Transfer Fcn
Блок Transfer Fcn моделирует линейную систему передаточной функцией переменной s Лапласа доменной . Блок может смоделировать одно вход одно выход (SISO) и одно вход, несколько — выводят системы (SIMO).
Условия для Использования этого блока
Блок Transfer Fcn принимает следующие условия:
- Передаточная функция имеет форму
H ( s ) = y ( s ) u ( s ) = n u m ( s ) d e n ( s ) = n u m ( 1 ) s n n − 1 + n u m ( 2 ) s n n − 2 + … + n u m ( n n ) d e n ( 1 ) s n d − 1 + d e n ( 2 ) s n d − 2 + … + d e n ( n d ) ,
Моделирование системы Одно Выхода
Для системы одно выхода ввод и вывод блока является скалярными сигналами временной области. Смоделировать эту систему:
- Введите вектор для коэффициентов числителя передаточной функции в поле Numerator coefficients.
- Введите вектор для коэффициентов знаменателя передаточной функции в поле Denominator coefficients.
Моделирование нескольких — Выходная система
Для нескольких — выходная система, вход блока является скаляром, и выход является вектором, где каждым элементом является выход системы. Смоделировать эту систему:
- Введите матрицу в поле Numerator coefficients. Каждая строка этой матрицы содержит коэффициенты числителя передаточной функции, которая определяет один из блока выходные параметры.
- Введите вектор из коэффициентов знаменателя, характерных для всех передаточных функций системы в поле Denominator coefficients.
Определение начальных условий
Передаточная функция описывает отношение между вводом и выводом в Лапласе (частота) область. А именно, это задано как Преобразование Лапласа ответа (выход) системы с нулевыми начальными условиями к импульсному входу.
Операции как умножение и деление передаточных функций используют нулевое начальное состояние. Например, можно разложить одну сложную передаточную функцию на серию более простых передаточных функций. Примените их последовательно, чтобы получить ответ, эквивалентный той из исходной передаточной функции. Это не будет правильно, если одна из передаточных функций примет ненулевое начальное состояние. Кроме того, передаточная функция имеет бесконечно реализацию области многого времени, большинство чей состояния не имеют никакого физического смысла.
По этим причинам, Simulink ® задает начальные условия блока Transfer Fcn , чтобы обнулить. Чтобы задать начальные условия для данной передаточной функции, преобразуйте передаточную функцию в ее управляемую, каноническую реализацию пространства состояний с помощью tf2ss . Затем используйте блок State-Space . tf2ss утилита обеспечивает A B C , и D матрицы для системы.
Для получения дополнительной информации введите help tf2ss или см. документацию Control System Toolbox™.
Отображение передаточной функции на блоке
Блок Transfer Fcn отображает передаточную функцию в зависимости от того, как вы задаете параметры знаменателя и числитель.
- Если вы задаете каждый параметр как выражение или вектор, блок показывает передаточную функцию с заданными коэффициентами и степенями s . Если вы задаете переменную в круглых скобках, блок оценивает переменную. Например, если вы задаете Numerator coefficients как [3,2,1] и Denominator coefficients как (den) , где den [7,5,3,1] , блок выглядит так:
Выборка и редактирование универсального блока Transfer Fcn
Программа Simulink является приложением к пакету MATLAB. При моделировании с использованием Simulink реализуется принцип визуального программирования, в соответствии с которым, пользователь на экране из библиотеки стандартных блоков создает модель устройства и осуществляет расчеты. При этом, в отличие от классических способов моделирования, пользователю не нужно досконально изучать язык программирования и численные методы математики, а достаточно общих знаний требующихся при работе на компьютере и, естественно, знаний той предметной области в которой он работает.
Simulink является достаточно самостоятельным инструментом MATLAB и при работе с ним совсем не требуется знать сам MATLAB и остальные его приложения. С другой стороны доступ к функциям MATLAB и другим его инструментам остается открытым и их можно использовать в Simulink. Часть входящих в состав пакетов имеет инструменты, встраиваемые в Simulink (например, LTI-Viewer приложения Control System Toolbox – пакета для разработки систем управления). Имеются также дополнительные библиотеки блоков для разных областей применения (например, Power System Blockset – моделирование электротехнических устройств, Digital Signal Processing Blockset – набор блоков для разработки цифровых устройств и т.д).
При работе с Simulink пользователь имеет возможность модернизировать библиотечные блоки, создавать свои собственные, а также составлять новые библиотеки блоков.
При моделировании пользователь может выбирать метод решения дифференциальных уравнений, а также способ изменения модельного времени (с фиксированным или переменным шагом). В ходе моделирования имеется возможность следить за процессами, происходящими в системе. Для этого используются специальные устройства наблюдения, входящие в состав библиотеки Simulink. Результаты моделирования могут быть представлены в виде графиков или таблиц.
Для запуска программы необходимо предварительно запустить пакет MATLAB. Основное окно пакета MATLAB показано на рис. 1.2. Там же показана подсказка появляющаяся в окне при наведении указателя мыши на ярлык Simulink в панели инструментов.
