, имеющая частные производные первого порядка по всем своим переменным;
w(k) — вектор шума процесса, размерность вектора п — характеризуется ковариационной матрицей Q(k) — матрицей ковариаций шума процесса размерностью пхп.
у(^) — вектор шума измерения, размерность вектора m — характеризуется ковариационной
матрицей R(k) — матрицей ковариаций ошибок измерения размерностью mxm;
k — некоторый текущий момент времени; (к + 1) — следующий момент времени. Предположим, что данная нелинейная модель управляемой системы известна и может быть линеаризована посредством матриц Якоби:
где JFx(к) — пхп-матрица Якоби частных
производных функции Т(х(^), u(k), k) по х (матрица коэффициентов (динамики) системы);
JFu (к) — пхе-матрица Якоби частных производных функции Т(х(^), и(к), k) по и (матрица коэффициентов входа (управления));
JHx (к) — „хп-матрица Якоби частных производных функции Н(х(к), и(к), k) по х (матрица коэффициентов выхода системы);
Объекты автоматизации и их характеристики
Объекты автоматизации (объекты управления) — это отдельные установки, станки, машины, агрегаты, аппараты, комплексы машин и аппаратов, которыми нужно управлять. Они очень разнообразны по своему назначению, устройству и принципу действия.
Объект автоматизации является основной составной частью автоматической системы, определяющей характер системы, поэтому его изучению уделяется исключительное внимание. Сложность объекта определяется главным образом степенью его изученности и многообразием выполняемых им функций. Результаты исследований объекта должны быть представлены в виде четких рекомендаций о возможности полной или частичной автоматизации объекта или отсутствии необходимых условий для автоматизации.
Характеристики объектов автоматизации
Проектированию автоматической системы управления должно предшествовать изучение объекта с целью установления связей объекта. В общем случае эти связи можно представить в виде четырех групп переменных.
Контролируемые возмущающим воздействия, совокупность которых образует L-мерный вектор Н = h 1, h2, h 3, . hL . К ним относятся измеряемые переменные, зависящие от внешней среды, например, такие как показатели качества исходных литейных материалов в литейном производстве, количество потребляемого пара в паровом котле, расход воды в проточном водонагревателе, температура воздуха в теплице, изменяющаяся от внешних условий окружающей среды и факторы, влияющие на процесс. Для контролируемых возмущающих воздействий задаются ограничения по условиям технологии.
Показатель технологического процесса, которым необходимо управлять, называют управляемой величиной (координатой), а ту физическую величины, посредством которой управляется показатель технологического процесса, называют управляющим воздействием (входной величиной, координатой).

Управляющие воздействия, совокупность которых образует N -мерный вектор X = х1, х2, х3, . xN. Они независимы от внешней среды и оказывают наиболее существенное влияние на технологический процесс. С их помощью целенаправленно изменяют протекание процесса.
К управляющим воздействиям относятся включение и отключение электродвигателей, электрических нагревателей, исполнительных механизмов, положение регулирующих заслонок, положение задатчиков регуляторов и т. п.
Выходные переменные, совокупность которых образует М-мерный вектор состояния Y = у1, у2, у3, . уМ. Эти переменные являются выходом объекта, характеризующим его состояние и определяющим качественные показатели готового продукта.
Неконтролируемые возмущающие воздействия, совокупность которых образует G-мерный вектор F = f 1, f 2, f 3, . f G . К ним относятся такие возмущения, которые не могут быть измереныпо тем или иным причинам, например из-за отсутствия датчиков.
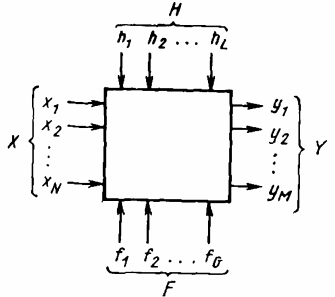
Рис. 1. Входы и выходы объекта автоматизации
Изучение рассмотренных связей объекта, подлежащего автоматизации, может привести к получению двух диаметрально противоположных выводов: между выходными и входными переменными объекта имеется строгая математическая зависимость или между этими переменными отсутствует зависимость, которая может быть выражена достоверной математической формулой.
В теории и практике автоматического управления технологическими процессами накоплен достаточный опыт описания состояния объекта в таких ситуациях. При этом объект рассматривается как одно из звеньев системы автоматического управления. В случаях, когда известна математическая зависимость между выходной переменной у и управляющим входным воздействием х объекта, выделяют две основные формы записи математических описаний — это статические и динамические характеристики объекта.
Статическая характеристика в математической или графической форме выражает зависимость выходных параметров от входных. Бинарные связи обычно имеют четкое математическое описание, например, статическая характеристика весовых дозаторов литейных материалов имеет вид h = km (здесь h — степень деформации упругих элементов; т — масса материала; k — коэффициент пропорциональности, зависящий от свойств материала упругого элемента).
При наличии нескольких переменных параметров в качестве статических характеристик можно использовать номограммы.
