Для чего роботу нужен контроллер
Что такое контроллер, и с чем его едят? Автор:
Опубликовано 01.01.1970
- процессор
- оперативная память — ОЗУ
- постоянная память — ПЗУ
- генератор тактовой частоты
- таймеры
- порты ввода/вывода
- последовательные интерфейсы
- и много чего еще.
Например, в более «навороченных» контроллерах может быть АЦП (аналого-цифровой преобразователь), ЦАП (наоборот) и прочие прибамбасы. Чего только ни придумают! Но мы с вами, для начала, рассмотрим более простой вариант. Для примера возьмем контроллер фирмы Atmel, AT90s2313.
Чтобы понять, как работает контроллер, надо знать, что у него внутри. Ниже я нарисовал как мог сильно упрощенную схему контроллера – без таймеров, генераторов и прочей фигни – все только самое необходимое.
Самый главный элемент любого процессора – арифметико-логический узел (АЛУ). Кстати, по буржуйски он называется так-же – ALU (ariphmetic-logical unit). В нем-то, как вы уже догадались, и происходят все мыслимые и немыслимые арифметические и логические операции над числами. Кстати, насчет чисел: контроллер, как и любая другая цифровая система, работает с двоичными числами. О том, что это такое, я подробно распинался в статье «Что такое digital».
Тот контроллер, который мы сейчас мучаем, работает с 8-разрядными двоичными числами, иными словами – он 8-битный. То есть, АЛУ может захавать два 8-битных слова, произвести над ними какую то арифметическую или логическую операцию, и выплюнуть ответ – опять же, 8-битное слово.
Вопрос: а какие бывают арифметические и логические операции? И че эт ваще такое?
Ну, арифметическим операциям нас всех учили еще в 1 классе – это сложение, вычитание, сравнение 🙂
Логические операции – это операции алгебры логики. Вот некоторые из них: «И», «ИЛИ», «НЕ», «исключающее ИЛИ», сдвиг влево, сдвиг вправо.
Также существуют операции, которые ни относятся ни к тем ни к другим: сброс в «0», установка в «1» и т.п.
Чтобы произвести операцию, АЛУ должен взять откуда-то два числа. Выполнив операцию, опять же, должен положить куда-то ответ. Для этих целей служат регистры общего назначения – РОН. Их у нас 16. Каждый регистр – это ячейка памяти емкостью 8 бит. Иначе говоря – 1 Байт. Именно в них и хранятся числа, с которыми работает АЛУ.
Для каждой команды, которую выполняет АЛУ, необходимо назвать те регистры, с которыми он будет в данный момент работать.
Пример:
add R16,R17 — сложить значение регистров R16 и R17 и положить ответ в R16
sub R16,R18 — вычесть из R16, R18 и положить ответ в R16
and R24,R17 — произвести операцию «И» с R24 и R17, ответ – в R24
eor R16,R24 — произвести «исключающее ИЛИ» с R16 и R24, ответ – в R16.
Как вы могли заметить, ответ всегда помещается в тот регистр, который назван первым.
Естественно, старое содержимое регистра при этом затирается. Если нам нужно сохранить изначальное содержимое регистра, то перед операцией надо скопировать его в какой-нибудь другой регистр. Иначе – никак.
Оператор копирования – mov
Пример:
mov R16,R17
add R17,R24
Кроме РОН, на схеме присутствует ОЗУ – оперативная память контроллера. Для чего она?
Да для того, чтобы хранить данные при выполнении программы. Регистров ведь – всего 16. Для полноценной работы этого явно недостаточно. В регистрах хранится обычно только те данные, которые будут использоваться непосредственно прямо сейчас. Все остальное удобнее положить в память. Позднее мы поговорим о таких вещах как стек, указатели и пр. Пока что запомним, что память есть.
Ну вот. Откуда АЛУ берет данные для вычислений – разобрались. Теперь разберемся, откуда он берет команды.
А все очень просто!