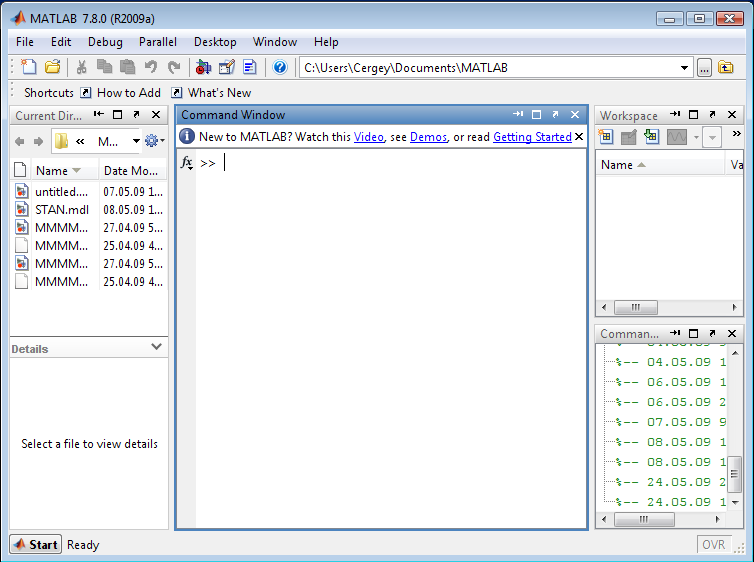
Рис. 1.2. Основное окно программы MATLAB
После открытия основного окна программы MATLAB нужно запустить программу Simulink. Это можно сделать одним из трех способов (рис. 1.3):
- Нажать кнопку
 (Simulink)на панели инструментов командного окна MATLAB.
(Simulink)на панели инструментов командного окна MATLAB. - В командной строке главного окна MATLAB напечатать Simulink и нажать клавишу Enter на клавиатуре.
- В меню File открыть вкладку New — Model.
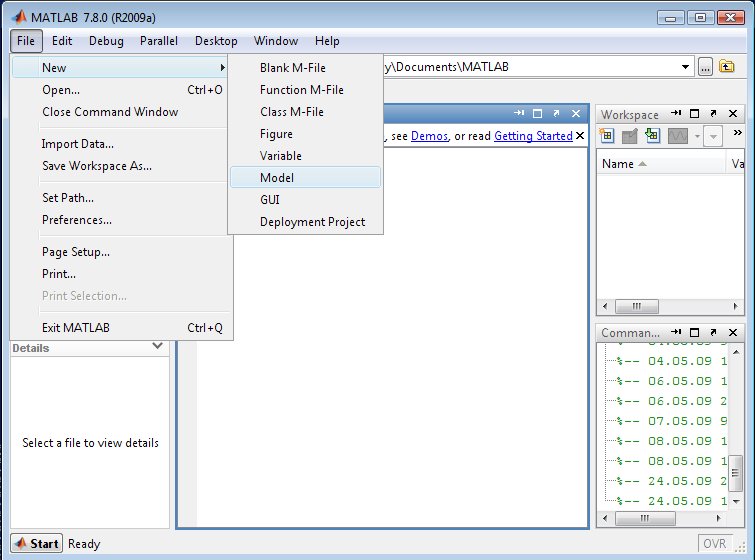 Рис. 1.3. Основное окно программы MATLAB
Рис. 1.3. Основное окно программы MATLAB 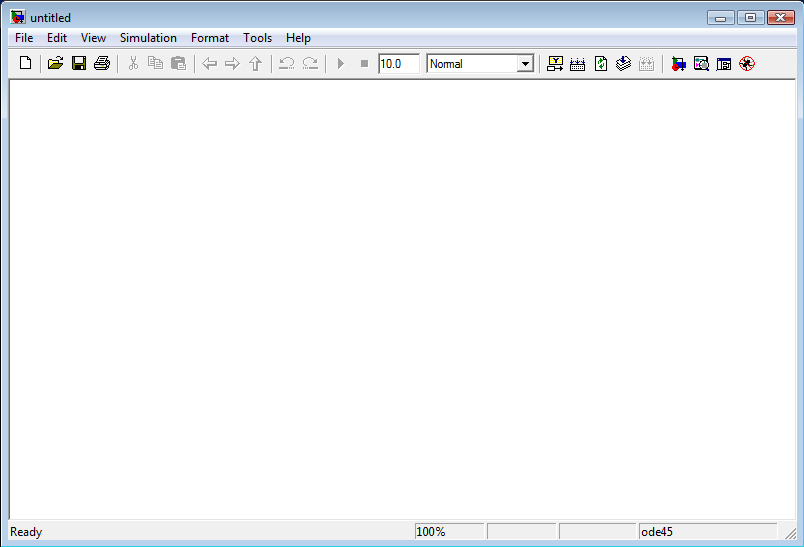 Рис. 1.4. Окно рабочей области Появившееся окно – окно рабочей области, в которой можно собирать структурные схемы динамических систем. Все динамические блоки находятся в библиотеке, которая открывается нажатием клавиши
Рис. 1.4. Окно рабочей области Появившееся окно – окно рабочей области, в которой можно собирать структурные схемы динамических систем. Все динамические блоки находятся в библиотеке, которая открывается нажатием клавиши  на панели окна рабочей области (рис. 1.5).
на панели окна рабочей области (рис. 1.5).  Рис. 1.5. Библиотека MATLAB Выбрать и расположить в окне необходимые для модели блоки можно указав курсором на требуемый блок в выбранном разделе (например Continuous–TransferFcn) и нажав на левую клавишу “мыши” — “перетащить” блок в созданное окно (рис. 1.6). Клавишу мыши нужно держать нажатой. Выбранный блок является универсальным и в него можно записать передаточную функцию любого известного и ТАУ динамического звена, любого порядка.