Статическая характеристика объекта определяет последующее формирование целей автоматизации. С точки зрения практической реализации в литейном производстве эти цели могут быть сведены к трем видам:
- стабилизации выходных параметров объекта;
- изменению выходных параметров по заданной программе;
- изменению качества некоторых выходных параметров при изменении условий протекания процесса.
Ряд технологических объектов однако не может быть описан математически из-за множества взаимосвязанных факторов, влияющих на ход процесса, наличия неконтролируемых факторов и малоизученности процесса. Такие объекты с точки зрения автоматизации являются сложными. Степень сложности определяется числом входов и выходов объекта. Такие объективные трудности возникают при изучении процессов, снизанных с массо- и теплопередачей. Поэтому при их автоматизации необходимы допущения или условия, которые должны способствовать главной цели автоматизации — повышению эффективности управления путем максимального приближения технологических режимов к оптимальным.
Для изучения сложных объектов используют прием, который заключается в условном представлении объекта в виде «черного ящика». При этом исследуют только внешние связи, ни утреннюю структуру системы не учитывают, т. е. изучают, что делает объект, а не как он функционирует.
Поведение объекта определяют по реакции выходных величин на изменение входных. Основным инструментом для изучения такого объекта являются статистико-математические методы. Методически изучение объекта осуществляется следующим образом: определяют главные параметры, устанавливают дискретный ряд изменения главных параметров, искусственно изменяют входные параметры объекта в пределах установленного дискретного ряда, фиксируют все изменения выходов и статистически обрабатывают полученные результаты.

Динамические характеристики объекта автоматизации определяются рядом его свойств, одни из которых способствуют качественному процессу управления, другие препятствуют ему.
Из всех свойств объектов автоматизации, независимо от их многообразия, можно выделить главные, наиболее характерные: емкость, способность к самовыравниванию и запаздывание.
Емкостью называют способность объекта аккумулировать рабочую среду и запасать ее внутри объекта. Накопление вещества или энергии возможно благодаря тому, что в каждом объекте имеется сопротивление выходу.
Мерой емкости объекта служит коэффициент емкости С, характеризующий количество вещества или энергии, которое нужно подвести к объекту, чтобы изменить управляемую величину на единицу в принятой размерности измерения:
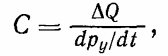
где dQ — разность между притоком и расходом вещества или энергии; ру — управляемый параметр; t — время.
Размерность коэффициента емкости может быть различной в зависимости от размерностей управляемых параметров.
Скорость изменения управляемого параметра тем меньше, чем больше коэффициент емкости объекта. Из этого следует, что легче управляются те объекты, коэффициенты емкости которых больше.
Самовыравнивание — это способность объекта приходить после возмущения в новое установившееся состояние без вмешательства управляющего устройства (регулятора). Объекты, обладающие самовыравниванием, называют статическими, а не обладающие этим свойством — нейтральными или астатическими. Самовыравнивание способствует стабилизации управляющего параметра объекта и облегчает работу управляющего устройства.
Самовыравнивание объектов характеризуется коэффициентом (степенью) самовыравнивания, который имеет вид:
В зависимости от коэффициента самовыравнивания статические характеристики объекта принимают различный вид (рис. 2).
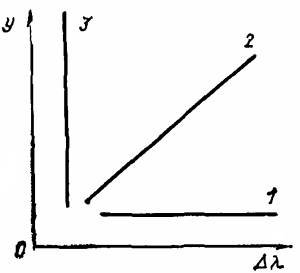
Зависимость управляемого параметра от нагрузки (относительного возмущения) при различных коэффициентах самовыравнивания: 1 — идеальное самовыравнивание; 2 — нормальное самовыравнивание; 3 — отсутствие самовыравнивания
Зависимость 1 характеризует объект, у которого управляемая величина не изменяется при любых возмущениях, такой объект не нуждается в управляющих устройствах. Зависимость 2 отражает нормальное самовыравнивание объекта, зависимость 3 характеризует объект, не имеющий самовыравнивания. Коэффициент р является переменной величиной, он повышается с увеличением нагрузки и в большинстве случаев имеет положительное значение.

Запаздывание — это время, проходящее между моментом нарушения равновесия и началом изменения управляемой величины объекта. Оно обусловливается наличием сопротивлений и инерционностью системы.
Различают два вида запаздывания: чистое (или транспортное) и переходное (или емкостное), которые в сумме составляют общее запаздывание в объекте.
Чистое запаздывание получило свое название потому, что в объектах, где оно имеется, наблюдается смещение во времени реакции на выходе объекта по сравнению с моментом появления входного воздействия без изменения величины и формы воздействия. Минимальным чистым запаздыванием обладает объект, работающий при максимальной нагрузке или в котором сигнал распространяется с большой скоростью.
Переходное запаздывание возникает при преодолении потоком вещества или энергии сопротивлений между емкостями объекта. Оно определяется числом емкостей и величиной переходных сопротивлений.