Для этого существует регистр команд. В этот регистр постепенно выводятся команды той программы, которую выполняет контроллер. Эти команды касаются всего контроллера, а не только АЛУ (как мы помним, в контроллере просто тьма всего). Чтобы «выудить» из общей кучи «свою» команду, АЛУ постоянно заглядывает в регистр команд на предмет, нет ли там что-нить для него. И как только видит – стрелой мчится выполнять.
В регистр команд, команды попадают из программной памяти. Программная память – это ПЗУ (постоянное запоминающее устройство), в котором по каждому адресу записана одна команда. Вместе, все эти команды и составляют программу, и записаны в той последовательности, в какой они стоят в программе.
Чтобы «достать» команду из ПЗУ, надо сказать ему адрес ячейки памяти, в которой лежит эта команда. В ответ, ПЗУ выдаст содержимое этой ячейки. Команды записываются в ячейки в той последовательности, в которой стоят в программе. Поэтому, для того чтобы последовательно «перебирать» команды, достаточно просто каждый раз прибавлять к адресу «1».
Именно этим и занимается счетчик команд.
Однако же, программа, выполняющаяся внутри микросхемы и ни коим образом не связанная с внешним миром была бы просто никому не нужна. Для полноценной работы, контроллеру необходимо обмениваться данными с внешним миром.
Для этого существуют порты ввода/вывода (ПВВ).
Порт – это пачка однобитных каналов, каждый из которых может быть независимо настроен либо на ввод, либо на вывод.
В контроллере AT90s2313 два ПВВ – PortB и PortD.
PortB состоит из 8-ми каналов,
Portd – из 7-ми.
Эта «культяпость» порта D объясняется простой нехваткой ножек микросхемы. Просто разработчики очень хотели запихнуть все это дело в 20-ножный корпус, и поэтому урезали PortD на один канал.
Любая программа для контроллера начинается именно с настройки портов. Мы должны определить, какие каналы будут работать на ввод, какие – на вывод. По умолчанию, все каналы включены на ввод. Но это мы обсудим чуть позже.
Ну в общем-то, вот первоначальные сведения о микроконтроллерах.
Дальше мы поговорим о том как написать, скомпилировать и зашить в контроллер его программу.
Для чего нужны контроллеры температуры?
Эта статья служит обзором различных функций и типов регуляторов температуры. Более дешевый контроллер может обойтись дорого, если требуется частый ремонт связанных компонентов, если требуемая точность не может быть обеспечена или если авария произошла из-за неадекватных функций безопасности. Каждая задача должна быть тщательно изучена, и в зависимости от требований процесса должен быть использован правильный контроллер.
Начиная с типов датчиков и заканчивая требованиями к точности и удаленным доступом, существует множество факторов для выбора системы контроля температуры, помимо первоначальной стоимости, для обеспечения безопасной и эффективной работы оборудования и процессов нагрева.

Измерение и контроль температуры жизненно важны для обеспечения качества и безопасности производственных операций. Контроллеры температуры используются на технологических установках, в исследовательских лабораториях, центрах разработки продукции и других промышленных объектах. В чистых лабораторных условиях с контролируемой температурой недорогой готовый контроллер может быть подходящим продуктом. Однако эти же контроллеры обычно не выдерживают суровых условий, характерных для процессов тяжелой промышленности и удаленных районов.
Хотя поддержание контроля температуры является обязательным, это один из самых сложных параметров для успешного управления. В дополнение к первоначальной стоимости следует учитывать несколько важных факторов. Определить, какой контроллер использовать, может быть сложно, поскольку на базовом уровне все контроллеры работают одинаково: контроллер много раз в секунду отбирает значение, передаваемое датчиком температуры, и сравнивает эту переменную процесса с заданным значением. Всякий раз, когда переменная процесса отклоняется от заданного значения, контроллер посылает выходной сигнал, чтобы задействовать другие устройства, такие как механизмы нагрева и охлаждения, чтобы вернуть температуру к заданному значению.