Рис. 1.5. Библиотека MATLAB Выбрать и расположить в окне необходимые для модели блоки можно указав курсором на требуемый блок в выбранном разделе (например Continuous–TransferFcn) и нажав на левую клавишу “мыши” — “перетащить” блок в созданное окно (рис. 1.6). Клавишу мыши нужно держать нажатой. Выбранный блок является универсальным и в него можно записать передаточную функцию любого известного и ТАУ динамического звена, любого порядка.  Рис. 1.6. Выборка блоков библиотеки MATLAB Например, необходимо реализовать апериодическое звено первого порядка с передаточной функцией
Рис. 1.6. Выборка блоков библиотеки MATLAB Например, необходимо реализовать апериодическое звено первого порядка с передаточной функцией  . Для этого нужно дважды щелкнуть мышью блок TransferFcn в рабочем окне (рис. 1.7).
. Для этого нужно дважды щелкнуть мышью блок TransferFcn в рабочем окне (рис. 1.7). 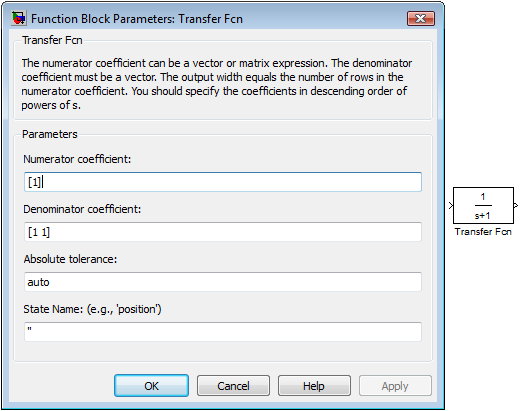 Рис. 1.7. Функциональное окно блока TransferFcn В появившемся функциональном окне в строке Numeratorcoefficient в квадратных скобках через пробел указываются коэффициенты полинома числителя передаточной функции, а в строке Denominatorcoefficient коэффициенты полинома числителя. В данном случае для выбранного апериодического звена заполненный функциональный блок представлен на рис. 1.8.
Рис. 1.7. Функциональное окно блока TransferFcn В появившемся функциональном окне в строке Numeratorcoefficient в квадратных скобках через пробел указываются коэффициенты полинома числителя передаточной функции, а в строке Denominatorcoefficient коэффициенты полинома числителя. В данном случае для выбранного апериодического звена заполненный функциональный блок представлен на рис. 1.8. 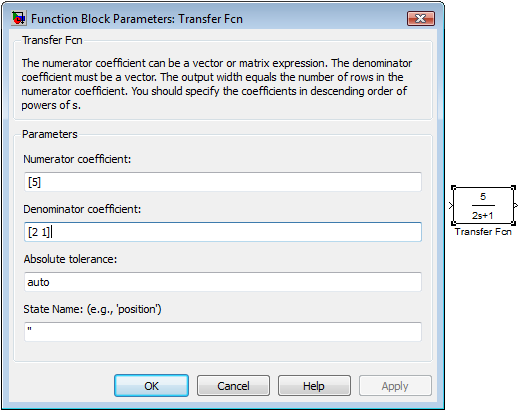 Рис. 1.8. Функциональное окно блока TransferFcn Для удаления блока необходимо выбрать блок (указать курсором на его изображение и нажать левую клавишу “мыши”), а затем нажать клавишу Delete на клавиатуре. Любая динамическая система предполагает исследования её с помощью управляющих и возмущающих воздействий. Изменяющийся во времени сигнал любой формы можно получить с помощью универсального блока построения сигналовSignalBuilder, который находится в списке библиотекиSimulink–Sources. Для снятия переходных процессов в средеMatLabможно воспользоваться многофункциональным осциллографом (списокSinks—Scope). В осциллограф можно завести несколько сигналов с помощью блокаMuxв спискеCommonly Used Blocks (рис. 1.9). Соединение двух блоков (вход — выход) осуществляется удерживанием и соединением входа с выходом левой кнопкой мыши. При подведении мыши ко входу курсор меняет форму на крест.
Рис. 1.8. Функциональное окно блока TransferFcn Для удаления блока необходимо выбрать блок (указать курсором на его изображение и нажать левую клавишу “мыши”), а затем нажать клавишу Delete на клавиатуре. Любая динамическая система предполагает исследования её с помощью управляющих и возмущающих воздействий. Изменяющийся во времени сигнал любой формы можно получить с помощью универсального блока построения сигналовSignalBuilder, который находится в списке библиотекиSimulink–Sources. Для снятия переходных процессов в средеMatLabможно воспользоваться многофункциональным осциллографом (списокSinks—Scope). В осциллограф можно завести несколько сигналов с помощью блокаMuxв спискеCommonly Used Blocks (рис. 1.9). Соединение двух блоков (вход — выход) осуществляется удерживанием и соединением входа с выходом левой кнопкой мыши. При подведении мыши ко входу курсор меняет форму на крест.  Рис. 1.9. Выборка блокаMuxБлок построения сигналовSignalBuilderПостроение сигнала любой формы осуществляется в специальной области. Область построения сигнала появляется при двойном щелчке по блокуSignalBuilderв рабочем окне (рис. 1.10).В окне построения сигналов красным цветом показан ломаный сигнал в масштабе времени. За угол излома можно ухватиться мышью и изменить его форму. Также есть возможность изменять уровень сигнала по амплитуде. Для этого необходимо щелкнуть мышью на угол сигнала, точка угла выделится красным кругом. Внизу окна (LeftPoint,RightPoint) можно вручную изменить координаты этой точки. Если не хватает точек для построения нужного сигнала, то можно добавить необходимое количество точек, щелкнув в нужное место правой кнопкой мыши, удерживая клавишуShift(рис. 1.11).