Чистое и переходное запаздывания ухудшают качество управления, поэтому необходимо стремиться к уменьшению их величин. К мерам, способствующим этому, можно отнести размещение измерительных и управляющих устройств в непосредственной близости от объекта, применение малоинерционных чувствительных элементов, конструктивная рационализация самого объекта и др.
Результаты анализа наиболее важных характеристик и свойств объектов автоматизации, а также методов их изучения позволяют сформулировать ряд требований и условий, выполнение которых обеспечивает возможность успешной автоматизации. Главные из них следующие:
- математическое описание связей объекта, представленное в виде статических характеристик; для сложных объектов, которые не могут быть описаны математически, — использование математико-статистических, табличных, пространственных и других методов изучения связей объекта, основанных на введении некоторых допущений;
- построение динамических характеристик объекта в виде дифференциальных уравнений или графиков для изучения переходных процессов в объекте, при этом учитывают все основные свойства объекта (емкость, запаздывание, самовыравнивание);
- использование в объекте таких технических средств, которые бы обеспечивали выдачу информации об изменении всех интересующих параметров объекта в виде унифицированных сигналов, измеряемых датчиками;
- применение для управления объектом исполнительных механизмов, имеющих управляемые приводы;
- установление достоверно известных пределов изменения внешних возмущений объекта.
К подчиненным требованиям можно отнести:
- определение граничных условий автоматизации в соответствии с задачами управления;
- установление ограничений входных величин и управляющих воздействий;
- расчет критериев оптимальности (эффективности).

Пример объекта автоматизации — установка приготовления формовочных смесей в литейном производстве
Процесс приготовления формовочных смесей состоит из дозирования исходных компонентов, подачи их в смеситель, смешивания готовой смеси и выдачи ее к формовочным линиям, обработки и регенерации отработанной смеси.
Исходные материалы наиболее распространенных в литейном производстве песчано-глинистых смесей: отработанная смесь, свежий песок (наполнитель), глина или бентонит (связующая добавка), молотый уголь или углеродсодержащие материалы (противопригарная добавка), огнеупорные и специальные добавки (крахмалит, мелясса), а также вода.
Входными параметрами процесса смесеприготовления являются расходы указанных формовочных материалов: отработанная смесь, свежий песок, глина или бентонит, молотый уголь, крахмалит или другие добавки, вода.
Выходными параметрами являются требуемые механические и технологические свойства формовочной смеси: прочность в сухом и во влажном состоянии, газопроницаемость, уплотняемость, формуемость, текучесть, объемная масса и др., которые контролируются с помощью лабораторного анализа.
Кроме того, к выходным параметрам относится также компонентный состав смеси: содержание активного и эффективного связующих, содержание активного угля, влажность или степень увлажнения связующего, содержание мелочи — влагопоглощающих мелких частиц и гранулометрический состав смеси или модуль мелкости.
Таким образом, объектом управления процесса является компонентный состав смеси. Обеспечением оптимального состава компонентов готовой смеси, определенного экспериментально, можно добиться стабилизации на заданном уровне механических и технологических свойств смеси.
Возмущения, которым подвержена смесеприготовительная система, значительно усложняют задачу стабилизации качества смеси. Причиной возмущений является наличие потока рециркуляции — использование отработанной смеси. Основное возмущение на систему смесеприготовления оказывают процессы заливки. Под воздействием жидкого металла у части смеси, прилегающей к отливке и прогреваемой до высоких температур, происходят глубокие изменения состава активного связующего, угля и крахмалита и переход их в неактивный компонент.
Приготовление смеси состоит их двух последовательных процессов: дозирования, или шихтовки смеси, обеспечивающей получение требуемого компонентного состава, и смешивания, обеспечивающего получение однородной смеси и придание ей необходимых технологических свойств.
В современном технологическом процессе приготовления формовочных смесей применяют непрерывные методы дозирования сырьевых (формовочных) материалов, задача которых — выдача неразрывным потоком постоянного количества материала или отдельных его компонентов с отклонениями расхода от заданного не больше допустимых.
Автоматизация процесса смесеприготовления как объекта управления может быть осуществлена при следующем:
- рациональном построении смесеприготовительных систем, позволяющих исключить или уменьшить влияние возмущений на состав смеси;
- использовании весовых методов дозирования;
- создании связанных систем управления многокомпонентным дозированием с учетом динамики процесса (инерционности смесителя и запаздывания), причем ведущим компонентом должна быть отработанная смесь, имеющая значительные колебания расхода и состава;
- автоматическом контроле и регулировании качества смеси в процессе ее приготовления;
- создании автоматических приборов для комплексного контроля состава и свойств смеси с обработкой результатов контроля на ЭВМ;
- своевременном изменении рецептуры смеси при изменении соотношения смесь/металл в форме и времени охлаждения отливки до выбивки.
Присоединяйтесь к нашему каналу в Telegram «Автоматика и робототехника»! Узнавайте первыми о захватывающих новостях и увлекательных фактах из мира автоматизации: Автоматика и робототехника в Telegram