Несмотря на то, что при первоначальном осмотре все терморегуляторы и контроллеры довольно похожи, разные типы контроллеров имеют характеристики и функции, дающие важные преимущества в зависимости от типа сферы применения.

Рейтинги IP и NEMA на контроллере важны для понимания уровня защиты передней панели контроллера.
Выбор датчика температуры
Обзор входных датчиков — лучшее место для начала при выборе контроллера для развертывания в местах с запыленностью, экстремальными температурами и шумом. В зависимости от сферы применения входные датчики могут включать термопары, RTD и линейные входы, такие как милливольт (мВ) и миллиампер (мА).
Для суровых условий обычно лучше всего подходят датчики термопары или RTD.
Термопарные датчики экономичны, прочны и обеспечивают точные измерения для диапазона значений температуры. Доступные в нескольких типах и конфигурациях, они хорошо работают во многих различных типах промышленных установок.
Термометры сопротивления обеспечивают большую точность измерения температуры, чем термопары, но они дороже, имеют более узкий температурный диапазон и менее прочны. Например, термометры сопротивления имеют верхний предел температуры приблизительно 1200°F (649°C) по сравнению с 4200°F (2316°C) для термопар.
Какой бы тип датчика температуры ни был выбран, контроллер должен иметь функцию обнаружения поломки датчика. Это оповещает контроллер, когда датчик неисправен или отсутствует, позволяя ему отрегулировать выходной сигнал до заданного значения, которое предотвратит причинение вреда оборудованию и персоналу.
Контроллеры включения/выключения
Контроллер включения/выключения стоит недорого, но он может только определить, нужно ли включить или выключить выход. Например, если уставка котла составляет 245°F (118°C), а значение температуры процесса падает до 244°F (117°C), контроллер отправит сигнал включения. Этот сигнал может включить нагреватель, открыть паровой клапан или предпринять другие действия для повышения температуры котла. Когда температура достигает заданного значения, выход контроллера возвращается в выключенное состояние.
Подобно домашнему термостату, этот тип контроллера хорошо работает в некоторых приложениях, но имеет некоторые ограничения. Диапазон, в котором работает контроллер, устанавливается на желаемое значение. (В приведенном выше случае он был бы установлен на один градус.) Контроллер не изменяет свое состояние выхода, пока переменная процесса не изменится хотя бы на один градус.
После изменения состояния выхода обычно требуется некоторое время для изменения переменной процесса, а это означает, что фактическая температура может отклоняться от заданного значения более чем на один градус. Это может быть приемлемо в некоторых приложениях, но не во всех.
Другая проблема заключается в том, что управление включением/выключением часто крайне неэффективно, поскольку управляющее устройство должно быть либо полностью включено, либо полностью выключено. Если управляемым устройством является клапан, контроллер включения/выключения может потребовать, чтобы клапан часто открывался и закрывался, что может привести к чрезмерному износу.
В дополнение к их ограниченным возможностям управления, эти устройства обычно не имеют дисплея и имеют ограниченные коммуникационные возможности. Поэтому эти базовые двухпозиционные контроллеры следует использовать только для некритичных тепловых систем без строгих требований к точности.
Когда предпочтительнее ПИД-регулирование
Более продвинутые цифровые регуляторы температуры имеют несколько выходов и программируемые функции. Они также обычно размещаются на передней панели с дисплеем для облегчения доступа оператора. Эти усовершенствованные контроллеры обеспечивают точное и стабильное управление за счет автоматического расчета пропорционально-интегрально-дифференциальных (ПИД) параметров для определения точного выходного значения, необходимого для поддержания заданной температуры.
Например, если время цикла установлено на 8 секунд, система, требующая 50-процентной мощности, будет включать выход на 4 секунды и выключать на 4 секунды. Когда выходная мощность должна составлять 25 процентов при том же 8-секундном цикле, выход будет включен на 2 секунды и выключен на 6 секунд (рис. 1). Этот тип циклического управления выходом часто используется для управления твердотельным устройством, таким как тиристор.