Рис. 1.9. Выборка блокаMuxБлок построения сигналовSignalBuilderПостроение сигнала любой формы осуществляется в специальной области. Область построения сигнала появляется при двойном щелчке по блокуSignalBuilderв рабочем окне (рис. 1.10).В окне построения сигналов красным цветом показан ломаный сигнал в масштабе времени. За угол излома можно ухватиться мышью и изменить его форму. Также есть возможность изменять уровень сигнала по амплитуде. Для этого необходимо щелкнуть мышью на угол сигнала, точка угла выделится красным кругом. Внизу окна (LeftPoint,RightPoint) можно вручную изменить координаты этой точки. Если не хватает точек для построения нужного сигнала, то можно добавить необходимое количество точек, щелкнув в нужное место правой кнопкой мыши, удерживая клавишуShift(рис. 1.11). Рис.1.10. Окно построения сигналаSignalBuilder
Рис.1.10. Окно построения сигналаSignalBuilder Рис.1.11. Окно построения сигнала Для того, чтобы открыть окно просмотра сигналов необходимо выполнить двойной щелчок левой клавишей “мыши” на изображении блока Scope, появится окно осциллографа (рис. 1.12). Это можно сделать на любом этапе расчета (как до начала расчета, так и после него, а также во время расчета). В том случае, если на вход блока поступает векторный сигнал, то кривая для каждого элемента вектора строится отдельным цветом.
Рис.1.11. Окно построения сигнала Для того, чтобы открыть окно просмотра сигналов необходимо выполнить двойной щелчок левой клавишей “мыши” на изображении блока Scope, появится окно осциллографа (рис. 1.12). Это можно сделать на любом этапе расчета (как до начала расчета, так и после него, а также во время расчета). В том случае, если на вход блока поступает векторный сигнал, то кривая для каждого элемента вектора строится отдельным цветом.  Рис. 1.12. Окно осциллографа Настройка окна осциллографа выполняется с помощью панелей инструментов (рис. 1.13).
Рис. 1.12. Окно осциллографа Настройка окна осциллографа выполняется с помощью панелей инструментов (рис. 1.13).  Рис. 1.13. Панель инструментов блока Scope Панель инструментов содержит 11 кнопок:
Рис. 1.13. Панель инструментов блока Scope Панель инструментов содержит 11 кнопок:
- Print – печать содержимого окна осциллографа.
- Parameters – доступ к окну настройки параметров.
- Zoom – увеличение масштаба по обеим осям.
- Zoom X-axis – увеличение масштаба по горизонтальной оси.
- Zoom Y-axis – увеличение масштаба по вертикальной оси.
- Autoscale – автоматическая установка масштабов по обеим осям.
- Save current axes settings – сохранение текущих настроек окна.
- Restore saved axes settings – установка ранее сохраненных настроек окна.
- Floating scope – перевод осциллографа в “свободный” режим.
- Lock/Unlock axes selection – закрепить/разорвать связь между текущей координатной системой окна и отображаемым сигналом. Инструмент доступен, если включен режим Floating scope.
- Signal selection – выбор сигналов для отображения. Инструмент доступен, если включен режим Floating scope.
Изменение масштабов отображаемых графиков можно выполнять несколькими способами: 1. Нажать соответствующую кнопку ( ,
, или
или ) и щелкнуть один раз левой клавишей “мыши” в нужном месте графика. Произойдет 2,5 кратное увеличение масштаба. 2. Нажать соответствующую кнопку (
) и щелкнуть один раз левой клавишей “мыши” в нужном месте графика. Произойдет 2,5 кратное увеличение масштаба. 2. Нажать соответствующую кнопку ( ,
, или
или ) и, нажав левую клавишу “мыши”, с помощью динамической рамки или отрезка указать область графика для увеличенного изображения. На рис. 1.14 изображено окно просмотра сигналов осциллографа.
) и, нажав левую клавишу “мыши”, с помощью динамической рамки или отрезка указать область графика для увеличенного изображения. На рис. 1.14 изображено окно просмотра сигналов осциллографа. 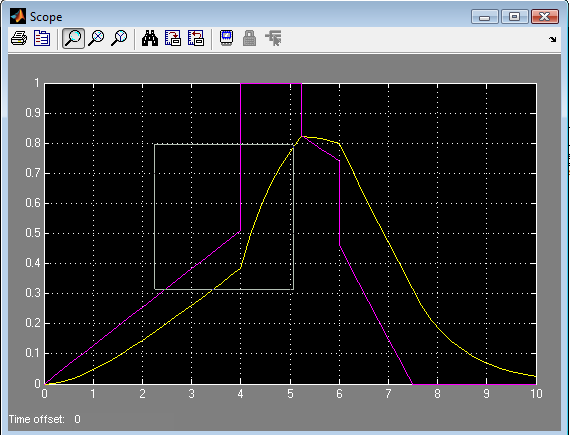 Рис. 1.14. Окно просмотра сигналов осциллографа 3. Щелкнуть правой клавишей “мыши” в окне графиков и, выбрать команду Axes properties… в контекстном меню. Откроется окно свойств графика, в котором с помощью параметров Y-min и Y-max можно указать предельные значения вертикальной оси. В этом же окне можно указать заголовок графика (Title), заменив выражение % в строке ввода. Окно свойств показано на рис. 1.15.