РИСУНОК 1. ПИД-регулирование повышает эффективность, обеспечивая точное выходное значение, необходимое для поддержания заданного значения.
Если управляемое устройство имеет возможность непрерывно изменять свое состояние, то выходной сигнал ПИД-регулятора можно настроить на непрерывное изменение для управления устройством. Например, выходной сигнал ПИД-регулятора от 4 до 20 мА можно использовать для непрерывного изменения положения регулирующего клапана. Этот тип непрерывного контроля может привести к очень точному контролю температуры.
Эти усовершенствованные цифровые контроллеры температуры обычно предлагают возможность программирования множества различных типов аварийных сигналов. Например, можно установить сигнализацию верхнего предела для предотвращения повреждения оборудования источником тепла путем отключения источника питания, если температура превысит заданное значение. Аварийные сигналы отклонения могут быть установлены на определенное положительное или отрицательное значение от заданного значения, чтобы уведомить оператора, если температура выходит за пределы допустимого диапазона.
Другая полезная функция обеспечивает сигнал тревоги, когда выходной сигнал составляет 100 процентов, но входной датчик не обнаруживает никаких изменений температуры по истечении определенного периода времени, что указывает на неисправность в контуре контроля температуры.
Очень гибкие контроллеры
Одноконтурные контроллеры обычно имеют один вход и один выход. Многоконтурные контроллеры имеют несколько входов и выходов и могут использоваться для одновременного управления несколькими контурами, позволяя контролировать больше функций технологической системы. Кроме того, многоконтурные контроллеры компактны и модульны. Они могут работать как в автономном режиме, так и в составе усовершенствованной системы автоматизации, такой как программируемый логический контроллер. При использовании в качестве замены для контроля температуры в любой из этих передовых систем автоматизации многоконтурный контроллер может обеспечить быстрое ПИД-регулирование, и он может разгрузить большую часть вычислений, требующих памяти, от процессоров системы автоматизации.
В качестве замены для нескольких контроллеров DIN, многоконтурные контроллеры обеспечивают единую точку программного доступа ко всем контурам управления. Эти контроллеры также обладают функциями, недоступными для традиционных контроллеров, устанавливаемых на панель. Они имеют более высокую плотность контура и меньшую занимаемую площадь, а проводка сокращается за счет общей точки подключения источника питания и цифровых интерфейсов связи.
По сравнению с более простыми контроллерами, многоконтурные контроллеры температуры обычно имеют расширенные функции безопасности для предотвращения несанкционированного доступа к важным настройкам. Эти функции обеспечивают полный контроль над информацией, считываемой с контроллера или записываемой в него, тем самым ограничивая информацию, которую оператор может прочитать или изменить.
Усовершенствованные контроллеры также обладают улучшенными коммуникационными возможностями, что позволяет им связываться с передовыми системами автоматизации по цифровым каналам связи. Их можно быстро и легко настроить с помощью программного обеспечения для ПК, что позволяет сохранять конфигурации для использования в будущем. При подключении к Интернету или интрасети к этим контроллерам можно получить удаленный доступ, что позволяет осуществлять полный удаленный просмотр, настройку и управление из любого места с доступом в Интернет или интранет.
Что такое программируемый логический контроллер





Контроллер (от англ. Control) — управление. Контроллером в автоматизированных системах называют техническое средство, выполняющее функции управления физическими процессами в соответствии с заложенным алгоритмом, с использованием информации, получаемой от датчиков и выводимой на окончательные устройства. Любое устройство, способное работать автоматически, имеет в своем составе управляющий контроллер — модуль, определяющий логику работы устройства.
Программируемые логические контроллеры (ПЛК) — технические средства, используемые для автоматизации технологических процессов. Это электронное специализированное устройство, работающее в реальном масштабе времени. Основным режимом работы ПЛК выступает его длительное автономное использование, зачастую в неблагоприятных условиях окружающей среды, без серьезного обслуживания и без вмешательства человека. ПЛК обычно применяются для управления последовательными процессами, используя входы и выходы для определения состояния объекта и выдачи управляющих воздействий.

Программируемый логический контроллер, представляют собой микропроцессорное устройство, предназначенное для сбора, преобразования, обработки, хранения информации и выработки команд управления, имеющий конечное количество входов и выходов, подключенных к ним датчиков, ключей, исполнительных механизмов к объекту управления, и предназначенный для работы в режимах реального времени.

Для используемых в настоящее время релейно-контактных систем управления характерна невысокая надёжность, наличие открытых контактов и др. Применение программируемых логических контроллеров (ПЛК) для автоматизации локальных систем управления является наиболее эффективным.
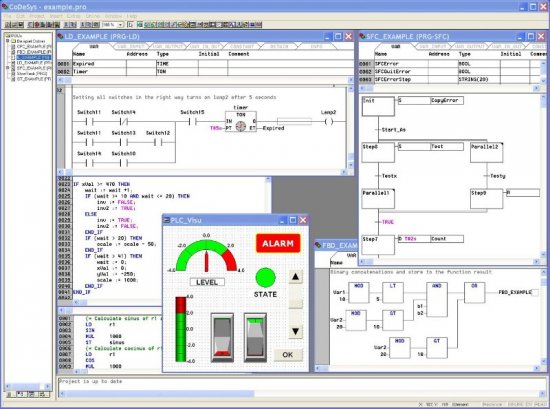
ПЛК программируются в соответствии со стандартом МЭК-61131-3. Программируются ПЛК с помощью специализированных комплексов, один из наиболее популярных является CoDeSys. Он включает в себя следующие языки: графические (Ladder Diagram, Function Block Diagram, Sequential Function Chart, Continuous Function Chart), текстовые (Instruction List, Structured Text).

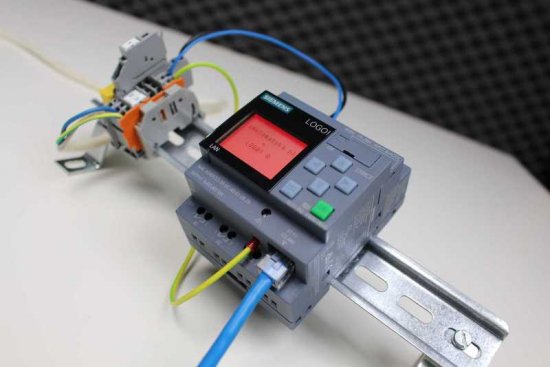
Первый в мире программируемый логический контроллер появился в середине XX века. Modicon 084 представлял собой шкаф с набором соединённых между собой реле и контактов, его память составляла лишь 4 килобайта. Термин ПЛК ввел Аллен-Брадли в 1971. Вместе с Ричардом Морли он является «отцом ПЛК».
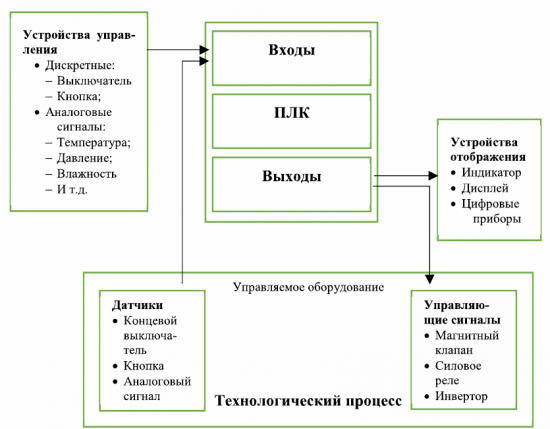
Структура работы программируемого логического контроллера:
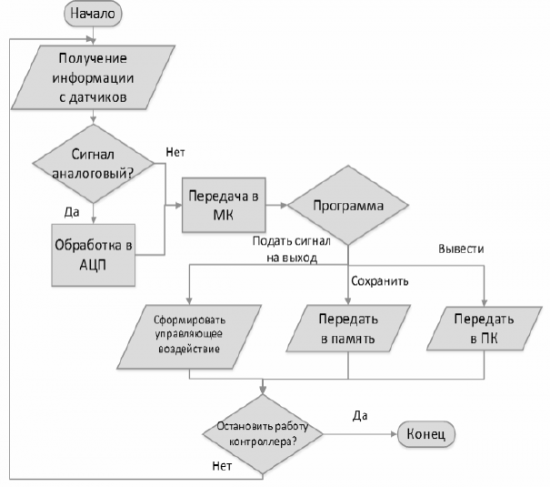
Алгоритм работы ПЛК:
В качестве основного режима работы ПЛК выступает его длительное автономное использование, зачастую в неблагоприятных условиях окружающей среды, без серьезного обслуживания и практически без вмешательства человека.