Рис. 1.14. Окно просмотра сигналов осциллографа 3. Щелкнуть правой клавишей “мыши” в окне графиков и, выбрать команду Axes properties… в контекстном меню. Откроется окно свойств графика, в котором с помощью параметров Y-min и Y-max можно указать предельные значения вертикальной оси. В этом же окне можно указать заголовок графика (Title), заменив выражение % в строке ввода. Окно свойств показано на рис. 1.15. 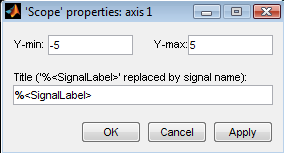 Рис. 1.15. Окно свойств графика Параметры: Параметры блока устанавливаются в окне ‘Scope’ parameters, которое открывается с помощью инструмента
Рис. 1.15. Окно свойств графика Параметры: Параметры блока устанавливаются в окне ‘Scope’ parameters, которое открывается с помощью инструмента  (Parameters) панели инструментов. Окно параметров имеет две вкладки: General – общие параметры. Data history – параметры сохранения сигналов в рабочей области MATLAB (рис. 1.16).
(Parameters) панели инструментов. Окно параметров имеет две вкладки: General – общие параметры. Data history – параметры сохранения сигналов в рабочей области MATLAB (рис. 1.16).  Рис. 1.16. Окно свойств осциллографаВо вкладкеLimitdatapointstolastможно указать нужное количество точек осциллографа. Если точек не будет хватать для построения всех переходных процессов, то графики будут «урезаны» во временном диапазоне.Выбор метода счетаДля различных структурных схем применяются различные методы счета. Если структурная схема состоит из динамических звеньев, то удобен метод Рунге-Кутта с фиксированным шагом счета.Для его установки в окне рабочей области нужно щелкнуть менюSimulation/Configuration.В строкеSimulationtimeвыставляются время начала и время конца счета. В разделеSolveroptionsвыставляется метод счетаSolver:ode4 (Runge—Kutta), тип счетаType:Fixed—step. ВстрокеFixed-step size (fundamental sample time)выставляетсяшагсчета.Окно настроек метода счета представлен на рис. 1.17.
Рис. 1.16. Окно свойств осциллографаВо вкладкеLimitdatapointstolastможно указать нужное количество точек осциллографа. Если точек не будет хватать для построения всех переходных процессов, то графики будут «урезаны» во временном диапазоне.Выбор метода счетаДля различных структурных схем применяются различные методы счета. Если структурная схема состоит из динамических звеньев, то удобен метод Рунге-Кутта с фиксированным шагом счета.Для его установки в окне рабочей области нужно щелкнуть менюSimulation/Configuration.В строкеSimulationtimeвыставляются время начала и время конца счета. В разделеSolveroptionsвыставляется метод счетаSolver:ode4 (Runge—Kutta), тип счетаType:Fixed—step. ВстрокеFixed-step size (fundamental sample time)выставляетсяшагсчета.Окно настроек метода счета представлен на рис. 1.17.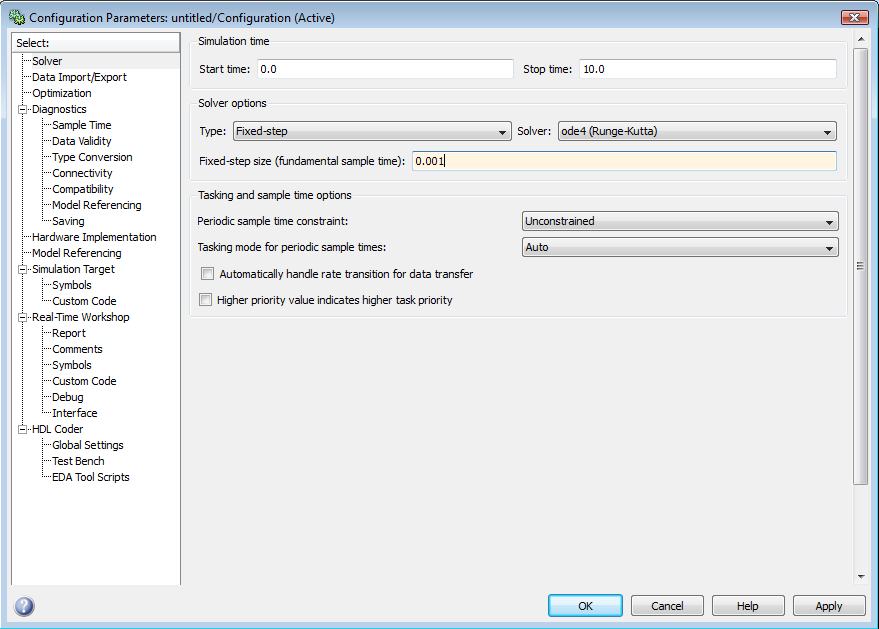 Рис. 1.17. Окно конфигурацииСнятие частотной характеристики звена илидинамической системы вMatLabПусть необходимо снять логарифмическую амплитудную и фазовую частотную характеристики (ЛАЧХ и ЛФЧХ) инерционного звена с передаточной функцией
Рис. 1.17. Окно конфигурацииСнятие частотной характеристики звена илидинамической системы вMatLabПусть необходимо снять логарифмическую амплитудную и фазовую частотную характеристики (ЛАЧХ и ЛФЧХ) инерционного звена с передаточной функцией  , (рис. 1.18).
, (рис. 1.18).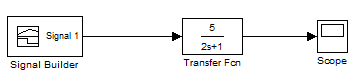 Рис. 1.18. Инерционное звеноСначала нужно установить точки входа (Inputpoint) и выхода (Outputpoint) для снятия частотной характеристики. Для этого необходимо щелкнуть правой кнопкой мыши на линию входа в блок и выбратьLinearizationPoints/InputРoint, (рис. 1.19).
Рис. 1.18. Инерционное звеноСначала нужно установить точки входа (Inputpoint) и выхода (Outputpoint) для снятия частотной характеристики. Для этого необходимо щелкнуть правой кнопкой мыши на линию входа в блок и выбратьLinearizationPoints/InputРoint, (рис. 1.19).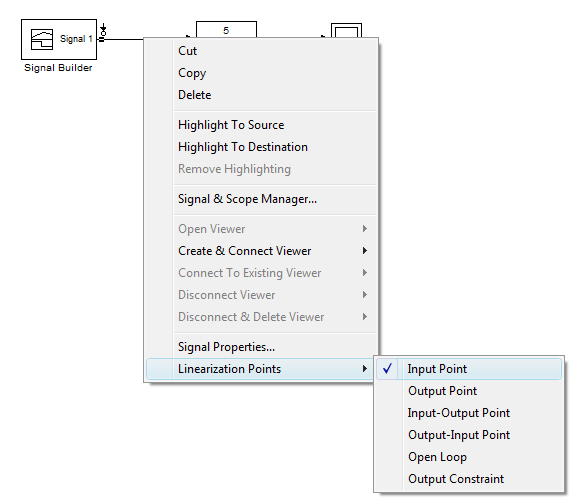 Рис. 1.19. Установка точки входаЗатем необходимо установить точку выхода частотной характеристики, щелкнув правой кнопкой на соединительную линию выхода инерционного звена и выбравLinearizationPoints/OutputPoint,(рис.1.20).
Рис. 1.19. Установка точки входаЗатем необходимо установить точку выхода частотной характеристики, щелкнув правой кнопкой на соединительную линию выхода инерционного звена и выбравLinearizationPoints/OutputPoint,(рис.1.20).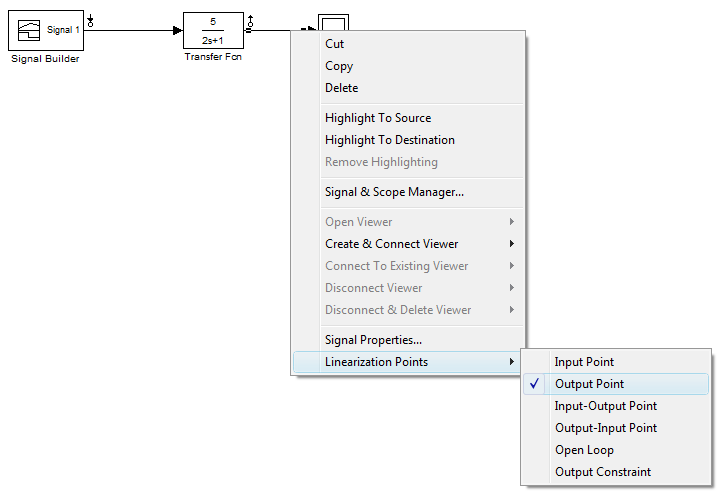 Рис. 1.20. Установка точки выходаНа пиктограмме структурной схемы должны появиться стрелки точек входа и выхода (рис. 1.20).Далее в меню рабочего окнаToolsнужно выбрать вкладкуControlDesign/LinearAnalysis, рис. 1.21.В появившемся окнеСontrolandEstimationToolsManagerнеобходимо установить тип осциллографаBoderesponseplot.Данного типа осциллограф является логарифмическим и показывает амплитудную и фазовую характеристики, рис. 1.22.