ПЛК имеют ряд особенностей, отличающих их от прочих электронных приборов, применяемых в машиностроении:
- в отличие от микроконтроллера (однокристального компьютера) — микросхемы, предназначенной для управления электронными устройствами — областью применения ПЛК обычно являются автоматизированные процессы промышленного производства в контексте производственного предприятия;
- в отличие от компьютеров ПЛК ориентированы на работу с агрегатами машин через развитый ввод сигналов датчиков и вывод сигналов на исполнительные механизмы, ориентированных на принятие решений и управление оператором;
- в отличие от встраиваемых систем ПЛК изготавливаются как самостоятельные изделия, отдельные от управляемого при его помощи оборудования.
- наличие расширенного числа логических операций и возможность задания таймеров и счетчиков.
- все языки программирования ПЛК имеют легкий доступ к манипулированию битами в машинных словах, в отличие от большинства высокоуровневых языков программирования современных компьютеров.
Существуют ПЛК разного уровня сложности в зависимости от сложности решаемых задач автоматизации.
Основные операции ПЛК соответствуют комбинационному управлению логическими схемами специфических агрегатов — механических, электрических, гидравлических, пневматических и электронных.
В процессе управления контроллеры генерируют выходные сигналы (включить — выключить) для управления исполнительными механизмами (электродвигателями, клапанами, электромагнитами и вентилями) на основании результатов обработки сигналов, полученных от датчиков, либо устройств верхнего уровня.
Современные программируемые контроллеры выполняют также и другие операции, например, совмещают функции счетчика и интервального таймера, обрабатывают задержку сигналов.

Программируемые логические контроллеры среднего и высокого уровня, как правило, имеют встроенные аппаратно-программные средства управления движением, в частности, модули быстродействующих счетчиков, модули позиционирования и др., которые дают возможность сравнительно просто реализовать функции управления движением и обеспечить позиционирование с высокой точностью.
Конструктивно ПЛК приспособлены для работы в типовых промышленных условиях, с учетом загрязненной атмосферы, уровней сигналов, термо- и влагостойкости, ненадежности источников питания, а также механических ударов и вибраций. С этой целью аппаратная часть заключается в прочный корпус, минимизирующий негативное влияние ряда производственных факторов.

Главным отличием ПЛК от релейных схем управления является алгоритмы, которые реализованы с помощью программ. На одном контроллере можно реализовать схему, эквивалентную тысячам элементов жесткой логики. При этом надежность работы схемы не зависит от ее сложности.
Программируемые логические контроллеры традиционно работают в нижнем звене автоматизированных систем управления предприятием (АСУ) — систем, непосредственно связанных с технологией производства. ПЛК обычно являются первым шагом при построении систем АСУ. Это объясняется тем, что необходимость автоматизации отдельного механизма или установки всегда наиболее очевидна. Она дает быстрый экономический эффект, улучшает качество производства, позволяет избежать физически тяжелой и рутинной работы. ПЛК по определению созданы именно для такой работы.
Основное преимущество ПЛК является в том, что один маленький механизм может заменить огромное количество электромеханических реле, а также быстрое время сканирования, компактные системы ввода/вывода, стандартизированные средства программирования и специальные интерфейсы, позволяющие подключать нетрадиционные устройства автоматики непосредственно к контроллеру или объединять разное оборудование в единую систему управления.
Выбор программируемого контроллера является важной и сложной задачей при создании систем автоматического управления технологическими параметрами на любом промышленном предприятии. При его выборе необходимо учесть и оценить большое количество факторов. Объединив технологические требования к конкретному объекту автоматического управления со сравнительным анализом современных программируемых логических контроллеров, можно принять правильное решение.
Для чего нужен Контроллер в СКУД
Контроллер управления доступом – это сердце Системы Контроля и Управления Доступом (СКУД), контролирующее всю систему, отсюда и название. Контроллер как правило не виден обычным пользователям на защищаемом объекте, поскольку он устанавливается в отдельной комнате, серверной или коммуникационном шкафу. Причина, по которой он должен находиться за закрытыми дверями, заключается в том, что всё оборудование, все считыватели и запирающие устройства подключены к контроллеру. Это электронное устройство, предназначенное для идентификации пользователей и контроля входа в охраняемые зоны или выхода с них. Когда учётные данные поступают на контроллер, он сравнивает их со своей базой данных и определяет, следует ли разрешить доступ к конкретной точке доступа в определённое время и дату.
Контроллер получает учётные данные идентификатора от считывателя и сравнивает их с настроенными правилами для конкретного идентификатора и на основе этого принимает решение, разрешён или запрещён доступ, а запирающее устройство открывается или остаётся заблокированным. Таким образом контроллер управляет доступом к точкам прохода на объекте.
Функционал контроллеров может отличаться в зависимости от модели, но большинство обеспечивает некоторые стандартные возможности. Типичный контроллер доступа поддерживает от 1 до 4 считывателей. Однако количество устанавливаемых контроллеров будет зависеть от количества точке прохода. Если точек прохода больше, то можно добавлять контроллеры. Контроллеры управления доступом обеспечивают эффективный и безопасный способ контроля доступа к вашему объекту или территории.
Типы подключения контроллеров
Последовательные контроллеры.
Контроллеры подключаются к главному компьютеру через промышленный интерфейс RS-485.
Последовательные главный контроллер и контроллеры второго уровня.
Все запирающие устройства подключены к контроллерам второго уровня. Вспомогательные контроллеры обычно не принимают самостоятельного решения о доступе, а пересылают все запросы главному контроллеру. Главный контроллер обычно поддерживает от 16 до 32 контроллеров второго уровня.
Последовательные главный контроллер и интеллектуальные считыватели.
Все запирающие устройства подключены к интеллектуальным считывающим устройствам. Считыватели обычно не принимают решения о доступе и пересылают все запросы контроллеру. В случае, если соединение с контроллером недоступно, считыватели могут использовать внутреннюю базу данных для принятия решения о доступе и записи событий.
Последовательные контроллеры с терминальным сервером.
С развитием и расширением использования компьютерных сетей, производители внедряют решения с сетевым подключением. Добавлением в СКУД терминального сервера, устройства, преобразующего данные для передачи через LAN или WAN.
Контроллеры, подключенные к сети Ethernet.
Встроенный сетевой интерфейс позволяет быстрее передавать пользовательские данные и может выполняться параллельно, что делает систему более отзывчивой. Для обеспечения резервной настройки главного ПК не требуется никакого специального оборудования, в случае выхода из строя основного компьютера, дополнительный ПК может незамедлительно начать опрос сетевых контроллеров.
Заключение
Итак, контроллер – это устройство, соединяющее все другие части вашей системы контроля управления доступом, такие как устройства чтения карт, запирающие устройства и прочее оборудование. Контроллеры используются для обработки операций контроля доступа для всего объекта. Количество контроллеров будет определяться размером объекта, масштабом системы и целями его использования. Контроллеры обычно устанавливаются в серверных, в коммуникационных шкафах. В памяти контроллера содержится база данных, учётных данных записывается информация о событиях активности системы.
- Программное обеспечение
- Контроллеры
- Считыватели
- Дополнительное оборудование
- Модули