Рис. 1.20. Установка точки выходаНа пиктограмме структурной схемы должны появиться стрелки точек входа и выхода (рис. 1.20).Далее в меню рабочего окнаToolsнужно выбрать вкладкуControlDesign/LinearAnalysis, рис. 1.21.В появившемся окнеСontrolandEstimationToolsManagerнеобходимо установить тип осциллографаBoderesponseplot.Данного типа осциллограф является логарифмическим и показывает амплитудную и фазовую характеристики, рис. 1.22.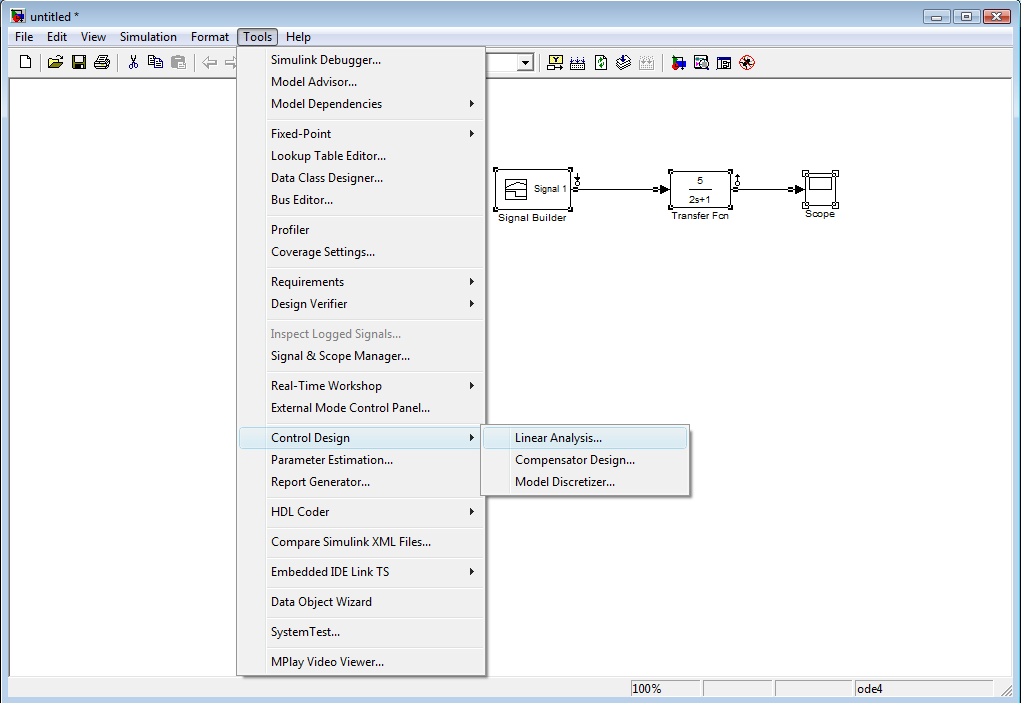 Рис. 1.21. Открытие окна частотного анализа
Рис. 1.21. Открытие окна частотного анализа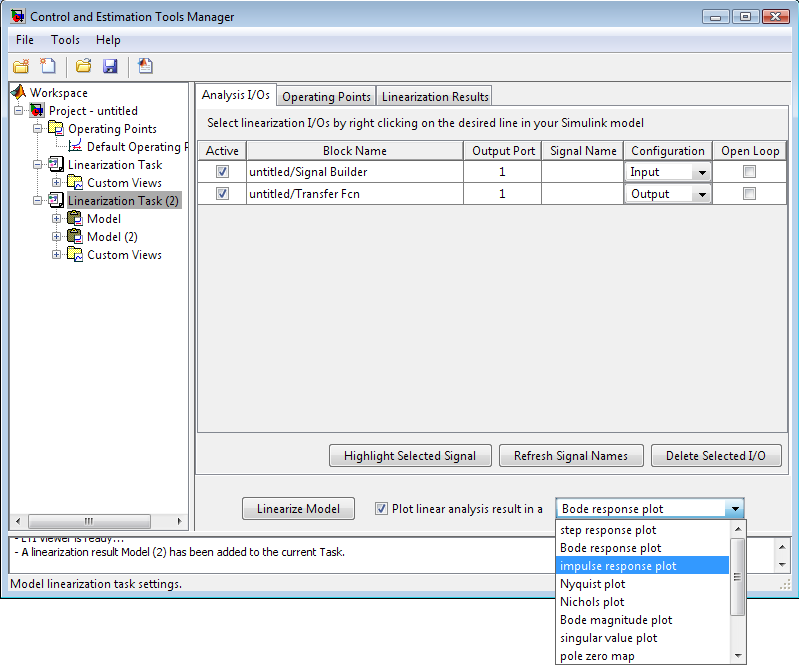 Рис. 1.22.ОкносвойствчастотногоанализаДалеевокнеСontrol and Estimation Tools ManagerнужнонажатькнопкуLinearize Model.ПоявитсяокносЛАЧХиЛФЧХинерционногозвена, (рис. 1.23).
Рис. 1.22.ОкносвойствчастотногоанализаДалеевокнеСontrol and Estimation Tools ManagerнужнонажатькнопкуLinearize Model.ПоявитсяокносЛАЧХиЛФЧХинерционногозвена, (рис. 1.23).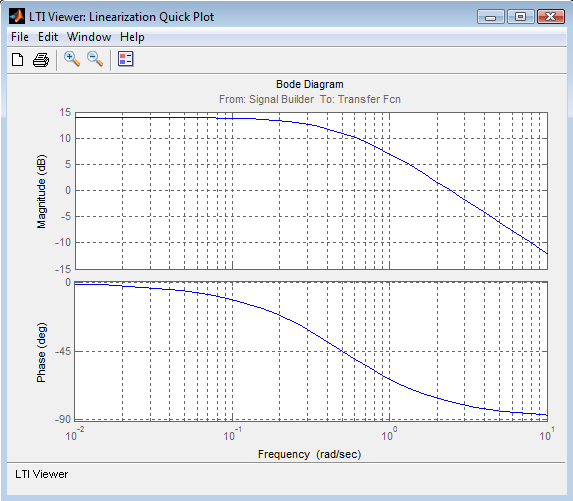 Рис. 1.23. Окно просмотра частотных характеристик
Рис. 1.23. Окно просмотра частотных характеристик
Transfer Fcn
Блок Transfer Fcn моделирует линейную систему передаточной функцией переменной Laplace-domain s . Блок может моделировать системы single-input single-output (SISO) и single-input multiple-output (SIMO).
Условия использования этого блока
Блок Transfer Fcn принимает следующие условия:
- Передаточная функция имеет вид
H ( s ) = y ( s ) u ( s ) = n u m ( s ) d e n ( s ) = n u m ( 1 ) s n n − 1 + n u m ( 2 ) s n n − 2 + … + n u m ( n n ) d e n ( 1 ) s n d − 1 + d e n ( 2 ) s n d − 2 + … + d e n ( n d ) ,
Моделирование системы с одним выходом
Для системы с одним выходом входные и выходные параметры блока являются скалярными сигналами временной области. Чтобы смоделировать эту систему:
- Введите вектор для коэффициентов числителя передаточной функции в поле Numerator coefficients.
- Введите вектор коэффициентов знаменателя передаточной функции в поле Denominator coefficients.
Моделирование системы с несколькими выходами
Для системы с несколькими выходами блочный вход является скаляром, а выходной — вектором, где каждый элемент является выходом системы. Чтобы смоделировать эту систему:
- Введите матрицу в поле Numerator coefficients. Каждая строка этой матрицы содержит коэффициенты числителя передаточной функции, которая определяет один из выходов блока.
- Введите вектор коэффициентов знаменателя, общих для всех передаточных функций системы, в поле Denominator coefficients.
Определение начальных условий
Передаточная функция описывает отношение между входом и выходом в области Лапласа (частота). В частности, это определяется как преобразование Лапласа отклика (выхода) системы с нулевыми начальными условиями на импульсный вход.
Операции, такие как умножение и деление передаточных функций, зависят от нулевого начального состояния. Например, можно разложить одну сложную передаточную функцию на серию более простых передаточных функций. Примените их последовательно, чтобы получить ответ, эквивалентный ответу исходной передаточной функции. Это будет неправильно, если одна из передаточных функций принимает ненулевое начальное состояние. Кроме того, передаточная функция имеет бесконечно много реализаций во временном интервале, большинство состояний которых не имеют никакого физического смысла.
По этим причинам Simulink ® задает нулевые начальные условия блока Transfer Fcn . Чтобы задать начальные условия для заданной передаточной функции, преобразуйте передаточную функцию в ее управляемую, каноническую реализацию в пространстве состояний с помощью tf2ss . Затем используйте блок State-Space . The tf2ss утилита обеспечивает A , B , C , и D матрицы для системы.
Для получения дополнительной информации введите help tf2ss или см. документацию по Control System Toolbox™.
Отображение передаточной функции на блоке
Блок Transfer Fcn отображает передаточную функцию в зависимости от того, как вы задаете параметры числителя и знаменателя.
- Если вы задаете каждый параметр как выражение или вектор, блок показывает передаточную функцию с заданными коэффициентами и степенями s . Если вы задаете переменную в круглых скобках, блок оценивает переменную. Для примера, если вы задаете Numerator coefficients как [3,2,1] и Denominator coefficients как (den) , где den является [7,5,3,1] , блок выглядит следующим образом:
Передайте Fcn
![]()
Блок Transfer Fcn моделирует линейную систему передаточной функцией переменной s Лапласа доменной. Блок может смоделировать одно вход одно вывод (SISO) и одно вход, несколько — выводят системы (SIMO).
Условия для Использования этого блока
Блок Transfer Fcn принимает следующие условия:
- Передаточная функция имеет форму
H ( s ) = y ( s ) u ( s ) = n u m ( s ) d e n ( s ) = n u m ( 1 ) s n n − 1 + n u m ( 2 ) s n n − 2 + … + n u m ( n n ) d e n ( 1 ) s n d − 1 + d e n ( 2 ) s n d − 2 + … + d e n ( n d ) ,
Моделирование системы Одно Вывода
Для системы одно вывода ввод и вывод блока является скалярными сигналами временного интервала. Смоделировать эту систему:
- Введите вектор для коэффициентов числителя передаточной функции в поле Numerator coefficients.
- Введите вектор для коэффициентов знаменателя передаточной функции в поле Denominator coefficients.
Моделирование нескольких — Выходная система
Для нескольких — выходная система, вход блока является скаляром, и вывод является вектором, где каждым элементом является вывод системы. Смоделировать эту систему:
- Введите матрицу в поле Numerator coefficients. Каждая строка этой матрицы содержит коэффициенты числителя передаточной функции, которая определяет один из блока выходные параметры.
- Введите вектор коэффициентов знаменателя, характерных для всех передаточных функций системы в поле Denominator coefficients.
Определение начальных условий
Передаточная функция описывает отношение между вводом и выводом в Лапласе (частота) область. А именно, это задано как Преобразование Лапласа ответа (вывод) системы с нулевыми начальными условиями к импульсному входу.
Операции как умножение и деление передаточных функций полагаются на нулевое начальное состояние. Например, можно разложить одну сложную передаточную функцию на серию более простых передаточных функций. Примените их последовательно, чтобы получить ответ, эквивалентный той из исходной передаточной функции. Это не будет правильно, если одна из передаточных функций примет ненулевое начальное состояние. Кроме того, передаточная функция имеет бесконечно реализацию области многого времени, большинство чей состояния не имеют никакого физического смысла.
По этим причинам Simulink ® задает начальные условия блока Transfer Fcn , чтобы обнулить. Чтобы задать начальные условия для данной передаточной функции, преобразуйте передаточную функцию в ее управляемую, каноническую реализацию пространства состояний с помощью tf2ss . Затем используйте блок State-Space . Утилита tf2ss обеспечивает A , B , C и матрицы D для системы.
Для получения дополнительной информации введите help tf2ss или см. документацию Control System Toolbox™.
Отображение передаточной функции на блоке
Блок Transfer Fcn отображает передаточную функцию в зависимости от того, как вы задаете параметры знаменателя и числитель.
- Если вы задаете каждый параметр как выражение или вектор, блок показывает передаточную функцию с заданными коэффициентами и степенями s . Если вы задаете переменную в круглых скобках, блок оценивает переменную. Например, если вы задаете Numerator coefficients как [3,2,1] и Denominator coefficients как (den) , где den является [7,5,3,1] , блок выглядит так: